關于餐廳送餐服務機器人的研究
2020-10-20 06:48:09常朝正劉東靜何梓安黎乃斌陳珍
數碼設計 2020年8期
關鍵詞:人工智能
常朝正 劉東靜 何梓安 黎乃斌 陳珍
摘要:餐廳送餐服務機器人是一種能夠自主或半自主地為顧客提供服務、改善員工工作強度的智能機器人,包含了環境感知、路徑規劃、智能控制等諸多功能。在勞動力結構性短缺和勞動力成本提高的背景下,餐廳服務的機器人符合市場實際急需,可以降低成本和提高效率,具有廣闊的行業發展前景。
關鍵詞:機器人;人工智能;餐飲;送餐
中圖分類號:TP242?文獻標識碼:A?文章編號:1672-9129(2020)08-0029-01
人工智能技術發展迅速,服務型機器人作為人工智能技術的代表產品,應用場景廣泛。餐飲行業蓬勃發展,分布廣泛,但大部分餐飲行業仍然是使用人工送餐服務。具有人工成本高、接觸距離近、送餐失誤、存在人事糾紛等缺點。使用餐廳送餐服務機器人可以實現降低人工成本、零接觸、零失誤、智能化送餐服務,具有廣泛的應用前景。
1?系統架構
餐廳送餐服務機器人工作流程如下:由餐廳工作人員將客戶點餐放置于餐盤,餐盤上放置顧客餐桌號牌;機器人在待命區識別到取餐盤區有準備好的餐盤,隨即移動至取餐盤處,啟動攝像頭識別顧客餐桌號,并完成自動取餐盤的動作;機器人根據客戶餐桌號自動規劃路徑執行送餐任務,將客戶的點餐送至規定餐桌。
根據工作要求構建的餐廳助手服務機器人核心板采用Zynq7020全可編程工作平臺,外擴了羅技公司USB攝像頭的,用于采集服務數據;移動平臺采用ZRobot-III智能小車;送餐工作平臺是一個圓工作臺附加固定餐盤的機構和機械手臂構成。
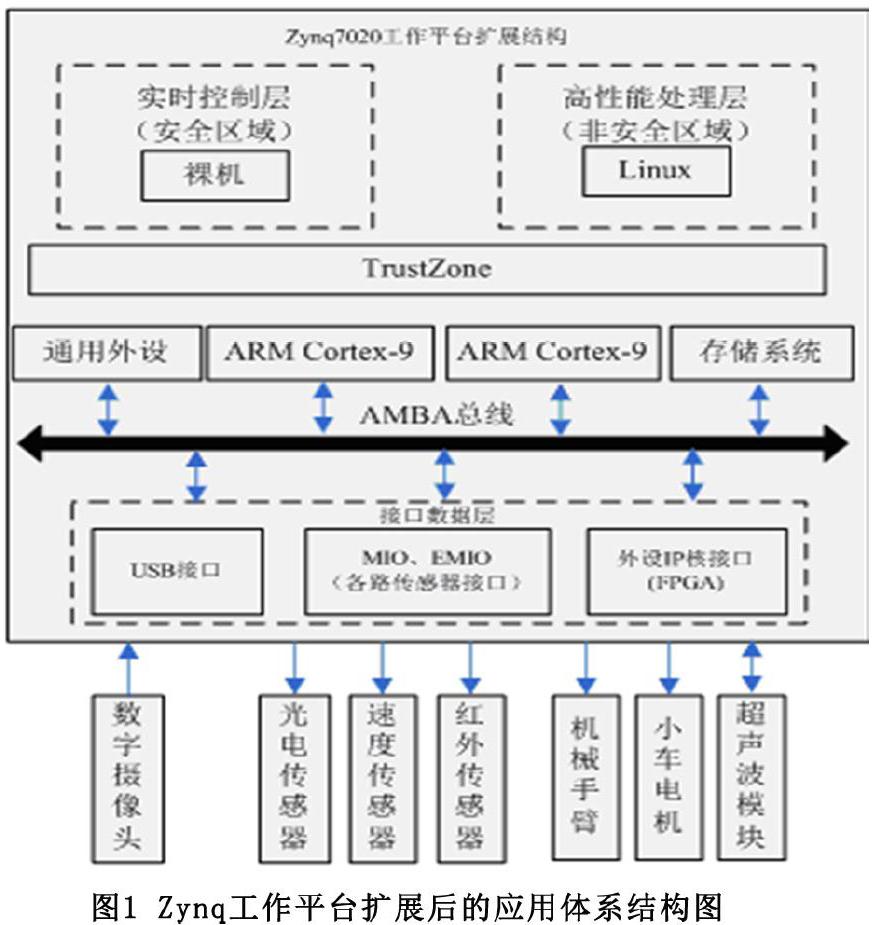
結合Zynq7020雙核優勢,構建非對稱混合異構系統“Linux操作系統+裸機應用環境”的服務機器人軟件開發環境。服務機器人高性能處理層采用Linux操作系統,完成圖像采集、識別、雙核通信等任務。Linux提供封裝好的網絡和視覺庫API,易于使用,減少工作量。硬件工程的生成的超聲波、電機、舵機等模塊在應用過程中要求的實時性較高,采用裸機應用系統進行驅動程序的開發和調用。這樣可以讓兩個系統優勢互補,完成一個性能強大、功能完善的服務機器人應用平臺。Zynq7020工作平臺擴展外設后的應用體系結構如圖1。
2?程序設計
2.1 ?Linux系統圖像識別應用程序。Linux系統下的圖像識別應用程序主要包括圖像的獲取、圖像的處理和分析、輸出或顯示。圖像的獲取實際上是將被測物體的可視化圖像和內在特征轉換成能被計算機處理的一系列數據。視覺信息的處理技術主要依賴于圖像處理方法,它包括圖像增強、數據編碼和傳輸、平滑、邊緣銳化、分割、特征抽取、圖像識別與理解等內容。
2.2 ?SDK裸機應用程序設計。裸機應用程序主要實現服務機器人的服務功能,包括底層速度傳感器、光電傳感器、超聲波等的驅動函數、機械手動作、電機控制(控制機器人前進、后退、拐彎等)、路徑識別等,底層驅動函數包括:(1)小車電機運動控制程序,對車輪電機的轉速和方向進行控制;(2)核間通信函數,異構系統之間的通信協同;(3)超聲波模塊驅動程序,實現避障功能;(4)光電傳感器驅動程序,實現巡線功能和定位功能;(5)舵機驅動程序,實現機械手臂的抓握功能;(6)測速傳感器驅動程序,實現小車速度的反饋功能;(7)液晶驅動程序,實現本地數據顯示。
3?開發環境
3.1基于zynq芯片的軟硬件協同設計。對于zynq7020芯片,Vivado除了將VHDL描述的功能模塊進行綜合、實現生成PL(FPGA)上電后能夠加載的BIT流,還生成PS(ARM)的一些配置文件等。
3.2 ?SDK構建并編譯軟件應用程序。SDK可以創建工程、編譯代碼,制作鏡像文件和擦寫 flash、FPGA,與處理器進行通信,將文件裝載到內存,讀寫任意內存單元與寄存器的值,很方便進行系統調試。另外一項非常重要的工作是使用 SDK 制作開發板可以識別的系統鏡像、直接與硬件交互進行開發調試工作。
4?特色和創新點
4.1結合Zynq7020雙核優勢,構建非對稱混合異構系統“Linux操作系統+裸機應用環境”的服務機器人軟件開發環境。
4.2 ?Linux系統下的圖像識別應用程序主要包括圖像的獲取、圖像的處理和分析、輸出或顯示。
4.3使用 SDK 制作開發板可以識別的系統鏡像、直接與硬件交互進行開發調試工作。
4.4利用SDK裸機應用程序實現服務機器人的服務功能,包括底層速度傳感器、光電傳感器、超聲波等的驅動函數、機械手動作、電機控制(控制機器人前進、后退、拐彎等)、路徑識別等。
參考文獻:
[1]Mike Buzalka.5 things: Colleges food delivery robots expand into local community[J]. Food Management,2020.
[2]袁銀瑤,宋天麟.送餐服務機器人研究及設計[J].科技創新與應用,2017(04):62.
[3]陳凱. 智能送餐機器人控制系統的設計與實現[D].杭州電子科技大學,2017.
(本文通信作者:劉東靜)
猜你喜歡
西安航空學院學報(2022年2期)2022-07-04 07:45:42
汽車零部件(2020年3期)2020-03-27 05:30:20
表面工程與再制造(2019年1期)2019-05-11 08:52:04
商界(2019年12期)2019-01-03 06:59:05
家庭影院技術(2018年9期)2018-11-02 05:31:34
IT經理世界(2018年20期)2018-10-24 02:38:24
通信電源技術(2018年3期)2018-06-26 06:33:30
軍營文化天地(2018年1期)2018-02-10 05:19:25
小康(2017年16期)2017-06-07 09:00:59
學與玩(2017年12期)2017-02-16 06:51:12
