低速高性能無刷雙饋電機的直接轉矩控制系統
2020-10-21 11:19:02侯曉鑫任瑞敏游國棟張志強
天津科技大學學報 2020年5期
侯曉鑫,任瑞敏,游國棟,張志強
(1. 天津科技大學電子信息與自動化學院,天津 300222;2. 中科和光(天津)應用激光技術研究所有限公司,天津 300300)
隨著全球環境的惡化和資源的枯竭,開發各種新能源已成為一項異常緊迫的任務,其中風能作為一種高效可再生的清潔能源受到普遍重視.電機是風力發電系統中最重要的部件,目前應用最廣泛的是雙饋電機,然而雙饋電機中存在的電刷和滑環增加了巨大的維護成本.無刷雙饋電機(brushless doubly-fed machine,BDFM)取消了雙饋電機的電刷和滑環,通過變頻器的功率僅為轉差功率,降低了對變頻器容量的要求,因此不僅能夠降低維護成本和投入成本,而且能夠提高系統的可靠性[1-2].BDFM 既可以應用于風力發電系統,也可以應用于風機調速系統,具有成為下一代風力電機的潛力,因此對 BDFM 的研究具有重要的現實意義[3-4].
然而,高性能的控制系統是 BDFM 在實際工業當中得到應用的關鍵問題之一[5-6].直接轉矩控制(direct torque control,DTC)是在矢量控制之后發展起來的又一種新的交流電機高性能控制調速方法[7-9].該方法與矢量控制完全不同,直接轉矩控制是直接將定子磁鏈和轉矩作為控制量進行反饋控制,只需要觀測定子磁鏈,對電機轉子參數的依賴性小,而且不需要像矢量控制那樣進行磁鏈定向、電流環控制,因此控制結構更加簡單,響應更加快速,這種無刷雙饋電機的控制策略可以進一步提高電機的動態響應性能.但是,傳統的無刷雙饋電機直接轉矩控制系統中的速度環控制無法兼顧抗跟蹤和抑制干擾,尤其是在低速時的性能不佳[10-11].
在異步電機和永磁同步電機上的速度環控制中,比例積分(PI)控制、雙自由比例積分速度控制、模糊控制、預測控制、滑模控制等速度控制策略得到了廣泛的應用[12-15],相對比 BDFM 的結構和控制機理都要比異步電機和永磁同步電機復雜,這些技術不能直接應用于 BDFM 上.在上述控制策略中,雙自由比例積分速度控制不僅繼承了 PI控制的物理意義簡單、易于實現等優點,而且能夠兼顧系統的速度跟隨特性和抗干擾性[16-18],因此在無刷雙饋電機直接轉矩控制的基礎上,考慮電機摩擦因數設計了雙自由比例積分轉速控制器,能夠同時兼顧速度跟蹤和抑制干擾,尤其是改善低速時的性能.
1 無刷雙饋電機數學模型
無刷雙饋電機由兩個極對數不同的定子繞組和一個特殊的轉子繞組組成,其中一個定子繞組直接與電網相連,稱為功率繞組;另一個定子繞組與變頻器相連,稱為控制繞組.兩定子繞組間沒有直接耦合而是通過轉子間接耦合,轉子起極數調節器的作用.無刷雙饋電機靜止坐標系下的數學模型為[1-2]
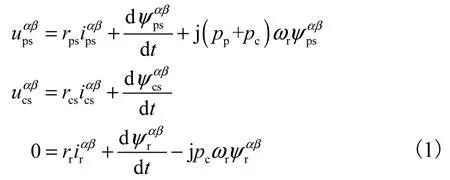
磁鏈方程為

式中:l為電感;lpm和lcm分別為功率繞組和控制繞組定轉子之間的互感.
無刷雙饋電機電磁轉矩為

無刷雙饋電機的運動方程為

式中:Te和Tl分別為無刷雙饋電機的電磁轉矩和負載轉矩;B為摩擦因數;J為電機軸上的總轉動慣量.
2 基于雙自由度的無刷雙饋電機直接轉矩控制系統
2.1 無刷雙饋電機直接轉矩控制系統
在無刷雙饋電機直接轉矩控制系統中,通過速度傳感器測量的電機轉速與給定的轉速進行比較,經過PI控制器得到電磁轉矩給定值,通過檢測功率繞組定子電壓和定子電流,控制繞組的定子電壓和定子電流,作為控制繞組定子磁鏈和電磁轉矩觀測器的輸入,磁鏈和電磁轉矩觀測器的輸出與磁鏈給定值和電磁轉矩給定值做比較,可得定子磁鏈和電磁轉矩偏差.將磁鏈偏差和電磁轉矩偏差分別經過滯環調節器,根據滯環調節器的輸出和相應的磁鏈所在的位置,查找事先制訂好的電壓矢量開關矢量表(表1),選擇相應的空間電壓矢量來對逆變器進行控制.無刷雙饋電機直接轉矩控制系統框圖如圖 1所示.其中功率繞組和控制繞組定子磁鏈的觀測器采用 電 壓 電 流 模 型 ,通過功率繞組和控制繞組定子磁鏈和電流的叉積可以得到電磁轉矩,Te=
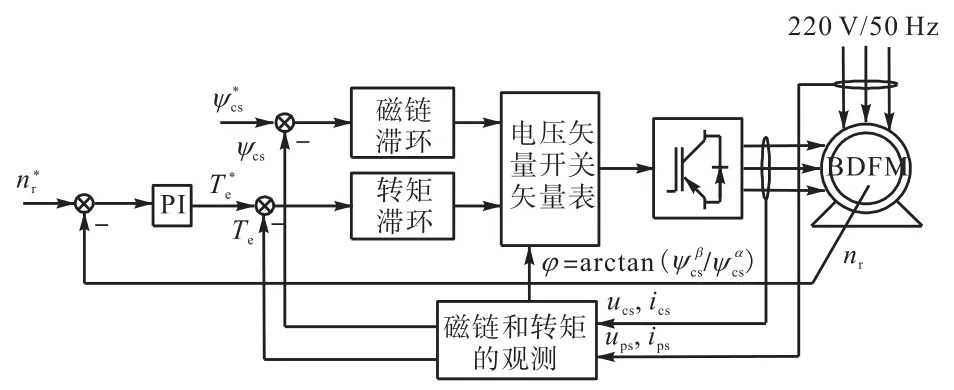
圖1 無刷雙饋電機直接轉矩控制系統Fig. 1 Direct torque control system of BDFM
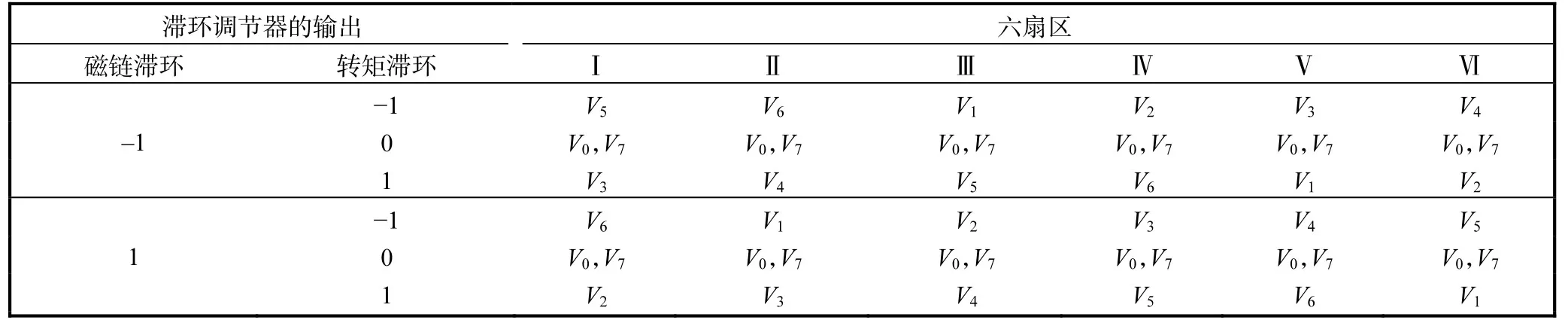
表1 直接轉矩控制電壓矢量開關矢量Tab. 1 Switching vector of direct torque control voltage vector
2.2 雙自由度比例積分轉速控制器
為了兼顧低速時無刷雙饋電機直接轉矩控制系統速度環的跟蹤性能和抑制干擾的能力,結合無刷雙饋電機的控制特性設計了一種采用速度反饋的雙自由度比例積分轉速控制器,結構如圖 2所示[17-18].其中:N(s)為高頻測量噪聲;轉矩滯環看作是理想環節并忽略磁鏈諧波.G(s)是考慮摩擦因數的無刷雙饋電機(BDFM)運行方程的傳遞函數.
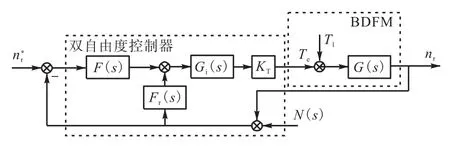
圖2 雙自由度比例積分轉速控制器結構Fig. 2 Structure of dual degree of freedom proportional integral speed controller
由圖 2可以看出,此時速度環輸入-輸出的傳遞函數為

速度環負載擾動-輸出閉環傳遞函數為

速度環誤差-輸出閉環傳遞函數為

由式(5)—(7)可知:引入反饋控制Fr(s) = Kwp(1 -α)后,由速度環輸入-輸出、擾動-輸出和誤差-輸出的傳遞函數可知無刷雙饋電機的轉速響應特性和負載響應特性不僅取決于系數Kwp和Kwi,而且還受參數α的影響.由此,反饋控制器不僅會對速度環的跟蹤性能產生作用,而且還會對速度環抗干擾性產生影響,通過選擇合適的反饋控制器,可以靈活實現極點配置.
3 仿真驗證
為了驗證上述分析的正確性,對基于雙自由度的無刷雙饋電機直接轉矩控制系統進行了仿真研究.無刷雙饋電機的轉速運行范圍為0~1000r/min,額定功率為3.7kW,額定磁鏈為1.2Wb,額定轉矩為30N·m.功率繞組的供電電壓和頻率為 220V 和50Hz,控制繞組與逆變器連接,逆變器的直流母線電壓為 500V.控制系統采用轉速外環,控制繞組定子磁鏈和電磁轉矩滯環調節器的上限和下限分別為0.05和-0.05、0.5和-0.5.
圖3為PI轉速控制器和雙自由度比例積分轉速控制器下的負載轉矩發生突變時無刷雙饋電機的響應波形.仿真中,轉速給定為 100r/min,磁鏈給定為1.2Wb,負載轉矩為20N·m,在1.1s的時候轉矩突變為30N·m,轉速環控制器輸出的限值為±35.圖3(a)和圖3(b)分別為PI控制器不同參數和雙自由度控制器下的轉速和轉矩跟蹤曲線.由仿真曲線可以看出:當 PI控制器參數為kp=1和kI=4時,轉速的響應曲線經過0.3s左右趨于穩定,而且轉速存在超調,在負載轉矩突變的時候,轉速經過一段時間的動態調節后,穩定于給定轉速,經過大約0.2s的時間轉速調節器能夠補償負載轉矩的擾動.隨著 PI控制器參數的變化,轉速的響應時間幾乎不變,超調變小,但是在負載轉矩突變的時候需要調節的時間變長;當 PI控制器參數為 kp= 0 .25和kI=1時,調節時間達到了大約0.5s,因此PI控制器無法兼顧抗跟蹤和抑制干擾.當采用雙自由度比例積分控制器時,控制器參數為Kwp=96和Kwi=96以及α= 1 00/96,由圖 3(a)可知,轉速的響應曲線經過 0.1s左右趨于穩定且沒有超調,在負載轉矩突變的時候,對轉速幾乎沒有影響.圖 3(c)為雙自由度轉速控制器下的磁鏈波形,同時給出了磁鏈局部放大的變化波形.圖 3(d—f)為雙自由度轉速控制器下的功率繞組 ABC三相電流、控制繞組ABC三相電流和轉子繞組ABC三相電流的波形.由圖 3(a—f)可知,當電機受到外界干擾(轉矩突變)時,轉矩幾乎是瞬時達到穩定值 30N·m,雙自由度轉速控制器能夠同時兼顧速度跟蹤和抑制干擾,在負載突變的條件下驗證了系統的穩定性.
圖 4為雙自由度比例積分轉速控制器下的轉速發生階躍變化時無刷雙饋電機的動態響應波形.
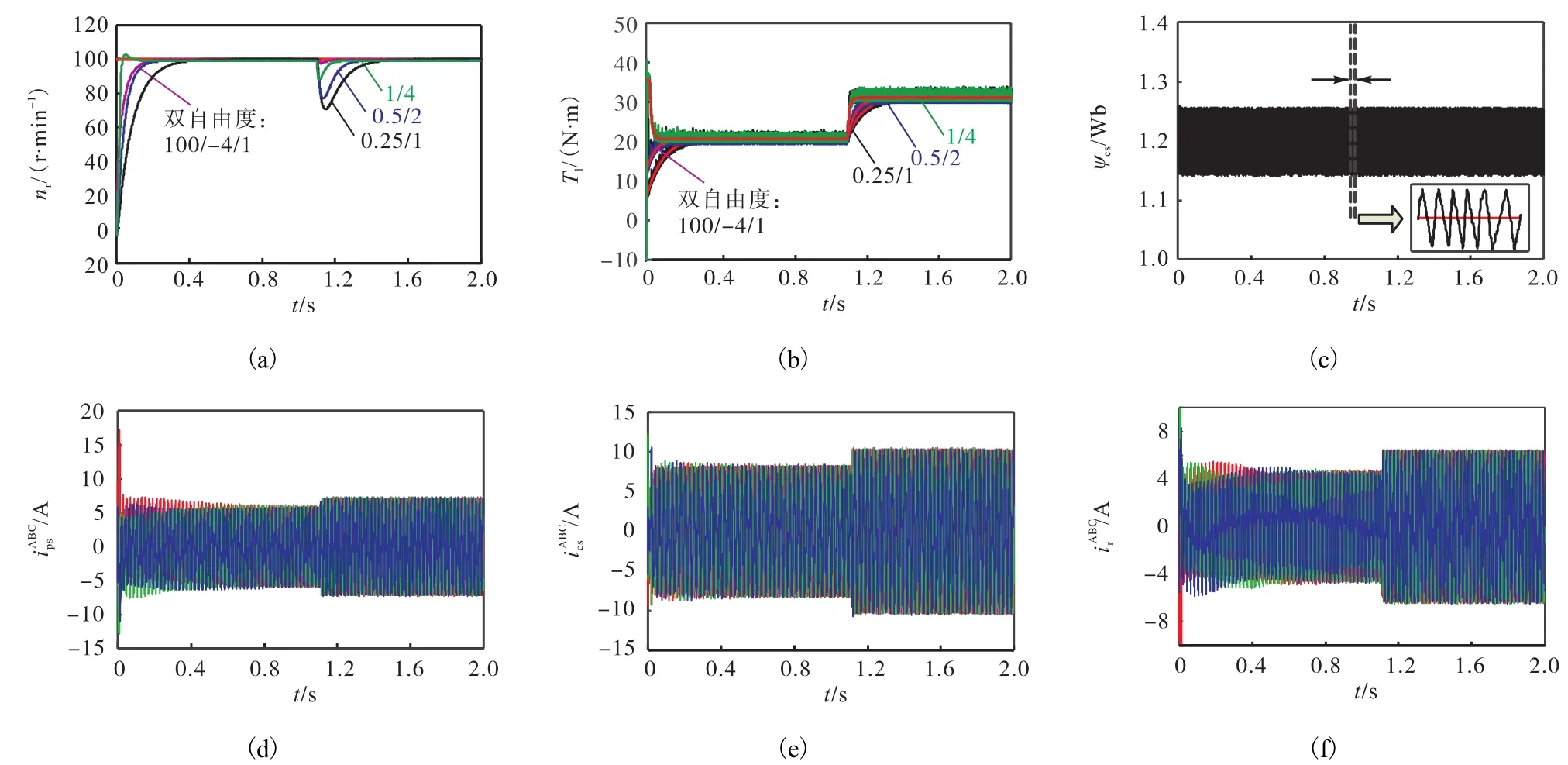
圖3 PI轉速控制器和雙自由度比例積分轉速控制器下負載轉矩突變時的響應波形Fig. 3 Load torque sudden change response waveform under PI speed controller and double degree of freedom proportional integral speed controller
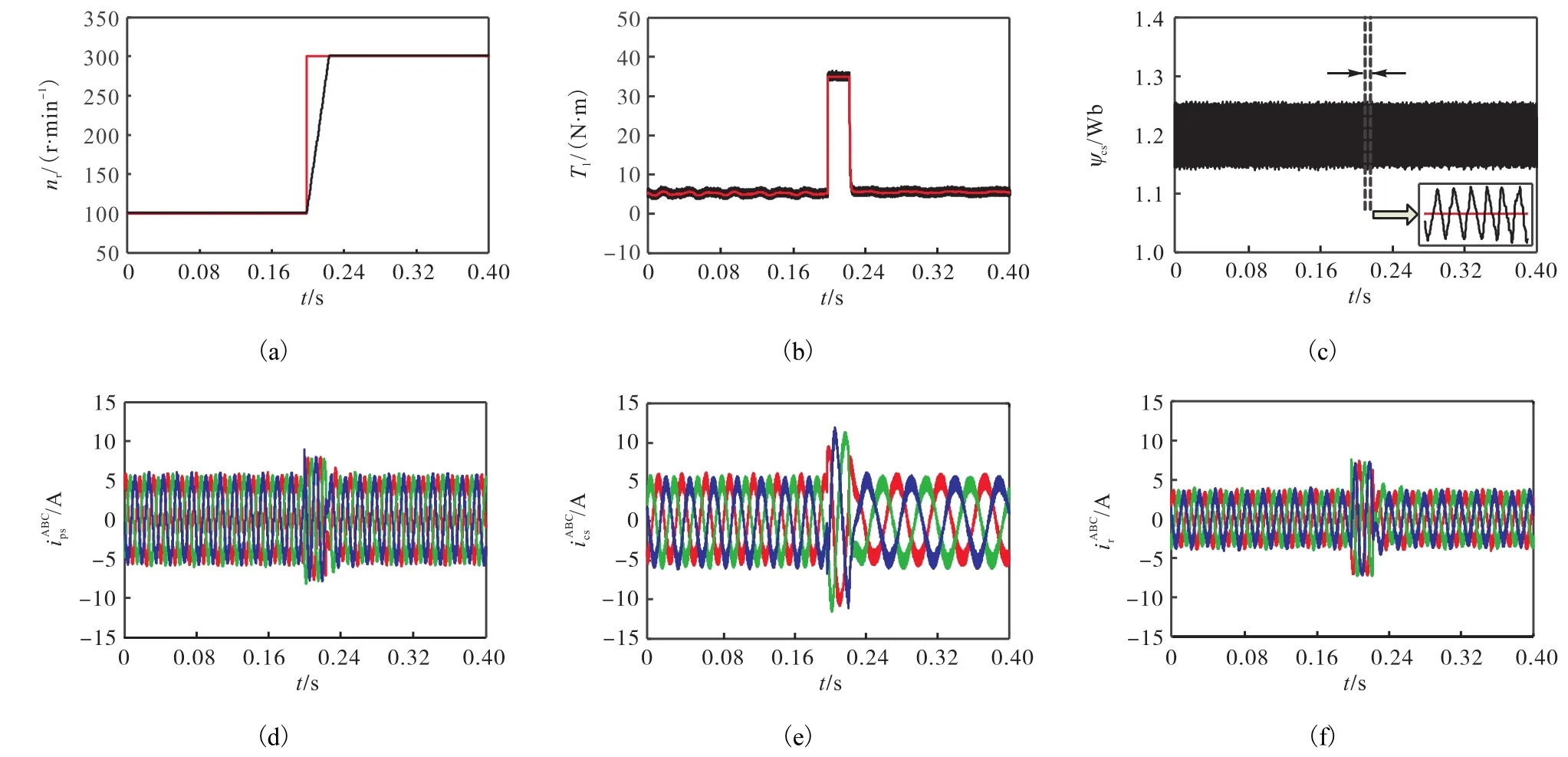
圖4 雙自由度比例積分轉速控制器下轉速發生階躍變化時的響應波形Fig. 4 Response waveform of speed step change under the double degree of freedom proportional integral speed controller
仿真中,轉速給定為 100r/min,在 0.2s時從100r/min變為300r/min,磁鏈給定為1.2Wb,負載轉矩為5N·m.圖4(a)為雙自由度控制器下的轉速跟蹤曲線,由跟蹤曲線可以看出:當轉速發生階躍變化時,電機的轉速能夠快速地、無超調地跟蹤給定值.圖 4(b—f)為雙自由度控制器下的轉矩、磁鏈、功率繞組 ABC三相電流、控制繞組 ABC三相電流和轉子繞組ABC三相電流的波形.由BDFM的運行原理可知電機的轉速為 nr=60( fp±fc) /( pp+pc),其中:fp為功率繞組定子通過電網供電的頻率(50Hz);fc為控制繞組定子通過逆變器供電的頻率.由轉速公式可以看出:在功率繞組定子頻率不變時,通過調節控制繞組定子的供電頻率就可以調節電機的轉速.因此,由圖 4(a)和圖 4(e)可以看出,當電機的轉速由100r/min變為 300r/min時,控制繞組定子的供電頻率也發生改變.
由仿真結果可知,基于雙自由度的直接轉矩控制系統在負載轉矩突變時具有良好的調節性能,在轉速指令階躍變化時具有良好的動態特性.控制繞組的定子磁鏈能夠很好地跟蹤給定值,轉速和轉矩的變換幾乎對其沒有影響.
4 結 論
直接轉矩控制是一種普遍適用的反饋控制的設計方法,適用于異步電機也適用于無刷雙饋電機,其優點是控制系統對模型和參數的依賴性低;但是直接轉矩控制系統常規PI轉速控制器不能同時得到較小的電機轉矩的階躍響應超調量和響應時間,以及較強的抗階躍負載變化的干擾能力.采用雙自由度比例積分轉速控制器能夠同時兼顧速度跟蹤和抑制干擾,實現了速度的無超調控制,在不影響穩態精度的前提下,提高了系統的動態響應性能.