不同路況對人體下肢肌肉特征參數(shù)的影響
2020-10-21 11:19:06蘇子懿張峻霞
天津科技大學(xué)學(xué)報 2020年5期
劉 琪,蘇子懿,張峻霞
(天津市輕工與食品工程機械裝備集成設(shè)計與在線監(jiān)控重點實驗室,天津科技大學(xué)機械工程學(xué)院,天津 300222)
動作輔助系統(tǒng)是康復(fù)輔助設(shè)備的核心模塊,其智能化水平的提高能夠明顯改善老年人等有行走功能障礙群體的康復(fù)訓(xùn)練效果.其中,有效地獲取人體在不同運動模式下的步態(tài)信息并將其應(yīng)用在智能動作輔助系統(tǒng)、控制系統(tǒng)的設(shè)計上是輔助設(shè)備智能化水平提高的重要一環(huán).
路況是影響步態(tài)的重要因素[1].樓梯是日常生活中常見的行走地形,在樓梯行走時,有受重傷的高風(fēng)險性[2-4].樓梯行走要求行走者身體的質(zhì)心(COM)必須在垂直和水平方向上移動,并與下肢關(guān)節(jié)運動、肌肉力量和心血管系統(tǒng)相協(xié)調(diào)[4].因此,樓梯行走被認為是最具挑戰(zhàn)性的步態(tài)任務(wù)[5].除樓梯行走外,在建筑和自然環(huán)境中也常會遇到傾斜表面,在斜坡行走時消耗的體能也比平地行走時大[6].人體在斜坡行走時,特別是在坡度較大的斜坡行走時,其行走姿勢的生物力學(xué)要求較平地行走時發(fā)生了改變,要求下肢肌肉,例如臀部肌腱、上斜肌和股直肌以及股外肌有更強的活動能力.
國內(nèi)外已有對于路況與人體特征參數(shù)相關(guān)性的研究,Bovi等[7]定性分析了人體腳趾行走、腳跟行走和上樓梯和下樓梯時的下肢運動學(xué)特性,動力學(xué)特性以及肌肉活性,但其僅研究針對不同行走任務(wù)的表面肌電信號(EMG)包絡(luò)解剖圖.黃立男等[8]和金德聞等[9]通過提取人體下肢肌肉肌電信號的特征參數(shù)來識別不同的行走路況,如水平地面行走、障礙物跨越、上坡和下坡、上樓梯和下樓梯.Ma等[10]分析了人體在 4種不同路況下行走時脛骨前肌肌電信號的變化,包括正常行走、障礙跨越、上樓梯和下樓梯.然而,目前很少有系統(tǒng)分析不同路況對股內(nèi)側(cè)肌(VMO)、脛骨前肌(TIB)、半腱肌(SEM)和腓腸內(nèi)肌(MED)等不同肌肉肌電信號的影響.
因此,本文通過分析人體在 5種不同路況(平地、上坡、下坡、上樓、下樓)下行走時 4組肌群(VMO、TIB、SEM 和 MED)的表面肌電信號特征參數(shù),其中包括肌電振幅(AMP)、肌電積分(IEMG),以及頻域特征參數(shù)平均頻率(MPF)、中位頻率(MF),這些參數(shù)最能體現(xiàn)肌肉群運動時的機制特點,由此可以探究人體在不同路況行走時雙下肢主要肌群的運動機制,本文的研究結(jié)果可為地形自適應(yīng)輔助設(shè)備的設(shè)計和改進提供基本理論支持.
1 材料與方法
1.1 研究對象
本實驗的目的是找到不同下肢動作過程與肌肉表面肌電信號之間的內(nèi)在聯(lián)系,由于人類的雙下肢行走有著較為一致的特征,因此為方便實驗開展,本文招募了 16名自愿參加本研究的健康青年(年齡(24.5±0.5)歲 ,身 高 (163.7±2.2)cm ,體 質(zhì) 量(51.3±2.3)kg)作為研究對象.要求受試者下肢健康,排除運動異常和下肢肌肉骨骼疾病的參與者;所有參與者均不是敏感性皮膚,并且在測試前 48h沒有進行劇烈運動.
1.2 實驗環(huán)境與設(shè)備
本實驗中,水平路況的距離為 10m,坡度路況是通過坡度為 15°的步態(tài)實驗平臺完成的,樓梯行走是通過寬度、高度和深度分別為 900mm、180mm 和280mm的定制樓梯來完成的.
本實驗的測試設(shè)備主要由 VICON T40-S 型三維光學(xué)運動捕捉系統(tǒng)(英國 VICON 公司)、AMTIBP400600型三維測力臺(美國AMTI公司)、Telemyo 2400DTS型無線表面肌電遙測儀(美國 Noraxon公司)、步態(tài)行走實驗臺以及隨行保護裝置組成.測力臺尺寸為 464mm×508mm,實驗中設(shè)置其采集頻率為 1000Hz.實驗分析所用軟件采用的是 Telemyo 2400DTS型無線表面肌電遙測儀自帶的分析軟件MyoResearch XP Master Edition,以及SPSS 19.0統(tǒng)計分析軟件,信號數(shù)據(jù)采集頻率設(shè)定為1.5kHz,運用這套分析軟件可以對原始表面肌電信號進行預(yù)處理,其中包括整流和平滑.
1.3 實驗方案
讓受試者充分暴露雙下肢待測肌群,實驗人員去除毛發(fā)之后,用細砂紙打磨以清除皮膚表面角質(zhì),用醫(yī)用酒精棉球充分擦拭局部皮膚脫脂.待酒精揮發(fā)后,貼好一次性心電電極,每塊測試肌肉貼兩個電極片,中心間距為 2cm,與測試肌肉纖維的長軸方向平行;1個參考電極(粘貼前要激活)粘貼在測試電極外側(cè)10cm范圍內(nèi),其與測試電極之間的連線要保持平整,不要扭曲折疊[11-12].待測肌群分別為:左、右股內(nèi)側(cè)肌(LVMO/RVMO),左、右脛骨前肌(LTIB/RTIB),左、右半腱肌(LSEM/RSEM)和左、右腓腸內(nèi)肌(LMED/RMED),如圖 1所示.傳感器放置程序遵循文獻[13]中的標(biāo)準(zhǔn)說明.
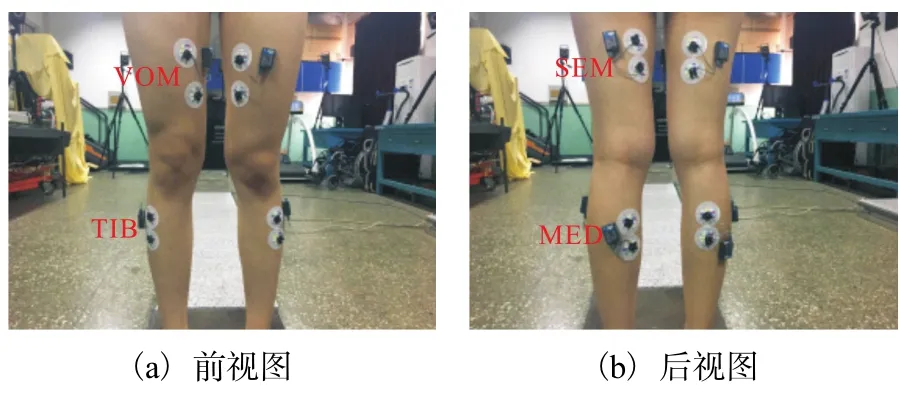
圖1 肌肉的選擇和電極的位置Fig. 1 Selection of muscles and the position of electrodes
在實驗開始前,實驗人員向受試者詳細介紹實驗過程,并在收集任何數(shù)據(jù)之前已征得受試者同意.對VICON系統(tǒng)進行調(diào)試,使表面肌電采集系統(tǒng)和足底壓力采集系統(tǒng)與其同步,并在系統(tǒng)中標(biāo)定和建立實驗環(huán)境,然后讓受試者穿上實驗用標(biāo)準(zhǔn)短褲并連接表面肌電傳感器后開始實驗.實驗過程如下:①所有受試者以自我選擇的速度直接在5個不同的路況(包括平地、上坡、下坡、上樓梯和下樓梯)下行走,路況的順序是隨機的.②每個受試者都以右肢開始行走.③每個受試者在同一種路況中重復(fù)行走7次,在每次行走測試間給受試者提供適當(dāng)?shù)慕M間休息,其中前兩次行走作為適應(yīng)性行走不包括在正式數(shù)據(jù)分析中.
1.4 數(shù)據(jù)處理
本文實驗數(shù)據(jù)的導(dǎo)出及分析按以下步驟進行:
(1)利用 VICON系統(tǒng)自帶軟件對數(shù)據(jù)精確地劃分步態(tài)事件.在VICON系統(tǒng)中對每次實驗運行動態(tài)模板后,VICON系統(tǒng)將自動標(biāo)記出步態(tài)周期中足跟著地、足趾離地等步態(tài)點,根據(jù)標(biāo)記點可得到步態(tài)事件發(fā)生的精確時刻.分析時將跨步時間標(biāo)準(zhǔn)化為步態(tài)周期,即 0%對應(yīng)一側(cè)足首次足跟觸地,100%對應(yīng)同側(cè)足再次足跟觸地.同時,對站立相時間進行標(biāo)準(zhǔn)化,0%代表足跟著地,60%代表足趾離地[14],這樣就可實現(xiàn)不同組別的對比分析.
(2)在MyoResearch XP Master Edition 軟件中導(dǎo)出原始表面肌電圖,表面肌電信號測試系統(tǒng)與VICON動作捕捉系統(tǒng)配套使用可以同步 VICON系統(tǒng)中劃分好的步態(tài)周期以及步態(tài)事件.
(3)在MyoResearch XP Master Edition 軟件中對實驗過程中采集到的原始表面肌電信號進行頻譜/疲勞(Frequency/Fatigue)分析,導(dǎo)出各頻域參數(shù)(平均頻率和中位頻率),頻譜/疲勞報告分析按每 1s為一節(jié)段進行標(biāo)記分析.
(4)在MyoResearch XP Master Edition 軟件中對原始表面肌電信號進行預(yù)處理(Signal Processing).預(yù)處理包括全波整流(Rectification)和平滑(Smoothing),平滑采用移動平均(Mean)計算,時間窗設(shè)置為 50ms,然后對處理過的表面肌電信號進行標(biāo)準(zhǔn)振幅(Standard Amplitude)分析,導(dǎo)出各時域參數(shù)(平均肌電振幅和肌電積分值).標(biāo)準(zhǔn)振幅報告分析取每次步行數(shù)據(jù)中左腓腸內(nèi)肌中間的 5次肌肉活動,以每次活動為一節(jié)段進行手動打標(biāo)(Marker).
(5)應(yīng)用SPSS 19.0統(tǒng)計分析軟件對不同路況下各受試肌群的各參數(shù)進行單因素方差分析,檢驗各肌群表面肌電各參數(shù)在各路況下的變化情況,顯著性檢驗標(biāo)準(zhǔn)為 P<0.05[15].*表示 P<0.05為顯著性差異,**表示P<0.01為極顯著性差異,均有統(tǒng)計學(xué)意義.
2 結(jié)果與分析
2.1 不同路況下人體下肢肌群特征參數(shù)分析結(jié)果
本研究對受試者在不同路況下行走時 4組肌群的表面肌電信號特征參數(shù)的平均值、標(biāo)準(zhǔn)差進行整理分析,見表 1—表 4.其中:路況 LG表示水平地面、路況UH表示上坡、路況DH表示下坡、路況 US表示上樓梯、路況DS表示下樓梯;AMP表示肌電振幅(μV)、IEMG 表示肌電積分(μV·s)、MPF 表示平均頻率(Hz)、MF表示中位頻率(Hz).

表1 16名受試者不同路況下行走時各肌群肌電振幅Tab.1 AMP of all muscles of 16 subjects on different terrains

表2 16名受試者不同路況下行走時各肌群肌電積分Tab. 2 IEMG of all muscles of 16 subjects on different terrains

表3 16名受試者不同路況下行走時各肌群平均頻率Tab. 3 MPF of all muscles of 16 subjects on different terrains

表4 16名受試者不同路況下行走時各肌群中位頻率Tab. 4 MF of all muscles of 16 subjects walking under different road conditions
由表 1—表 4可知:對于 VMO,平地、上下坡時的 AMP左右下肢有極顯著性差異,表現(xiàn)為雙側(cè)VMO的 AMP優(yōu)勢側(cè)的均值小于非優(yōu)勢側(cè)(由平均值可判斷,以下同);對于 SEM,下坡、上下樓時AMP左右下肢有顯著性差異,表現(xiàn)為雙側(cè) SEM 的AMP優(yōu)勢側(cè)的均值小于非優(yōu)勢側(cè),在上下樓時差異更顯著;對于 MED,平地、上下坡及上樓時 AMP左右下肢有顯著性差異,表現(xiàn)為雙側(cè)腓腸內(nèi)肌的 AMP優(yōu)勢側(cè)的均值小于非優(yōu)勢側(cè),在平地、下坡時差異更顯著.雙下肢各肌群在各路況下的 IEMG左右側(cè)對比分析結(jié)果與各路況下 AMP左右側(cè)對比分析結(jié)果基本一致,只是在個別路況下稍有差別,如上樓時雙側(cè) TIB的 IEMG值左右下肢有顯著性差異,表現(xiàn)為雙側(cè) TIB的 IEMG值優(yōu)勢側(cè)的均值小于非優(yōu)勢側(cè),上樓時雙側(cè)SEM的IEMG值左右下肢無差異.
對于 VMO,下樓時 MPF值左右下肢有顯著性差異,表現(xiàn)為雙側(cè) VMO的 MPF優(yōu)勢側(cè)的均值小于非優(yōu)勢側(cè);對于TIB,平地時MPF左右下肢有極顯著性差異,表現(xiàn)為雙側(cè)TIB的MPF優(yōu)勢側(cè)的均值小于非優(yōu)勢側(cè);對于 MED,上坡、下樓時 MPF左右下肢有顯著性差異,表現(xiàn)為雙側(cè) MED的 MPF優(yōu)勢側(cè)的均值小于非優(yōu)勢側(cè).平地、下坡、上下樓時 TIB左右下肢的MF有顯著性差異,表現(xiàn)為雙側(cè)TIB的MF優(yōu)勢側(cè)的均值小于非優(yōu)勢側(cè);平地時MED的MF左右下肢有顯著性差異,表現(xiàn)為優(yōu)勢側(cè)的MF小于非優(yōu)勢側(cè)的中位頻率.
此外,受試者雙下肢4個肌群的表面肌電信號特征參數(shù)在不同路況中的變化表現(xiàn)不同,并且在不同路況下行走時,同一肌群的做功量不同.在不同路況下行走時,同一組肌群的 AMP、EMG、MPF和 MF等特征值會隨之發(fā)生變化.對于右下肢,在上坡行走期間,SEM和MED的AMP和IEMG與在水平地面行走時相比顯著增加;在上樓行走期間,VMO的 AMP和 IEMG與在水平地面行走時相比顯著增加.對于左下肢,在上坡行走期間,VMO,SEM 和 MED 的AMP和 IEMG與水平地面行走時相比顯著增加.在上樓行走期間,VMO和SEM的AMP和IEMG與在水平地面行走時相比顯著增加.
綜上可知,AMP和IEMG比MPF和MF更能夠反映不同路況行走時所有肌群的變化情況.此外,AMP和 IEMG的變化相似,但 AMP可以更全面地反映不同路況行走中所有肌群的變化情況.
2.2 不同路況下人體下肢關(guān)節(jié)肌肉力分析結(jié)果
平地時各受試肌群一個步態(tài)周期內(nèi)的 AMP變化如圖 2所示.各受試肌表面肌電信號在支撐期(一個完整步態(tài)周期的0~60%)均表現(xiàn)活躍.
支撐期主要是支撐身體、保持平衡及提供行走動力的過程.足跟著地時,外力的作用是使髖、膝關(guān)節(jié)屈曲,因此SEM和VMO此時均強烈收縮,使髖、膝伸展,防止屈曲,防止跌倒,從而維持身體前后方向的穩(wěn)定;而此時外力對踝關(guān)節(jié)的作用是使其跖屈,為使踝關(guān)節(jié)的跖屈運動得到控制,TIB收縮,對抗外力使踝背屈,以使全足平穩(wěn)著地.支撐中期(一個完整步態(tài)周期的 15%~45%)、末期(一個完整步態(tài)周期的45%~60%),MED 強烈收縮,使足跖屈運動,產(chǎn)生前進的推力,使人向前邁步.擺動末期(一個完整步態(tài)周期的90%~100%)SEM肌電出現(xiàn)一個較大的峰值,由于擺腿階段要將觀測腿抬離地面,主要完成的是膝關(guān)節(jié)的屈曲,因此,其主要收縮肌肉SEM興奮.

圖2 平地時各受試肌群一個步態(tài)周期內(nèi)的肌電振幅變化Fig. 2 AMP changes of all muscles in one gait cycle during level walking
上坡時各受試肌群一個步態(tài)周期內(nèi)的 AMP變化如圖 3所示.上坡時各受試肌群在一個步態(tài)周期上的 AMP變化與平地變化趨勢類似,但由于上坡時要克服重力做功,肌電振幅普遍比平地時要大.

圖3 上坡時各受試肌群一個步態(tài)周期內(nèi)的肌電振幅變化Fig. 3 AMP changes of all muscles in one gait cycle going up-slope
下坡時各受試肌群一個步態(tài)周期內(nèi)的 AMP變化如圖 4所示.下坡時,VMO、TIB、MED 在支撐期均有一定的活動,SEM 基本不活動;擺動末期,VMO、TIB、SEM均出現(xiàn)一個活動高峰;MED在擺動期基本不活動.

圖4 下坡時各受試肌群一個步態(tài)周期內(nèi)的肌電振幅變化Fig. 4 AMP changes of all muscles in one gait cycle going down-slope
上樓時各受試肌群一個步態(tài)周期內(nèi)的 AMP變化如圖 5所示.各受試肌表面肌電在一個步態(tài)周期內(nèi)的變化規(guī)律與平地時類似.支撐期觀測腿負責(zé)完成向上提升身體的任務(wù),在其足跟著地時,VMO和SEM強烈收縮,使髖、膝伸展;TIB強烈收縮,使踝關(guān)節(jié)的跖屈運動得到控制.支撐中、末期,MED強烈收縮,使足跖屈.由于該過程需要克服重力做功,上述肌肉的興奮時間和興奮程度均大于平地行走時支撐階段各肌群的表現(xiàn).擺動前期(一個完整步態(tài)周期的60%~70%)、末期 SEM 的肌電均出現(xiàn)了一個較大的峰值,這可能是由于上樓時腿部抬高高度比平地時大.

圖5 上樓時各受試肌群一個步態(tài)周期內(nèi)的肌電振幅變化Fig. 5 AMP changes of all muscles in one gait cycle going upstairs
下樓時各受試肌群一個步態(tài)周期內(nèi)的 AMP變化如圖6所示.

圖6 下樓時各受試肌群一個步態(tài)周期內(nèi)的肌電振幅變化Fig. 6 AMP changes of all muscles in one gait cycle going downstairs
下樓時,VMO在支撐中、末期有一個較大的峰值,其他時刻均為靜止?fàn)顟B(tài);SEM在支撐末期有一定的活動,在擺動中期(一個完整步態(tài)周期的 70%~90%)出現(xiàn)一個較大的峰值;MED在整個步態(tài)周期內(nèi)均有活動,在支撐前期(一個完整步態(tài)周期的 0~15%)活動最大.支撐期踝關(guān)節(jié)做跖屈運動,MED 對其作用力增強,因此在支撐期一直處于活躍狀態(tài);其他兩個關(guān)節(jié)在支撐前期基本沒有活動,在支撐中、末期主要做屈曲動作,VMO、SEM 因此活動活躍.TIB在擺動前期有一個較大的峰值,其他時刻均為靜止?fàn)顟B(tài).
3 討 論
本研究表明健康青年人的左右下肢存在優(yōu)勢側(cè)和非優(yōu)勢側(cè),與李青青等[14]在對正常人平地行走(10m)時小腿前側(cè)肌群 TIB、后側(cè)肌群 MED的表面肌電信號的研究中得出的結(jié)論一致.造成健康青年人左右下肢之間的AMP和IEMG存在差異的原因,可能是中國大多數(shù)健康成年人右側(cè)肢體為優(yōu)勢側(cè),在完成功耗相等的步行運動時,優(yōu)勢側(cè)只需要募集較少的運動單位,運動單位數(shù)量少,則放電小,導(dǎo)致平均肌電振幅、肌電積分小;但是,對于同一肌肉、不同路況條件下所得出的對比分析結(jié)果不一致,這可能是因為在完成某一動作時雙下肢肌群均需要募集較多的運動單位,而將本身存在的差異性掩蓋了.
本研究還表明,雙下肢同一肌群的肌電信號特征參數(shù)在不同的路況下有所不同.在不同路況下行走時,同一肌群的 MPF和 MF的變化可能是由于慢肌纖維(STF)和快肌纖維(FTF)比例的變化造成的.當(dāng)完成一個動作時,STF比例的增加和 FTF比例的減小會導(dǎo)致MPF和MF的減小,相反STF比例的減小和FTF比例的增加將導(dǎo)致MPF和MF的增大.在完成上坡和上樓行走時與在平地行走時相比,人體需要克服重力做功,此時參加工作的運動單位的數(shù)量增多、放電量增加,導(dǎo)致特征參數(shù)的增加,人體在上坡時大腿及小腿后側(cè)肌群克服重力做功明顯,上樓時大腿肌群克服重力做功明顯,因此 AMP和 IEMG增加.此外,上坡時大腿和小腿后肌群明顯地做功克服了重力,導(dǎo)致SEM和MED的AMP和IEMG與平地行走時相比顯著增加.在上樓梯時,大腿前肌群為克服重力做功明顯,導(dǎo)致VMO的AMP和IEMG與水平地面行走時相比顯著增加.下坡及下樓時VMO和TIB的 AMP和 IEMG較平地行走時顯著減小,上坡、下坡、上樓及下樓的特征參數(shù)均有明顯區(qū)別.
根據(jù)本研究結(jié)論提出的下肢輔助系統(tǒng)控制策略如下:
平地行走時,在支撐前期主要是髖關(guān)節(jié)、膝關(guān)節(jié)的伸展,以及踝關(guān)節(jié)的背屈,對應(yīng)人體 SEM、VMO、TIB的活動增強,因此在系統(tǒng)的控制系統(tǒng)設(shè)計時,在其步態(tài)周期 0~15%的時間上述三處肌群對應(yīng)人體解剖學(xué)的位置施加控制力,以確保系統(tǒng)前后方向的穩(wěn)定以及使其足平穩(wěn)著地:在大腿后內(nèi)側(cè)的位置施加驅(qū)動力以驅(qū)動髖關(guān)節(jié)伸展;在大腿前內(nèi)側(cè)的位置施加驅(qū)動力以驅(qū)動膝關(guān)節(jié)伸展;在小腿前外側(cè)的位置施加驅(qū)動力以驅(qū)動踝關(guān)節(jié)背屈.支撐中末期,主要是踝關(guān)節(jié)的跖屈運動,對應(yīng)人體 MED的強烈收縮,因此在系統(tǒng)的控制系統(tǒng)設(shè)計時,在其步態(tài)周期 15%~60%的時間應(yīng)該在腓腸內(nèi)肌對應(yīng)人體解剖學(xué)的位置施加控制力,以產(chǎn)生前進的推力,使其向前邁步:在小腿后內(nèi)側(cè)的位置施加驅(qū)動力以驅(qū)動踝關(guān)節(jié)跖屈.擺動期主要動作是膝關(guān)節(jié)的屈曲,對應(yīng) SEM 肌電活動活躍,因此在系統(tǒng)的控制系統(tǒng)設(shè)計時,在其步態(tài)周期 60%~100%的時間應(yīng)該在 SEM 對應(yīng)人體解剖學(xué)的位置施加控制力,以使其擺動腿抬離地面:在大腿后內(nèi)側(cè)的位置施加驅(qū)動力以驅(qū)動膝關(guān)節(jié)屈曲.
上坡時,與平地控制策略類似,但由于上坡時要克服重力做功,上坡時的驅(qū)動力應(yīng)該比平地時要大.在其步態(tài)周期 0~15%的時間(支撐前期)SEM、VMO、TIB三處肌群對應(yīng)人體解剖學(xué)的位置施加控制力,以確保系統(tǒng)前后方向的穩(wěn)定以及使其足平穩(wěn)著地:在大腿后內(nèi)側(cè)的位置施加驅(qū)動力以驅(qū)動髖關(guān)節(jié)伸展;在大腿前內(nèi)側(cè)的位置施加驅(qū)動力以驅(qū)動膝關(guān)節(jié)伸展;在小腿前外側(cè)的位置施加驅(qū)動力以驅(qū)動踝關(guān)節(jié)背屈;在其步態(tài)周期 15%~60%的時間(支撐中、末期)MED對應(yīng)人體解剖學(xué)的位置施加控制力,以產(chǎn)生前進的推力,使其向前邁步:在小腿后內(nèi)側(cè)的位置施加驅(qū)動力以驅(qū)動踝關(guān)節(jié)跖屈.在其步態(tài)周期 60%~100%的時間(擺動期)SEM對應(yīng)人體解剖學(xué)的位置施加控制力,以使其擺動腿抬離地面:在大腿后內(nèi)側(cè)的位置施加驅(qū)動力以驅(qū)動膝關(guān)節(jié)屈曲.
下坡時,在其步態(tài)周期 0~15%的時間(支撐前期),膝關(guān)節(jié)一直處于屈曲狀態(tài),踝關(guān)節(jié)一直處于跖屈狀態(tài),導(dǎo)致 MED表面肌電活躍,因此在系統(tǒng)控制設(shè)計時應(yīng)該在此處肌群對應(yīng)人體解剖學(xué)的位置施加控制力,以確保系統(tǒng)前后方向的穩(wěn)定以及使其足平穩(wěn)著地:在小腿后內(nèi)側(cè)的位置施加驅(qū)動力以驅(qū)動踝關(guān)節(jié)跖屈;在其步態(tài)周期 15%~60%的時間(支撐中、末期)VMO、TIB對應(yīng)人體解剖學(xué)的位置施加控制力,以產(chǎn)生前進的推力,使其向前邁步:在大腿前內(nèi)側(cè)的位置施加驅(qū)動力以驅(qū)動踝關(guān)節(jié)伸展;在小腿前內(nèi)側(cè)的位置施加驅(qū)動力以驅(qū)動踝關(guān)節(jié)背屈.在其步態(tài)周期60%~100%的時間(擺動期)SEM 對應(yīng)人體解剖學(xué)的位置施加控制力,以使其擺動腿抬離地面:在大腿后內(nèi)側(cè)的位置施加驅(qū)動力以驅(qū)動膝關(guān)節(jié)屈曲.
上樓時,在其步態(tài)周期 0~15%的時間(支撐前期)SEM、VMO、TIB三處肌群對應(yīng)人體解剖學(xué)的位置施加控制力,以確保系統(tǒng)前后方向的穩(wěn)定以及使其足平穩(wěn)著地:在大腿后內(nèi)側(cè)的位置施加驅(qū)動力以驅(qū)動髖關(guān)節(jié)伸展;在大腿前內(nèi)側(cè)的位置施加驅(qū)動力以驅(qū)動膝關(guān)節(jié)伸展;在小腿前外側(cè)的位置的位置施加驅(qū)動力以驅(qū)動踝關(guān)節(jié)背屈.在其步態(tài)周期 15%~60%的時間(支撐中、末期),對應(yīng)人體MED強烈收縮,因此在系統(tǒng)的控制系統(tǒng)設(shè)計時,應(yīng)該在 MED對應(yīng)人體解剖學(xué)的位置施加控制力,以產(chǎn)生前進的推力,使其向上邁步并使身體重心向上移動:在小腿后內(nèi)側(cè)的位置施加驅(qū)動力以驅(qū)動踝關(guān)節(jié)跖屈.在其步態(tài)周期 60%~100%的時間(擺動期),主要動作是膝關(guān)節(jié)的屈曲以及踝關(guān)節(jié)的背屈,對應(yīng) SEM、TIB肌電活動活躍,因此在系統(tǒng)的控制系統(tǒng)設(shè)計時,在其步態(tài)周期 60%~100%的時間應(yīng)該在上述兩處肌群對應(yīng)人體解剖學(xué)的位置施加控制力,以使其擺動腿向上接觸目標(biāo)臺階:在大腿后內(nèi)側(cè)的位置施加驅(qū)動力以驅(qū)動膝關(guān)節(jié)屈曲;在小腿前內(nèi)側(cè)的位置施加驅(qū)動力以驅(qū)動踝關(guān)節(jié)背屈.
下樓時,在其步態(tài)周期 0~15%的時間(支撐前期)MED對應(yīng)人體解剖學(xué)的位置施加控制力,以確保系統(tǒng)前后方向的穩(wěn)定以及使其足平穩(wěn)著地:在小腿后內(nèi)側(cè)的位置施加驅(qū)動力以驅(qū)動踝關(guān)節(jié)跖屈.在其步態(tài)周期 15%~60%的時間(支撐中、末期),對應(yīng)人體VMO強烈收縮,因此在系統(tǒng)的控制系統(tǒng)設(shè)計時,應(yīng)該在VMO對應(yīng)人體解剖學(xué)的位置施加控制力,以產(chǎn)生前進的推力,使其向下邁步并使身體重心向下移動:在大腿前內(nèi)側(cè)的位置施加驅(qū)動力以驅(qū)動膝關(guān)節(jié)伸展.在其步態(tài)周期 60%~100%的時間(擺動期),主要動作是膝關(guān)節(jié)的屈曲以及踝關(guān)節(jié)的背屈,對應(yīng)SEM、TIB肌電活動活躍,因此在系統(tǒng)的控制系統(tǒng)設(shè)計時,在其步態(tài)周期 60%~100%的時間應(yīng)該在上述兩處肌群對應(yīng)人體解剖學(xué)的位置施加控制力,以使其擺動腿向下接觸目標(biāo)臺階:在大腿后內(nèi)側(cè)的位置施加驅(qū)動力以驅(qū)動膝關(guān)節(jié)屈曲;在小腿前內(nèi)側(cè)的位置施加驅(qū)動力以驅(qū)動踝關(guān)節(jié)背屈.
4 結(jié) 語
本文對健康青年受試者在不同路況下行走時 4組主要肌群(VMO、TIB、SEM、MED)的表面肌電信號變化情況進行了測試和記錄,并運用統(tǒng)計學(xué)方法對各肌肉群表面肌電信號的特征參數(shù)進行分析,結(jié)果表明:健康青年人的左右下肢存在優(yōu)勢側(cè)和非優(yōu)勢側(cè),平地行走及上下坡時,RVMO的AMP、IEMG小于左側(cè);平地行走、下坡及上下樓梯時,RTIB的MPF、MF小于左側(cè);下坡及上下樓時,RSEM 的 AMP、IEMG小于左側(cè);平地、上下坡及上樓時,RMED 的 AMP、IEMG 小于左側(cè),平地、上坡及下樓時,其 MPF、MF小于左側(cè).雙下肢同一肌群的肌電信號特征參數(shù)在不同的路況下有所不同,雙側(cè)受試肌群在不同路況下的 AMP和 IEMG變化規(guī)律具有相似性,AMP較IEMG能更全面地反映肌群各路況下的變化情況.MPF和 MF沒有較多的變化,MF較 MPF能更全面地反映肌群各路況下的變化情況,不同路況下的特征參數(shù)區(qū)分明顯:人體在上坡時大小腿后側(cè)肌群克服重力做功明顯,上樓時大腿前側(cè)肌群克服重力做功明顯,上坡、下坡、上樓及下樓的特征參數(shù)之間均有明顯區(qū)別.
由于肌電信號可以控制肌肉的收縮,且收縮力的大小與參與運動單位的數(shù)量和每個運動單位的神經(jīng)沖動的接收頻率有關(guān),因此可以根據(jù)各路況下主要肌群的表面肌電信號特征值的區(qū)別,將某一路況同其他路況區(qū)別開來,為下肢智能動作輔助系統(tǒng)的設(shè)計策略以及雙足機器人/智能助行器的優(yōu)化設(shè)計提供參考.