基于人工勢場與紅外檢測的機器人路徑規劃
2020-10-21 04:14:06周松林
銅陵學院學報 2020年2期
王 超 周松林
(銅陵學院,安徽 銅陵 244061)
一、引言
路徑規劃與避障技術是近年來發展較為迅速的一門學科,尤其是在移動機器人[1]領域。如果僅僅為了到達目標,到達作業效果,傳統的人工勢場算法基本能實現[2-3]。但現有的移動機器人路徑規劃技術還存在不足,為了提高機器人的自主性和智能性[4-6],針對復雜的動態環境,各種特殊的障礙物有它一定的不確定因素,很容易讓機器人陷入平行移動或靜止等待等情況[7-8]。
紅外檢測技術有著自身的特地優點,例如,能耗小、安裝方便、反應迅速、便于控制等。可以應用在很多領域,尤其是在避障技術方面,發揮著至關重要的作用。但由于自身的局限性,對于有目標的作業,和未知的環境中,就無法預先知道障礙的運行情況和距離范圍,很難發揮它的自主性和智能性。
因此,針對移動機器人的自身特性,結合復雜環境作業等特點,如何快速、準確地找到一條最優路徑成為研究問題的關鍵。
二、人工勢場與紅外檢測路徑規劃算法
下面首先對人工勢場算法進行介紹,然后針對動態環境的特殊性,加入紅外檢測技術,從而在路徑選擇中達到較為穩定的效果。
(一)人工勢場算法
人工勢場法[9-10]廣泛應用于路徑規劃和避障技術中,通過構建一種虛擬力法來處理復雜的環境,特別是未知的環境狀態下,更能很好解決問題。它的基本思想是在目標點設計一種抽象的引力場Uatt和在障礙物周圍設計一種抽象的斥力場Urep,最后通過求引力場的引力Fatt和斥力場的斥力Frep來控制機器人的運動。
1.引力場建模
由于移動機器人作業的目標點固定,可借用陸地移動機器人的引力勢場設計方法[11-14]。設二維空間S 中有一靜止機器人 r(x1,y1)和目標點 g(x2,y2),如圖1所示。定義S空間內機器人與目標物距離函數為:

其產生的引力場為:

目標吸引力為:

其中nRG是機器人到目標的單位矢量。
2.斥力場建模
圖2給出移動機器人所受斥力場的受力情況,障礙物位置是 o(x3,y3)。
這里給出斥力勢場的距離分量表達式:

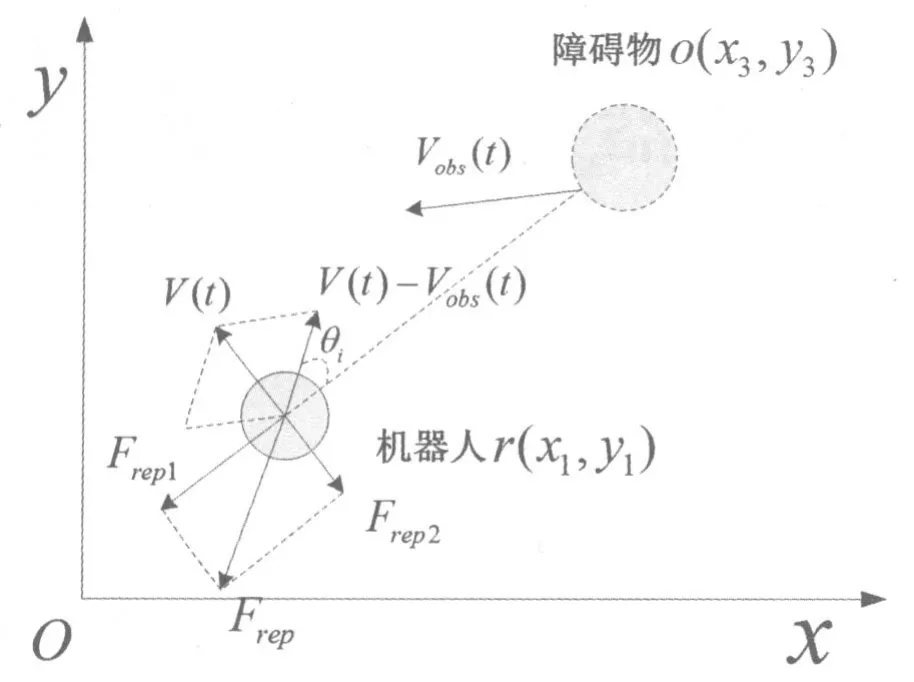
圖1 二維空間S中的引力
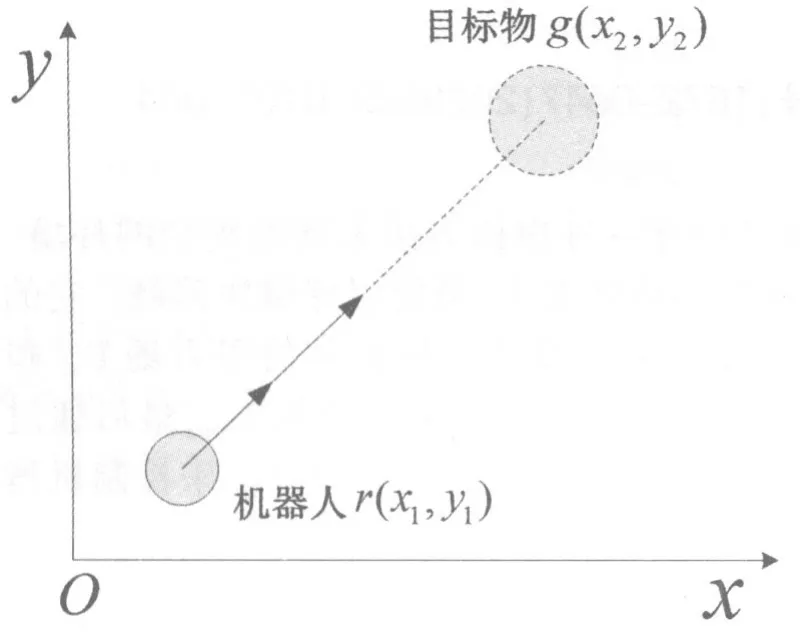
圖2 二維空間S中的斥力
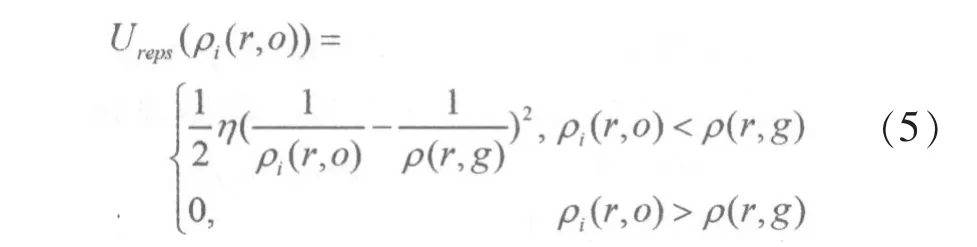
第i個障礙物的距離分量產生的斥力場所對應排斥力為:

則對應的總的排斥力為:

那么,總的斥力場函數為:

其中,
第i個障礙物的速度分量產生的勢場如式(9)表示,相應的勢場力如式(10)、(11)所示:
其中 θi表示相對速度 V(t)-Vobs(t)與距離斥力分量Frep1的夾角,λ是常數系數。
(二)紅外檢測技術
在很多實際環境中,對于存在動態障礙物的情況,如果機器人在運動過程中不能快速做出避障動作,可能會陷入平行移動狀態,如圖3所示。導致與目標越來越遠,因此移動機器人將不可能到達目標。如何快速避開近距離障礙物成了關鍵性的因素。
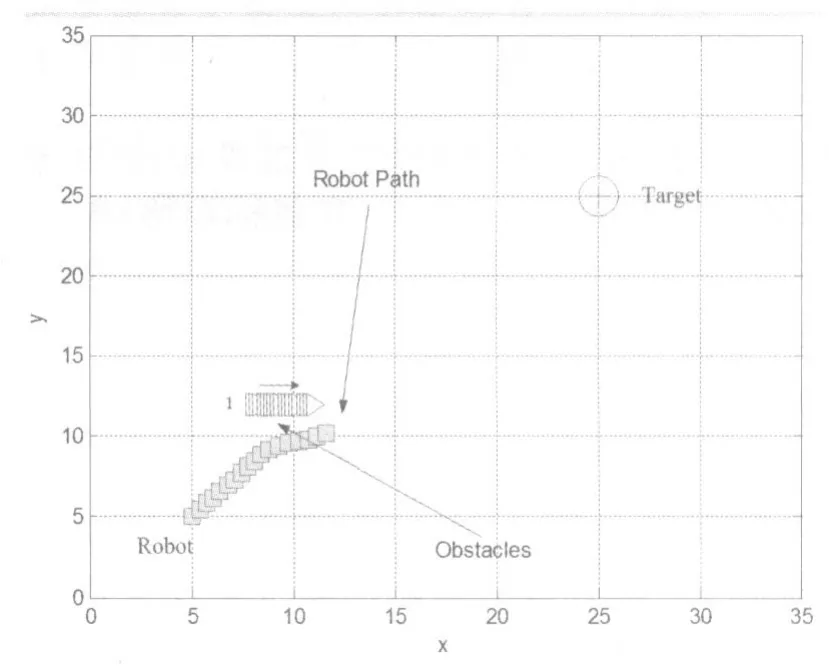
圖3 機器人陷入平行移動狀態
紅外避障模塊實物圖如圖4所示,具有能耗小、便于安裝、易于控制等特點,在機器人避障、紅外線計數等眾多領域有著廣泛的應用[15]。該模塊發射管和接收管兩部分組成,發射管發射一定頻率的紅外線,當檢測方向遇到障礙物時 (可以預先設定檢測距離范圍10~50cm),紅外線返回被接收管接收,經過一定的計算機處理和電路處理程序后,輸出一個數字信號,讓機器人做出相應的避障動作。
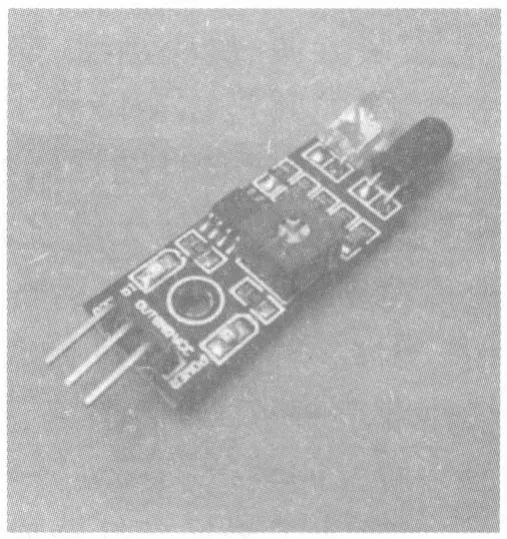
圖4 紅外避障模塊
為了增加避障動作的快速準確,可以采用多個發射源共同工作,不同的發射源頻率不一樣,例如,50Hz,60Hz……,接收管根據頻率的不同判斷障礙物的方向,當機器人與障礙物的距離超過預先設定的范圍,則繼續進入人工勢場的路徑規劃。
三、仿真結果
動態環境存在多種復雜情況,為了達到良好的仿真效果,本章節將動態環境分為障礙物運動、目標靜止和障礙物靜止、目標運動兩種特殊情況。下面主要討論障礙物運動、目標靜止這種常見的動態環境。設定機器人的移動速度V(t)大小為0.10m/s。
其中m,n是正常數,其取值決定了勢場函數曲線的形狀。如果m=1,會使求導后出現引力無界情況,造成機器人在目標點抖動[12],在仿真試驗中,取m=n=2,其余參數的取值在[0.1,10]內調節,能達到良好的實驗效果。 對于引力場,取 α=5.5,β=0.5,;對于斥力場,取α=1,γ=2。以綠色小方塊代表機器人,藍色三角形代表障礙物,移動機器人的開始坐標為[5,5],目標點的坐標為[25,25]。在機器人和目標點之間設置了3個不同方向勻速運動的障礙物:障礙物l的位置坐標為[8,12],從t=0s時刻開始自左向右水平方向運動,速度為 0.04m/s;障礙物 2 的位置坐標為[16,18],從 t=90s時刻開始自上而下豎直方向運動,速度為0.05m/s;第三個障礙物的坐標為[22,18],從t=180s時刻開始斜向左上方45°方向運動,移動速度為0.06m/s。
由圖5可知,在勢場力的作用下,機器人在運動的過程有向右避開障礙物的趨勢,但由于障礙物的相對移動情況,讓機器人陷入平行移動,這時紅外避障模塊進行快速處理,使得機器人成功的向右避開了障礙物1,圖6中,機器人分別避開障礙物2和3,機器人避障運動的完整路徑見圖7。
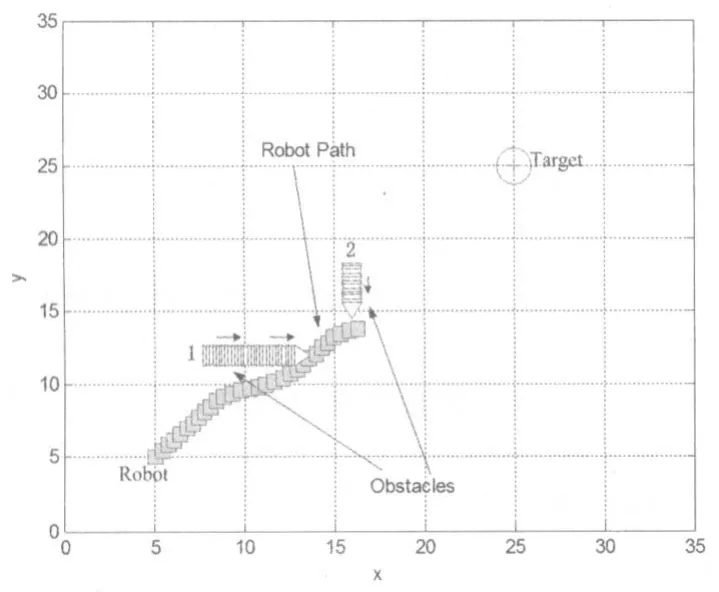
圖5機器人運動路徑
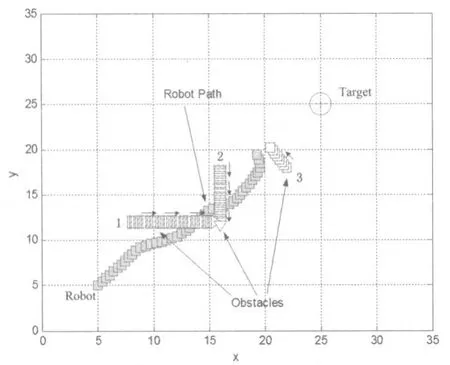
圖6 機器人運動路徑
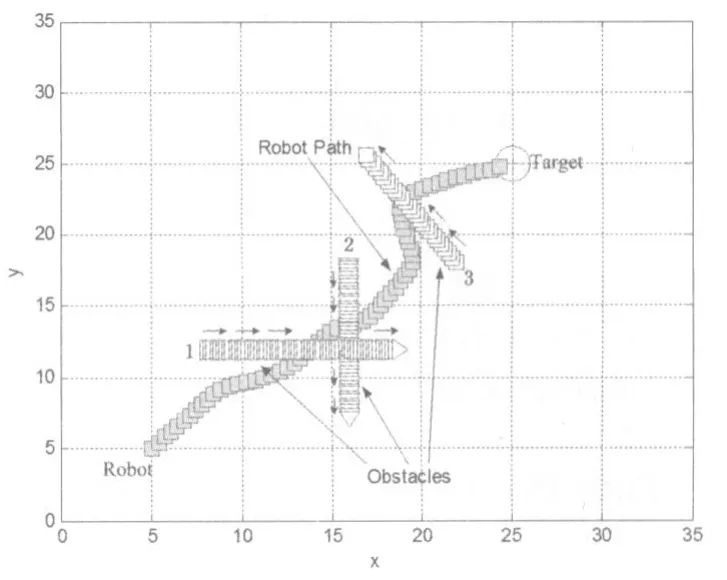
圖7 機器人運動路徑
由仿真結果可見,本文算法通過設定多個動態障礙物來模擬未知的環境,最終機器人成功的避開移動中的障礙物,而且消除了平行移動等問題,找到了一條最優的運動路徑,大大提高了作業效率。
四、結語
對于常見的動態障礙物情況,本文在傳統的人工勢場路徑規劃算法的基礎上,將紅外檢測技術應用其中,有效的解決的機器人在運動過程中容易出現的平行移動情況,大大減少了移動機器人的運動路徑,達到了最優的規劃效果。
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
制造技術與機床(2017年3期)2017-06-23 08:11:21
智能系統學報(2015年4期)2015-12-27 09:38:35