光纖陀螺用于橋梁線形檢測精度提高方法研究*
2020-10-23 07:19:58甘維兵
交通科技 2020年5期
蘇 州 林 杰 甘維兵
(1.湖北交投智能檢測股份有限公司 武漢 430070; 2.武漢理工大學光纖傳感技術國家工程實驗室 武漢 430070)
隨著各種跨徑龐大、結構新穎、體系復雜的大型橋梁不斷涌現,橋梁結構健康監測受到越來越廣泛關注。在諸多影響橋梁結構健康因素中,線形是評價橋梁安全狀態的一項重要指標[1]。隨著橋梁健康監測技術的發展,涌現出了許多線形測量方法[2],常用的方法主要有百分表、全站儀、精密水準儀、連通管、差分GPS、測量機器人、激光圖像測量法等[3-7],其中最具有代表性的測量方法包括水準儀、連通管、測量機器人和三維激光掃描。水準儀測量精度高、點位密,但耗時長、工作量大;連通管測量精度高、易實現自動化、點位密,但安裝和維護成本較高;測量機器人操作簡單、測量精度高,但測點稀疏;三維激光掃描是一種非接觸式測量方法,具有自動化、高精度、高效等特點,但受地形條件限制,其掃描范圍有限,易受橋塔遮擋的影響[8]。
綜上所述,現有測量方法存在檢測周期長、實施成本高、易受環境影響、測量點不連續等不足,容易遺漏結構存在的潛在病害處。為此,王立新等[9-10]于2002年就提出將光纖陀螺用于工程結構形變測量,該方法具有快速、連續、測量精度較高等特點。然而,受外界環境影響,其檢測精度很難滿足工程測量需求。鑒于檢測小車在實際測量過程中可能因橋面的不平整、伸縮縫、減速帶等產生振動沖擊,給檢測系統帶來外界噪聲干擾,導致檢測精度降低。本文提出采用小波分析、經驗模態分解(EMD)和獨立成分分析(ICA)混合信號處理方法對外界振動引起的噪聲進行提取、濾波和重構,達到提高系統檢測精度的目的。該方法應用于大跨度新建橋梁荷載試驗數據分析中,其檢測精度改善明顯,效果良好,滿足工程測量需求。
1 光纖連續線形檢測基本原理
通過光纖陀螺精確測量載體運動時相對慣性空間的轉動角速度沿運載體坐標系分量,結合運載體高精度里程儀輸出信息,采用捷聯矩陣及積分運算方法即可推導出載體運動的軌跡[11-12],光纖陀螺隨載體運動的軌跡即代替待測結構連續線形,其檢測原理見圖1。

圖1 光纖陀螺用于連續線形檢測原理
假設運載體從i點運動到i+1點,根據積分極限相似理論,當其運行時間間隔t極限小時,第i+1點的坐標(Xi+1,Yi+1)可以近似表示為
(1)
(2)
式中:運載體的線速度為vi+1;角速度為ωi+1;運載體與結構表面的初始夾角為θi;Xi+1代表橋梁里程;Yi+1為橋梁高程。假設運載體前后輪間距L相對于待測橋梁的長度是可以忽略不計的,可將運載體視為一個質點,根據式(1)和(2)建立的遞推函數關系,即可開展運載體沿待測結構表面運行時連續軌跡的計算,質點運行的軌跡即為待測橋梁結構表面連續線形。
2 基于EMD和ICA信號處理方法
2.1 路面沖擊噪聲特性分析
頻域分析方法是研究控制系統的一種經典方法,將傳遞函數從復域引到頻域,利用頻率特性作為數學模型來進行研究。本文采用快速傅里葉變換(FFT)對外界振動影響情況下的角速度值進行處理,通過相關、包絡和頻譜分析,更加直觀地了解各種噪聲對光纖陀螺輸出產生的影響。
對于一個非周期振動函數y(t),可以用FFT表示為

(3)
用頻率表示為
(4)
其中:Y(ω)為角速度函數;Y(f)為頻域函數;ω、f分別為外界振動源的角速度和頻率,ω=2πf;t為振動時間。
使用FFT分別對路面平整和不平整時的光纖陀螺輸出信號進行頻譜分析,其結果見圖2。
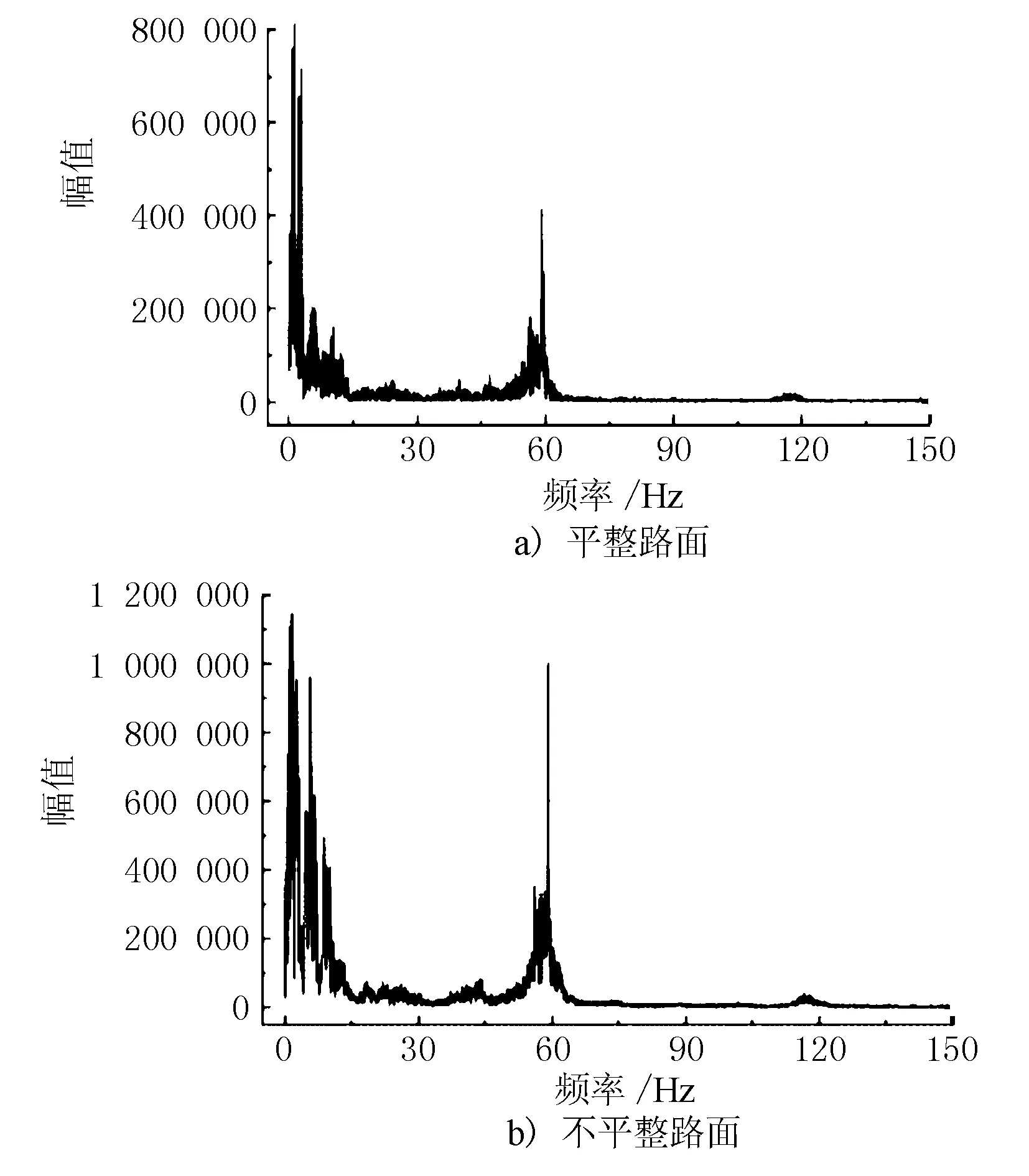
圖2 光纖陀螺角速度頻譜特性
由圖2可見,頻譜特性能夠更好地觀察到測量過程中光纖陀螺受到的影響因素,路面不平整帶來的沖擊對數據的多個頻率段都造成了影響。在對線形檢測數據進行分析時,需要對光纖陀螺的頻譜特性進行深入討論,從而挖掘數據中包含的諸多信息,為數據處理提供合理依據。
2.2 路面沖擊噪聲識別與定位
先利用小波變換方法進行甄別,再有針對性地進行單獨分析和處理,確保檢測數據的準確性和完整性,同時有效地提取出噪聲信號。利用小波變換方法將光纖陀螺在不平整路面時的角速度值進行7層分解,其結果見圖3。

圖3 光纖陀螺角速度值小波變換分解結果
由圖3可見,經過小波變換后,在分解的d1到d5層上均出現了小波變換極大值現象,故可以認為該時刻(虛線框部分)的數據為沖擊噪聲引起,與實驗情況吻合。因此認為小波變換能夠準確地識別和定位路面不平整處。
2.3 基于EMD和ICA路面沖擊噪聲處理
首先,采用EMD對數據進行處理,使得原始信號被分解成若干個包含從高頻分量到低頻分量的本征模態函數(IMF);然后,利用ICA盲源分離方法對多個IMF進行二次處理。小波變換方法可將光纖陀螺角速度數據中的奇異值篩選出來,再利用EMD和ICA復合噪聲處理方法對篩選出來的奇異值進行處理,將處理后的數據回填到濾波后的空白數據中,確保線形準確性和完整性。
采用EMD和ICA相結合的方法對某一段線形數據進行深度處理,實現干擾信號的位置甄別、局部優化和數據重構,從而得到準確、完整的線形曲線,見圖4。

圖4 信號頻域解析及線形重構曲線
由圖4b)虛線框可見,處理前光纖陀螺經過路面時存在著明顯的抖動,處理后曲線變得更加光滑,且整體線形并未受到影響。
3 新建大跨橋梁荷載試驗
3.1 橋梁線形測量方法
將裝載光纖陀螺連續線形檢測系統的運載小車駛入待測橋梁,根據現場實際加載情況,選擇大橋上、下游最外側車道作為檢測小車行駛車道。選定橋梁兩端的伸縮縫作為檢測的起點和終點,系統啟動后,令檢測小車對準前進的方向,靜置3 min,以便光纖慣性系統初始對準;檢測完畢后,計算機輸出待測橋梁初始線形;隨后將已知標定點帶入系統,采用EMD和ICA混合噪聲處理方法對檢測數據進行分析和處理,即可得到準確線形曲線。其主要過程見圖5。

圖5 光纖慣性橋梁連續線形檢測流程圖
所有傳感檢測設備均集成在檢測小車內部,不受外界惡劣天氣影響;檢測過程中,檢測小車以30 km/h左右行駛,避免振動幅度過大給系統檢測帶來誤差;在條件允許的情況下,可以通過多次取平均方法消除系統誤差。
3.2 主體橋梁荷載試驗
湖北省內某長江公路大橋是“953”高速公路網縱五線的控制性工程,主橋采用主跨820 m的雙塔不對稱混合梁斜拉橋方案,橋跨布置為75 m+75 m+75 m+820 m+300 m+100 m。
本次靜載試驗主要針對起控制作用的主梁、斜拉索和主塔截面進行加載測試,選取中跨最大撓度(B截面)、跨中(N截面)作為控制截面觀測點,其中B截面偏離跨中31.6 m,在各種工況荷載作用下,采取多級加載的方式對主梁進行整體撓曲線觀測。采用光纖慣性檢測小車對橋梁整體線形曲線進行測試,與此同時,采用氣-液耦合壓差式撓度儀對主梁關鍵截面撓度進行對比測試,具體各工況略。
以主試驗跨B截面最大正撓度加載工況中跨偏載3為例,加載車輛主要分布在跨中區域,分5級加載,其中二級加載為27輛車,五級加載為54輛車,車重350 kN。受現場時間限制,光纖慣性檢測小車只針對二級、五級加載進行測試,采用基于EMD和ICA混合噪聲處理方法對檢測數據進行分析、處理后得到的主跨整體線形曲線見圖6。

圖6 分級加載線形曲線
由圖6可見,二級加載和五級加載最大下撓點均在B截面,與理論計算是一致的;隨著分級加載荷載的增加,B截面下撓變形逐漸增大,且左、右兩側主塔另一端附近出現反拱(翹起來)現象,卸載后大橋整體線形基本恢復至加載前空載狀態,與結構受力分析相吻合。
以主試驗跨B截面最大正撓度加載工況4為例,工況4為中跨中載,加載車輛主要分布在跨中區域,其中左、右幅各3列加載車隊,每列9輛,分5級加載。采用基于EMD和ICA混合噪聲處理方法對滿載時的檢測數據進行分析、處理,得到的主跨整體線形見圖7。

圖7 主跨中載最大撓度曲線
該工況下,采用2種方法測量N截面、B截面得到的撓度值與理論計算值見表1。

表1 最大荷載下控制截面撓度對比值 m
由圖7可見,加載后的上、下游主梁整體撓曲線基本一致,說明主梁整體對稱性良好;光纖慣性系統測量的連續線形曲線與高精度撓度儀散點測量值擬合得到的線形曲線基本重合,說明光纖慣性系統測量的線形是可靠的,其測量精度較高;兩者測量值均與理論計算值存在一定的偏差,說明實際測量值與理論計算值存在一定的區別。滿載時最大下撓點在B(見表1)截面,與理論計算是一致的;在B截面,光纖慣性系統測量的撓度值與高精度撓度儀測量值相差1.5 cm左右,其測量值更接近于理論計算值;對于新建大跨度橋梁,當主跨荷載形變達到米級時,光纖慣性系統檢測精度滿足工程測量需求。
3.3 試驗總結
從以上數據分析可知,對于新建大跨度橋梁荷載試驗,無論是偏載還是中載,光纖慣性檢測系統均能較好地實現對橋梁整體線形進行連續式測量。通過采用基于EMD和ICA混合噪聲處理方法對線形數據進行分析和處理,得到的撓度值與傳統差分撓度儀測量結果十分接近,且誤差在1 cm左右,滿足工程測量需求。
4 結語
基于光纖慣性傳感技術的線形檢測系統借助運載平臺對結構表面進行移動式檢測時,待測結構表面無需安裝任何傳感器,在檢測過程中無需封路,不影響交通, 具有方便、快捷、測量點連續、精度高等特點。該系統使用便捷、移植靈活、效率高,特別適合大跨度新建橋梁多工況荷載試驗,能夠準確定位橋跨最大下撓處,不遺漏任何病害部位。采用小波分析、經驗模態分解(EMD)和獨立成分分析(ICA)混合信號處理方法對外界振動引起的噪聲信號進行提取、濾波和線形數據重構,可以確保線形測量結果的準確性和完整性。該技術已經30多座大、中型橋梁結構健康巡檢中得到推廣使用,受到用戶好評。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
湖南教育·A版(2019年4期)2019-05-10 03:31:44
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
小學生學習指導(低年級)(2019年4期)2019-04-22 03:28:24
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
山東工業技術(2016年15期)2016-12-01 05:31:04
海峽科技與產業(2016年3期)2016-05-17 04:32:12
