飛鳥與無人機目標雷達探測與識別技術進展與展望
2020-10-24 11:01:44陳小龍陳唯實饒云華董云龍
雷達學報 2020年5期
陳小龍 陳唯實 饒云華 黃 勇 關 鍵 董云龍
①(海軍航空大學 煙臺 264001)
②(中國民航科學技術研究院機場研究所 北京 100028)
③(武漢大學電子信息學院 武漢 430072)
1 引言
鳥擊是指航空器起降或飛行過程中與鳥類等相撞的事件,或是因為動物活動影響到正常飛行活動的事件[1]。全球每年約發生21000起鳥擊事件,造成經濟損失約12億美元。隨著航班量的持續增長和生態環境的不斷好轉,我國機場的鳥擊防范工作壓力越來越大,其帶來的損失遠遠超出其它原因所致之損失,可以說飛鳥是航班起降階段的傳統安全威脅因素。近年來,以旋翼無人機(Unmanned Aerial Vehicle,UAV)等消費行無人機為代表的低空飛行器得到了快速發展,全國多個機場接連出現無人機“黑飛”擾航事件[2],非法放飛無人機成為新的焦點問題,同“鳥擊”一起成為威脅機場凈空區航班起降安全的“兩大隱患”,如圖1所示。
傳統的機場鳥情觀測依靠人工,但在目測困難的黎明、黃昏和夜晚,恰恰是鳥擊事件的高發期。雷達探鳥系統能夠克服天氣因素、距離、晝夜變化等不利因素的影響,真正意義上實現全天24 h不間斷獲取空中鳥類的距離、方位、速度、高度等實時信息,實現鳥情不間斷監測。經過30多年的發展,國內外已經研制出了相對成熟的“雷達探鳥系統”,最具代表性的是美國的Merlin雷達、加拿大的Accipiter雷達、荷蘭的Robin雷達,以及中國民航科學技術研究院(簡稱“航科院”)開發的“機場雷達探鳥與驅趕聯動系統”。2018年8月,民航局發布《機場新技術名錄指南(2018—2020年度)》,聚焦機場運行安全和效率,兼顧便捷服務以及施工安全,共4大類25項新技術,鳥擊防范技術位列其中。目前,多數探鳥雷達產品全部采用S波段水平掃描雷達與X波段垂直掃描雷達相結合的方式,并與部分驅鳥設備實現了聯動,但機場普遍反應,目前的探鳥雷達系統的探測率低于75%,且存在一定虛警,探測效果還不能滿足機場需求,聯動系統驅鳥效果不明顯。
無人機等低空飛行器的出現和迅速發展,對空中航路安全、城市安保等提出了嚴峻挑戰[3]。2015年至今,為維護民航機場凈空保護區域飛行安全,加強對無人機運行的管理,國家、各部委及民航局相繼出臺了多部規章標準,包括《無人駕駛航空器飛行管理暫行條例(征求意見稿)》、 《輕小無人機運行規定(試行)》、 《民用無人駕駛航空器實名制登記管理規定》、 《無人機云系統接口數據規范》、 《無人機圍欄》等。在民航局于2018年8月發布的《機場新技術名錄指南(2018—2020年度)》中,“鳥擊防范技術”和“無人機反制技術”位列其中,在2019年1月的省部級領導干部研討班上,習近平總書記再次強調“要加快科技安全預警監測體系建設,圍繞無人機等領域,加快推進相關立法工作”。但目前,對無人機和飛鳥的監視,尤其是識別仍缺乏有效的技術和手段,“黑飛”和“擾航”現象仍十分普遍,一些簡易航空器容易偏離預定航線,若進入重要區域上空,或被恐怖分子利用攜帶危險武器,將嚴重威脅公共安全,如圖2所示。
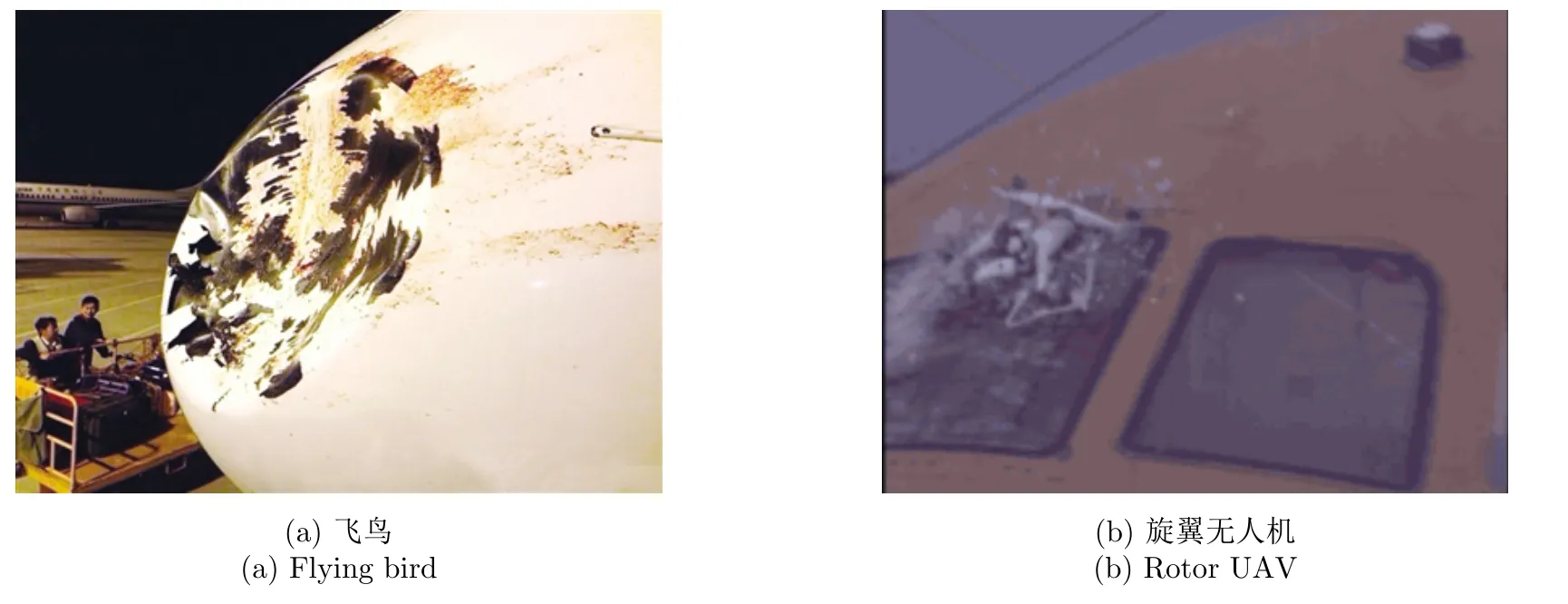
圖1 飛鳥、無人機對民航飛機的威脅Fig.1 The threat of flying birds and UAVs to civil aviation aircraft
針對“合作”入網的無人機,其飛行信息實時接入“無人機云”等管理系統,監管部門可對誤入相應區域的無人機進行查詢、記錄;針對“合作”但未入網的無人機,生產商可通過監聽“飛控協議”,對相關品牌產品的飛行狀態進行監控。上述合作式監管技術目前已能覆蓋95%以上的消費級無人機,剩余不足5%的非合作飛行器是防范的重點和難點[4]。以機場凈空區為例,針對無人機、飛鳥等不同的“低慢小”入侵目標,機場在發現目標后需要采取不同的反制措施:發現無人機目標后,機場首先發出預警,引導起降航班避讓,并協調機場及地方公安進行處置;發現飛鳥目標后,機場將基于一定的驅鳥策略,綜合采用多種驅鳥設備將其驅離危險區域或采取一定的規避措施。因此,有必要對無人機和飛鳥目標進行識別判性。
無人機和飛鳥目標種類繁多,其尺寸、形狀及運動特性的不同導致目標具有不同的雷達散射特性和多普勒特性,是典型的“低慢小”目標[5],具有低可觀測性[6,7]。具體體現在:(1)目標尺寸較小,散射截面積(Radar Cross Section,RCS)小,速度較慢,目標回波藏匿于強雜波或噪聲背景中,信雜比低;(2)目標機動飛行導致多普勒擴散,目標回波難以積累;(3)雷達回波微弱,目標特征提取和估計難;(4)雷達精細化處理過程面臨挑戰,目標分類識別難度大。目前對“低慢小”目標檢測方法主要涉及恒虛警檢測(Constant False Alarm Rate,CFAR)、動目標顯示(Moving Target Indicator,MTI)、動目標檢測(Moving Target Detection,MTD)、相參積累、特征檢測等方法。在利用現有技術對“低慢小”目標進行探測時,由于環境復雜(機場、城市、臨海等)、虛假目標多、目標機動性強、有效觀測時間短等諸多問題的存在,使得目標檢測概率低、雜波虛警高、積累增益低、跟蹤不穩定,給目標檢測和判性帶來極大困擾(圖3),使得飛鳥和無人機探測成為世界性難題。由于部分涉及敏感關鍵技術,新技術和新方法也少有公開報道。迫切需要研發“看得見(檢測能力強)、辨得明(識別概率高)”的非合作無人機、飛鳥等“低慢小”目標監視新手段和新技術,實現目標的精細化描述和識別。
本文集中對近年來復雜場景下旋翼無人機和飛鳥目標檢測與識別技術的研究進展進行歸納總結,并分析該技術領域存在的問題,指出其發展趨勢。本文內容安排如下:第2節介紹飛鳥和無人機探測的主要手段,包括國內外探鳥雷達的研發情況、非合作無人機目標的無線電監測、音頻探測、光電探測、主動和被動雷達探測和識別手段,并介紹了相關的系統應用情況。第3節重點介紹飛鳥與無人機目標檢測與分類識別的技術方法,一方面從目標特性認知與特征提取方面入手,介紹回波建模和微動特性認知方法、泛探模式下目標機動特征增強與提取技術以及分布式多視角微動特征提取技術,目的是提高檢測能力,實現目標的精細化特征描述;另一方面結合機器學習或深度學習方法,提出目標智能識別的有效技術途徑,依據運動軌跡差異實現區分無人機和飛鳥的目的;最后,介紹了作者團隊在此方面的工作。第4節和第5節針對現有研究存在的不足,提出今后的研究發展趨勢。第6節對全文歸納總結。

圖2 無人機危害公共安全Fig.2 UAVs endanger public safety
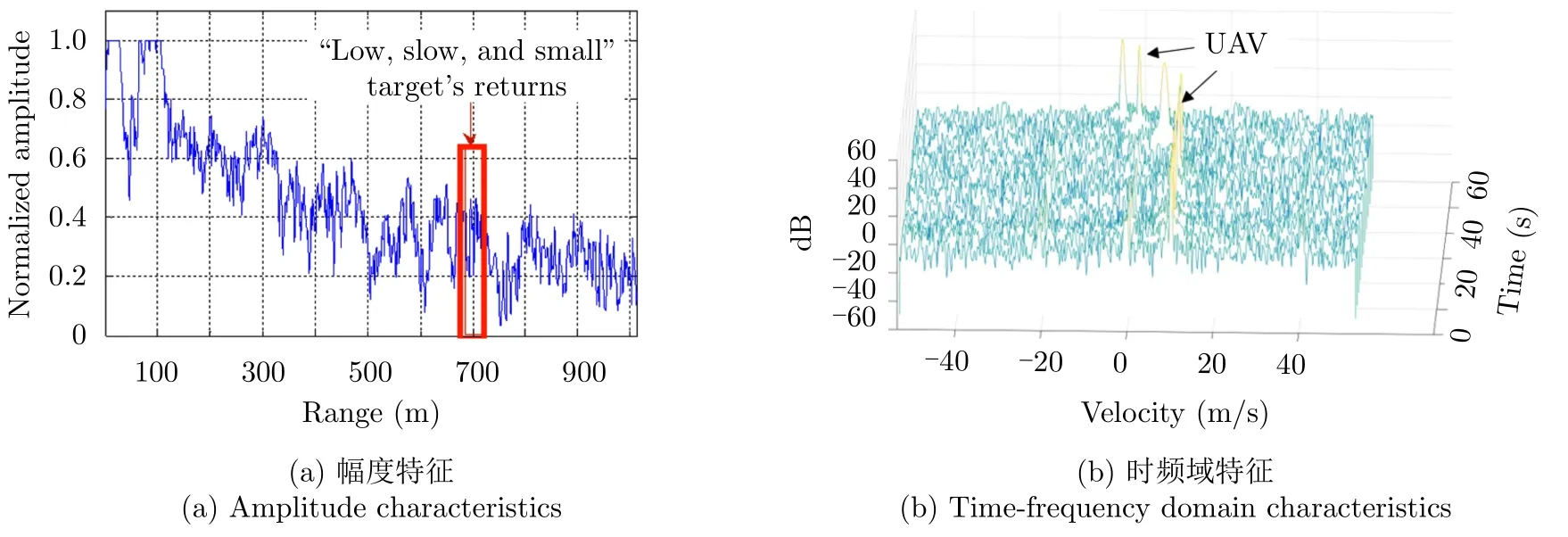
圖3 “低慢小”目標雷達回波Fig.3 “Low,slow,small” target radar echo
2 飛鳥和無人機探測的主要手段
2.1 飛鳥目標探測
飛鳥是機場凈空區的傳統安全隱患。鳥擊防范長期以來是威脅飛行安全的國際性難題,隨著航班量的持續增長和生態環境的不斷好轉,我國機場的鳥擊防范工作壓力越來越大。雷達是鳥情觀測的重要技術手段,其優點在于不受能見度等因素的限制,能夠全天候自動運行。氣象雷達和空中交通管制雷達最早被用于監視鳥類活動,特別是較大區域(幾百千米)內的大群鳥類遷徙,但此類大型雷達分辨率較低,不適于機場等較小區域(10 km)內的鳥情觀測。目前,應用較為廣泛的雷達探鳥系統通常采用體積較小、功耗較低的海事雷達,通過對其天線、信號與數據處理等部分的改造,實現以更高的分辨率在較小的區域內跟蹤小型鳥群或單只鳥運動。
圖4給出了國外3款探鳥雷達及其獲取的含有飛鳥目標的雷達圖像[8,9]。2005年,Braun[10]回顧并比較了不同類型探鳥雷達的特點和用途。國際上,典型的探鳥雷達系統包括美國的Merlin雷達、加拿大的Accipiter雷達、以及荷蘭的Robin雷達。如圖4所示,Merlin雷達采用S波段水平掃描雷達覆蓋機場周邊的低空空域以及X波段垂直掃描雷達覆蓋航空器的起降通道,并采用專業鳥情信息提取算法分離出飛鳥目標信息;Accipiter雷達為X波段拋物面天線,其波束較窄(4°),系統可獲得較為精確的高度信息,但探測的范圍有限;Robin雷達除了S波段水平和X波段垂直掃描雷達外,還包括一部調頻連續波雷達,專為飛鳥目標判性設計。表1比較了3款探鳥雷達的技術特點和部署方式。在國內,航科院與北京航空航天大學2006年以來開展了雷達探鳥可行性驗證,并利用航海雷達獲取的視頻圖像開展了相關研究[11,12]。近年來,航天二院、北京理工大學、國防科大等單位也相繼開展了基于相控陣、MIMO、全息雷達等先進雷達技術的雷達探鳥研究[13]。但是,目前大部分探鳥雷達僅能利用目標回波強度,按照鳥群、大鳥、中鳥、小鳥進行大致分類,且不具備區分飛鳥與無人機目標的能力。
2.2 非合作無人機目標探測
一般的消費級無人機價格便宜,小巧輕便,是干擾公共安全和破壞戰略要地的入門手段,例如,無人機材料質地堅硬,其與高速飛行的飛機相撞,較之于鳥擊的破壞力更大[14]。世界各國為此投入大量人力物力開展無人機反制技術研究,并形成了一批新型技術與設備[3]。現有探測技術主要分4類,即無線電監測、音頻探測、光電探測和雷達探測技術[15],各技術的研究現狀分述如下:
(1) 無線電監測手段。無線電監測采用射頻掃描技術,針對民用無人機遙控和圖傳信號頻段進行實時監測、分析和測向。該技術可通過掃描該頻段得到無人機控制信號波形,與系統庫中的無人機控制波形進行對比,判斷是否存在遙控無人機并確定其類型[16—18]。羅德與施瓦茨(R&S)公司、國防科技大學、中電41所等均采用無線電偵測技術研制了相關系統,部分系統已在我國白云機場、寶安機場、雙流機場試用,并取得良好效果,典型系統如圖5(a)所示。但無線電監測單站測量通常只有目標方位信息,測量精度低,且對于巡航式電磁靜默的無人機,該監測手段可能失效。
(2) 音頻探測手段。每種無人機都有獨特的螺旋槳旋轉聲,稱為音頻指紋,采集各種無人機的音頻指紋可以建立數據庫,通過將定向麥克風探測的音頻數據與數據庫進行匹配,不僅能夠探測到無人機,還能夠識別出無人機型號。韓國電子技術附屬研究所、法國圣路易斯法德研究所、匈牙利歐布達大學等均研制了基于音頻探測技術的無人機反制系統并提出了相關解決方案,典型系統如圖5(b)所示[19—21]。但音頻探測技術易受噪聲、雜波影響,對于大型無人機效果較好,中小型無人機聲音小,加之環境中的噪聲干擾嚴重,導致探測效果不佳。

圖4 典型探鳥雷達系統Fig.4 Typical avian radar systems

表1 國外3種典型探鳥雷達產品說明Tab.1 Description of three typical foreign avian radar products
(3) 光電探測手段。光電探測技術主要利用可見光和紅外圖像完成目標探測和識別。德國光電系統技術和圖像開發研究院、長春光機所等均開發了基于光電技術的無人機探測系統,但光電探測易受環境光線干擾,且“低慢小”目標光電信號較弱、信噪比低,加之在機場環境下,大小目標遮蔽效應、飛機發動機強烈的紅外輻射都使光電探測、識別、跟蹤的難度進一步增大[22—24]。因此,光電探測技術通常作為雷達、無線電監測的補充確認設備。圖5(c)所示為一種典型的雷達光電復合探測系統。
(4) 雷達探測手段。(a)主動雷達探測:雷達作為目標探測和監視的主要手段,在空中和海面目標監視以及預警探測等國防和公共安全領域應用廣泛。雖然傳統雷達對于“低慢小”目標存在探測效能不足的問題,但雷達仍作為對空目標探測的重要手段被廣泛采用。隨著雷達體制和信號處理技術的快速發展,其已具備獲取微弱目標特性的潛力,為低可觀測目標探測和識別提供了新的途徑[7]。系統方面,開發低成本的新型雷達探測系統已受到世界各國防務公司和科研院所的重視。德國應用科學研究院(FHR)利用Ku波段MIMO體制雷達,針對無人機目標信號與雜波相互耦合的現象,通過環境數據訓練檢測器在雜波區和非雜波區的檢測門限,改善了雷達對低速目標的檢測性能[25]。英國防務公司Selex ES的“隼盾”(falcon shield)的電子戰系統,該系統不僅能夠探測、定位、識別、干擾、打擊低空慢速飛行的小型無人機(“低慢小”目標),還能夠接管目標無人機的指控權并引導其安全降落,系統由雷達、光電監視系統、指控組件、電子偵察與射頻威脅管理系統等組成,雷達采用相參信號處理算法,提高目標抗雜波能力,如圖6(a)所示。Blighter公司的反無人飛行器防御系統采用雷達準確定位無人機(圖6(b)),然后通過發射定向大功率干擾射頻,干擾無人機迫使其降落[26]。瑞典薩博公司拓展了“長頸鹿”AMB雷達能力,使其在常規模式下提供空中監視能力的同時,探測、分類和跟蹤低速飛行的小型無人機,并已驗證了在復雜環境下同時應對6架無人機目標的能力[27]。(b)被動雷達探測:主動雷達需要頻率許可、電磁輻射大。某些應用場景,如機場凈空區,具有嚴格的電磁準入制度,管理部門對主動雷達技術的使用通常持謹慎態度,即使是科學實驗,也需要經過嚴格的審批流程,而外輻射源雷達具有功耗低、隱蔽性和覆蓋性好等優點,作為一種經濟安全的非合作目標探測手段近年來引起了學術界的廣泛關注。尤其是隨著硬件性能的提升,以及通信和無線網絡等可用外輻射源的發展,外輻射源雷達引起了各國的普遍重視和深入研究[28,29]。德國應用科學研究院、瑞士國防裝備采購局、法國國家航天航空研究中心、武漢大學等國內外科研機構利用電視、數字電視、數字音頻廣播、衛星及移動通信等信號作為雷達外輻射源進行了大量的理論與應用研究[30]。

圖5 典型非合作無人機探測系統Fig.5 Typical non-cooperative UAV detection system

圖6 國際典型的“低慢小”目標探測系統Fig.6 International typical “low,slow,small” target detection system
在低空目標探測方面,尤其是無人機探測方面,基于外輻射源雷達進行探測的研究得到廣泛關注,英國斯凱萊德大學[28]研究了基于全球導航衛星系統(Global Navigation Satellite System,GNSS)信號的外輻射源雷達直升機目標分類識別,可實現直升機目標分類。芬蘭奧魯大學[31,32]開展了基于DVBT信號的外輻射源雷達直升機探測實驗,觀測到了直升機葉片轉動的微多普勒效應,并進一步研究得到了邊帶頻率譜線間隔與葉片轉動速率之間的關系。華沙工業大學[33]基于DVB-T照射源也開展了類似的實驗研究,推導了雙基地下直升機旋轉葉片回波數學模型。南非科學與工業研究理事會[34]開展了基于調頻 (Frequency Modulated,FM)信號的螺旋槳飛機探測實驗,成功提取到了螺旋槳回波微多普勒特征。羅馬大學的Martelli等人[35]研究了利用地面數字電視廣播(Digital Video Broadcasting-Terrestrial,DVB-T)外輻射源雷達AULOS在機場區域同時對無人機與民航飛機進行監測,其實驗結果表明,通過長相干積累該雷達對機場周圍飛行無人機(大疆精靈4和御)的單站探測距離可達約3 km,如圖7所示。同時,他們還利用Wi-Fi信號對無人機進行了探測,研究表明可對3D空間無人機進行穩定跟蹤,但其精度較差[36]。馬來科技大學Rsa R A等人[37]從理論分析了利用DVB數字電視衛星信號進行無人機前向散射探測的可行性。

圖7 DVB-T外輻射源雷達AULOS無人機探測結果[35]Fig.7 DVB-T passive radar AULOS UAV detection results[35]
國內,武漢大學[38—41]電波傳播實驗室在利用外輻射源雷達對無人機探測方面進行了較多的研究,利用數字電視地面廣播(Digital Television terrestrial Multimedia Broadcasting,DTMB)信號進行無人機探測實驗,結果表明通過雜波抑制后,對于典型的大疆精靈3無人機,其探測距離超過了3 km,如圖8所示。圖9給出了基于數字電視信號外輻射源雷達的無人機目標監視應用場景示例。
2.3 無人機目標雷達識別系統
國外相關機構在無人機分類和識別方面已經開展了研究并形成了產品,代表性的有:(1)德國應用科學研究院(FHR)[42]利用環境中的全球移動通信系統(Global System for Mobile communications,GSM)信號,構建了一套多通道外輻射源雷達探測系統GAMMA-2(圖10),探索了外輻射源雷達獲取“低慢小”目標微動特征的可能性;(2)法國國家航天航空研究中心(ONERA)[43]采用特高頻(Ultra High Frequency,UHF)頻段DVB-T信號,通過多頻及單頻組網探測,不僅可對3 km處的無人機目標實現連續定位跟蹤,更能探測到多旋翼無人機的微多普勒效應,將該體制雷達對“低慢小”目標的探測推向更為精細化的應用;(3)荷蘭TNO研究院進行了無人機微多普勒測量實驗,利用經典時頻分析方法進行微動特征提取;(4)英國倫敦大學[44]針對無人機的“低慢小”特性,通過布置一發三收S波段雷達系統NetRAD(圖11),利用多旋翼無人機的微多普勒特性,彌補時域維探測效能不足的問題,提升目標的定位跟蹤性能;(5)荷蘭Robin公司[45]的新一代雷達采用調頻連續波波形,利用微動特性區分無人機和飛鳥目標,同時具備無人機探測和識別功能(圖12);(6)英國Aveillant公司[46]的全息雷達(圖13)采用數字陣列體制,主要通過固定、凝視探測方式,延長駐留時間,能夠獲取目標的精細化特征表述,系統通過基于決策樹分類器的機器學習算法,可對無人機目標和非無人機目標進行分類,同時雷達的軟件系統可以分析目標的運動軌跡,從而將其與其他目標區分開來。
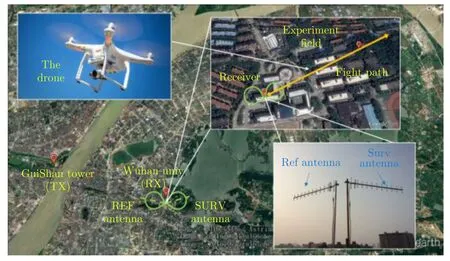
圖8 基于DTMB外輻射源雷達的無人機探測實驗[38]Fig.8 UAV detection experiment based on DTMB passive radar[38]
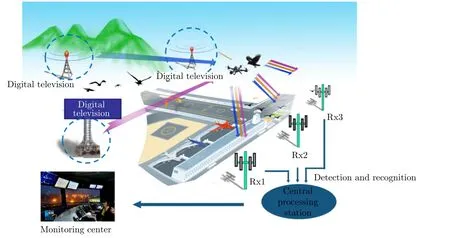
圖9 基于數字電視信號外輻射源雷達的無人機目標監視應用場景示例Fig.9 UAV target surveillance application based on digital TV signal passive radar

圖10 德國FHR多通道無源雷達系統GAMMA-2[42]Fig.10 German FHR multi-channel passive radar system GAMMA-2[42]
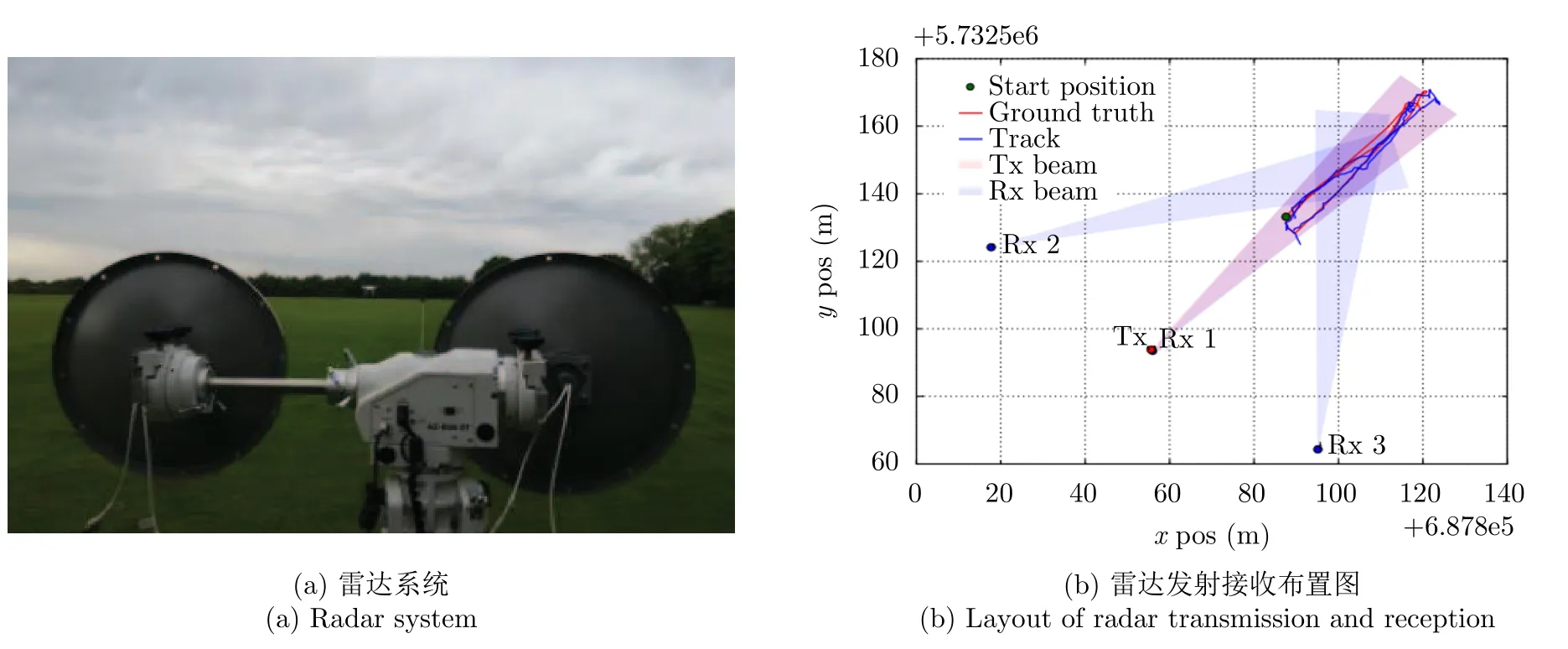
圖11 英國倫敦大學NetRAD雷達系統[44]Fig.11 NetRAD radar system of university of London[44]

圖12 荷蘭Robin飛鳥/無人機識別雷達[45]Fig.12 The Robin birds/UAV recognition radar in Netherlands[45]
3 飛鳥與無人機目標檢測與分類識別主要技術方法
3.1 飛鳥與無人機目標特性認知與特征提取方法
無人機和飛鳥均為非剛體目標,無人機旋翼的轉動和飛鳥的翅膀扇動會在由主體平動產生的雷達回波多普勒頻移信號附近引入額外的調制邊帶,該信號稱為微多普勒信號,產生微多普勒效應[47]。微多普勒反映的是多普勒頻移的瞬時特性,表征了目標微動的瞬時徑向速度。微多普勒信號中所包含的信息可以反演出目標的形狀、結構、姿態、表面材料電磁參數、受力狀態及目標獨一無二的運動特性[48]。旋翼無人機回波表現為主體和旋翼部件多普勒信號的疊加,不同類型和旋翼個數的無人機其微動特性也不盡相同。
(1)飛鳥與無人機目標雷達回波建模與特性認知。飛鳥與旋翼無人機目標的回波多普勒譜出現展寬,飛鳥翅膀扇動與無人機旋翼轉動對回波產生調制特性,具有時變和周期性,體現出微動特征[49]。對飛鳥與旋翼無人機微多普勒特征的建模和精細特性認知是后續檢測和目標分類的前提條件。旋翼無人機的回波信號表現為無人機主體多普勒信號和旋翼部件微多普勒信號的疊加,如圖14所示。首先是對含微動部件的無人機目標主體運動和微動進行建模分析與參數化表征,推導多普勒頻率、旋轉速率、葉片數目和尺寸之間的對應關系[50]。對于多旋翼的無人機,假設各旋翼葉片的RCS相同且均為1,在直升機旋翼模型基礎上,多旋轉旋翼的無人機目標回波模型為[51,52]

圖13 英國Aveillant公司全息雷達系統[46]Fig.13 The holographic radar system from Aveillant,UK[46]
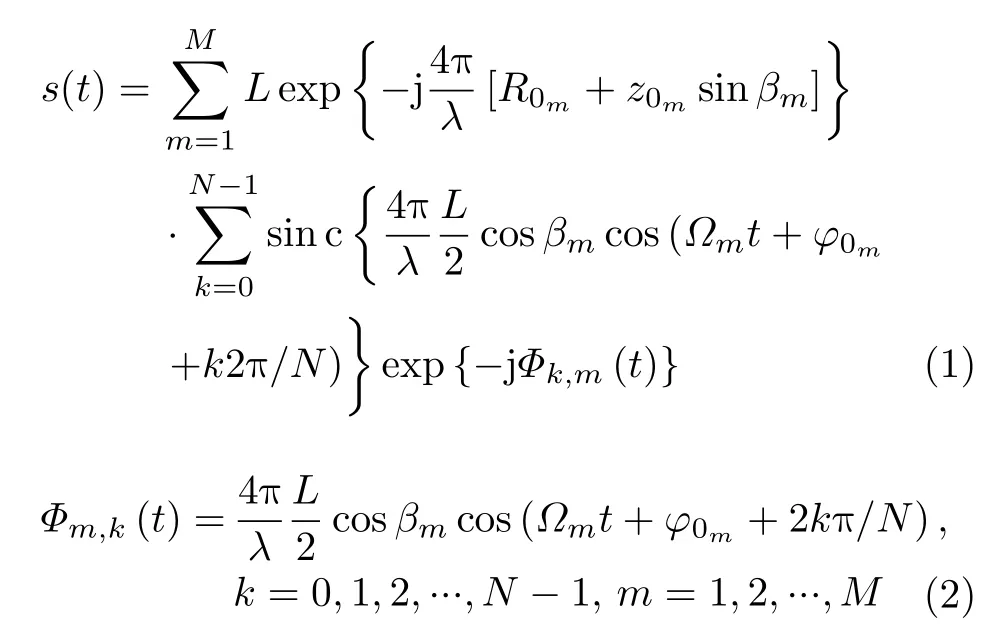
式中,M為旋翼數,N為單個旋翼葉片數,L表示旋翼葉片長度,為雷達到第m個旋翼中心的距離,表示第m個旋翼葉片的高度,βm為雷達到第m個旋翼的俯仰角,?m為第m個旋翼的轉動角頻率,為第m個旋翼的初始旋轉角。
回波信號的瞬時多普勒頻率可由信號的相位函數求時間導數得到,得到第m個旋翼的第k個葉片的等效瞬時微多普勒頻率為

圖14 旋翼無人機微動特性[53]Fig.14 Micro-motion characteristics of six-rotor UAV[53]

由式(3)可知,多旋翼無人機微多普勒特征是由M ×N條正弦形式的曲線組成,且受到載頻、旋翼數目、旋翼轉速、葉片數、葉片長度、初始相位和俯仰角的影響。其中,載頻、葉片長度和俯仰角僅與微多普勒頻率幅度有關,而旋翼數目、旋翼轉速、葉片數和初始相位將影響微多普勒特征曲線的幅度和相位。進一步分析飛鳥和無人機目標的微動特征差異,圖15—圖17給出了兩種目標微動信號的初步仿真對比結果。圖15為X波段雷達的飛鳥、四旋翼無人機和無人直升機的微多普勒時頻圖,通過對比可知,飛鳥目標微多普勒多集中在低頻區,振動周期較長,這與不同類型鳥類翅膀的撲翼運動特點密切相關,而無人機目標的微動特征呈現明顯的周期特性,根據旋翼轉速和長度的不同,轉動頻率和周期也不同,由此可知,飛鳥目標和無人機微動特性有明顯差異。圖16為仿真的飛鳥目標外輻射源雷達微動特性分析,外輻射源中心頻率分別為658 MHz和900 MHz,由于照射源的頻率較低,波長較長,導致微動特性并不明顯。圖17為武漢大學前期開展的無人機微多普勒效應實驗結果,探測大疆M100無人機,該無人機旋翼數為4,每旋翼葉片數為2,葉片長度17.25 cm,最大轉速為129.5 rps,無人機處于懸停狀態,可知,各旋翼旋轉葉片的調制回波凸顯,表現為頻譜的展寬,能觀察到無人機的微多普勒效應,且各旋翼轉速的不同導致占據多個多普勒單元。
圖18給出了大疆S900無人機和貓頭鷹的微多普勒特征對比[54],由于無人機旋翼轉速較快,其微動周期明顯快于飛鳥,但強度弱于飛鳥目標微多普勒,此外,由于飛鳥機動導致的翅膀扇動不規律,使其微多普勒更為復雜。無人機和飛鳥微動特征有明顯差異,從而為無人機和飛鳥目標的準確探測與精確識別提供不依賴于先驗信息、可靠性高、可分性好的重要特征依據。目前,利用微動特征進行飛鳥和無人機目標識別的主要難點是“低慢小”目標回波微弱,微動特征提取難,時頻分辨力低,分類和識別難,且目標與微動特征的對應關系尚不明確。

圖15 飛鳥與無人機微動特征差異Fig.15 Differences in micromotion characteristics of flying birds and UAVs

圖17 無人機目標實測微動特性分析(外輻射源中心頻率658 MHz)[39]Fig.17 Analysis of measured m-D characteristics of UAV target (center frequency of external radiation source 658 MHz)[39]
(2) 泛探模式下機動特征增強與提取技術。利用泛探觀測模式能夠通過延長積累時間,獲取高的信號處理增益、提高速度分辨率,并從多域(時頻域、變換域、特征域)、多維(回波序列、二維微動時頻圖、距離-多普勒圖、變換域圖)、多視角(多接收站位)分析目標運動特征,可實現復雜微動特征高精度提取、機動特征的精確描述[7]。
假設一種外輻射源雷達的雙基地配置,如圖19所示[29]。T0和R0分別為發射站和接收站,L為基線距離。設初始時刻目標位于O點,t時刻運動到O'點,和RT(t)分別為初始時刻和t時刻目標距發射站的距離,和Rr(t)分別為初始時刻和t時刻目標距接收站的距離,目標做勻加速運動,初始速度為v0,加速度為a0,β0為初始時刻的雙基地角,?為目標運動方向。若基帶信號為s(t),t時刻目標回波相對直達波的延時τ=R(t)/c0,R(t)RT(t)+Rr(t)?L,c0為光速,λ為波長。將R(t)在t=0處Taylor展開,并忽略2次以上項,則回波信號模型可簡化為
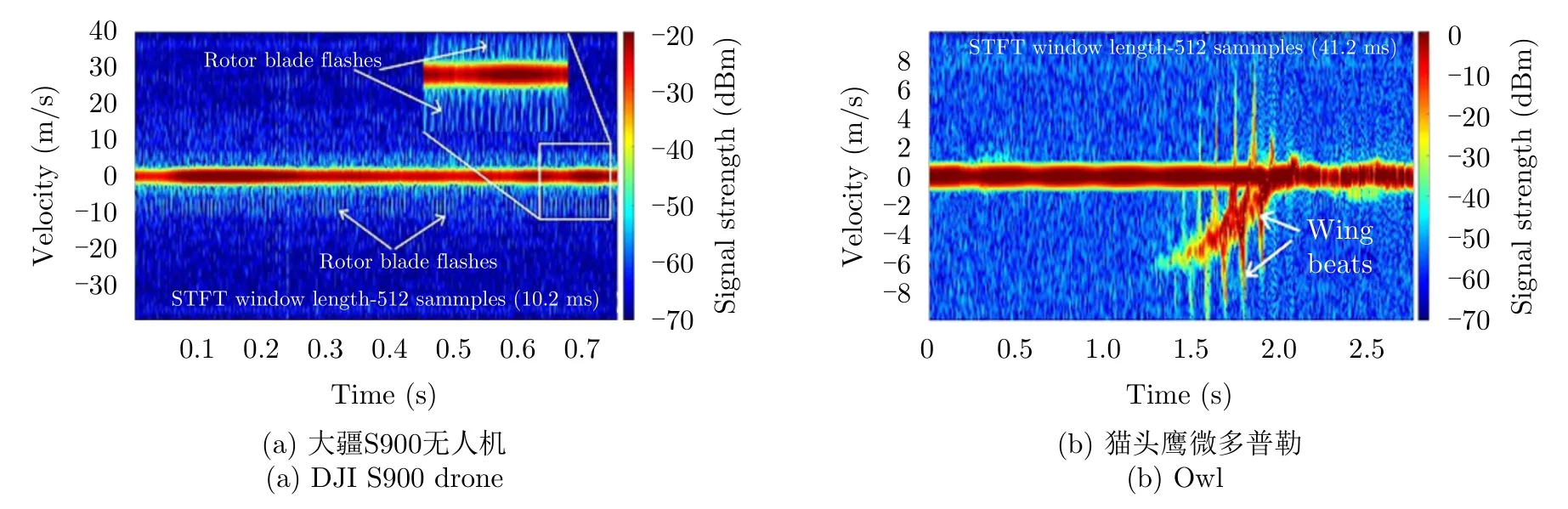
圖18 無人機和飛鳥目標微多普勒(24 GHz)[54]Fig.18 Micro-Doppler (24 GHz) for UAV and bird targets[54]
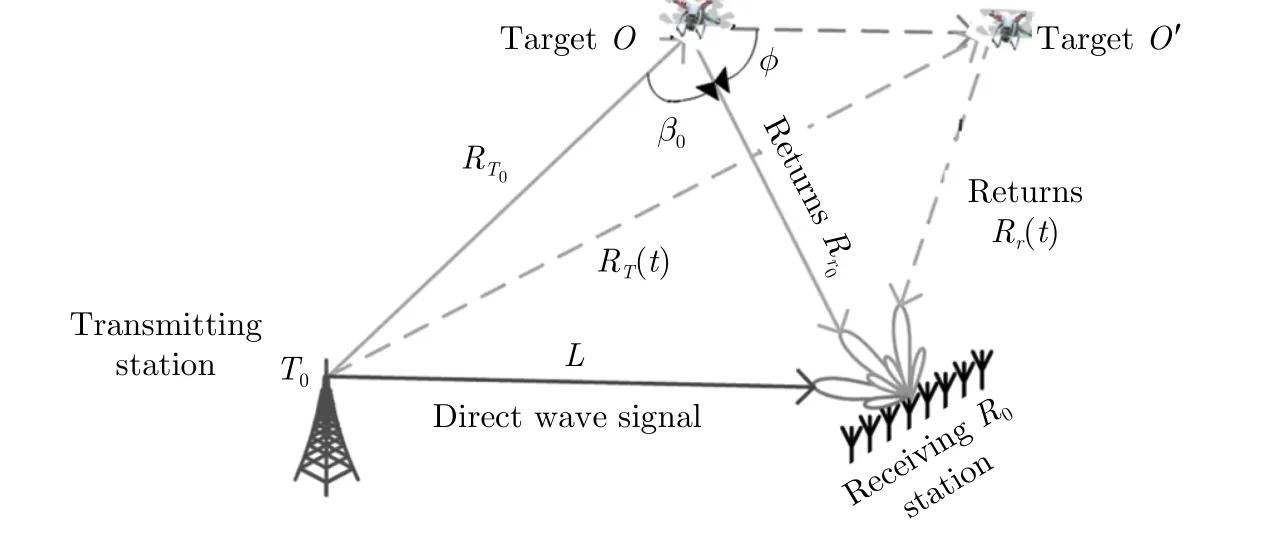
圖19 雙基地外輻射源雷達配置圖Fig.19 Configuration diagram of bistatic passive radar

式中,fc為載波頻率,A0為回波信號幅度,t和tm分別為進行外輻射源信號二維分時處理后的快時間和慢時間,如中國移動多媒體廣播(China Mobile Multimedia Broadcasting,CMMB)信號規定1 s的信號為1幀,并將其劃分為40個時隙,每個時隙長25 ms,又可劃分為1個信標和53個正交頻分復用(Orthogonal Frequency Division Multiplexing,OFDM)符號,以OFDM符號為處理單元劃分快時間和慢時間

由此可知,在較長的觀測時間內,目標的時延和多普勒頻率分布一定區間內,即同一個目標可能對應多個距離單元和多普勒單元,產生距離徙動和多普勒徙動。距離徙動的大小取決于目標速度在雙基角平分線的投影值與平臺速度在觀測角平分線的切向投影值;多普勒徙動取決于目標、平臺速度的切向分量及目標距發射站、接收站距離,基線距離,以及目標、平臺加速度的切向分量。
若目標做高階機動,則可將長時間信號模型統一為

3階多項式可描述大部分的機動目標的運動,即

傳統的距離和多普勒徙動補償方法多為分段分步補償,即先進行距離徙動補償,后進行多普勒徙動補償,算法復雜且后續補償性能受制于前續結果,不能實現回波信號的長時間快速相參積累。基于參數搜索的長時間相參積累(Long-Time Coherent Integration,LTCI)方法[55—57]根據預先設定的目標運動參數(初始距離、速度和加速度)搜索范圍,提取位于距離-慢時間二維平面中的目標觀測值,然后在相應的變換域選擇合適的變換參數對該觀測值進行匹配和積累,但該方法的主要問題在于需要多維參數搜索,導致運算量較大,增加了工程應用的難度。
為此,可基于非參數搜索的長時間相參積累方法,通過快速降階處理和多項式相位補償等思路,提高算法運算效率。文獻[58]提出了一種基于非均勻采樣降階運算和變標尺度變換(Non-Uniform resampling and Scale Processing,NUSP)的機動目標長時間相參積累檢測方法(NUSP-LTCI),如圖20所示,并用于低空飛行目標檢測,該方法僅通過1次非均勻采樣降階運算,將高階相位信號降階至1階相位信號,相比傳統逐次降階法降低了交叉項的影響,提高了參數估計精度;無需參數搜索匹配計算,降低了運算量,適合工程應用;能夠同時補償距離和高階多普勒走動,實現長時間相參積累,提高雷達強雜波背景下的機動目標檢測能力。如圖21給出了一低空直升機目標雷達相參積累結果對比分析,可以看出NUSP-LTCI方法在雜波抑制能力和參數估計精度等方面較傳統的MTD和經典Radon傅里葉變換(Radon Fourier Transform,RFT)方法有明顯改善。
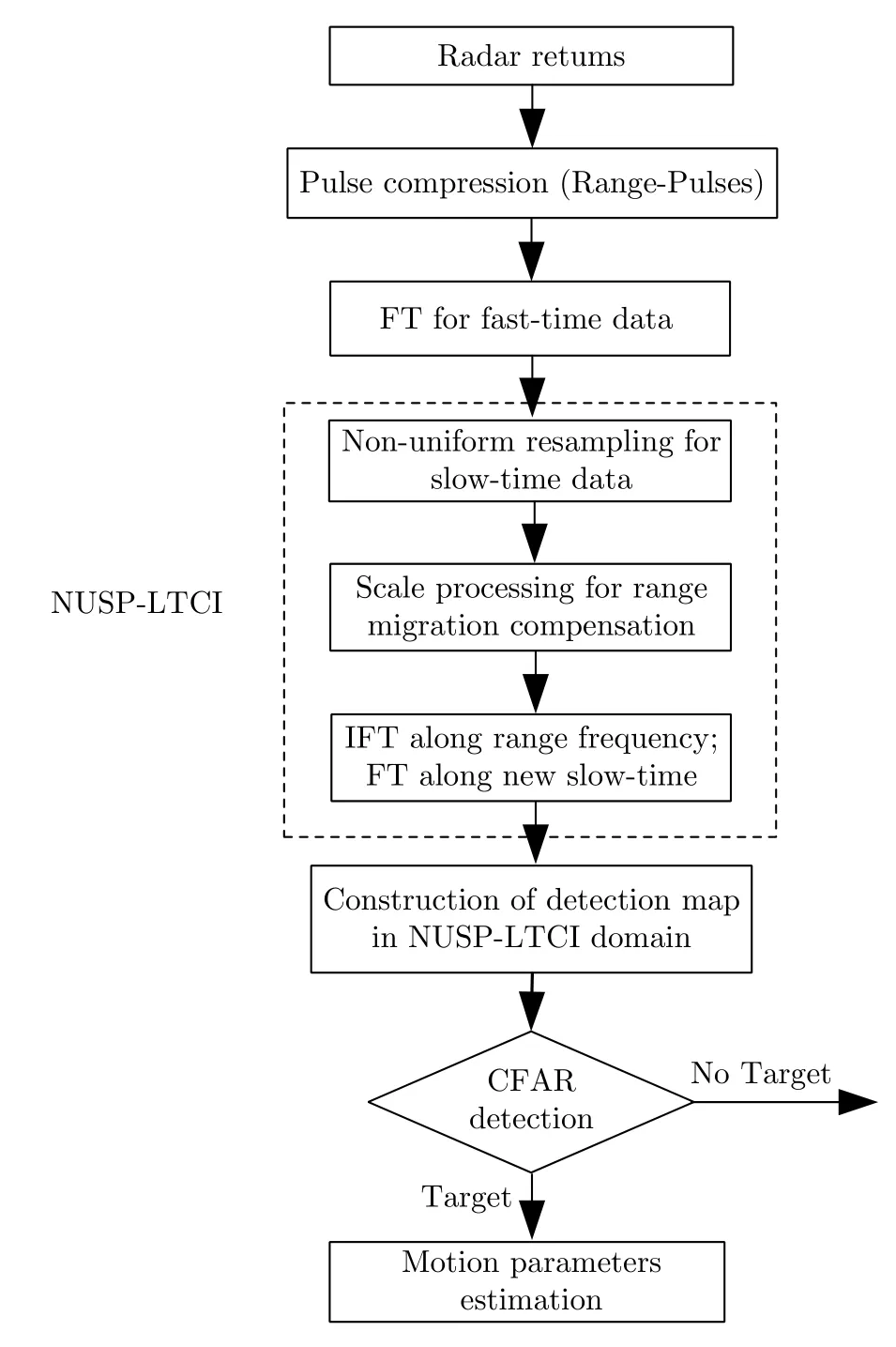
圖20 非參數搜索長時間相參積累(NUSP-LTCI)處理流程[58]Fig.20 NUSP-LTCI processing[58]
非均勻采樣降階運算定義為[59]

非均勻采樣降階運算不同于傳統的相位差分運算,在不進行信號的延遲復共軛相乘逐次降階的前提下,能夠快速將N階相位降階至N/2或N/2+1階,從而大大降低了運算量,并減少了交叉項的影響。而變標尺度變換,借鑒Keystone變換的思想,對時間坐標軸進行尺度變換,消除變量之間的線性耦合關系,可在目標速度未知的前提下實現距離徙動校正。
沿距離向對脈壓后的雷達數據進行傅里葉變換,得到距離頻率-脈間慢時間二維數據

則通過非均勻采樣運算,式(9)可轉變為

由式(10)可知,機動目標回波相位已由關于tm的3階多項式,降階為關于新的時間變量τm的1次項。因此,后續可采用變標尺度變換去除距離頻率f和τm的線性耦合關系,進而實現距離和多普勒的徙動補償。
(3) 分布式多視角微動特征提取技術。由于無人機運動目標姿態變化的復雜性,在不同的雷達視角下,其微多普勒特征將呈現顯著差異,因此,利用分布式多視角雷達探測可提取更加全面的微多普勒特征,從而對目標實現更好的分類[61—63]。以外輻射源雷達為例,外輻射源雷達通常利用數字廣播電視信號作為照射源,其工作頻率較低,在目標精細化特征尤其是微動特征描述方面優勢并不突出,但外輻射源雷達一個重要優勢在于能利用分布式發射站以同時獲得不同視角上的微動分量,從而提高微動特征分辨率[64,65]。圖22給出了單頻網分布式外輻射源雷達微動特征提取的方案流程,利用單頻網分布式外輻射源雷達的多視角特性,分析波數域樣本分布與微動特征分辨率之間的內在聯系,設計接收站位置優化策略以提高目標微動特征分辨率。
對于外輻射源雷達雙基地探測,若基線中點位于空間固定坐標系(X,Y,Z)的原點O,雙基地角為β,方位角為δ(定義為雙基地角平分線與旋轉平面的夾角)。不失一般性,假設旋轉葉片在水平面內轉動,葉片數為K,葉片長度為L,轉動速率為?,若不考慮目標主體運動及多徑雜波的影響,則接收到的理想旋轉葉片回波信號可表示為

其中,A為散射信號強度,函數Φk(t)為

其中,λ為波長,φkφ0+k2π/K,k0,1,2,···,K ?1為各葉片對應的初始旋轉角。
旋轉葉片時域特征由式(11)的幅度決定,即

可見,時域特征是由sinc函數組成的,由sinc函數的定義可知,連續兩個峰值位置之間的時間間隔為

對式(11)作傅里葉變換,得到其頻譜為

圖22 單頻網分布式外輻射源雷達微動特征提取研究思路Fig.22 Method of micro-motion feature extraction via single-frequency distributed passive radar

可見,調制譜是由一系列譜線間隔為?fK?/2π的譜線組成的,Cm為譜線幅度,由Bessel函數確定,式(15)中M為調制譜的譜線條數,由式(16)確定

由此可得調制信號帶寬為

其中,VtipL·?為葉尖速度。
因此,在不同視角條件下,可得到不同的雷達微多普勒回波,對多視角微多普勒特征提取并融合,則可更有益于目標識別與分類。
3.2 飛鳥與無人機目標自動識別方法
近年來,飛鳥與無人機目標自動識別得到了廣泛關注,其主要技術思路與雷達目標識別有相似之處,主要方法包括基于模板的識別方法[66]和基于模型的識別方法[67],前者的主要工作集中在特征庫構建方面,同類目標的特征可以聚類在一起,而不同類的特征在特征空間中是可分離的,通過精心選擇目標的特征,可以有效的對目標進行分類和識別;后者在于目標的物理模型構建,包括其外形,幾何結構,紋理,材質等。這兩種方法都需要有深厚的領域知識來構建特征庫,或者需要特定的模型知識構建模型庫,并且特征庫和模型庫的好壞直接影響識別結果。目前,較為常用的飛鳥和無人機分類流程為,首先檢測目標,然后通過信號處理方法提取飛鳥和無人機的特征[42,68—70],包括RCS特征、高分辨距離像特征、變換譜特征、時頻特征、極化特征等,進而利用特征差異,采用支持向量機(Support Vector Machine,SVM)等方法實現兩者的分類和識別。區別于上述方法,本文對目前的兩種新興方法進行闡述。
(1) 基于機器學習或深度學習的目標識別方法。深度學習方法是一種高效的智能處理方法,相比于傳統的SVM更適合挖掘更高維度的抽象特征,具有良好的泛化能力,并且在雷達領域開始得到應用[71]。深度神經網絡方法可從實測數據中習得目標的各種隱藏特征,無需構造復雜的高逼真度模型,因此在高分辨距離像、微多普勒譜圖和距離多普勒譜圖等識別中有非常好的應用前景[72,73]。由于飛鳥和無人機的時頻微動圖有明顯差異,將其作為數據集采用深度卷積網絡(Convolutional Neural Network,CNN)學習,有望實現目標微動信號的智能化提取和識別[74,75]。目前,該方向處于起步研究階段,卷積網絡的構建、參數設置以及數據集的構造等均需進一步研究。
無人機旋翼和飛鳥的微動特征參數與無人機和飛鳥類型、運動狀態、雷達觀測方式、環境和背景均有密切的關系,試圖從數學建模和特性認知的角度去尋找參數之間的關系,并基于特征差異開展目標識別,是一種可行的技術途徑,但復雜的運動形式和環境因素,其內在的關系有時難以用模型和參數的方式描述清楚。并且作為關鍵步驟的特征提取過程則需要占據相當的系統資源,且特征多為人工設計,從而造成很難獲得目標數據深層本質特征。為了解決雷達目標識別中特征提取面臨的問題,獲取目標深層本質特征信息,提高識別精度,可采用深度學習方法,如深度神經網絡、卷積神經網絡、深度置信網絡和遞歸神經網絡,用于特征描述、提取和識別,通過設置不同的隱藏層數和迭代次數,獲取數據各層次的特征表達,然后和近鄰方法相結合,對目標進行識別[72,73,76]。可采取的思路是:
(a)通過深度學習構建可用于無人機和飛鳥運動模型的參數估計的深度神經網絡結構,取得優于傳統參數模型建模方法和時頻參數估計的效果;
(b)通過卷積神經網絡結構,實現回波信號(如微動信號)的深度特征提取和場景精細化識別;
(c)通過對大量特征數據集的認知學習,利用深度學習方法構建深度網絡結構進行回歸分析來反演運動形式,并以此分析運動特性與運動參數之間的關聯。
對于微動參數估計,由于微動回波信號可以看做是時間-頻率的二維特征數據,可采用卷積神經網絡(CNN),將微動目標回波信號作為輸入數據,經過多層卷積神經網絡,獲得微動模型關鍵運動參數,再將參數代入微動模型,作為代價函數反饋,進行反向傳播,調整權重,重新輸入微動目標回波數據訓練計算,擬合程度越高,證明數據越符合該微動模型,一直到獲得參數較為理想為止,并估算出微動模型的參數,最后計算微動模型與實際信號的誤差。圖23給出了微動時頻圖CNN中各卷積層的數據特征(以LeNet為例)[73],其中,圖23(a)和圖23(c)分別為CNN的第1個卷積層和第2個卷積層的卷積核,圖23(b)和圖23(d)分別為第1個卷積層和第2個卷積層的特征圖,可以看出,CNN能夠提取出數據集中較為精細的紋理和輪廓特征,從而為特征分類和參數估計奠定了基礎。
對于典型的旋轉目標來說,主要估計的就是旋翼轉速ω,需要找到一個合適的參數ω使得微動模型與回波數據擬合,擬合程度越高,證明模型越符合數據。首先需要將雜波數據作為輸入,進入神經元運算,進行卷積運算、池化,進行全連接,經過多層的CNN網絡層,最后通過Softmax層得到兩個輸出,得到一個值向量,根據取值范圍的設定,選定此次訓練后應選取的參數值,代入到原模型中作為代價函數,反向傳播,調整權重,重新訓練,計算數值結果是否擬合于此參數的模型。如相差較大則繼續訓練,直到得到的參數值較為符合訓練數據。由圖23可知,一個CNN由若干卷積層、Pooling層、全連接層組成。可以根據不同的分布模型,構建各種不同的卷積神經網絡來完成此次任務。基于深度學習的微動參數估計流程初步設計如圖24所示。對信號進行特征描述時通過構造深層的卷積神經網絡,獲取中間層網絡,尤其是靠近全連接層的卷積層網絡輸出作為學習獲取的特征描述。
(2) 基于無人機與飛鳥目標運動軌跡差異的識別方法。無人機目標的飛行軌跡相對穩定,而鳥類的飛行軌跡較為多變、機動性高,因此利用兩者運動方式的差異,采用基于運動模型的低空非合作無人機與飛鳥目標軌跡差異特征提取,能夠為兩者的分類和識別提供新的技術途徑[77]。因此,可以通過長時間的探鳥雷達數據積累,對一定周期內的鳥類飛行軌跡數量、飛行高度、飛行方向等數據進行統計分析,結合探測區域鳥情人工調研結果,掌握周邊留鳥的活動節律及過境候鳥的相關遷徙情況[78]。
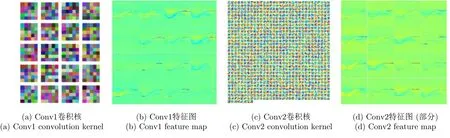
圖23 CNN中各卷積層的數據特征(以LeNet為例)[73]Fig.23 Data characteristics of convolutional layers in CNN (take LeNet as an example)[73]

圖24 基于深度學習的微動參數估計流程示意圖Fig.24 Schematic diagram of m-D parameter estimation based on deep learning
(a)基于多模型概率提取的目標運動模式判別與分類。除提取“信號”層面的目標微動特征之外,利用“數據”層面的目標飛行軌跡特征,同樣是區分飛鳥和無人機目標的有效技術途徑。通常情況下,無人機目標的飛行軌跡持續時間長且相對穩定,而飛鳥目標的飛行軌跡相對較短且靈活多變,可通過評估“數據”層面目標運動模型的變化情況區分飛鳥和無人機。圖25所示的算法通過提取出目標的運動模型轉換頻率特征,進而區分輕小型無人機目標與飛鳥目標。
圖26所示為利用飛行軌跡特征對飛鳥與無人機目標進行識別的結果,雷達實測數據中包含了一段時間內某機場凈空區自然活動的若干飛鳥目標與一架大疆精靈3無人機測試目標。其中,飛鳥目標多為本地留鳥,機動性高且飛行軌跡短。在工程應用中,無人機和飛鳥目標的分類閾值需要通過人工標記的方法進行驗證和設定,確保算法的識別效果。實際上,無人機的飛行軌跡也可能設計為機動且復雜多變,因此,該算法的適用范圍有待于進一步研究和驗證。
(b)鳥類活動節律分析。利用探鳥雷達獲取的機場鳥情數據,對不同時段的鳥類飛行軌跡數量進行統計,確定鳥類活動的高峰時段;在機場探鳥雷達的監視范圍內劃分網格,統計高峰時段內鳥類活動的網格分布情況,確定鳥類活動的主要區域,結合機場鳥情調研情況,為機場留鳥活動節律分析提供數據支撐。圖27和表2給出了某機場鳥類活動熱點分布情況[79],共統計出10個鳥類活動的熱點區域,每個區域記錄的月度軌跡數量和百分比見表2。其中,熱點區域10的面積最大,鳥類活動最活躍,其高峰時段出現在清晨和傍晚,因此,其屬于鳥類棲息地的可能性最大。其余9個熱點分布在飛行區內及機場周邊區域,面積較小,高峰時段出現在白天,屬于鳥類覓食或飲水地的可能性更大。機場管理機構可以結合機場實地鳥情調研情況驗證以上猜測,對相關區域開展生態治理,降低鳥擊風險。

圖25 基于雷達數據的飛鳥與無人機目標識別算法流程Fig.25 Target recognition algorithm of flying birds and UAVs based on radar data processing

圖26 飛鳥與無人機目標飛行軌跡識別結果[77]Fig.26 Recognition results of trajectories of flying birds and UAVs[77]
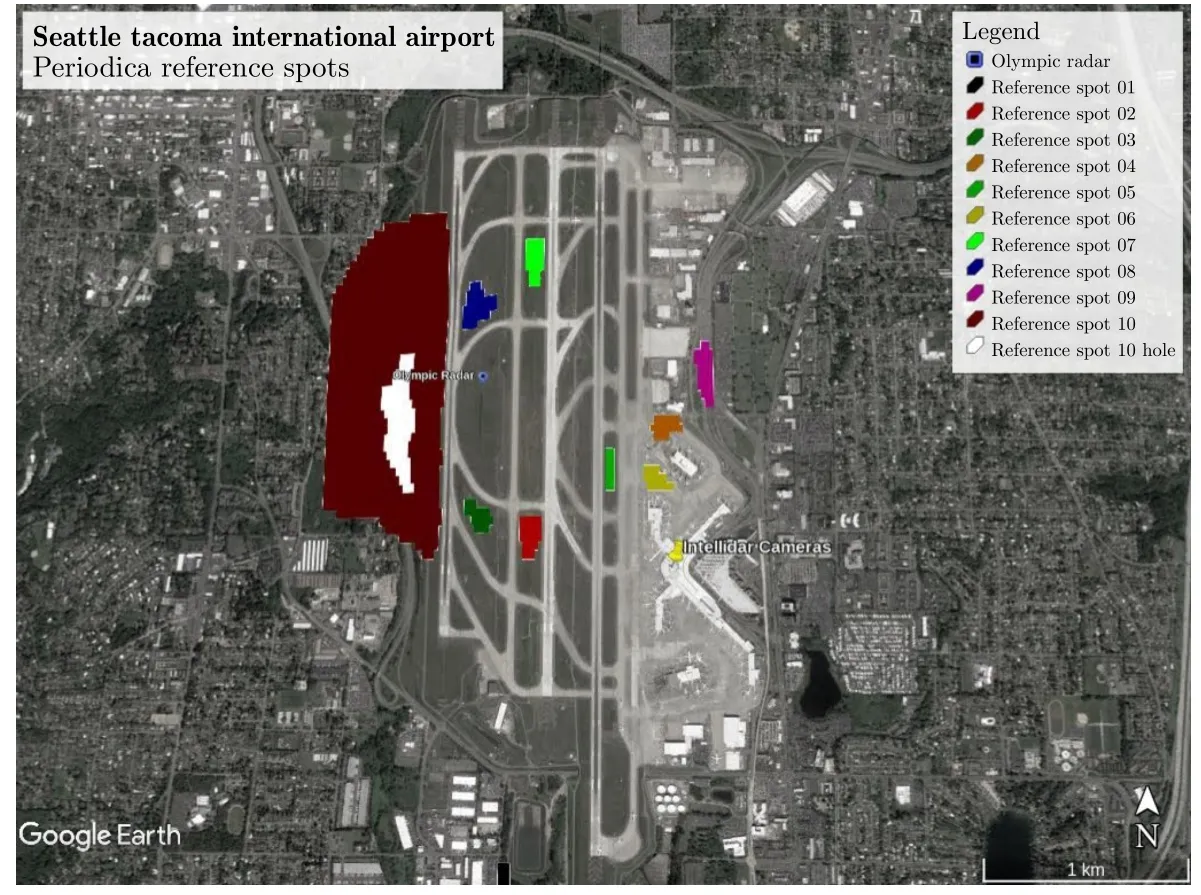
圖27 某機場鳥類活動熱點統計情況[79]Fig.27 Statistics of hot spots of birds activity at an airport[79]
2017—2018年,受民航局機場司委托,作者團隊對當前國內成熟的輕小型無人機目標監管技術進行了持續跟蹤調研,調研發現,目前國內研制的基于雷達技術的非合作無人機探測系統大多基于已有的軍事雷達或其他用途探測雷達的改進版,在探測和識別能力上與國際相比有很大欠缺,少量系統雖開發了識別功能模塊,但識別途徑和方法有限,多依賴于回波幅度和信號起伏變化,誤報率極高,經常發生將飛鳥誤識別為無人機的情況。基于傳統特征信息的雷達目標識別,特別是非合作目標識別變得困難甚至失效。基于研發的“機場雷達探鳥實驗系統”,初步驗證了變換域動目標檢測技術、長時積累技術以及運動模式差異分類技術,如圖28所示,獲得了國家重點研發計劃、國家自然科學基金民航聯合研究基金、山東省重點研發計劃、民航科技項目等多項課題的資助。2019年,民航局委托航科院啟動了《機場凈空區無人機探測技術標準》與《機場探鳥雷達系統技術標準》兩項行業標準的制定工作,將從標準層面規范飛鳥與非合作無人機目標的探測、識別與技術驗證。
4 現有研究存在的不足
由上述研究現狀可知目前實現飛鳥與無人機目標的分類和識別的主要途徑有:一是,采用長時間凝視觀測或泛探觀測模式,進而提高目標的多普勒分辨率;二是,利用無人機和飛鳥微動特征及差異是實現分類和識別的有效手段;三是,通過雙多基地雷達的觀測,雷達的多視角特性可以克服單基雷達姿態敏感性的局限及遮擋效應的影響,形成多視角資源互補,有助于提高分辨能力和特征提取精度;四是,采用深度學習智能分類和識別方法,將目標的距離多普勒圖以及時頻圖作為圖片進行學習,通過深度卷積網絡,對目標特征進行深度挖掘,實現精細化描述。目前該方向存在的主要問題和難點是:

表2 鳥類熱點月度軌跡數量統計Tab.2 Monthly statistics of bird hot spots
(1) 無人機與飛鳥目標建模及特性研究方面。理想狀態下,目標典型微動的特征與其微動頻率、微動幅度,徑向距離和觀測角度等因素相關,其隨時間的變化規律表現為正弦調頻(Sinusoidal Frequency Modulation,SFM)信號形式,因此在時頻圖像中也呈現出正弦變化規律。事實上,微動過程中散射中心位置、強度的變化還會對回波幅度進行非線性調制,因此在實際應用中還需要考慮目標姿態變化、目標形狀、回波不連續、遮擋效應等因素的影響[80,81]。另外,雷達發射信號參數也會對微多普勒頻率的觀測造成影響。此外,目標或目標部件還復合有多種微動形式,如鳥類目標等。目標的微多普勒不再服從簡單的正弦規律,而是表現為多個正弦分量的疊加。微動回波模型顯得更為復雜,也提升了后續特征提取的復雜度。
(2) 無人機與飛鳥目標特征差異提取方面。對無人機和飛鳥的差異特征提取是后續分類和識別的基礎和關鍵,兩者是典型的低可觀測目標,對其回波信號的預處理的好壞直接決定了特征描述的精細化程度。無人機目標類型多,具有不同的尺寸、形狀及運動特性,其雷達散射特性和多普勒特性也不盡相同。外輻射源雷達能通過長時間相干積累可提高多普勒分辨力,但其工作頻率較低,在目標精細化特征尤其是微動特征描述方面優勢并不突出,在復雜環境下實現高分辨的微動特征提取技術有待于進一步研究。此外,除提取“信號”層面的目標微動特征之外,利用“數據”層面的目標飛行軌跡特征,同樣是區分飛鳥和無人機目標的有效技術途徑。通常情況下,無人機目標的飛行軌跡持續時間長且相對穩定,而飛鳥目標的飛行軌跡相對較短且靈活多變,可以通過評估“數據”層面目標運動模型的變化情況探索飛鳥和無人機目標的分類識別方法。如何建立科學有效的飛行運動模型,并提出運動模式的判別準則和方法,這些都需要深入研究。

圖28 無人機和飛鳥目標外場探測試驗Fig.28 UAV and flying birds detection experiment
(3) 無人機與飛鳥智能分類識別方面。目前的CNN模型發展迅速,適用于各種應用的改進算法層出不窮,將CNN用于無人機和飛鳥目標的分類識別前提是構建不同類型的數據集,數據集的類型完備性和標注準確性直接決定CNN網絡學習的效果,因此仍需長時間開展不同條件下、不同目標的數據采集和標注。此外,如何將特征數據重構以適應深度學習模型輸入層、如何結合目標識別實際需求進行模型參數調優、如何利用輸出的差異特征進行場景辨識和目標識別方法設計,也是迫切需要解決的關鍵科學問題。
5 發展趨勢
(1) 雷達回波信號的精細化處理是提高檢測和識別性能的前提。以往的雷達目標探測技術研究,通常是只針對雷達回波數據,僅利用目標和背景的1階和2階統計分布特征、譜特征、空間相關特征以及目標勻速、勻加速運動特征,在事先假定的信號模型、目標模型、背景模型條件下開展檢測、跟蹤與識別算法設計。這種粗放型的做法能夠解決雷達探測中的大多數問題,但是隨著環境和目標的日益復雜,這種粗放型的做法日益明顯地阻礙了雷達探測性能的進一步提升[82]。必須從雷達探測所面對的目標和背景,從雷達探測所包含的雜波干擾抑制、檢測、跟蹤和識別等環節中進行精細化的分析與處理,提高信息的利用率,進而獲得雷達探測性能的改善[6]。
(2) 信號和數據特征融合是提高分類正確率的有效途徑。目標分類和識別最重要的前提是差異特征構建和提取。外輻射源雷達長時間的觀測模式易于提取高分辨的微動特征,能夠獲取無人機和飛鳥的精細信號特征,旋翼無人機和飛鳥目標的微動特征有明顯差異,這為分類和識別奠定了基礎。此外,大量的實驗數據表明,雷達獲取的目標數據中,無人機與飛鳥的運動軌跡具有一定的區分度。目前,成熟的目標跟蹤算法通過建立多種運動模型逼近目標的真實運動狀態,運動軌跡相對穩定的無人機目標在飛行過程的目標狀態一般符合單一的運動模型,而機動性較高的飛鳥目標在飛行過程中的目標狀態通常在多個運動模型直接切換。同時,大量的探鳥雷達數據分析表明,一定區域內的鳥類活動具有明顯的節律性。由此可知,通過評估目標運動模型切換頻率結合鳥類活動節律分析的方法進行目標識別分類是可行的。因此,融合利用無人機和飛鳥的信號和數據特征,能夠擴展差異特征空間,提高分類概率[77]。
(3) 深度學習網絡為無人機和飛鳥目標智能識別提供了新的手段。由于無人機和飛鳥復雜的運動形式和環境因素,其本質屬性有時難以用模型和參數的方式描述清楚,從而造成很難獲得目標數據深層本質特征。采用深度學習等智能學習的思路,通過構建多層卷積神經網絡,發現高維數據中的復雜結構,已在圖像識別和語音識別等領域經過驗證具有很強的特征表述能力和較高的分類識別準確率。深度學習的好處是用非監督式或半監督式的特征學習和分層特征提取高效算法來替代手工獲取特征。由于目標微動信號可以看做是時間-頻率的二維特征數據,目標回波和運動軌跡體現在雷達P顯畫面也是距離和方位(多普勒)的二維圖像[76,83],因此,采用深度學習來進行目標智能分類和識別是非常適合的。此外,僅用時頻圖得到的微動特征對無人機和飛鳥信號進行分類時利用的特征空間有限,準確率較低,為此,可采用多特征多通道CNN融合處理的思路,將目標的回波序列圖、微動時頻圖、距離-多普勒圖、變換域圖、運動軌跡圖等輸入多通道CNN,從而更好地運用卷積神經網絡來進行特征學習和目標辨識[76]。
(4) 新體制雷達為目標精細化處理和探測識別一體化奠定了硬件基礎。當前,雷達硬件技術,特別是硬件的計算能力和存儲能力的進步為雷達目標探測精細化、智能化信息處理技術的發展提供了堅實的硬件基礎;同時,數字陣列體制、外輻射源雷達、全息雷達、MIMO雷達、軟件化雷達、智能化雷達等新的雷達體制,擴展了可利用的信號維度,為雷達目標探測精細化、探測識別一體化處理提供了靈活的軟件框架[84]。例如,全息數字陣雷達、MIMO雷達等具有多波束凝視和泛探能力的雷達,能夠實現時域(跨距離、跨波束、跨多普勒的長時間相參積累)、空域(寬空域全數字波束形成全覆蓋)和頻域(長時間凝視改善多普勒分辨力,提取精細化運動特征)信息的聯合處理,從而實現“低慢小”等低可觀測目標的可靠檢測和識別[85—88]。外輻射源雷達利用第三方輻射源,本身不發射信號,無需專門申請頻率,具有成本低、綠色環保、無電磁污染的特點,在機場等電磁頻譜敏感區域的無人機監視尤具有獨特優勢。此外,復雜環境下,依靠雷達單一探測設備的目標識別概率都不高,需要綜合利用不同傳感器的信息,如光電、聲等,彌補單一傳感器的局限性,提高識別效率與精度。
6 結束語
本文對近年來復雜場景下飛鳥與無人機目標檢測和識別這一熱點研究領域的主要技術手段和系統進行了梳理和總結,分析了各自的優缺點,給出了數據仿真分析結果,并從信號精細化處理、信號和數據特征融合、深度學習智能識別以及新體制雷達發展等幾個方面,對未來實現有效監視和識別飛鳥和無人機目標進行了展望。由于飛鳥和無人機目標均屬于“低慢小”目標,回波具有低可觀測性,并且隱藏在復雜背景中,因此,對兩者的有效監視和識別也極大考驗和促進雷達新技術的發展和應用,相關技術也能夠為其它復雜背景下的弱小目標探測提供思路。期望更多的學者能夠對此領域進行深入研究,尋找更好地提高飛鳥和無人機目標探測和識別能力的方法和手段。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
中國生殖健康(2019年3期)2019-02-01 06:12:26
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00