基于模糊PID和單片機的溫度控制系統設計
2020-10-27 06:08:43傅以盤
中國電氣工程學報 2020年12期
關鍵詞:單片機
傅以盤
摘要:溫度控制系統在多種類型的生產設備上都有應用,并且系統運行效果直接決定著生產設備的運行穩定性與安全性,因此有必要優化和改良溫度控制系統設計,提高系統運行效果。基于此,本文介紹了一種基于模糊PID和單片機的溫度控制系統設計,從硬件設計和軟件設計兩方面入手,對溫度控制系統設計進行了全面分析和介紹。
關鍵詞:模糊PID;單片機;溫度控制系統;硬件;軟件
引言:模糊PID是一種現行控制,其核心基礎為PDI算法,將誤差e和誤差變化率ec作為輸入,利用模糊規則進行模糊推理,從而通過查詢模糊矩陣表去調整參數,以此滿足不同時刻e和ec對PID控制的參數自整定要求。基于模糊PID和單片機的溫度控制系統設計可以實現對溫度的彈性控制,境地溫度信號延遲以及滯后,進而使得溫度控制系統模型更加穩定,提高溫度控制系統的控制效果。
一、溫度控制系統硬件設計
(一)系統硬件電路設計
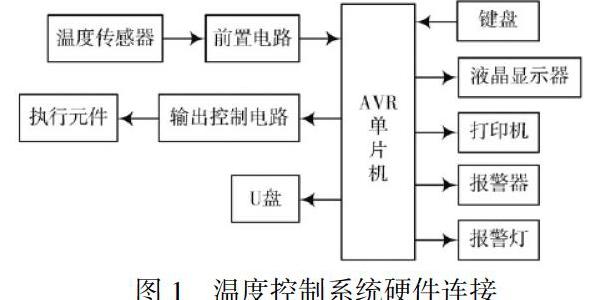
基于模糊PID和單片機的溫度控制系統設計基于傳統的溫度控制系統,系統硬件電路大體一致,可以分為八個部分,分別為單片機控制模塊、溫度檢測模塊、電源穩壓模塊、溫度設定模塊、過零檢測模塊、驅動控制模塊、溫度蜂鳴報警模塊以及溫度LED現實模塊。需要根據溫度控制系統實際應用需求以及所要達到的
控制效果進行合理設計,構建一個完整且運行高效的系統硬件電路[1]。溫度控制系統硬件連接方式如圖1所示。
(二)溫度傳感器選擇
基于PID和單片機的溫度控制系統設計主要設備包括傳感器、控制儀表、單片機等。其中,在選擇溫度控制系統傳感器的時候,要選擇結構加單、可好性高的新型智能溫度傳感器,例如美國DALLAS半導體公司研發并推出的單總線器件DS18B20傳感器,具有“一線總線”以及經濟適用等特點,可以更加容易組建傳感器網絡。該傳感器的溫度控制范圍在-55℃到125攝氏度之間,在-10℃到85℃區間范圍內可以達到±0.5℃的測量精度。智能型溫度傳感器采用了符號擴展的16位數字量方式,實現了串行輸出,溫度控制系統的抗干擾性得到了極大提升,可以適用于多種惡劣操作環境。
(三)溫度控制系統儀表功能要求
溫度控制系統的儀表選擇要具備以下幾種功能要求:第一可以認為調整控制溫度值,溫度儀表可以自動加熱到設定溫度并開啟溫度保持。第二可以獨立實現測量電爐溫度,無需其它輔助設備支撐。第三要具備較高的運行可靠性,需要適應多種工作環境,降低故障率。第四要具備自動加熱保護功能,提高儀表使用安全性,即在電爐實際溫度超過設定溫度時,溫度控制儀表需要自動檢測溫度異常情況并做出斷電指令,做好超溫保護。第五是儀表拆裝、檢修方便、快捷,掌握基本電子知識的工作人員在閱讀使用說明書后均可自行完成安裝或者維修[2]。
二、溫度控制系統軟件設計
(一)溫度控制系統軟件設計流程
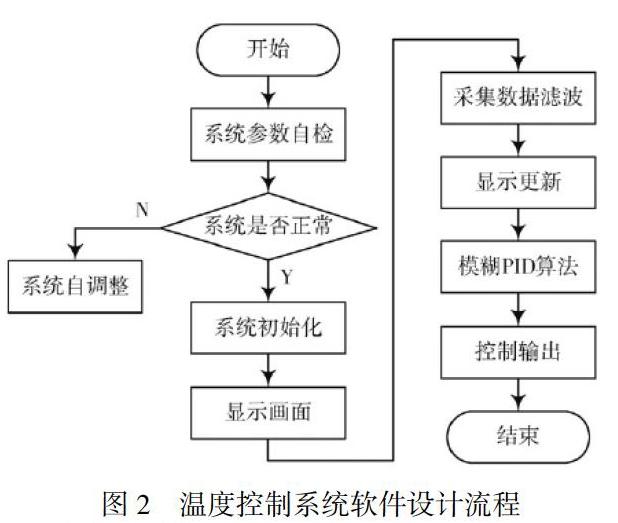
基于模糊PID和單片機的溫度控制系統軟件設計使用了模塊化思想,將系統軟件分為了數據采集、數據輸出、數據交互以及人機交互操作四個大的模塊。其中,數據采集模塊作為溫度控制系統軟件設計的基礎模塊,采用了AVR單片機自帶的A/D轉換器,需要將模擬PID的模擬量轉換為數字形式,并對數字形式的信號進行濾波處理。而輸出模塊的設計則采用了模糊PID算法,通過分析和整理采集到的數據值,結合系統操作者設定的溫度數值,對其進行整體計算,并通過AVR單片機的A/D轉換器將其轉換為模擬量。溫度控制系統的數據交互模塊主要是利用單片機自帶的USB接口直接連接到單片機的芯片上,進而得到U盤中的數據。溫度控制系統的人機交互操作模塊就是為了實現鍵盤、顯示器以及打印機之間的數據轉換和處理。溫度控制系統軟件的工作流程為開始-系統參數自檢-系統初始化(系統自調整)-顯示畫面-采集數據濾波-顯示更新-模糊PID算法-控制溫度輸出-結束。溫度控制系統軟件設計流程如圖2所示。
(二)溫度控制系統模糊化處理
基于PID和單片機的溫度控制系統的模糊化處理,首先需要通過系統將獲取的信號進行數字化轉換,然后將操作人員根據生產需求設定的溫度值輸入到語言變量溫度差中,并與偏差變化率進行對比,最后將輸出的信號變量作為PID參數進行調節,進而實現模糊化處理。在進行模糊化處理的過程中,需要設置偏差的基本論域和偏差模糊集合論域。其中,模糊偏差變化率基本論域是偏差所取范圍內的集合,需要通過計算獲取偏差精準量,并將得到的精準量進行離散處理,離散后的數據量具有連續性特點,可以進行檔數等級劃分。為了實現模糊化處理,在處理中需要將輸入量從基本論域轉化為模糊集合論域,并在量化因子的支持下完成。經過模糊PID處理過的輸入值和輸出值可以組成包括負大、負中、負小、零、正小、正中以及正大的模糊子集,并以此為基礎可以繪制成函數曲線。
(三)溫度控制系統模糊計算與運行規則
在進行溫度控制系統模糊計算和應用時,為了獲得更好的動靜態特性,需要在不同輸入區域內使用模糊PID算法設置不同的參數,提高溫度控制系統運行穩定性,并且需要從系統持續響應時間和穩態精準度的角度出發,通過調節溫度控制系統運行參數的方式其影響整個系統的性能,提高溫度控制效果。一般情況下,模糊PID溫度控制的原則有三個,第一是如果溫度數值偏差較大時,溫度控制系統需要加快響應速度,以此縮短持續響應時間,預防偏差出現。在出現偏差以后,溫度控制系統就會因為過分飽和導致控制失效問題,因此在選取PID參數時,需要選取一個較大參數作為上限,并以一個較小參數作為下限,另選一個參數為0[3]。第二個規則是在偏差和偏差變化率都在中等大小時,為了保證溫度控制系統的可控范圍保持不變,需要保證響應速度一致,因此需要選取兩個較小參數和一個中等參數值。第三個規則為數值偏差較小時,為了提高溫度控制系統的運行穩定性,需要選擇兩個較大的參數值。另外,為了區別輸出響應值和設定值,需要提高溫度控制系統的抗干擾能力,在偏差率較小的情況下需要選擇最大值作為參數,偏差率較大時,參數應該選擇最小值。
三、結論
總之,基于模糊PID和單片機的溫度控制系統設計需要結合傳統的溫度控制系統結構,利用先進的設計理念和技術,充分利用模糊PID算法,發揮出模糊PID算法的優勢,提高溫度控制系統的運行智能化和靈活性,實現數據實時采集、處理,溫度智能控制,控制結果實時顯示等功能,進一步提高溫度控制系統運行效果,優化系統工藝,簡化系統操作流程,增加經濟效益。
參考文獻:
[1]劉家琪,劉嵩,韋亞萍,李坤,張齊松.基于單片機的PID溫度控制系統設計[J].湖北民族學院學報(自然科學版),2019,37(02):219-222.
[2]王欣峰,任淑萍.基于模糊PID的AVR單片機智能溫度控制系統設計[J].現代電子技術,2018,41(15):179-182+186.
[3]童宥維,孫歆鈺.基于模糊PID的通用中檔單片機溫度控制系統設計[J].信息通信,2016(08):78-79.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
