基于RSSI的無線傳感器網絡室內定位算法研究
2020-10-28 01:44:02張玲華
計算機技術與發展 2020年10期
黃 威,張玲華
(南京郵電大學 通信與信息工程學院 江蘇省通信與網絡技術工程研究中心,江蘇 南京 210003)
0 引 言
定位在許多應用中起到了關鍵作用,比如地理導航,位置感知數據處理。近年來,許多定位技術被提出,比如藍牙技術、Wi-Fi技術、超聲波定位技術、紅外線室內定位技術、射頻識別技術以及新型的超寬帶技術等。應用較廣的是Wi-Fi技術和藍牙技術,因為可以直接利用室內已有的Wi-Fi和藍牙設備,實現比較容易。但是,由于Wi-Fi和藍牙信號易受環境干擾,信號不穩定,而其他方法對設備要求較高,算法較為復雜,因此目前仍無法大面積推廣。
無源室內定位則不需要攜帶有源設備,進入無線環境的人或者物體因為會改變環境,都將會被偵測到。無源室內定位具有很好的應用前景,比如偵測室內入侵、工業財產設施保護、定位被困室內人員以及老年養護等[1-3]。所以無源室內定位近年來吸引了很多人的注意。基于RSSI的無源室內定位,由于布置簡單,低花費而受到廣泛研究。這項技術通過測量各個節點之間接收信號的強度改變來進行識別定位[4-7]。
Youssff等[3]通過Wi-Fi設備可以偵測到單個入侵者,其偵測率較高,假陽性結果較小。Zheng等[8]提出適應性的框架結構從而在室內環境中偵測出變速物體。作者進行了一系列實驗,測試了不同速度對定位精度的影響,從而提高了不同速度的定位準確性。Ahmed等[9]提出了一種新型的無線環境下的室內無源定位系統。提供了低開銷,準確和穩健的運動檢測,并給出了跟蹤能力。Seifeldin等[10]提出了大規模室內無源定位和追蹤。在多徑效應下,它的定位精度相對較高。Xu等[11]更好地描述了無源定位的本地化分類模型,改進了數據集的質量,并且減少了多徑效應引起的誤差。Zhang等[12]提出了三種無源室內定位方法,并且討論到了多目標對結果產生的影響。文獻[13-14]中用到的基于RSS的在實際應用中的定位,該方法因為路徑損耗模型的多樣性,而導致算法顯得極不可信。而在文獻[15]中提出了基于RSSI的側向定位方法,他們認為用RSSI來提高室內定位的精度,數值計算方法是非常重要的。
以上研究中基于RSSI的WSN無源室內定位都是定位單目標,或者是多目標成群同時移動。然而,在現實場景中,大多數的情況都是多目標分別移動,這樣就需要進行多目標定位。張子博等[17]提出了利用WIFI技術實現室內多目標定位,可以在短距離內較準確地推算出用戶位置,但長時間后會出現誤差累計的現象。所以該文利用RSSI,在室內的特定位置擺放發射器和接收器,當目標出現在無線環境中,接收信號強度的方差值將進行大幅度變化。如果發射器和接收器的數量較多,目標將會改變多條鏈路,該文提出權重鏈路最小誤差定位法和異常鏈路選取法,完成多目標定位。權重鏈路最小誤差法,是通過鏈路接收信號的強度方差值,給鏈路賦予權重。通過仿真,發現該方法有效并可以用于大型室內定位系統。
1 RSSI時間窗方差偵測
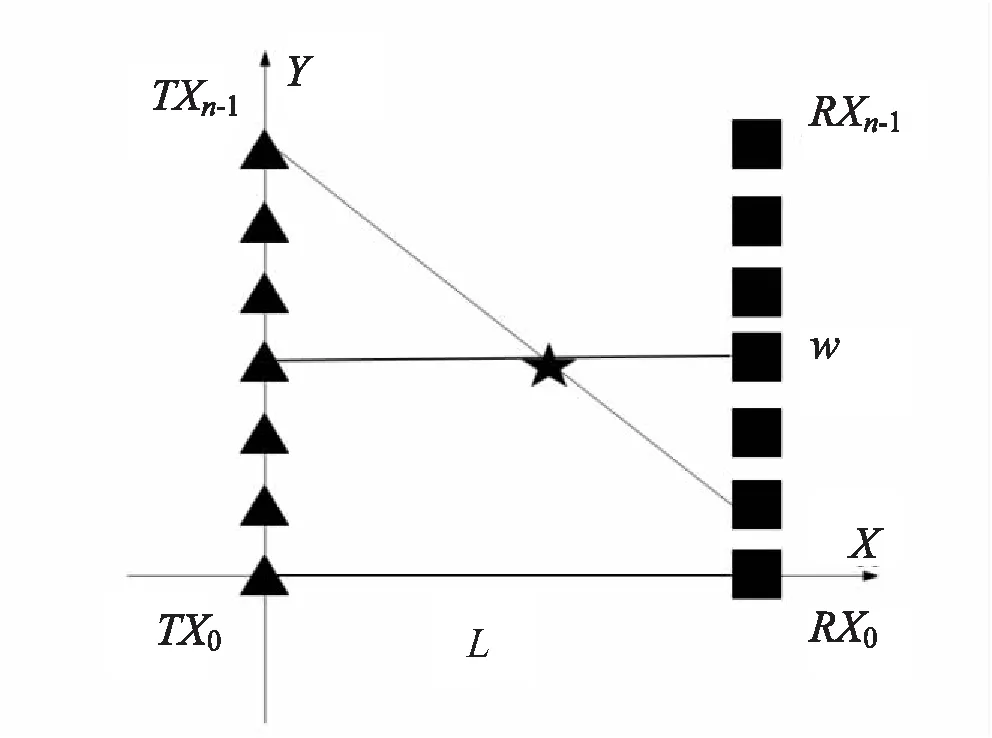
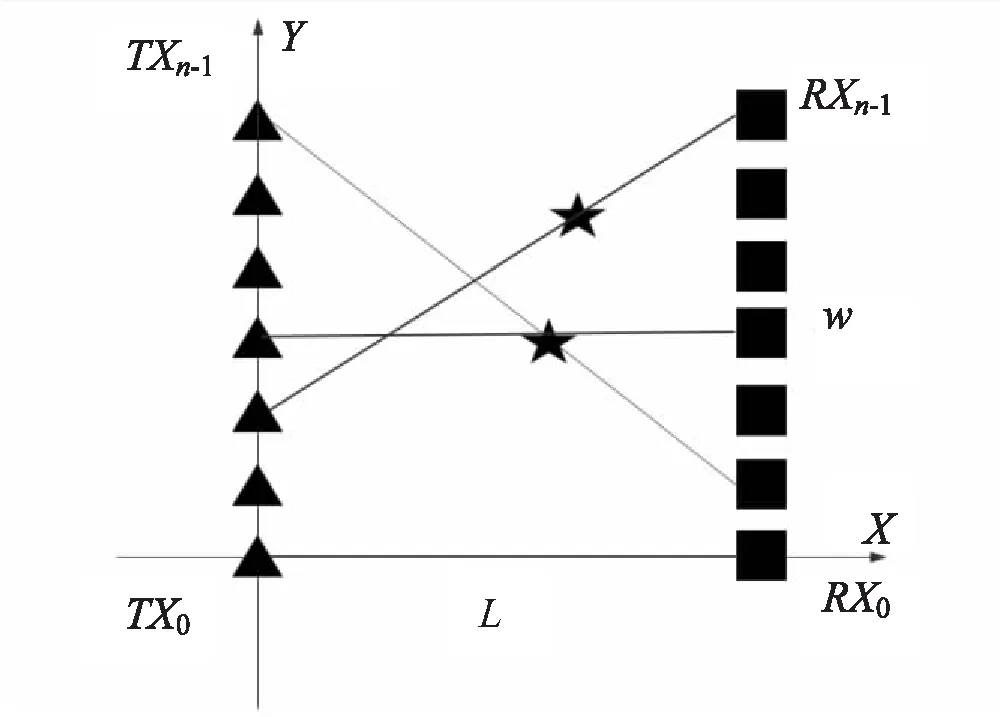
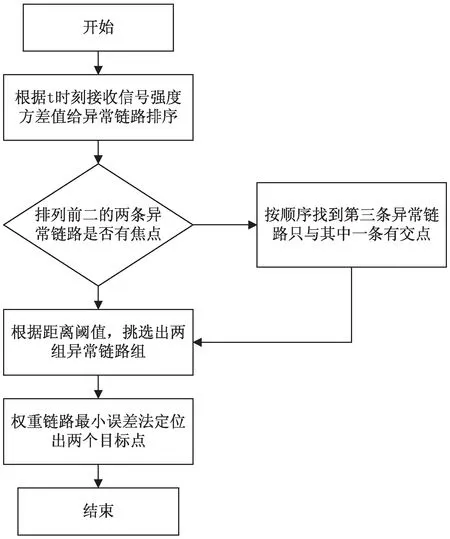
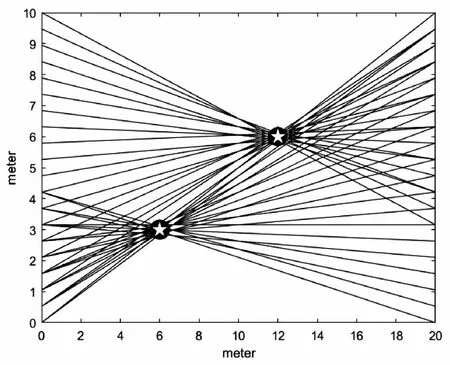
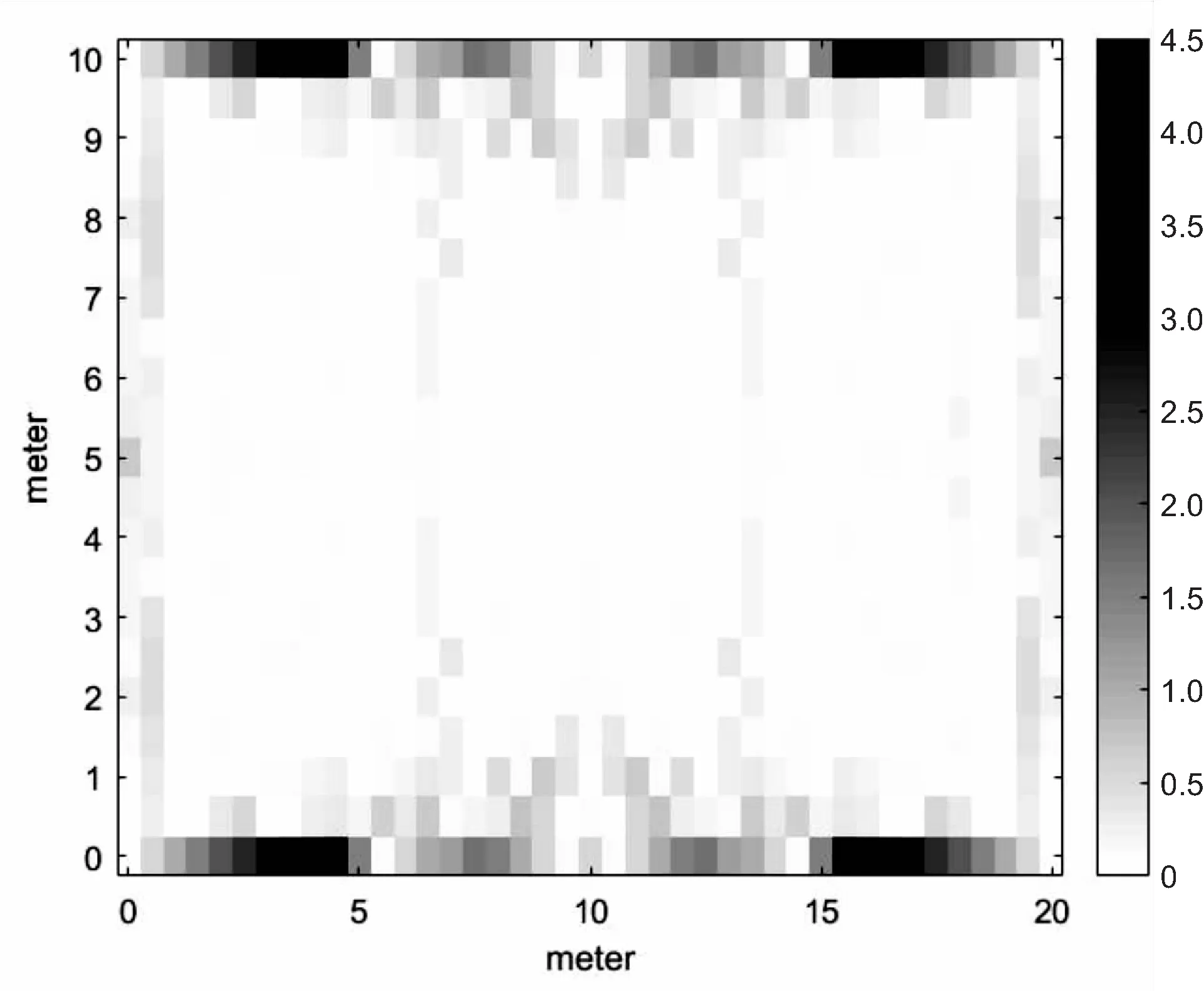
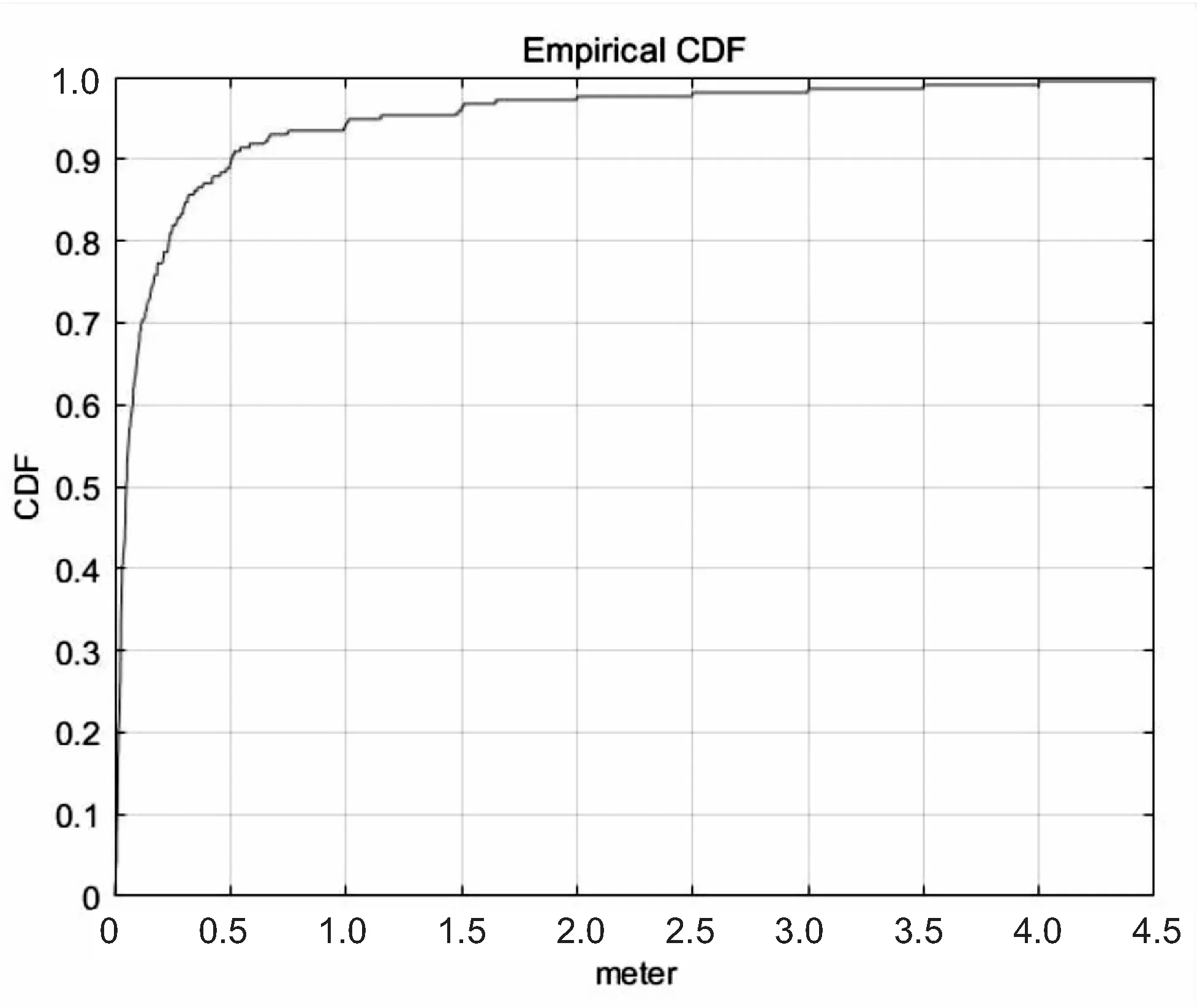
每個接收器和發射器之間的連線就是無線鏈路。將發射器和接收器分別取做TXi和RXi,這里0 定義rl,T(i)為第l個鏈路上在時間窗T內的第i個接收信號強度樣值。通過rl,T(i)值計算接收信號強度方差。方差值公式如下: (1) 在長為Lm,寬為Wm的室內兩邊分別擺放上n個發射器和n個接收器,相比于Li等[16]提出的把房間分割為兩部分的方式,該文認為只需要在房間左右擺上信號發射和接收裝置即可,結果如圖1所示。 圖1 發射器、接收器位置擺放 首先介紹基于最小二乘法的單目標最小誤差定位。預估的結果將會成為后續優化運算的基礎。然后,提出基于單目標最小誤差定位和預估目標與異常鏈路距離測量的權重鏈路最小誤差定位法。最后,在權重鏈路最小誤差定位法和異常鏈路選取的基礎上,提出多目標定位。 如圖1設定的坐標系中,在Y軸的左右兩邊,有兩列平行于Y軸的發射器和接收器。同一排的接收器和發射器之間的距離相同,同一列不同排的接收器或發射器之間的間隔相同。因此將所有發射器、接收器的坐標定義為: (2) (3) (4) 對于每個目標,當有鏈路的方差值超過閾值時,用上式表示異常鏈路。通常情況下,由于目標的體積和運動,目標會影響不止一條鏈路。N條鏈路的統一表達式為: aix+biy=ci,i=0,1,…,N (5) 定義矩陣A和矩陣C: (6) (7) 則式(5)可以表示為: (8) 目標的坐標可以被預估為: (9) 此坐標為優化定位的基礎。由于上式中的結果太過理想化,現實中目標與異常鏈路之間的距離會對方差值造成很大的影響。因此,文中提出通過距離給異常鏈路賦予權重的修正方法。 異常鏈路的權重是由式(1)中接收信號強度方差值決定的,首先根據接收信號強度方差值給異常鏈路排序,從大到小排序,序號從1到N。例如接收信號強度方差值最大的鏈路就賦予編號1,第i個就賦予編號i,然后根據Sigmoid函數[8]賦予權重: (10) 此外,為了提升計算機運算效率,首先通過式(9)中的單目標最小誤差定位法得到一個初始位置,然后集中在初始位置附近。通過權重鏈路最小誤差算法可以找到一個最優化坐標,這個坐標到附近的異常鏈路距離總和最少,這個坐標也是需要定位的坐標。 算法1:權重鏈路最小誤差定位法: (1)(x,y)←式(9)中得到的點為圓心半徑為0.3 m內測試所有點。 (2)di←點(x,y)距離各個異常鏈路的距離。 (3)wi←根據接收信號強度方差值賦予權重。 的累積值。 (5)搜尋范圍內的每個點,得到所有情況的p值。 (6)找到最少的p值對應的坐標,即為最優坐標。 假設兩個目標不是聚在一起行動,如圖1所示,星星表示需要定位的目標。首先,找出所有的異常鏈路,然后進行排序。將異常鏈路區分為兩組的方法步驟如下: 首先,選出接收信號強度方差值最大的兩條異常鏈路。情況1:如果有交點,則把它們放入組1。情況2:如果沒有交點,則把它們分別放入組1和組2。 情況1:如圖2,這種情況下,前兩條異常鏈路都被分在組1。首先,找到這兩條異常鏈路的交點,然后,計算這個交點到其余剩下的異常鏈路的距離。如果距離小于閾值,則將其放入組1,否則,將其放入組2。 圖2 情況1 情況2:組1組2中都有一條異常鏈路,通過搜尋異常鏈路方差值排第三的異常鏈路,決定第三條異常鏈路該被分到哪一組時,出現了兩種可能性: 可能性1:如圖3,第三條異常鏈路只與組1或者組2的其中一條有交點,利用這個交點和情況1中的方法,就可以分出兩組異常鏈路組。 圖3 情況2-可能性1 可能性2:如圖4,第三條異常鏈路與前兩條鏈路都有交點,那先把這條異常鏈路放入組3。然后按順序尋找其他鏈路,直到找到一條鏈路只與組1或者組2其中一條異常鏈路有交點。然后再用可能性1中的方法,完成鏈路分組,包括組3中的異常鏈路。 圖4 情況2-可能性2 這個過程把異常鏈路分為兩組,然后用權重鏈路最小誤差定位法分別去定位目標即可。 算法2:異常鏈路選取與權重鏈路最小誤差法。 (1)aix+biy=ci←通過接受信號強度方差值從大到小排序。 (2)(x,y)←找到排在第一位和第二位的異常鏈路交點。 (3)如果沒有交點,則在剩余的異常鏈路中,按順序找到一條異常鏈路只與前兩條中的一條有交點。 (4)組1←挑選到(x,y)距離小于閾值的異常鏈路。 (5)組2←剩余的不屬于組1的異常鏈路。 (6)通過權重鏈路最小誤差定位法分別定位這兩個目標。 算法流程如圖5所示。 圖5 算法流程 用MATLAB對算法進行仿真分析。首先,將估計的點坐標與真實點坐標進行對比,從而得到定位的準確性。結果表明物體和鏈路之間的距離可以反映出接收信號強度值,如果某條鏈路在某一時刻接收信號強度方差值大,說明物體離該鏈路比較近,反之則說明物體離該鏈路比較遠。其次,給方差值增加了一個在-0.5 m到0.5 m的值,用來模擬環境中的各種干擾。 如圖1所示,在長L=20 m,寬W=10 m的房間兩側分別放上20個接收器和20個發射器。定位結果如圖6所示。 圖6 仿真定位結果 其中,黑色的圓點代表隨機取得兩個需要定位的點,白色的星星是經過初級定位,然后結合異常鏈路選取與權重鏈路最小誤差定位法定位出的目標點。 假設一個點靜止,另外一個點全圖遍歷房間各個坐標點。該文通過計算坐標點與實際點的距離,來表示誤差的大小。如圖7,顏色棒表示了距離的遠近。顏色越深,距離越遠,顏色越淺,距離越近。圖8展示了誤差的CDF曲線,從圖中可以看出,誤差<0.5 m的點占所有點的90%。相比于文獻[6]中的仿真結果,提高了近20%。 圖7 誤差分布表 圖8 累積誤差分布圖 通過無源室內定位去定位分布在室內不同位置的兩個目標。在室內的左右兩邊布置發射器和接收器。然后通過結合最小誤差法和權重鏈路挑選,最終定位目標。通過MATLAB仿真,發現定位結果精度比參考文獻高出20%。而且,沒有考慮多徑效應、雜物以及更多目標對接收信號強度和算法的干擾。在文獻[18]中為了提高室內定位系統的性能,提出了一種利用無源RFID技術定位目標物體的算法。文中的定位算法只考慮了二維平面,沒有探究三維坐標下的定位情況。在之后研究中,將會把2維平面升級到3維立體空間,繼續研究基于RSSI的室內定位。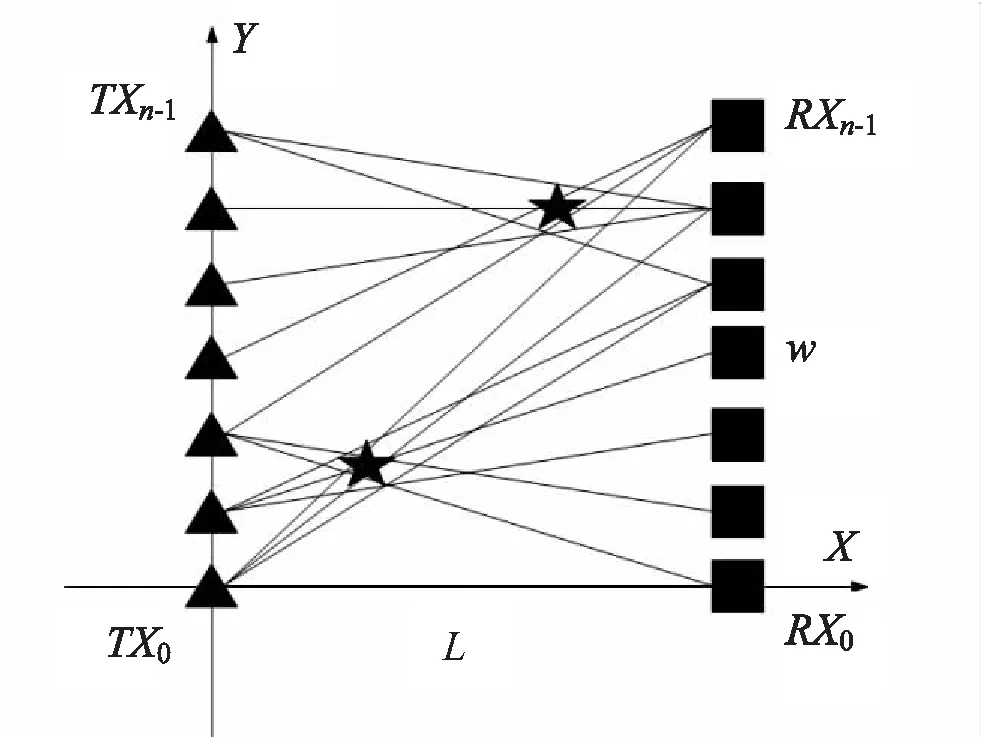
2 多目標定位
2.1 單目標最小誤差定位法



2.2 權重鏈路最小誤差定位法

2.3 區分異常鏈路

3 仿真結果
4 結束語