AMT預測駕駛功能系統構建時間分析研究
2020-10-28 01:36:44何發堯李昕昕
汽車實用技術 2020年18期
何發堯 李昕昕


摘 要:經濟性是商用車的重要評價指標 機械式自動變速器(AMT)可通過科學的換擋策略有效降低整車油耗 搭載預測駕駛功能的AMT可進一步提升車輛的經濟性。由于預測駕駛功能數據采集系統的配置等原因 車輛有可能會在道路交叉口等位置丟失正確的預測數據。文章依據ADASIS v2協議 通過e-Horizon Box采集數據并按協議重構數據 分析研究國內集成式AMT搭載的傳動鏈預測控制系統在道路交叉口所需的系統構建時間問題。分析研究表明 預測系統僅需數秒即可完成系統構建 在該時間段內制定相應的策略即可避免由于丟失正確的預測數據造成的相關問題。
關鍵詞:商用車;機械式自動變速器;傳動鏈預測控制;系統構建
中圖分類號:U471.15? 文獻標識碼:A? 文章編號:1671-7988(2020)18-63-03
Abstract: Economy is an important evaluation index of commercial vehicles. The mechanical automatic transmission (AMT) can effectively reduce the fuel consumption of the vehicle through scientific shifting strategy, and the AMT with Predictive Driving function can further improve the vehicle economy. Due to the configuration of the PPC function data acquisition system, vehicles may lose the correct predictive data at road intersections or other locations. This paper collects data through e-horizon Box and reconstructs the data according to the protocol to analyze and study the system Build-Up time of AMT with PPC function based on ADASIS v2 protocol. The result shows that the prediction system only needs a few seconds to finish system Build-Up, and the relevant problems caused by losing the correct prediction data can be avoided by formulating the corresponding strategies in this period.
Keywords: Commercial vehicle; AMT; PPC; System Build-Up
CLC NO.: U471.15? Document Code: A? Article ID: 1671-7988(2020)18-63-03
1 前言
經濟性是商用車的重要評價指標 追求低油耗是廠商和用戶的共同目標。機械式自動變速器(AMT Automated Manual Transmission)可通過科學的換擋策略有效降低整車油耗 搭載預測駕駛功能的AMT可進一步提升車輛的經濟性。目前國內外已有數家整車企業或變速器等零部件企業開發出了帶有預測駕駛功能的產品。國際上 推廣程度最高、用戶最受歡迎的產品或系統有I-See(沃爾沃)、Prevision(采埃孚)及Active Prediction(斯堪尼亞)。而在國內 工程師在最新一代集成式AMT中研發了傳動鏈預測控制技術(PPC Predictive Power-train Control)。預測駕駛功能需要通過GPS接收內容供應商提供的地圖數據來識別車輛前方道路信息 從而控制車輛或變速器等子系統做出最優選擇。然而由于數據采集設備配置或者成本等原因 預測數據提供方(Av2HP ADASIS v2 Horizon Providers)并不能將車輛前方所有道路的數據全部發送給控制器 尤其是在道路交叉口 當預測數據和車輛實際行駛路徑不一致時 預測駕駛系統就需要一段時間來重新構建。本文基于國內最新一代集成式AMT搭載的PPC功能 從ADASIS v2協議入手 分析研究預測駕駛功能系統構建時間(Build-Up Time)問題。
2 系統構建時間分析研究
2.1 ADASIS協議道路屬性研究
ADASIS協議在預測數據提供方Av2HP和數據重構方Av2HR(ADASIS v2 Horizon Reconstructor)之間建立了溝通的橋梁 使預測數據采集和數據重構更加簡單和高效。
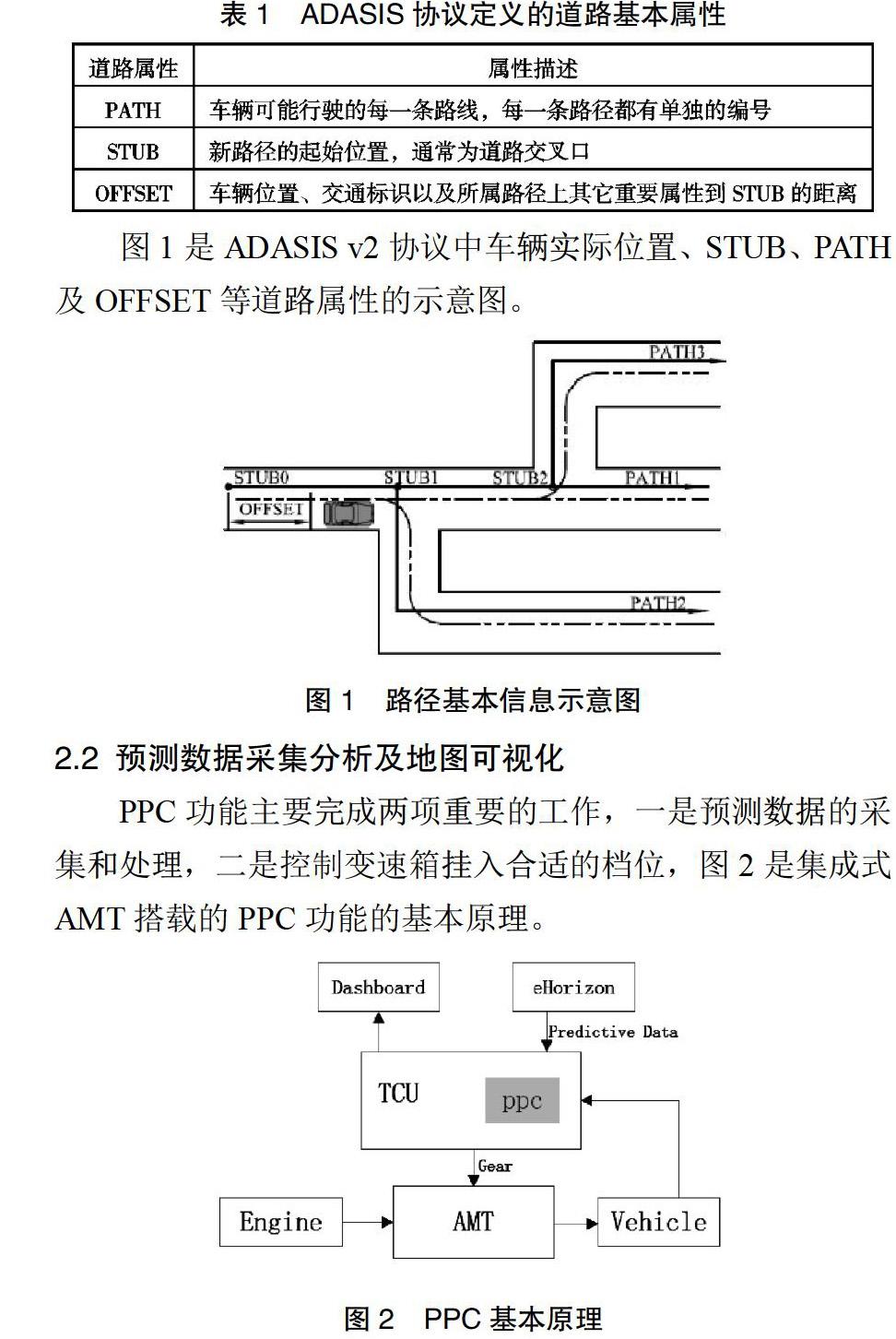
2.2 預測數據采集分析及地圖可視化
PPC功能主要完成兩項重要的工作 一是預測數據的采集和處理 二是控制變速箱掛入合適的檔位 圖2是集成式AMT搭載的PPC功能的基本原理。
PPC功能依據ADASIS V2協議采集和處理數據 由于國內地圖數據尚未公開 本文處理的數據是從奧地利Steyr到Hinterstode路段采集的數據。
文中使用的數據主要通過圖3所示的e-Horizon Box和CANalyzer等設備采集。e-Horizon Box接收GPS信號按照ADASIS協議發送預測數據 CANalyzer采集CAN線上由e-Horizon發送的數據。
本文將接收到的由e-Horizon Box采集并發送在CAN總線上的數據按照ADASIS v2協議重構 借助谷歌地圖API將重構后的預測數據和車輛實際位置在地圖上顯示 圖4是所采集路段的車輛路徑信息。
2.3 預測駕駛系統構建時間分析
通常情況下 Av2HP應當考慮并計算車輛可能行駛的所有路徑 然而由于設備配置、存儲空間或成本等其它原因 部分設備僅僅能夠發送主路徑上的數據信息。但是由于駕駛的隨機性 如果車輛因為岔路口等原因突然離開了主路徑 而預測系統繼續發送主路徑的道路信息 預測系統就會有一段陷入盲區(blind)的過程 直到接收到可用的新路徑的信息。預測系統需要從丟失信息到重新接收到可用的信息的過程中重新構建。
本文采集處理的數據 在圖4黑色圓圈處 由于道路交叉口 車輛實際位置和預測數據發生了偏離 在時刻822.405s處 車輛向右轉彎 預測數據繼續在原來的路徑上;在時刻824.975s處 新路徑的預測數據成功追趕上車輛的實際位置 如圖6所示。由此得出預測系統構建時間大約需要2.57s。
3 結論
預測駕駛功能根據前方道路信息優化車輛或變速器等子系統的控制策略 可以有效降低車輛油耗 提高經濟性。然而由于數據采集及處理系統的配置或成本等原因造成的預測駕駛系統重新構建問題 根據本文分析研究 系統所需的構建時間基本在十秒以內 預測駕駛系統控制策略在道路交叉口等敏感位置做出相應處理即可避免由于預測數據和車輛實際位置發生偏離的情況帶來的相關問題。
參考文獻
[1] 余志生,汽車理論[M].北京:機械工業出版社,2009.
[2] 劉子玄,劉會神,苑衛松,等.基于整車經濟性的商用車傳動系統匹配設計[J].研究與開發,2018(5):37-40.
[3] 嵇道君,付金.重載運輸智能駕駛技術研究[J].技術與市場,2020(2): 45-46.
[4] 趙立軍,張艷芬,劉清河.純電動商用車機械式自動變速器綜合換擋策略[J].西安交通大學學報,2015(6):46-52.
