基于Simulink的半主動懸架PID控制與Fuzzy-PID控制仿真
2020-10-28 01:36:44朱玉剛李江波史晨路
汽車實用技術 2020年18期
朱玉剛 李江波 史晨路


摘 要:文章基于在Matlab/Simulink對某車型建立二自由度四分之一半主動懸架模型 結合隨機路面激勵對PID控制和Fuzzy-PID控制策略進行仿真 從而改善車輛舒適性和操縱穩定性。PID控制以被控對象的偏差作為輸入 經過比例 微分 積分過后得到控制量 控制簡單 應用廣泛 Fuzzy-PID是在PID控制基礎上結合模糊控制 可以對存在非線性、多時變等較難建立精確數學模型的被控系統取得較好的控制效果。仿真結果表明:相較于被動懸架系統 兩種控制策略的半主動懸架系統均改善了懸架性能 并且Fuzzy-PID控制效果明顯優于PID控制并且具有良好的自適應能力。
關鍵詞:半主動懸架;Simulink仿真;PID控制;Fuzzy-PID控制
中圖分類號:U467? 文獻標識碼:A? 文章編號:1671-7988(2020)18-152-05
Abstract: This paper was based on Matlab/Simulink to establish a two-degree-of-freedom 1/4 semi-active suspension model of a vehicle. Combined with random road excitation, the PID control and Fuzzy-PID control strategy were simulated to improve vehicle comfort and ride handling. PID control takes the deviation of the controlled object as input, and obtains the control quantity after proportional, differential, and integral integration, this control is simple and widely used. Fuzzy-PID is based on PID control and combined with fuzzy control, which can achieve better control result for controlled system that have nonlinearities、multiple time changeand other difficult to establish accurate mathematical models. The simulation result show that the semi-active suspension system with both control strategies could improve the suspension performance compared to the passive suspension system, and the effect of Fuzzy-PID control is obviously better than PID control and has a good adaptive ability.
Keywords: Semi-active Suspension; Simulink; PID control; Fuzzy-PID Control
CLC NO.: U467 Document Code: A? Article ID: 1671-7988(2020)18-152-05
前言
隨著汽車技術的發展 人們對于車輛舒適性和操縱穩定性的要求越來越高 半主動懸架技術的研究逐漸引起人們的重視[1]。智能控制方法在懸架控制方面已廣泛應用。PID控制是半主動懸架系統中較為泛用的控制方法 PID控制器由比例 積分 微分三大部分組成 因其控制結構和算法簡單易于實現 應用范圍廣 在面對一些控制對象復雜狀況是適用性強[2]。但在面對擁有時變 動態特性和非線性特性的系統中PID控制并不能進行理想的控制。在設計過程中一般將一些能夠克服其技術缺點的控制技術融合到PID控制技術中 從而形成一種可以達到理想控制效果的控制技術。[3]
傳統的控制方法在進行半主動懸架等具有非線性 非時變特性的系統的控制策略的研究時 很難達到理想的控制效果。為了在非線性 多時變系統中建立較為精確的數學模型并達到良好的控制效果 模糊控制理論的加入十分重要[4]。通過PID控制與Fuzzy算法的結合可以實現參數的動態調節 忽略汽車行駛過程中懸架系統參數的變化 達到更好的控制效果 從而改善汽車行駛平順性。
本文以二自由度半主動懸架系統為研究對象 通過simulink進行仿真模型搭建。以路面白噪聲模型作為模型激勵輸入以輪胎動載荷、懸架動撓度、車身垂向加速度作為懸架性能改善的主要性能指標 搭建了PID控制模型和Fuzzy-PID半主動懸架控制模型 并且與普通被動懸架性能進行對比 研究兩種控制方法對被動懸架性能的改善。
1 建立二自由度1/4半主動懸架數學模型
1.1 1/4半主動懸架微分方程
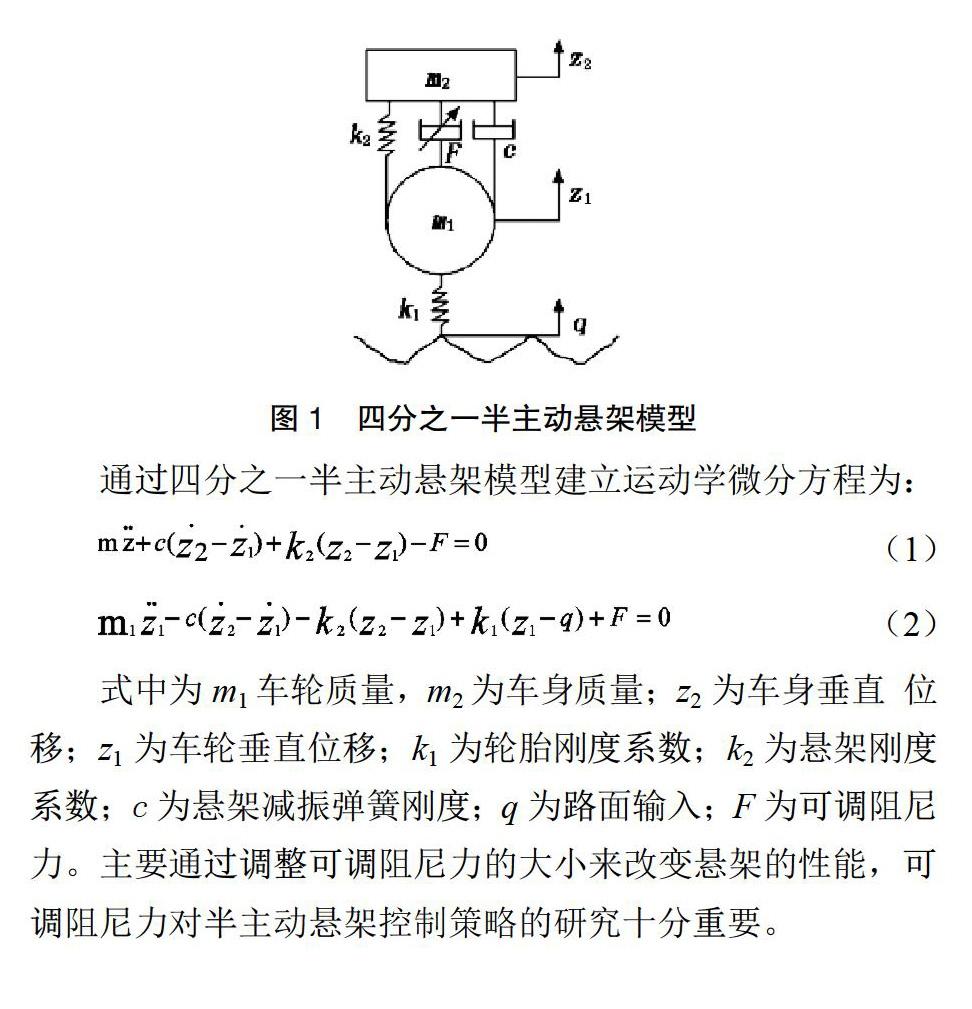
懸架在運動過程中具有非線性的特點 在進行仿真分析之前要對懸架系統進行簡化 建立二自由度四分之一半主動懸架數學模型 如圖1所示。
1.2 搭建二自由度1/4半主動懸架Simulink模型
定義系統狀態變量X=[x1 x2x3 x4]T 其中 ;定義系統輸出變量Y=[y1 y2 y3]T。
2 建立隨機路面輸入模型
2.1 隨機路況分析
本次仿真通過使用白噪聲積分法產生的隨機路況作為輸入 在車速不變的情況下汽車的速度時域功率譜就是為常數4π2Gq(n0)n2v的白噪聲信號 通過白噪聲積分得到的路面輪廓如下[5]。
2.2 搭建隨機路面模型
以路面為C級為基準 路面不平度系數Gq(n0)=256×10-6 m3 設置車速為25m/s 通過Matlab/Simulink構造出積分白噪聲模型 如圖3所示。
3 PID控制系統設計
3.1 PID控制原理
PID控制器由P(比例) I(積分) D(微分)三大環節組成。P(比例)通過系統進入控制狀態在出現偏差時進行補正;I(積分)通過在系統靜態時進行標定來提高系統控制的精確性;D(微分)的目的是通過修正系統中出現的偏差來提高精確度和靈敏度 提高了控制的穩定性[6]。PID控制原理圖如圖5所示。
3.3 PID控制算法參數設定
從PID控制原理上可以看出 要使控制效果達到最佳必須尋找合適的kp ki kd參數。kp ki kd這三個參數是互相影響 相互作用的 調整參數的同時控制效果也會發生變化。本次仿真通過使用試湊法 觀察改變PID參數變化后控制效果的變化來確定參數。在調整kp的大小的時候 通過將kp從很小增加到很大 再從很大逐步降低到很小的方法調整參數 并觀察控制效果的變化。通過觀察控制效果曲線的變化選取最優的kp值;積分系數ki的調整和比例系數kp的調整相似 同樣將kp從小增加到大 觀察控制效果的變化。在調整kp和ki參數時 如果控制效果不是很理想 這時就要考慮微分系數kd在控制策略中的影響。kd與kp ki系數的調整策略相同 將kd從小增到大的同時微調比例系數kp與積分系數ki 反復調整三個參數的值最終得到理想的控制效果。最終選取kp=20 ki=225 kd=0.003。
4 Fuzzy-PID控制系統設置
4.1 Fuzzy-PID控制器結構
Fuzzy-PID控制原理如圖7所示。通過模糊控制策略的調整可以減少汽車行駛過程中參數變化的影響 達到更好的控制效果 從而改善汽車行駛平順性。
控制器的結構為二維模糊控制器 模糊控制器的輸入量為車身垂直速度誤差信號和車身垂直加速度信號 用e和ec表示。輸出量為比例系數 積分系數 微分系數 用kp ki kd表示。輸入 輸出變量的取值均在{NB NM NS ZO PS PM PB}中選取。
4.2 Fuzzy-PID控制器
選取車身垂直速度誤差信號e的基本論域為[-1 1] 模糊論域為{-3 -2 -1 0 1 2 3};車身垂直加速度信號ec的基本論域為[-8 8] 模糊論域為{-3 -2 -1 0 1 2 3};輸出的基本論域為[-900 900]模糊論域為{-6 -4 -1 -2 0 2 4 6};量化因子ke取0.36 kec取3.75 比例因子取150。模糊控制器的函數選擇為三角函數trimf fuzzy控制器如圖8所示。
4.3 確定模糊規則和控制策略
在模糊PID控制器的控制算法設計中 模糊規則的設計十分重要 必須在設置差值e和差值變化率ec的過程中根據變化將參數kp ki kd設定在一定范圍內。
參數e ec kp ki kd選取的NB NM NS ZO PS PM PB七個模糊語量 采用if A and B then C 的控制語句不斷調整 直到得到合理的控制規則,每一條模糊規則都對應著一條控制語句[7]。e ec kp ki kd通過高斯函數得到自己的隸屬度 通過重心法找出控制作用分布的中心來反映輸出的模糊推理結果。最終得到的控制規則表如圖9所示。
5 仿真結果分析
在相同的車速和同一路面條件下,對被動懸架,PID控制半主動懸架,Fuzzy-PID控制半主動懸架進行仿真,觀測輪胎動載荷、懸架動撓度、車身垂向加速度這三個評價指標。得到數據如圖11-圖13所示。
6 總結
本文通過對二自由度半主動懸架系統為研究對象,搭建PID控制模型和Fuzzy-PID控制兩種控制策略,與被動懸架相比,PID控制下優化了13.96%,3.6%,15.2%,Fuzzy-PID控制使懸架三項性能指標分別優21.8%,9.1%,27.4%。兩種控制方法對懸架性能均有改善,并且Fuzzy-PID控制在非線性條件時具有良好的自適應能力,優化效果要好于PID控制,為今后的半主動懸架系統研究提供了參考。
參考文獻
[1] 楊惠.基于模糊PID的車輛半主動懸架系統研究[J].現代信息科技,2019(7);2096-4706.
[2] 湯建新,張騰,牛塞塞.半主動空氣懸架的PID優化控制和聯合仿?? 真[J].汽車實用技術,2018(1);1671-7988.
[3] 王大勇,王慧.基于變論域模糊控制的車輛半主動懸架控制方法[J].中國機械工程, 2017, 28(3):366-372.
[4] 袁海英,高遠,王雨濤,等.車輛主動懸架系統的舒適性優化控制[J].? 計算機仿真, 2018, 35(1):141-146.
[5] 韓豫萍.智能控制在汽車半主動懸架中的應用[D].山東:山東輕工業學院,2019.
[6] 孫士雷.電子控制主動式空氣懸架充放氣特性控制策略的研究 [D].山西:山西太原理工大學,2019.
[7] 劉會森,張玉蓮,董全林.模糊PID在智能調節閥控制系統中的應用[J].機床與液壓,2018,46(1):91-96.
[8] 劉潛,王天利.汽車半主動懸架的模糊PID控制仿真研究[J].農業裝備與車輛工程,2017(7):21-24.
