旋轉導向鉆井工具姿態參數的DSP 數據采集系統設計
2020-11-02 07:59:52張旭亮阮巖
現代計算機 2020年27期
張旭亮,阮巖
(1.西安石油大學,西安710065;2.陜西省油氣井測控技術重點實驗室,西安710065)
0 引言
隨著傳感檢測技術、微電子技術和數字信號處理技術等與石油勘探開發相關技術的不斷進步,旋轉導向鉆井技術在近幾十年來也得到快速的發展。旋轉導向鉆井技術是一項高水平的自動化智能化閉環導向鉆井技術[1],具有井眼軌跡實時控制精準、位移延展能力強、井下安全系數高和井眼凈化效果好等諸多優點,適用于復雜大位移水平井、長水平段水平井以及三維多目標井、特殊油藏、深海鉆井、垂直深井等[2],并且能夠有效提高油氣采收率和高難度特殊油藏的勘探開發能力,同時在開發過程中可減少鉆井平臺的數量,節省人力和物力的投入,降低深海石油勘探開發成本。實時精準地對鉆井工具姿態參數進行測量至關重要,是實現旋轉導向鉆井工具導向精準控制的關鍵因素之一[3]。井下閉環控制系統需要根據導向鉆井工具在井下的姿態參數進行反饋控制,以實現井眼軌跡的動態穩定,確保井眼準確鉆入設計靶區。
近些年國內一些研究機構和高校不斷將數據采集技術應用在石油測井領域,推動了數據采集技術在石油領域的發展。中國石油集團測井有限公司設計了基于CPLD 控制的隨鉆測井數據采集系統,通過硬件實現了連續的實時數據采集和實時數據處理;中海油服油田技術研究院設計了一種基于DSP 和FPGA 的數據采集處理電路,該電路可實現復雜聲波信號的采集、濾波、編解碼等功能,并可在井下高溫環境下穩定工作;清華大學以SoC FPGA 和AD7609 模數轉換器作為核心,搭建了一種用于石油聲波測井的多通道采集系統,該系統可以實現聲波模擬信號的采集存儲以及數字濾波、壓縮打包等處理,并可通過CAN 總線將數據傳送至地面控制系統[4]。
1 系統主要電路設計
可靠穩定的硬件平臺是保證系統功能和性能的基礎,結合鉆井工具姿態測量理論,考慮到系統對主控芯片數據運算處理能力、功耗和算法移植性等因素,選用浮點型DSP 芯片TMS320F28335 作為核心控制器,同時根據系統設計需求以及控制芯片結構、資源和性能特點設計了系統整體結構,介紹系統硬件基礎外圍電路以及功能電路的設計方案。
1.1 系統整體結構
以TMS320F28335 為系統設計核心,外設硬件設計主要包括信號調理電路、時鐘電路、ADC 校正電路、電源電路、復位電路、顯示電路以及通訊接口。鉆具姿態信號通過傳感器采集后,經過信號調理電路,將調理后的信號和兩路校正電壓信號送入ADC,轉化為DSP可處理的數字信號,并進行數字濾波、ADC 誤差校正和位置誤差校正,最后解算姿態角度并實時顯示。系統結構圖如圖1 所示。

圖1 系統結構圖
1.2 TTMMSS332200F2288333355基礎外圍電路設計
(1)TMS320F28335 處理器
根據系統設計需求分析后,選用TMS320F28335這款DSP 芯片作為核心控制器,該芯片主頻最高可達150MHz,并且采用哈佛結構總線形式,程序與數據空間相互獨立,能夠根據設計需求,通過修改.cmd 文件來分配兩個空間所占用的內存,以減輕程序訪問運行時的瓶頸[5]。TMS320F28335 片內集成32 位高性能FPU(浮點運算單元),能夠提高應用復雜工控算法時的運算速度與精度,并且擁有SPI、SCI、CAN 等標準通訊接口,適用于各種工業現場應用需求。具有88 個多功能復用引腳,便于外設擴展。片內集成12 位ADC 模塊,擁有16 個采樣通道,可進行同步或順序采樣轉換,轉換結果可通過DMA 方式進行傳輸[6]。其還擁有外部存儲器接口 XINTF,可以實現 SRAM、Flash、ADC 等模塊的擴展。
(2)時鐘電路設計
考慮到系統需要穩定、精準的時鐘信號,并且為了讓TMS320F28335 工作在150MHz 主頻時,鎖相環控制寄存器配置方便、降低因采用高頻晶振而增加電路設計的復雜度,最終選擇30MHz 外部振蕩器芯片HXO-36B。外部振蕩器(有源晶振)輸出一般為方波信號易產生諧波干擾,在其輸出端串上一個電阻,該電阻與電容構成RC 積分平滑電路,將方波轉換為近似正弦波,本設計阻值為選用33 歐姆的電阻。在外部振蕩器的輸出端串聯上一個電阻,也可以減少反射波,避免反射波疊加引起。在外部振蕩器電源輸入端加上磁珠以抑制電源噪聲。對時鐘電路進行布線時,應盡量讓時鐘線長度短,靠近芯片,并且最好在一面,避免使用過孔,以減少信號干擾。時鐘電路如圖2 所示。

圖2 時鐘電路圖
(3)電源電路設計
根據本系統工作特性與性能要求,最終選擇TPS767D301 低壓差線性穩壓電源芯片為主控制器TMS320F28335 提供所需電源,該芯片可輸出兩路電壓,一路為3.3V,另一路可調,范圍為1.5~5.5V,輸出電流最高為1A,并且具有高溫自動關閉功能,當監測到工作溫度異常時,會立即斷電,防止因溫度過高而燒壞芯片。本系統DSP 的供電電路如圖3 所示。通過計算選擇合適的阻值,可輸出1.9V 供電電壓,電源芯片TPS767D301 的5V 電壓輸入由實驗室自制的超低紋波直流專用測試電源提供,在PCB 硬件電路板進行設計的過程中,應將電源芯片如何快速散熱這個問題考慮在內。
芯片在工作時,需要頻繁使用電源,將會導致開關效應,引入開關噪聲,同時電源中也存在紋波干擾,因此本系統在芯片的每個電源引腳設計了由大電容和小電容組成的去耦濾波電路,能降低電源的噪聲干擾和紋波。其中3.3V 電源去耦電容電路如圖4 所示。

圖3 DSP供電電路設計
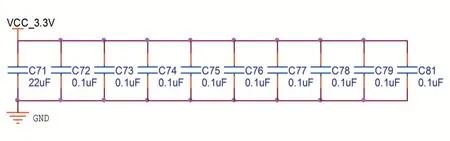
圖4 3.3V電源去耦電容電路設計
與一般的MCU 不同,TMS320F28335 涉及數字和模擬兩個電路,為了避免數字電路產生的噪聲干擾模擬電路,在進行供電電源設計時,采取數字和模擬兩個電源分別為對應電路供電的形式[7],示意圖如圖5所示。
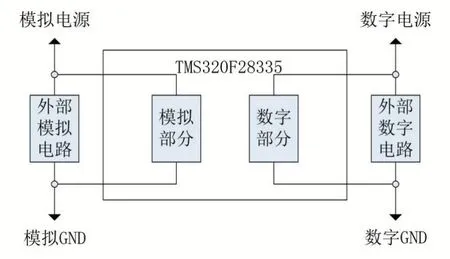
圖5 電源分割示意圖
(4)JTAG 接口電路設計
TMS320F28335 集成JTAG 標準測試訪問接口,結合仿真器和CCS 仿真軟件可實現TMS320F28335 片內寄存器和存儲空間的直接訪問,方便開發人員進行實時的系統軟件調試、程序代碼修改、實驗仿真測試,使得整個系統研發過程更為簡便直觀。
本系統采用TDS510 仿真器,選擇2.2KΩ的電阻,同時為防止仿真器插反保護元器件,將插座第6 引腳剪掉,仿真器對應的插孔堵住。JTAG 接口電路如圖6所示。在PCB 硬件電路板設計時,時鐘線需盡量用粗線,以增加電路的驅動能力。
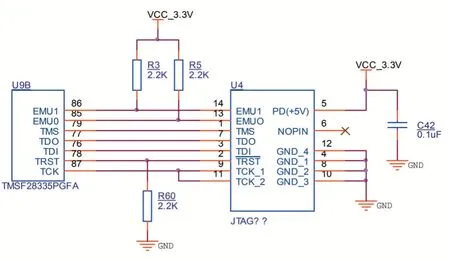
圖6 JATG接口電路圖
(5)復位電路設計
電子系統可能會受到外界環境、電路板信號線間的電磁等不穩定因素的干擾,或者出現軟件程序出錯跑飛等情況,都會導致系統工作異常,此時應進行系統復位,重新引導啟動系統軟件程序,進行初始化設置,將系統恢復至初始默認狀態,并重新開始運行軟件程序。
TMS320F28335 芯片是低電平復位的,并且其對低電平脈沖持續時長、上升時間均有嚴格要求,內核要求低電平復位脈沖持續時長最少為8 個晶體時鐘周期(OSCCLK),VDD供電電壓上升至1.5V 后的1ms 內復位脈沖必須為低電平,以確保內部Flash 工作穩定,并且振蕩器還需10ms 時間才可穩定。所以復位脈沖時長為100ms 比較合適,可以兼顧到所有延時條件,保證系統穩定復位,也不會浪費寶貴的系統啟動時間。考慮系統對電路板整體復位穩定性等因素,本系統選用MX6316 復位芯片,實現系統的手動復位,具體電路設計如圖7 所示。當按鍵按下后,----MR引腳的輸入信號為低電平時引腳輸出信號立即變為低電平,系統接收到低電平信號后開始復位。

圖7 系統復位電路設計
2 其他功能電路設計
2.1 TTMMSS332200F2288333355內部AADDCC模塊
TMS320F28335 內部的ADC 模塊具有自我校正功能,在芯片出廠時生產商將ADC 校驗子程序直接嵌入OTP 寄存中,程序中包含芯片的具體校驗數據,當TMS320F28335 上電啟動時,Boot ROM 自動調用ADC校驗子程序來初始化ADCREFSEL 和ADCOFFTRIM寄存器,在一次采樣轉換結束后,首先將采樣結果加上或減去偏移校正值,再存放到相應的ADC 結果寄存器中,用以提高ADC 采樣轉換精度,但在實際應用過程中,發現ADC 采樣轉換精度提高不多,因此還需要采用其他ADC 校正方法,提高ADC 采樣轉換精度。ADC 結構框圖如圖8 所示。

圖8 ADC模塊結構框圖
2.2 信號調理電路設計
所采用姿態測量傳感器為加速度計,其輸出信號為-3mA~+3mA 的電流信號,而 TMS320F28355 的 ADC模塊輸入的為電壓信號。因此要將加速度計輸出信號進行調理,使得接入ADC 模塊的信號范圍為0~3V。將傳感器的輸出信號與電阻R96 相連,轉換為電壓信號,進入同相比例放大電路,調節電位器R96,使得輸出信號放大到-3~3V 之間,再通過電壓轉化電路將信號轉化為0~3V,連接電壓跟隨器以增大信號驅動力。為保護ADC 輸入端口,還需加上鉗位電路,當電壓超過3.3V 時,二極管D9 導通,輸入到ADC 端口的電壓為3.3V;當電壓為負時,二極管D8 導通,輸入到ADC 端口的電壓為0V,因此該電路能使輸入到ADC端口的電壓穩定在0~3.3V 之間,對ADC 端口起到保護作用。信號調理電路如圖9 所示。

圖9 信號調理電路
2.3 AADDCC校正電路設計
由ADC 校正原理可知,要實現對ADC 增益誤差以及偏移誤差的校正,首要條件是向ADC 模塊的輸入通道分配兩路已知的精準參考電壓,由對應的結果寄存器的采樣轉化結果,可解算出ADC 自身的增益系數和偏移系數,在軟件算法中校正其他采樣通道,以實現數據的精確采集。ADC 校正電路如圖10 所示。
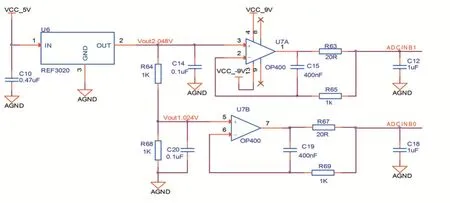
圖10 ADC校正電路
2.4 液晶顯示電路設計
系統選用12864 液晶顯示器的驅動電壓信號為3.3V,因此可利用TMS320F28335 的GPIO 引腳輸出信號直接進行控制操作,不需要任何附加電路,即將GPIO58 引腳、GPIO22 引腳、GPIO59 引腳、GPIO23 引腳分別與液晶的復位RST 引腳、片選CS 引腳、數據SID 引腳、時鐘 SCLK 引腳連接,只需 4 個 GPIO 引腳就可控制LCD12864 穩定工作,這樣即節省了I∕O 端口資源,也簡化了電路設計。并且可以通過電位器R71改變顯示對比度,使其工作在最佳顯示狀態。液晶顯示電路設計如圖11 所示。

圖11 液晶顯示電路
3 結語
本文主要根據旋轉導向鉆井系統的特點實現了鉆井姿態參數的傳感器信號采集、數字濾波、ADC 校正誤差等功能的硬件電路設計,是旋轉導向井工具姿態參數數據采集系統的重要部分,后續的研究內容還需要設計相應的軟件程序實現對工具姿態參數的采集與解算。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25