一種基于溫度動態估計的AUV 鋒面跟蹤算法
2020-11-04 07:23:00曲向宇李一平
海洋技術學報 2020年4期
關鍵詞:區域
曲向宇 ,李一平
(1. 中國科學院沈陽自動化研究所 機器人學國家重點實驗室,遼寧 沈陽 110016;2. 中國科學院機器人與智能制造創新研究院,遼寧 沈陽 110169;3. 中國科學院大學,北京 100049)
海洋鋒面是指海洋中存在兩種或多種理化性質顯著不同的水體的區域,該區域水文要素呈現較高的水平梯度,在空間上呈狹長帶狀結構[1]。因為鋒面區域內的能量交換非常強烈,所以海洋鋒面在海洋動力學的研究中十分重要。同時,由于鋒區內存在特殊的物理過程,特別是上升流現象,使得該區域海水富營養化,海水初級生產力提高,與海洋產業活動聯系十分緊密。另外,海洋鋒面對水聲通信技術的影響也非常明顯。因此,研究和觀測海洋鋒面這種海洋現象,對于海洋科學、海洋漁業以及海洋軍事作戰具有重大意義[2]。
常規的海洋特征觀測方法如潛標、浮標,使用相應的傳感器,在固定的位置或在漂流狀態下進行觀測。而自主水下機器人(AUV)利用自身搭載的傳感器,可以實現對目標區域水文要素的連續動態觀測,相較于常規方法具有快速性和自主性的優點[3]。由于鋒面這種海洋特征,易受風、海流等因素影響,水文要素復雜且變化較快,為了快速對指定區域采樣,通常使用AUV 進行海洋特征的觀測[4]。
AUV 通常采用梳狀觀測方法,對感興趣區域進行覆蓋觀測,但該方法缺乏自主性和靈活性,不適合作為海洋特征觀測的方法[5-6]。Zhang Y 等[7-8]提出了一種基于溫度梯度閾值的“之”字鋒面跟蹤算法,該方法設置了鋒面的溫度梯度閾值,用來判斷AUV是否進入鋒面,并通過對航向角的調整,實現AUV在觀測區域內的往復鋒面跟蹤。Wang D[9]根據實時觀測到的溫度數據,利用最小二乘法估計鋒面區域的梯度方向,保持AUV 沿著溫度梯度上升或下降的方向前進,當到達設定的等溫線進行折返,實現AUV 在指定溫度邊界之間的鋒面跟蹤。考慮到鋒區的形態往往較為復雜,需要鋒面跟蹤算法具有較高的環境適應性,避免陷入特定區域重復觀測。基于以上考慮,本文提出了一種基于溫度動態估計的鋒面跟蹤算法,在AUV 到達鋒面邊界時,通過沿等溫線跟蹤一段距離,來加快鋒面跟蹤速度,并脫離“陷阱”區域,保持了對鋒面的持續跟蹤能力;選用高斯過程回歸(GPR),替代最小二乘法作為溫度動態估計的方法,增加了近鄰區溫度預測的準確性[10-12]。
1 鋒面區域模擬
1.1 研究區域
中國的東部近海在冬季有著穩定豐富的海洋鋒面現象。本文選取一個典型的沿岸鋒面——山東半島南部“N”形鋒面作為研究對象。該鋒面在冬季位置穩定,具有規則的形態,在121°E 西面平行于海岸線,在 121°E,36°N(A 區域)以東呈離岸走勢,向東南方向約伸展到 122°E,35.5°N 附近,在該位置東面,沿東北方向分布至山東外海。該鋒面呈現了一個完整的“N”形結構,在12 月中旬至2 月中旬之間,鋒面豐富且形態成熟,3 月份之后逐漸消亡[13]。考慮到AUV 的續航力有限,無法對整個鋒面全部觀測,故本文選取“N”形鋒面的A 區域,用于鋒面跟蹤算法的仿真驗證。
1.2 溫度數據獲取與處理
本文選用MODIS 海溫衛星遙感資料作為鋒區溫度數據來源,MODIS 的L3 級數據產品可提供全球范圍的遙感數據。文中所需的海水表層溫度(SST)數據由美國國家航空航天局(NASA)網站免費提供,下載的數據集名稱為AQUA_MODIS.20191211.L3m.DAY.SST.sst.4 km.NRT.nc,空間分辨率為4.64 km,時間分辨率為1 d。通過對數據集的處理,可以繪制出“N”形鋒面的SST 圖像。如圖1 所示,給出了在2019 年12 月11 日該區域的海水溫度情況。

圖1 山東半島南部“N”形鋒面
從圖中可以明顯地觀察到“N”形鋒面的形態和位置,其中鋒面的 A 區域在 121°E、36°N 附近。進一步縮小數據集范圍,A 區域SST 圖像如圖2 所示。
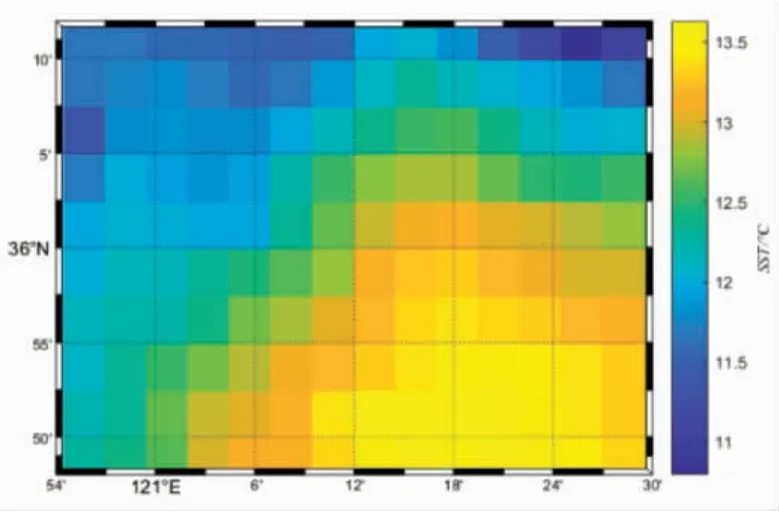
圖2 鋒面A 區域
考慮數據集中溫度值的空間分辨率為4.64 km,圖2 中所示區域內的數據點過少,無法滿足在鋒面跟蹤任務中對算法對采樣數據的處理需求。因此,本文利用樣條函數插值的方法對所選區域的數據點進行插值處理。定義了一個長度為45 km、寬度為35 km 的任務區域,設置溫度數據點的間距為0.1 km,經插值后得到的A 區域溫度場如圖3 所示。至此,本文完成了任務所選鋒面區域的溫度場模擬。
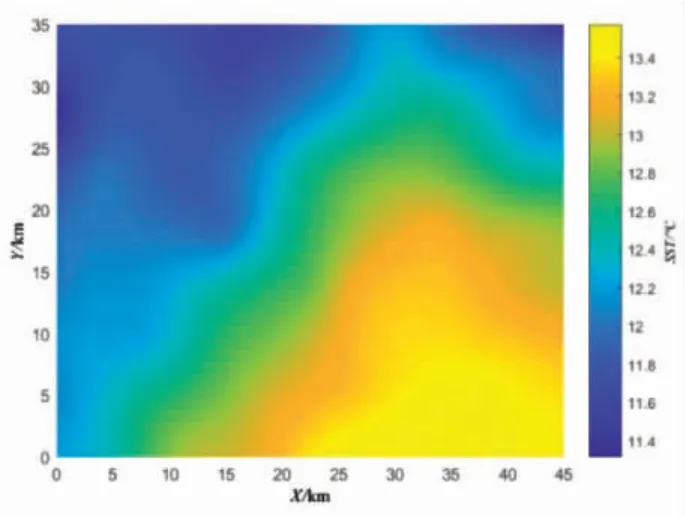
圖3 插值后的鋒面A 區域
2 鋒面跟蹤算法
考慮到海洋特征的水平與垂直性質,AUV 通常采用水平分層觀測或者垂直剖面觀測的方法進行特征跟蹤。由于鋒面具有較高的溫度水平梯度,一般令AUV 在固定的深度執行鋒面觀測任務。本文利用AUV 近一段時間內采集的溫度數據,通過高斯過程回歸的方法預測近鄰區溫度分布,并根據預測結果,選取AUV 下一次鋒面跟蹤的路徑點。在路徑規劃階段,首先判斷AUV 所處鋒區位置,若在鋒區內部,則保持跟蹤路徑沿著溫度梯度方向,在鋒區內執行梯度下降或上升的鋒面跟蹤動作;當航行到鋒面邊界時,采取沿等溫線跟蹤的動作。本文提出的鋒面跟蹤算法流程圖如圖4 所示。
2.1 預規劃
本文令AUV 在觀測區內的等溫線Thot和Tcold之間(冷熱水團分界面),進行鋒面跟蹤任務。當開始執行任務時,假定AUV 的任務初始點在任務區域外,令其沿著預定義航向運動到等溫線Thot或Tcold上,之后開始執行鋒面跟蹤算法。這樣做有兩個好處,一是AUV 的布放位置可以有更多的選擇,二是為溫度預測累計輸入樣本。

圖4 本文鋒面跟蹤算法流程圖
2.2 近鄰區溫度預測
高斯過程回歸(GPR)是一種優秀的環境模型估計方法,本文利用GPR 方法對AUV 一段時間內采樣的溫度數據進行分析,來預測當前位置附近區域的溫度場分布。已知AUV 在鋒區近一段時間內n次溫度采樣的數據,其中輸入位置集合X={xi∈Rd|i=1,2,…,n},對應有溫度集合 y={yi|i=1,2,…,n},共同構成訓練數據集D={X,y}。利用GPR 方法,可對D 找到反映出訓練集合內輸入與輸出之間的函數映射關系,并根據測試位置X*,求出對應的預測值y*,獲得了指定位置的溫度預測值。
在任務區域內,AUV 保持固定航速,Δt 為相鄰采樣時間間隔,相鄰采樣點之間的距離為R0。隨著任務執行時間的不斷增加,AUV 溫度采樣的數據越來越多。若將所有的數據都作為GPR 的樣本輸入,無疑會增加溫度預測的數據處理時間,并且較早的歷史數據會干擾當前位置的預測結果。本文通過設定預測窗口寬度m,來定期更新GPR 的樣本輸入數據集合。如果采樣點無法填滿窗口,將寬度m 臨時調整為此時的采樣點數量。
2.3 自適應路徑規劃
AUV 的自適應路徑規劃主要被分為兩種情況,沿梯度方向跟蹤和沿等溫線跟蹤。通過判斷AUV當前位置,決定其下一步規劃執行的具體任務。如圖5 所示,為自適應路徑規劃的示意圖。
2.3.1 位置判斷方法 本文將溫度閾值作為對AUV 位置進行判斷的條件,表示為:

圖5 自適應路徑規劃示意圖

式中:Tk表示當前位置的溫度值;Tb為上一次所達邊界的溫度值;閾值當滿足ΔT≥Tth時,判斷當前位置位于等溫線邊界,開始執行沿等溫線跟蹤任務,并且令Tb=Tk,更新邊界溫度;若不滿足,判斷位于鋒區,繼續執行沿梯度方向跟蹤任務。
2.3.2 沿梯度方向跟蹤 鋒區具有較高的溫度水平梯度,本文定義從溫度邊界Thot向Tcold運動時,執行梯度下降搜索策略,反之執行梯度上升搜索策略。海洋鋒面是動態變化的,為了提高觀測速度,結合實時預測的溫度場可以確定鋒區內AUV 相鄰觀測點之間的最優距離R。考慮預測溫度場的準確性隨距離成負相關,觀測點之間的距離不宜過大,定義Ri∈[R0hR0],其中h 為常數。若AUV 當前位置為xk,溫度值為yk,利用GPR 對與當前位置距離為Ri的圓形觀測區域的溫度場進行估計,可以獲得溫度預測集合YRi,對應位置坐標集合PRi。若為梯度上升方向,對應Ri的估計梯度值GRi表示為:

若為梯度下降方向,GRi表示為:

式中:αRi為距離權重因子,衡量預測半徑對估計值的影響,表示為:

i最優觀測距離R=Ri,表示對應期望觀測點的鋒面強度最高。接下來求取期望觀測點的坐標,考慮對應R的坐標集合溫度預測值集合Y=R若為梯度上升搜索,則YR;若為梯度下降搜索,則將對應的作為 AUV 的第 k+1 次觀測位置 xk+1。考慮AUV 的采樣間隔為R0,則觀測目標之間的采樣路徑點數記為R/R0,分布在相鄰觀測點所在位置之間的直線上,沿梯度方向路徑點選取如圖6 所示。

圖6 沿梯度方向路徑點選取
2.3.3 沿等溫線跟蹤 當AUV 沿著梯度方向運動到溫度邊界時,根據鋒面跟蹤算法,將路徑規劃策略切換為沿等溫線跟蹤。該部分將觀測距離固定為R0,便于控制跟蹤路徑長度。本文定義跟蹤等溫線的路徑點數量為w,那么一次等溫線跟蹤的路徑長度為w·R0。沿等溫線方向路徑點選取的示意圖,如圖7 所示。

圖7 沿等溫線方向路徑點選取
當AUV 第k 次觀測到達溫度邊界Thot時,將采取沿等溫線跟蹤的動作。近鄰區位置坐標集合調整為 PB_circle,溫度預測值集合為 YB_circle,令選擇預測值最接近Thot的位置作為新的觀測點。半圓B 的方向角度為ψB,它決定了半圓內的可選觀測點范圍,即PB_circle。ψB的值為上次跟蹤等溫線的方向,即上次等溫線跟蹤路徑上末點與始點之間的方向角,用來預測當前跟蹤的等溫線角度。每次AUV 切換到沿等溫線跟蹤的動作時,ψB都會被重新計算。當AUV 沿著等溫線跟蹤的累計距離為w·R0時,將重新切換為沿梯度方向跟蹤。
3 仿真實驗
3.1 鋒面跟蹤算法驗證
已知觀測區域A 尺寸為35 km × 45 km,設置AUV 的采樣間隔R0=0.1 km,固定航速V=1.5 m/s,定義Thot=13℃,Tcold=12.4℃,路徑點總數為Num=1 500(150 km),起始位置為(8,10)。在選取不同等溫線跟蹤長度w 的情況下,文中提出算法的仿真結果如8 所示。

圖8 不同w 下本文算法仿真結果
從仿真結果可以發現,當w=20 時,AUV 在鋒帶彎折區域內觀測較為密集,速度較慢,耗費了較多的時間;當w=25、w=30 時,算法均迅速地擺脫了彎折區域,較快地完成了鋒面跟蹤任務;當w=35 時,AUV 在路徑點Num=1 201 時就完成了該區域的跟蹤任務,但是過快的跟蹤速度導致了鋒面觀測效率變低。
基于以上分析,本文算法通過改變w 的大小,可以調整AUV 在鋒面跟蹤過程中的精細觀測程度。w 應根據具體任務選取一個合適的值,若要加快跟蹤速度、覆蓋更廣的鋒面區域,則適當提高w 的值;若要提高對當前區域的鋒面跟蹤精細程度,應適當減小w 的值。
3.2 環境實時預測效果分析
為了驗證GPR 環境模型估計方法的準確性,本文利用不同時刻預測的近鄰區溫度場和對應的實際溫度場的均方誤差進行描述。均方誤差的表達式為:

式中,yi表示預測值,tpi表示真實值。選取算法(w=25)執行期間的4 個不同時刻,GPR 不同預測半徑R 對應的均方誤差如圖9 所示。
圖中不同的Num 值描述了AUV 任務期間的不同時刻所處的位置。由上圖可知,GPR 的預測半徑R 越小,對環境的預測誤差值越低;任務執行的越久,GPR 對環境估計的越準確。算法中的預測半徑R 一般不超過0.5 km,此時預測誤差量級約為10-4,可以較為準確地估計當前AUV 近鄰區的溫度場,表現了GPR 對鋒面觀測區域優秀的溫度估計能力。

圖9 GPR 環境實時預測的均方誤差
3.3 性能分析
為了分析算法性能,將傳統的鋒面之字跟蹤算法(簡稱為對比方法1)和基于最小二乘法的鋒面之字跟蹤算法(簡稱為對比方法2),與本文算法(w=25)進行對比仿真實驗。本次仿真不對路徑點數目進行限制,直至完成觀測區域內的鋒面跟蹤任務。其余仿真參數不變,各算法的仿真結果如圖10 所示。

圖10 對比仿真結果1
由上圖仿真結果可知,對比算法1 在鋒面彎折區域失去了對鋒面的跟蹤能力,無法完成對鋒面的跟蹤;對比算法2 和本文算法均可在上述仿真情況下完成鋒面跟蹤任務。
為了比較算法的觀測效率,定義了平均路徑鋒面溫度梯度值GM,代表了單位觀測路徑長度上鋒面所占的比重,表示為:

式中:Gi為對應觀測位置的溫度梯度值,采用sobel 梯度算子對插值后的溫度場進行計算而得到。算法的快速性可通過任務總時間TA 來表示:

在上述仿真結果下,對比算法2 和本文算法的性能指標如表1 所示。
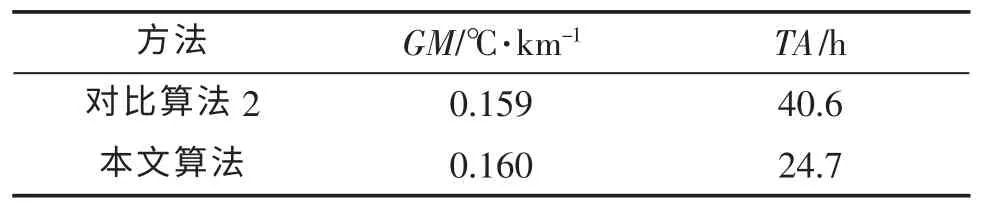
表1 性能指標
本文算法在觀測效率上與對比算法2 相近,在跟蹤速度上快了約39.4%,體現了本文算法鋒面跟蹤的快速性。
接下來重點考慮算法的穩定性和環境適應能力。設置Thot=13.2℃,Tcold=12.3℃,擴大了待觀測的鋒面區域,并將起始位置調整為(5,10),保持其他參數不變,對比算法2 和本文算法的仿真結果如圖11所示。

圖11 對比仿真結果2
對比算法2 執行任務的過程中于3 處區域陷入了重復觀測,整個任務耗費了大量時間。可以發現,當鋒面的形態變化較為顯著時,鋒面跟蹤任務要求算法具有一定的抗干擾能力。本文算法通過沿等溫線(即鋒區邊界)跟蹤,不斷擺脫“陷阱”,即便邊界形態變化較大,算法也能持續地跟蹤鋒面,并且保持了快速的跟蹤速度。可見本文提出的鋒面跟蹤算法,具有良好的環境適應能力,且能夠穩定、快速地跟蹤鋒面。
4 結論
本文提出了一種基于溫度動態估計的AUV 鋒面跟蹤算法,該算法利用更新的環境信息實時預測近鄰區溫度分布,并根據當前位置選擇不同的路徑規劃策略。若在鋒區內部,則沿梯度方向跟蹤來搜索鋒面,通過實時預測的環境確定最優觀測距離,從而提高鋒面觀測速度;若在鋒區邊界,則沿等溫線跟蹤來加速擺脫鋒面,通過改變邊界跟蹤長度,可以實現對鋒面不同程度的精細觀測。使用該算法對不同觀測區域的鋒面進行仿真,結果顯示,本文算法較于常規算法,在觀測速度和環境適應能力上有更好的表現,可應用于不同鋒面區域的跟蹤任務。本文研究中的鋒面觀測區域是水平方向的,下一步計劃是結合鋒面在垂直方向上的特性,進行空間上的AUV 鋒面跟蹤算法研究。
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15