基于機器學習的航空器進近飛行時間預測
2020-11-06 06:44:52葉博嘉鮑序劉博田勇
航空學報 2020年10期
葉博嘉,鮑序,劉博,田勇
1.南京航空航天大學 民航學院,南京 211106 2.中國民航華東空管局江蘇空管分局,南京 211100
隨著航空運輸業持續高速發展,民航飛行對空域需求與日俱增,空域緊張的局面已然呈現由點到面的發展趨勢。進近(終端)管制區作為最為繁忙的空域類型,空中交通流量日趨飽和,管制員調配難度和工作負荷急劇增加,由此引發的飛行延誤以及沖突問題日益嚴峻[1]。為有效緩解空中交通擁堵態勢,中國民航業界對進近管制區空域和交通流的運行優化展開了深入研究[2-6],航空器進近飛行時間預測則是相關研究的重要基礎。
航空器進近飛行時間是指航空器在機場附近完成高度、速度和構型調整直至降落所需的時間。從研究角度,進近飛行時間是進離場管理、沖突探測與解脫和終端區流量管理等問題的重要依托,如果缺乏準確的預測,則難以保障調配和優化方案的安全性和有效性。實際運行中,進近飛行時間是管制員為進場航空器進行匯聚排序、沖突解脫、安排落地次序的基本依據,如果缺乏準確預判,管制員需根據航班動態持續修正航班進近次序,不僅增加了管制工作負荷,還會影響航班地面滑行、引導和停機位分配等后續人員及車輛保障工作。因此,準確預測航空器的進近時間不僅有助于提高進近管制區的運行效率,降低管制員工作負荷,還能為機場和航空公司在航班落地后的工作提供精確指導,具有重要的研究價值和應用前景。
國內外學者關于航空器飛行時間預測的研究一直非常關注,現有方法大體可分為2類:行為建模方法和數據驅動方法。
行為建模方法旨在通過對航空器飛行軌跡建模,仿真航空器的狀態和飛行過程,預測航空器的進近飛行時間。飛機制造商發布性能軟件,如:波音的BPS(Boeing Production System)和空客PEP (Performance Engineer’s Program)等是建模最佳工具,但軟件模型復雜、參數繁多且存在商業保密問題。因此,Roy等[7]則提出一種隨機混合線性系統框架,建立包括:航空器位置、速度和加速度的連續狀態,直線、轉彎飛行離散狀態的系統,并采用混合狀態評估方法IMM(Interacting Multiple Model)進行求解,預測航空器進近飛行時間。Konyak[8]和Yepes[9]等將航空器意圖信息引入研究,提出動態更新航空器的起始下降點和側向轉彎信息,以改進預測的準確性。Zhang等[10]則融合在線的ADS-B (Automatic Dependent Surveillance-Broadcast)信息,以增加模型預測準確性。Lee等[11]則融合飛行計劃和程序,提出改進隨機混合系統,采用狀態相關的混合評估算法,求解模型并改進預測結果。隨著未來機載設備的升級,航空器與地面信息的交互能力不斷增強,實時數據有助于進一步提升航空器行為模型的預測精度。然而,在預測航空器進近飛行時間方面,行為模型并不關注航空器意圖變更原因,模型難以融合空域動態變化信息、交通態勢、管制因素、駕駛員行為等諸多運行要素。而實際運行中,進近空域是航空器匯聚和發散的密集空域,管制員需對進離場航空器飛行進行頻繁調整,解脫潛在沖突、安排匯聚和著陸次序,對航空器進近飛行時間會產生較大影響。因此,數據驅動的航空器進近飛行時間預測方法逐漸引起諸多關注。
數據驅動的方法是近些年較為流行的方法,其本質是通過采用數據挖掘、統計分析和機器學習等方法,基于樣本數據建立、訓練并驗證關鍵特征與預測值的數學模型,以預測航空器的進近飛行時間。Leege等[12]引入了廣義線性模型,在固定進場路線上預測15海里至45海里范圍內的航空器軌跡和飛行時間,模型考慮的因素包括:機型、速度、高度和風速信息。Tastambekov等[13]基于航空器歷史雷達運行數據,采用小波分解的方法建立線性回歸模型,預測航空器在10~30分鐘期間的運行軌跡。Hong和Lee[14]以前序航班軌跡為先驗數據建立貝葉斯概率模型,預測在管制員實施雷達引導時,航空器在終端區的飛行軌跡和時間。Kim[15]則考慮了離場時間、空中飛行時間、航空公司和天氣和季節因素。Wang等[16]基于ADS-B數據對航空器歷史運行航跡進行聚類和降維,采用基于多單元神經網絡方法建立回歸模型,預測進近航空器的四維航跡和飛行時間。Barratt等[17]對基于雷達點數據對航空器歷史航跡進行重組和聚類,重新生成航空器的航跡信息,并采用高斯混合模型預測航空器的進近飛行時間。
上述研究主要從航空歷史運行數據出發,試圖構建航空器初始進場狀態與典型航空器飛行軌跡的關聯,再根據預計的軌跡預測航空器預測進近飛行時間,部分研究引入了對航空器行為、管制因素和高空風等因素的考慮,但對造成進近空域飛行時間差異的諸多原因缺乏全面、系統的分析,預測模型的泛化能力也存在瓶頸。
本文旨在從分析影響進近飛行時間的主要因素出發,以準確預測航空器進近飛行時間為目標,綜合考慮航空公司因素、航空器類型、進場狀態、繁忙程度、運行模式、天氣情況、空域因素和管制因素,提取重要特征并與航空器飛行時間直接關聯,建立基于機器學習的進近飛行時間預測模型。研究從一線管制單位采集實際運行數據,以南京進近為實例展開了實例分析,分別建立了基于嶺回歸、支持向量機、隨機森林和神經網絡的機器學習模型,以調整決定系數、均方誤差、平均絕對值誤差為指標,訓練、驗證了模型的準確性和精度,并對模型中重要的特征和影響因素展開分析。
1 問題描述
在進近管制空域,航空器通常按照儀表進近程序(Instrument Approach Procedure,IAP)飛行,即對障礙物保持規定的安全超障余度,參照飛行儀表所進行的一系列預定的機動飛行[18]。儀表進近程序一般包括5個單獨的航段,分別是進場、起始進近、中間進近、最后進近和復飛航段[19],如圖1所示。其中,進場航段指航空器從航路一點至起始進近定位點之間的飛行路線,旨在下降飛行高度、降低航空器速度以完成從航路飛行到進近飛行的過渡。起始進近、中間進近和最后進近指航空器逐步完成飛行外形、位置、速度和高度的調整,直至對準跑道完成著陸的航段。復飛航段則是指航空器在無法完成進近時所遵循的飛行程序,通過改變形態、爬升高度以重新加入航線或開始另一次進近。
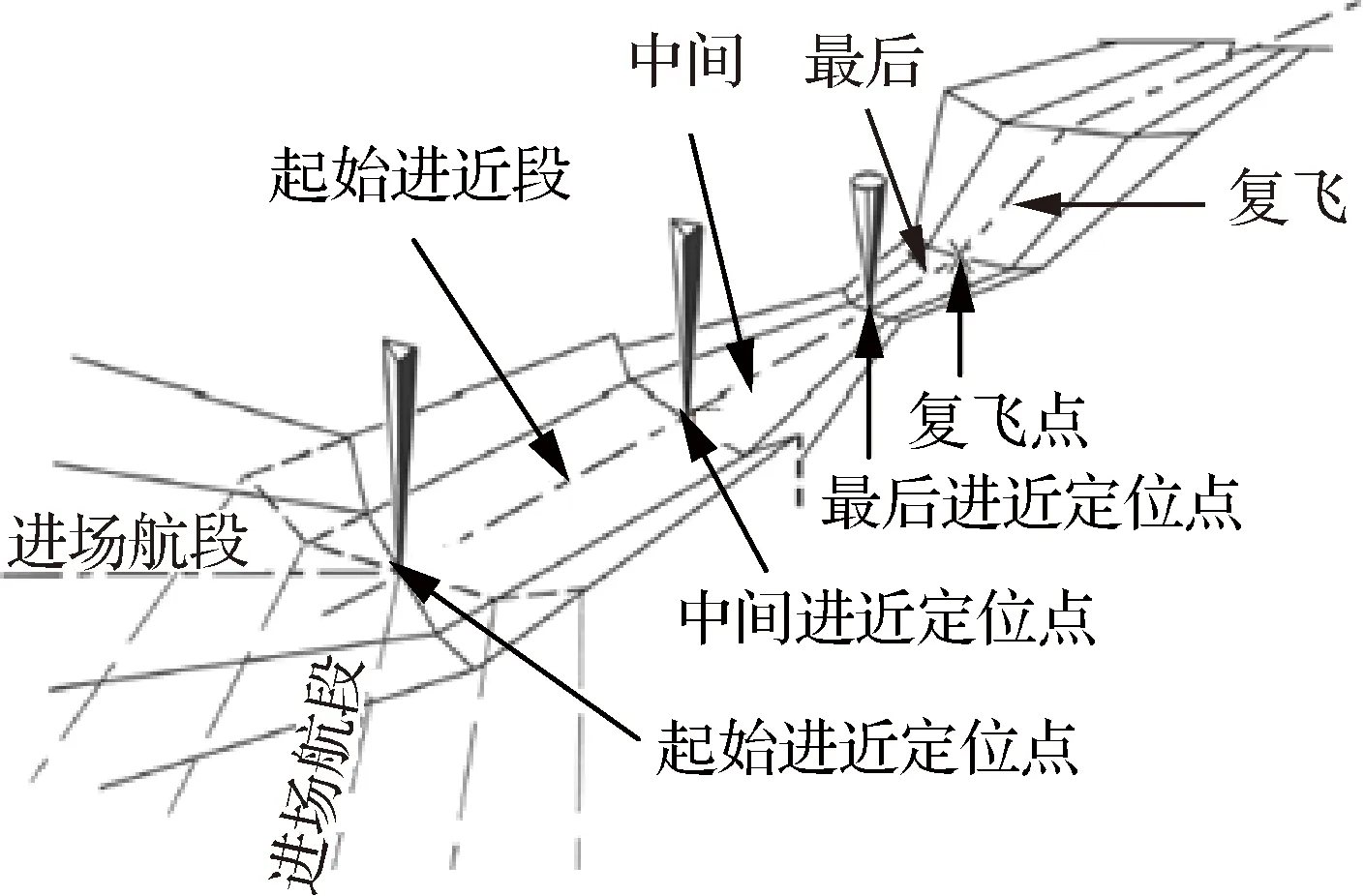
圖1 進近飛行示意圖Fig.1 Aircraft approach procedure
實際運行中,進近管制員為防止航空器與航空器、航空器與地面障礙物相撞,在收到進場航空器進入進近管制空域的位置報告后,向駕駛員通報空中有關飛行活動和飛行情報,指示其按照標準儀表進場程序飛行或采用雷達引導的方式,指示航空器按照某一具體的“航向、速度、高度”飛行,調配飛行沖突、安排落地次序、配備落地間隔,并在中間進近或最后進近階段將航空器移交給塔臺管制員。塔臺管制員根據機場場面運行情況發布落地許可或復飛指令,依次安排航空器落地。總的來說,航空器在進近飛行過程中,會受到諸多內部與外部因素的影響。內部因素包括航空器的性能(機型)、飛行員操作經驗等;外部因素包括所使用進場航線、跑道結構、運行模式、天氣情況和管制員經驗等。
本研究旨在與實際管制工作緊密結合,綜合考慮航空器在進近管制區飛行時的航空公司因素、航空器類型、進場狀態、繁忙程度、運行模式、天氣情況、空域因素和管制因素,預測航空器在進近管制區內的飛行時間,即從航空器到達進場點開始到航空器落地時的飛行時長。本研究將該實際問題可轉換為機器學習中的有監督學習問題,旨在建立重要影響因素與航空器進場飛行時間的函數關系。研究關鍵包括:采集并處理與進近飛行相關的重要數據,準確分析影響進近飛行的關鍵因素,提取出建模所需重要的特征,建立并訓練出具備良好預測能力的機器學習模型。
2 特征提取
2.1 數據采集與分析
本研究所采集的原始數據分為航行資料匯編數據(Aeronautical Information Publication,AIP)、航班運行數據、氣象數據和管制班組數據4大類。其中,航行資料匯編數據包括標準儀表進場航線圖、儀表進近圖、機場圖等,來源于中國民用航空局。航班運行數據、氣象數據和管制班組數據來自江蘇空管分局,主要是航班在南京進近運行時的相關數據。南京進近管制區位于華東地區西部,是中國東部沿海航空運輸熱線的樞紐區域,是連接中國西部地區至東南沿海、華南和港澳臺地區的主要航空通道。南京進近管制區現劃分為4個管制扇區,主要負責包括南京祿口國際機場在內的11個機場的起降和飛越航班提供管制服務,如圖2所示。本文以南京祿口國際機場到達航班為研究對象,故對紅框范圍內(南京進近01/02/03扇區)的進近航班展開研究。
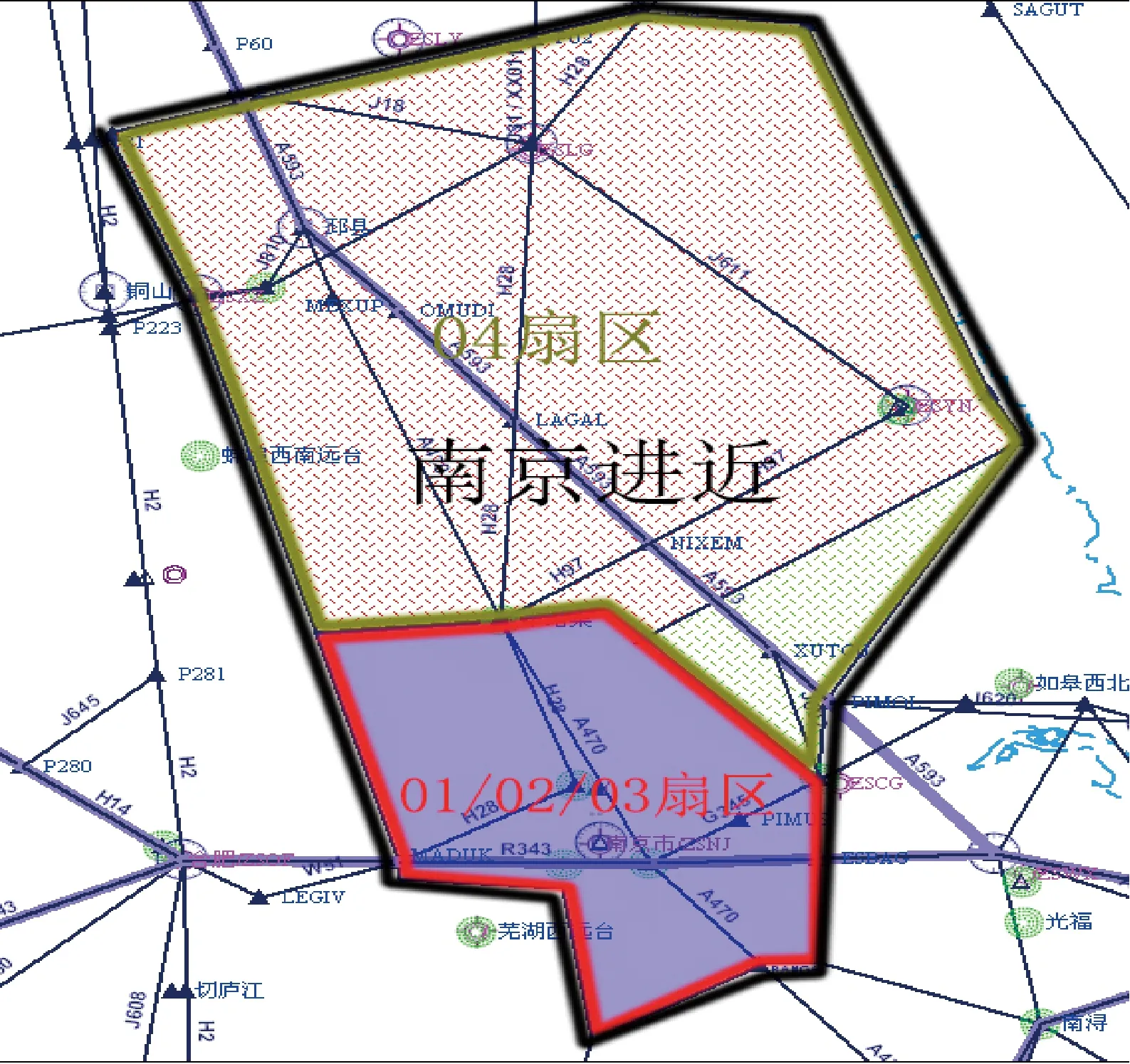
圖2 南京進近區域范圍Fig.2 Area of Nanjing approach
根據航行資料匯編數據,南京祿口國際機場的航班進出口主要有4個方向,本文分別用A、B、C、D分別表示,如圖3所示。其中,2種最常使用的進場模式為:向東運行模式(07號跑道落地、06號跑道起飛)和向西運行模式(25號跑道落地、24號跑道起飛)。向東運行模式下的航空器常規路徑有4種,路徑相對固定的;向西運行模式下的航空器常規路徑有6種,部分情況下A1和B1路徑無法使用,需采用A2、B2路徑進場。根據管制協議,不同運行模式下使用的跑道、進離場方式和航空器移交高度會有所不同。
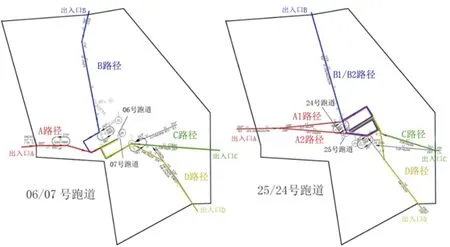
圖3 進場程序圖Fig.3 Arrival procedure charts for Nanjing approach
航班運行數據包括航班號、機型、進場點、進場高度、進場速度、進場航線、使用跑道、進場時間和落地時間,如表1所示。其中,進場速度為單位為10 km/h,進場高度基準單位為10 m。
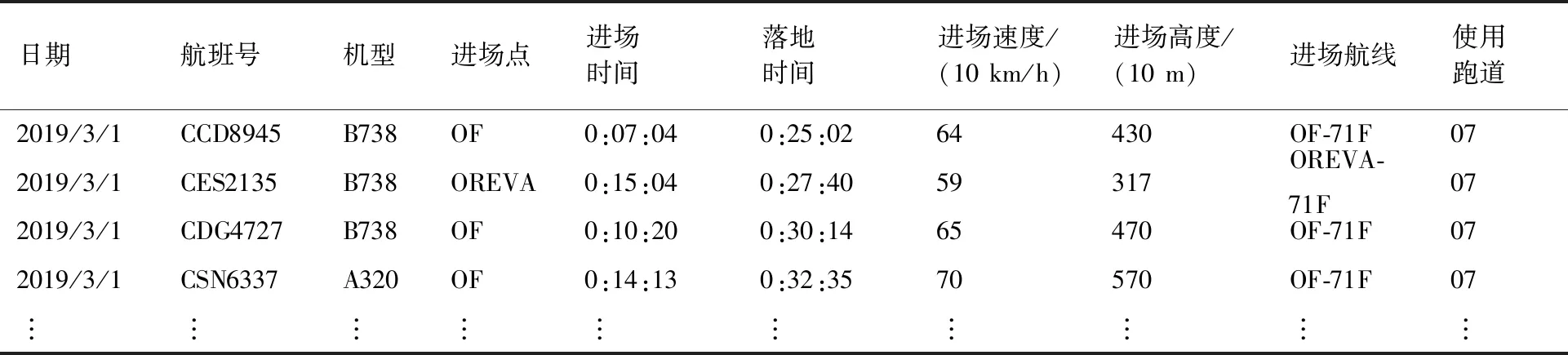
表1 航班運行數據Table 1 Flight operational data
氣象數據包括南京進近的修正海壓值、風向、風速、能見度和天氣特征,如表2所示。修正海壓值的變化會引起航空器實際飛行高度的變化,從而影響航空器的進近時間;風速、風向因素會影響飛機的地速;能見度因素會影響航空器間的進近排序間隔;天氣特征,如小雨、霧霾、晴空和雷雨等不同天氣現象影響到進場航線和空域的使用,導致進近順序和進近時間的變化。
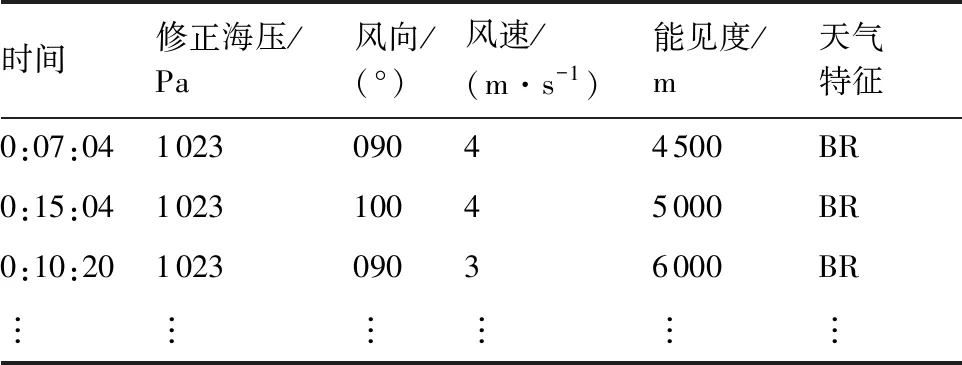
表2 氣象數據Table 2 Meteorological data
其他相關數據包括:管制班組數據和可用數據。其中,管制班組數據統計了管制員的在崗值班情況,旨在將航班運行數據與管制班組相關聯,以獲取管制員指揮差異。可用空域信息是影響航空器在進近階段飛行的重要因素,部分空域可用時會改變管制指揮方式,增加可用機動空域,顯著改變航空器的進近時間。
2.2 影響因素分析及特征提取
基于采集到的原始數據,根據航空器在進近空域飛行特點,研究并提出了影響航空器進近飛行時間的8類因素和17個特征,并對數據進行清洗和標準化。影響進近飛行時間的8類因素包括:公司因素、航空器因素、進場狀態、繁忙程度、運行模式、天氣情況、空域因素和管制員因素。
其中,公司因素旨在反應飛行員操作對進近飛行的影響,提取特征為航空器所屬航空公司。不同航空公司的飛行員操作手冊和公司管理規定會有所差異,因此不同公司的駕駛員會采用不同的調速時機和下降率,進而影響進近飛行時間。
航空器因素旨在反應不同類型航空器在進近飛行階段性能的差異,提取特征為:航空器機型。不同機型在飛機載重、最小光潔速度等性能參數上可能存在差異,可能會在飛行能力方面影響進近飛行時間。
繁忙程度旨在獲取進近空域中同時服務航空器的數量信息,提取特征包括:進場航班數量和離場航班數量。當進近空域存在多架航空器時,管制員需向航空器依次發送包括速度調整、高度調整和飛行路線調整在內的多種管制指令,以調整航空器間潛在沖突、保持安全間隔、按照指定順序依次降落。
運行模式可能影響進近飛行的路線和總距離,提取特征包括:航空器進場時所使用標準進場航線和降落時使用的跑道。
天氣情況可影響航空器的飛行性能、飛行路徑和排序間隔,提取特征包括:修正海壓值、風速、風向、能見度和天氣特征。
空域因素旨在反應當部分進近空域不可用時對航空器進近飛行的影響,提取特征為:空域受限類型。通常在進近空域內存在部分空域受限,此時管制員無法引導航空器在空域內靈活飛行,進而會影響其飛行路線和運行效率。
管制員因素旨在獲取管制員值班狀態、指揮技能、管制協同等一系列復雜的、難以量化的管制能力,提取特征為:管制班組。日常值班中,管制班組成員相對固定,不同班組間的值班習慣相對穩定,因此可用班組來分析管制員因素。研究分析出的主要影響因素及提取特征如表3所示。
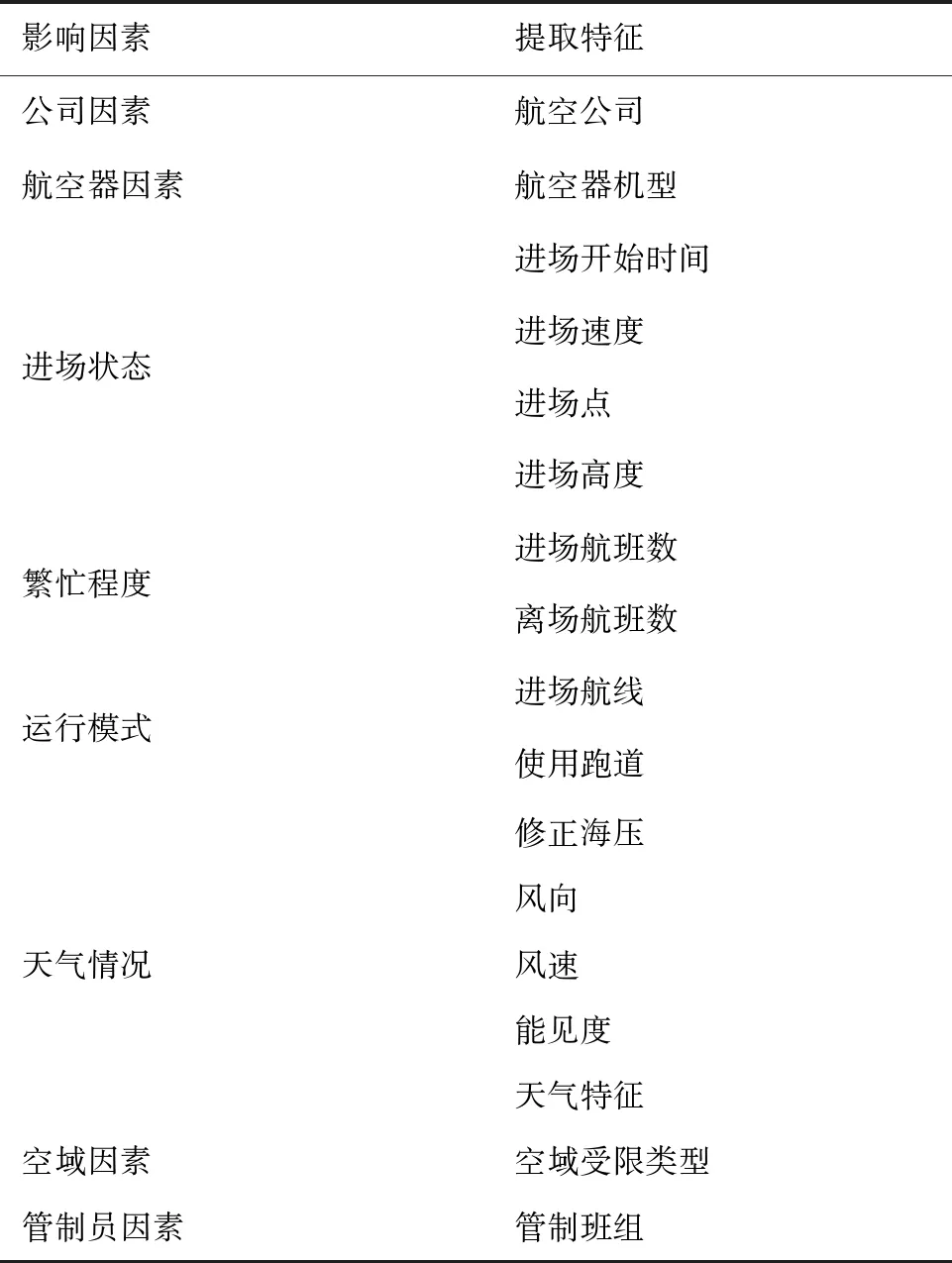
表3 影響因素與提取特征Table 3 Influencing factors and characteristics
從原始數據中提取研究所需特征,分為:定量和定性2種類型。其中,航空公司、機型、進場點、進場航線、使用跑道、風向、天氣特征、空域受限類型為定性數據,需對其進行編碼并換為定量表示。表4為對航空公司、機型和天氣情況進行的編碼示意圖,包括:在南京祿口國際機場運營的43家航空公司和17種機型,以及輕霧、晴空、無云、中雨、中雨輕霧5種常見天氣情況。
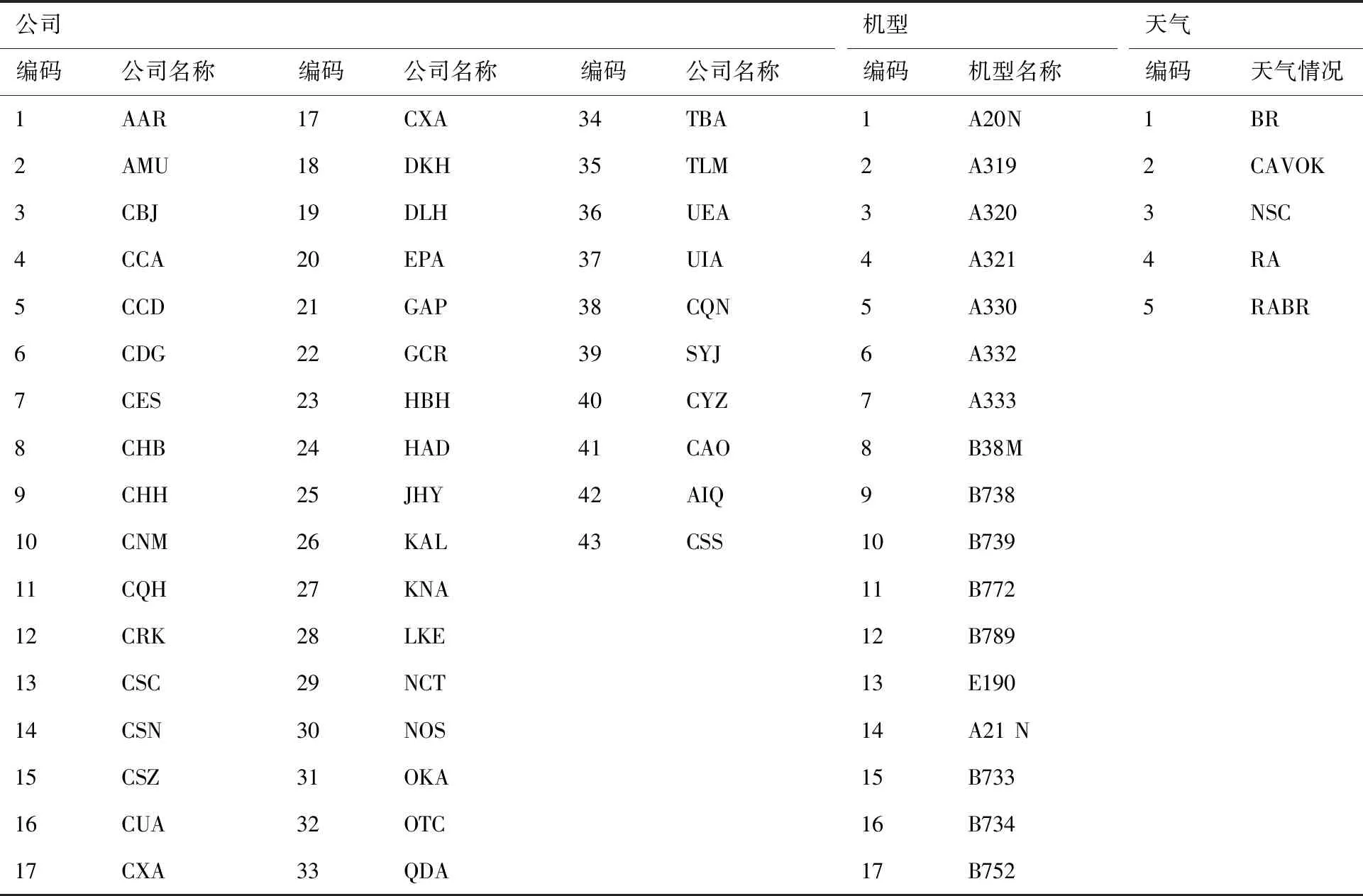
表4 數據編碼表Table 4 Data encoding table
進場開始時間、進場速度、進場高度、進場航班數、離場航班數、風速、能見度、空域受限類型、管制班組等為定量數據,但需對其進行清洗和標準化,以防止不同的量綱和量綱單位對算法性能的影響。本文采用標準化的方法對各個特征進行轉換,如式(1)所示。
2.2 病原菌排位 2012-2016年病原菌的排位中,居前三位的革蘭陰性菌依次是大腸埃希菌、肺炎克雷伯菌、鮑曼不動桿菌;居前三位的革蘭陽性菌依次是金黃色萄萄球菌、凝固酶陰性葡萄球菌、腸球菌,這六種菌占檢出菌的38.01%;真菌以白色念珠菌最常見,占檢出真菌的55.10%;具體見表2。
(1)

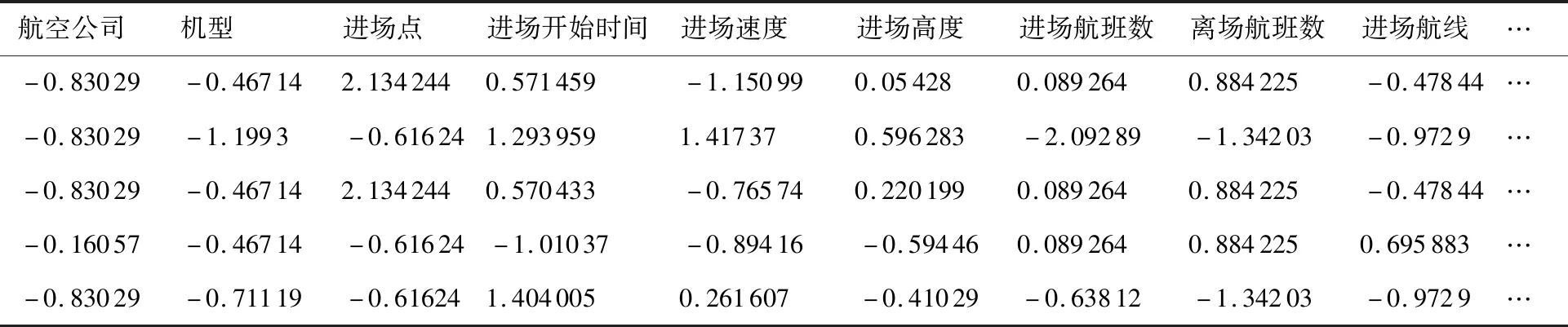
表5 數據的機器學習格式Table 5 Machine learning format of data
3 模型建立
本節將進近飛行時間預測問題轉換為機器學習中的有監督學習問題,擬基于嶺回歸、支持向量機、隨機森林和神經網絡4種機器學習算法,建立航空器進近飛行時間預測模型,用以測試和分析各種模型的預測精度和效果。
將提取的進近飛行特征與實際進近飛行時間相關聯,組成機器學習建模所需的數據集并進行劃分,進近飛行特征為2.2節提出的8類因素和17個特征。其中,航空器實際進近飛行時間,是指航空器從進入進近空域的進場點開始到航空器落地時經過的飛行時間。根據實際運行需求,本文采用分鐘作為航空器飛行時間的最小度量單位,將航空器落地時間與進場時間相減并轉化為非整數分鐘作為數據標簽,并選擇嶺回歸、支持向量機、隨機森林和神經網絡4種流行的算法進行機器學習建模,算法主要內容如下:
嶺回歸是一種可解決多重共線問題的線性回歸算法,其本質是一種改良的最小二乘估計法,以損失部分信息、降低精度為代價獲得回歸系數更為符合實際、更可靠的結果,常用于建立具有大量參數的線性模型[20]。在使用嶺回歸進行建模時,目標函數可表示為
(2)

(3)
式中:I為單位矩陣;λ作為參數可用以平衡模型的方差和偏差。在模型優化過程中,可通過優化拉格朗日乘子λ和求解器算法等來改進模型預測結果。
支持向量機(SVM)是一種非常流行的監督學習方法,可用于分類問題和回歸問題,具有良好的泛化能力,可嵌入更高維度的空間,在靈活表示復雜函數的同時可以抵抗過度擬合。支持向量機回歸是由Cortes和Vapnik提出[21],算法通過構造極大邊距分離器、生成線性分離超平面、采用非參數方法建立回歸模型。支持向量機的基本理念是考慮一個n維歐式空間中的超平面(線性函數),如式(4)所示:
〈w,x〉+b=0
(4)
(5)
約束條件為
(6)

隨機森林一種魯棒并且實用的決策樹學習方法,通過訓練多個弱模型(決策樹)來組成一個強模型,屬于一種集成的機器學習方法[22]。在訓練階段,隨機森林采用bootstrap采樣方法從訓練集中采集不同子集來訓練多個不同決策樹;在預測階段,隨機森林將內部多個決策樹的預測結果取平均作為最終結果。
以二叉決策樹為弱模型為例,在訓練階模型的時候需要考慮怎樣切分變量(特征)和切分點,以及怎樣衡量一個切分變量和切分點的好壞。其中,針對切分變量和切分點的好壞,一般以切分后節點的不純度來衡量,即各個子節點不純度的加權和G(xl,vlk),計算公式為
(7)
式中:xl為切分向量的一個特征;vlk為切分變量的一個切分值;nleft、nright和Ns分別為切分后左子節點的訓練樣本個數、右子節點的訓練樣本個數以及當前階段所有訓練樣本個數;Xleft、Xright分為左右子節點的訓練樣本集合;H(X)為衡量節點不純度的函數,常用的回歸不純度函數包括平方平均誤差(MSE)和絕對平均誤差(MAE)。MSE計算方法是求預測值與實際值之間距離的平方和,其數值越小則表明模型的預測精度越高。MAE旨在測量預測值和實際值之差的絕對值之和,能更好的反應實際問題預測結果的好壞。MSE和MAE計算方法如式(8)和式(9)所示:
(8)
(9)

(10)
在基于隨機森林算法的模型優化中,可調整的主要參數包括:決策樹的最大深度、特征值數量、葉子樹的最大樣本數、葉子節點樣本數、決策樹的個數等。
神經網絡是一種模仿動物神經網絡行為特征,進行分布式并行信息處理的數學模型,也是一類常見和有效的機器學習系統[23]。神經網絡具有很強的非線性映射、自適應、容錯性和泛化能力,其基本結構由非線性變化單元組成,包括:輸入層、隱含層和輸出層。以xi表示特征向量樣本,神經網絡輸出可表示為
(11)
式中:M和N分別為隱含層和輸入層節點數;wji和bi為從輸入層到隱含層的權重系數和偏置;aj和c為從隱含層到輸出層的權重系數和偏置;fj表示激活函數,通常采用連續、光滑且處處可導的sigmoid函數。為最小化預測模型結果的誤差,以yi表示樣本觀察值,基于神經網絡的機器學習模型可轉化為最小均方誤差問題,
(12)
其中,激活函數對算法收斂的速度和效果有顯著影響,在設定激活函數后我們可以通過改變運算器、隱藏神經網絡層數和最大迭代次數的設定來改進模型預測結果。
4 實例分析
本文采集的數據為2019年3月份到達南京祿口國際機場的進近航班數據,采用分時段的方式從雷達管制自動化系統中采集,共計3 015條。在數據實際采集過程中,航空器經過進場點的位置通常會有偏差,本研究采用在進場點劃設等時線的方法,統一了航空器達到進場點時間的計算方式,并剔除了少部分明顯無法判定進場點的特情航班[13]。同時,為防止落地時間統計錯誤,本研究對航空器距離落地點10 km處的時間也進行記錄,方便后續對數據正確性的校驗和修正[14]。
4.1 性能指標選取
為保證所建模型可以無偏的預測航空器進近飛行時間,本實例將采集到的數據集合劃分為:訓練集、驗證集和測試集3類。其中,訓練集用以訓練機器學習模型的參數,驗證集用于無偏的評估模型效率和調節超參數,測試集用以測試最終的模型性能。本實驗的數據集合的劃分方式如圖4所示:隨機劃設20%原始數據為測試集,如灰色所示;剩余的數據采用10-折交叉驗證的方法,90%為訓練集(淺灰色部分),10%為驗證集(藍色部分)。其中,隨機森林采用集成學習的裝袋(Bagging)模型,以100棵決策樹為模型構建Bagging集成,通過從原始訓練集中有放回的隨機重復采樣,并每次從原始特征集的29個特征中隨機抽取20個特征進行模型的訓練。
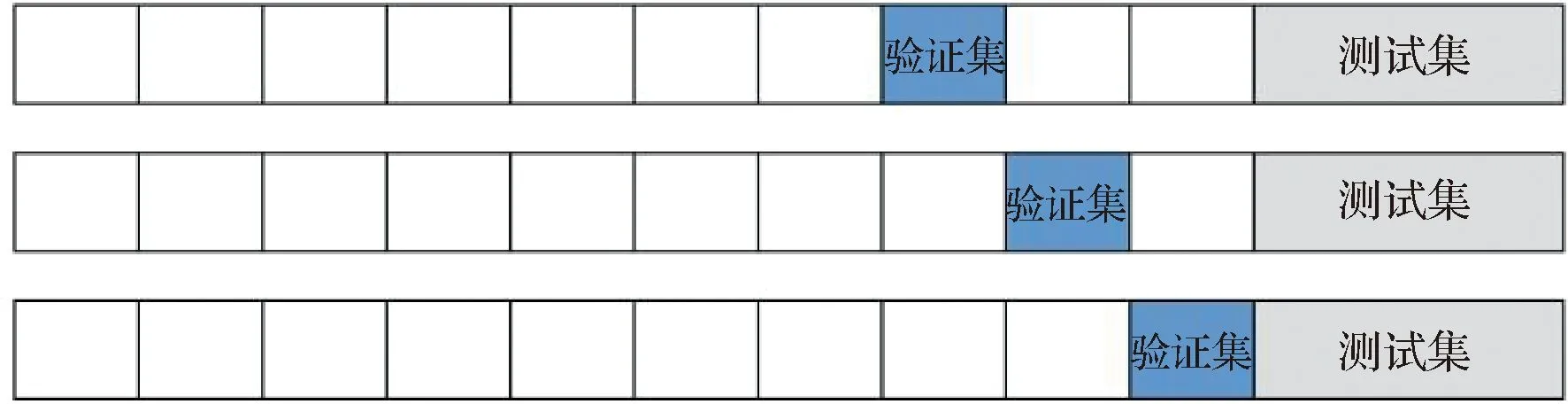
圖4 本文數據集劃分方式Fig.4 Dataset division method in this study
實驗結果首先采用調整決定系數(AdjustedR2)來衡量各模型的回歸效果是否顯著。通常,決定系數(R2)值可用于評估回歸模型擬合效果,其定義為回歸平方和與總離差平方和的比值。該值越大則表示模型越精確,回歸效果越顯著。然而,R2值會隨著模型特征增加而增加,且與樣本量也有一定關系,進而造成擬合度的虛假提升。因此,本文采用調整決定系數來衡量擬合效果,該值介于0~1之間,越接近1,回歸擬合效果越好,一般認為超過度0.8的模型擬合優度比較高。R2的計算方法為
(13)
AdjustedR2值的計算方法為
(14)
4.2 性能指標分析
本實驗采用網格搜索方法實現超參數優化,不同模型在驗證集與測試集上的調整決定系如表6 所示。總體來說,測試集與驗證集的調整決定系數值相近,即表明模型的泛化能力較好。根據測試集實驗結果,基于隨機森林預測模型的調整決定系數為最高值0.991 2,模型的精確度高,回歸效果越顯著。基于嶺回歸的預測模型的調整決定系數為最低值0.516 6,模型的精度較低,回歸效果較差。支持向量機和神經網絡模型的精度和回歸效果總體也較好,調整決定系數分別為0.984 4 和0.979 6。
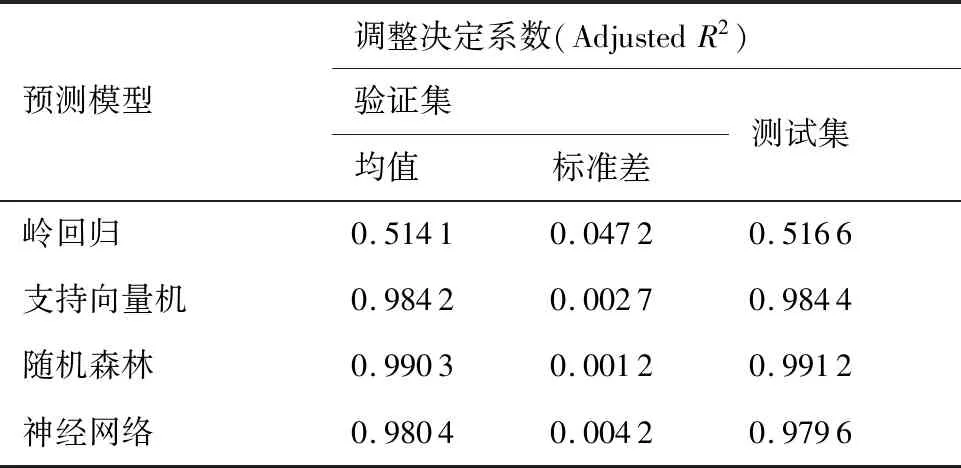
表6 不同模型在驗證集與測試集上的調整決定系數R2Table 6 Adjusted R2 score of different models on validation set and test set
表7顯示了4種模型的MSE和MAE值。其中,基于隨機森林的預測模型的結果最好,MSE和MAE值同為最低,分別為0.07和0.18 min。嶺回歸效果最差,MSE和MAE值分別為4.11與1.54 min。支持向量機和神經網絡的預測效果也較好,但損失函數均略高于基于隨機森林的模型。該表同時表明,基于本文提出特征建立的預測模型,最優模型的平均預測偏差為0.18 min(10.8 s)。與現有理論和實際指標比較,南京進近管制自動化系統3月份實際預測偏差為1.8 min(108 s);基于行為驅動的方法,在不考慮飛行意圖變化的情況下,最小預測偏差為11.33 s[10],而現有基于數據驅動的方法較小預測偏差分別為106.8 s和135.62 s[12-16]。
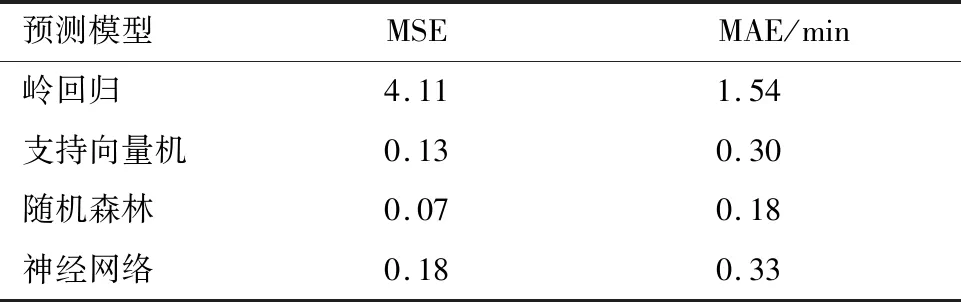
表7 不同模型的預測性能Table 7 Prediction performance of different models
圖5為4種算法在測試集上誤差絕對值的累計分布情況。由圖可見,隨機森林模型累積分布曲線(綠色)上升最為陡峭,表明該模型的誤差絕對值整體較小。支持向量機模型的累積分布曲線(黃色)上升陡峭度略低,表明其誤差絕對值整體大于隨機森林模型;然而,需要關注的是支持向量機模型誤差絕對值的最小值比隨機森林模型的更小,體現了其在預測最差情況下具有一定優勢。神經網絡模型的誤差絕對值分布與支持向量機模型相近,但誤差絕對值的最大值在2 min以上。嶺回歸的誤差絕對值分布最為分散,最大誤差值在8 min以上,說明該預測模型的魯棒性較差。圖6以實際進近時間樣本數據為橫坐標,觀察誤差絕對值的分布情況。由圖可見,嶺回歸模型預測誤差絕對值整體都較大,神經網絡模型在實際進近時間為17~20 min出現部分較大誤差,隨機森林在15和20 min樣本點出現了較大誤差值,支持向量機模型整體穩定性最好。

圖5 測試集上誤差值的累積分布Fig.5 Cumulative distribution of errors on test set
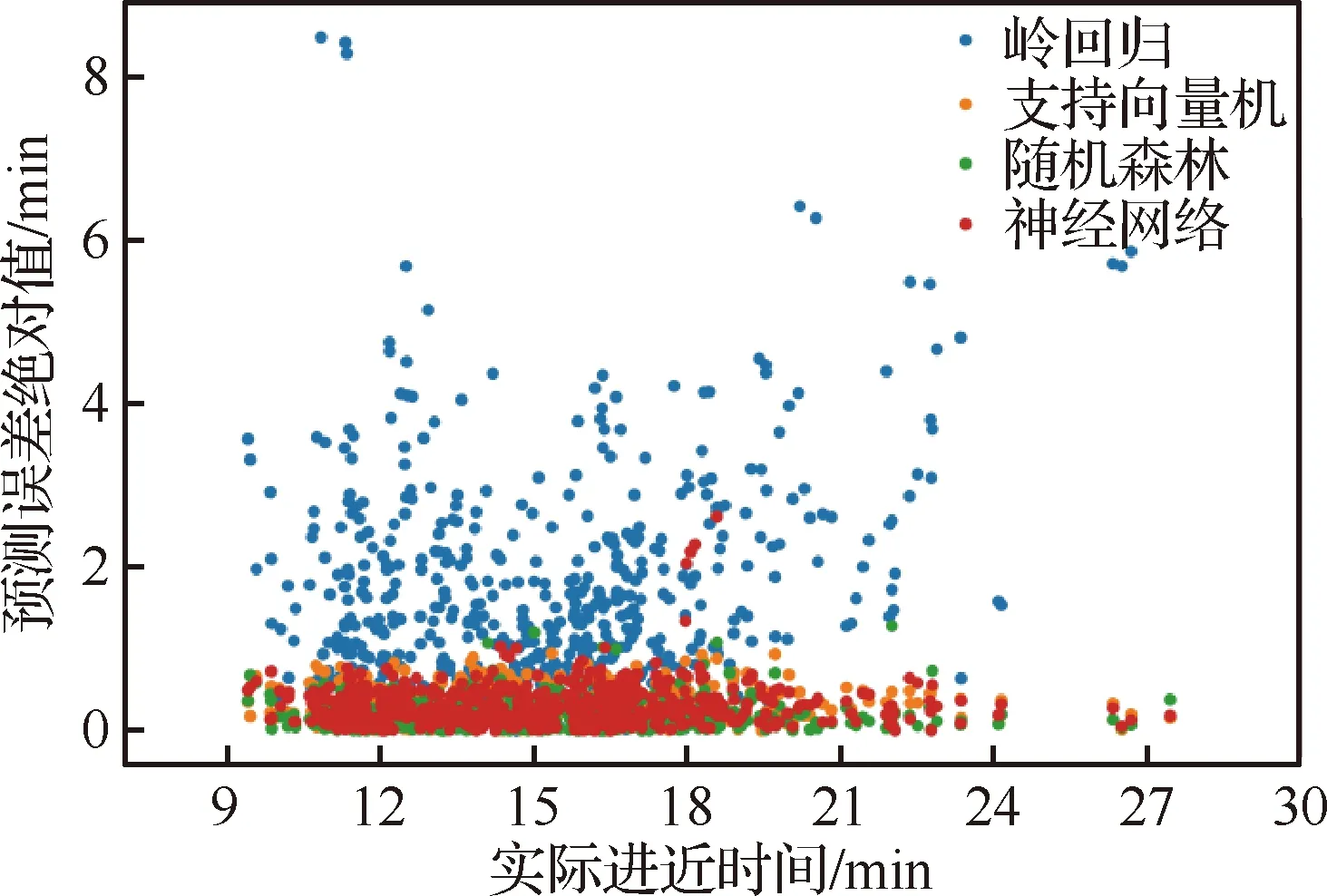
圖6 預測誤差絕對值隨實際進近時間的分布散點圖Fig.6 Prediction error values of proposed models with actual approach time
4.3 特征及影響因素分析
本節將實驗結果與實際相結合,分別對預測模型17個特征的重要程度和8類因素展開分析,旨在進一步探討影響進近飛行時間的內在原因。
圖7以預測性能最好的基于隨機森林的進近飛行時間預測模型為基礎,對提出特征重要度展開分析。其中,特征重要度以Gini系數進行衡量,取值為0~1之間,數值越大表明該特征對預測結果貢獻程度越大。由圖10可見,進場點是最為重要的特征,特征重要度在0.2以上,該特征屬于航空器進場狀態因素,與進近飛行的水平距離與較大關系。進場高度和進場航班數是特征重要度在0.1~0.2之間的2個特征,與進近飛行需要下降的高度和管制員需同時指揮進近的航空器數量有關。進場開始時間和風速是排序第4和第5重要的特征,特征重要度在0.05~0.1之間,表明進近飛行時間可能存在繁忙時段,且風速對飛行還是存在明顯影響。另外,值得關注的是管制班組特征,該特征重要度是17個特征中最小的,表明管制班組間差異性并不明顯,這應該與管制員長期嚴格與專業的訓練有關。

圖7 17個特征的預測特征重要度Fig.7 Prediction importance of 17 features
圖8將17個特征重新并入8類影響因素,生成因素權重圖以定量分析各類因素對預測結果的影響程度。由圖可見,進場狀態時對航空器進近飛行時間影響最大的因素,占比達到60.83%;繁忙程度、天氣情況和公司因素影響也較大,占比分別為12.59%、10.58%和8.81%;航空器因素、空域因素、運行模式和管制員因素占比較小,分別為4.27%,1.49%,1.37%和0.06%。
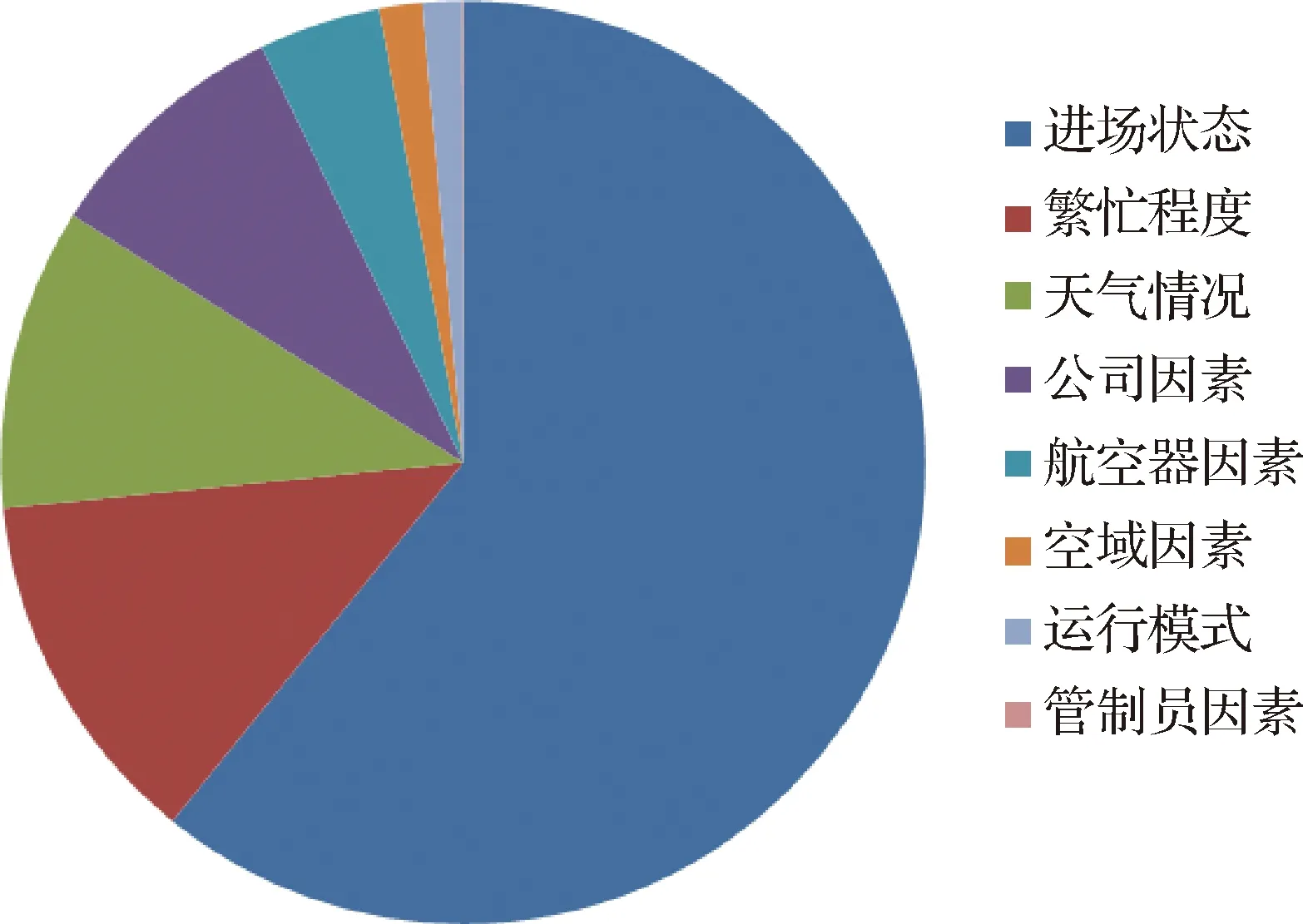
圖8 因素權重圖Fig.8 Factor weight chart
結合實際進近階段的飛行特點,對8類因素的影響程度進行分析。航空器在進入進近管制空域后,為避免與其他航空器產生沖突風險,管制員通常按照 “先到場先進近”的原則對其進行排序,依次指揮航空器調整飛行高度和速度,沿標準儀表進近程序或雷達引導路徑飛行并降落。
進場狀態因素中的進場點、進場高度和進場速度基本決定了航空器在進近過程中的水平、垂直飛行距離和平均飛行速度,而進場開始時間則與管制工作繁忙程度存在一定關聯,進而成為影響進近飛行的最重要因素。繁忙程度因素中的進場航班和離場航班數量,是反映進近管制空域繁忙程度的重要特征,該特征決定航空器在進近過程中是否需要進行減速、排序和空中等待,是實際運行中重點關注的因素。天氣情況應該通常是一個影響進近飛行的重要因素,雖然實驗采集的數據為南京進近3月份的數據,天氣情況相對良好,但也占據了10%以上的權重;而當雷雨、低能見度等特殊天氣現象發生時,天氣情況對航空器進近飛行時間的影響還應更為顯著。公司因素和航空器因素主要體現在不同公司的操作規章、駕駛習慣和航空器運行性能上,由圖可見這幾個因素對航空器的進近時間還是有明顯影響。空域因素是本次研究較為關注的問題,然而結果顯示其權重遠低于預期,一方面應該是因為3月份空域占用活動較為簡單,基本是常規空域活動,另一方面隨著中國近年來空域精細化管理的進程不斷推進,常規空域活動對民航航班飛行影響正在逐漸減小。運行模式和管制員因素是權重最小的2個因素,由于南京進近中相同進場點的不同進場航線距離差距不大,管制員在管制過程中基本都遵循相同的原則,因此這2個因素對結果影響不大。
5 結 論
1) 研究航空器在進近空域飛行的實際特點,提出了影響航空器在進近空域運行的8類因素和17個特征,可以于分析航空器在進近管制空域飛行時間產生差異的原因。
2) 基于提出的17個重要特征,以航空器在進近飛行時間為標簽,采用嶺回歸、支持向量機、隨機森林和神經網絡算法,建立了4種基于機器學習的航空器進近飛行時間預測模型。
3) 以南京進近為實例,對4種機器學習模型進行訓練、驗證和測試,對模型的性能指標、特征重要性和影響因素展開分析,模型可以為空中交通管理理論研究和實際管制指揮提供支持。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中老年保健(2022年5期)2022-08-24 02:36:04
當代陜西(2021年12期)2021-08-05 07:45:46
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
光學精密工程(2016年6期)2016-11-07 09:07:19
冰雪運動(2016年4期)2016-04-16 05:54:56
