STEAM教學(xué)中學(xué)生工程建構(gòu)能力培養(yǎng)
2020-11-09 03:35:37鄒衛(wèi)華
中國信息技術(shù)教育 2020年20期
鄒衛(wèi)華
中小學(xué)STEAM教學(xué)在開展中,因為受各種因素的影響,基本偏重編程平臺的程序設(shè)計或3D打印模型設(shè)計等,而對工程建構(gòu)、特別是實物構(gòu)造的能力培養(yǎng)非常不足。STEAM教學(xué)中通常存在一個非常重要的工程建構(gòu)的實體對象——Robot(機器人),如果讓學(xué)生了解機器人搭建,學(xué)習(xí)機器人搭建,進而能搭建出一個行動靈巧、體型百變的機器人,則可以使學(xué)生從知識到應(yīng)用,從設(shè)計到創(chuàng)造,充分經(jīng)歷STEAM教學(xué)的工程建構(gòu),并以此培養(yǎng)工程創(chuàng)新、創(chuàng)造力。更重要的是,在完善模型的結(jié)構(gòu)搭建中,涉及物理學(xué)中的力學(xué)、運動學(xué)、機械學(xué),以及數(shù)學(xué)中的幾何學(xué)等知識,這些知識只有在搭建中讓學(xué)生形象感知并實際運用,學(xué)生才能深入理解。
搭建機器人的“身軀”——學(xué)會構(gòu)造良性主體結(jié)構(gòu)
機器人無論形態(tài)如何變化,都需要有一個“身軀”——主體結(jié)構(gòu)。一個性能良好的主體結(jié)構(gòu),需要具備以下三點要求——穩(wěn)固、靈巧、平衡,這是機器人主體結(jié)構(gòu)搭建中三個最重要的因素。
1.結(jié)構(gòu)的穩(wěn)固
不論哪種機器人,其主體的穩(wěn)固性是第一位的,這是機器人完成任務(wù)最基本的要求。然而在實際教學(xué)中,經(jīng)常出現(xiàn)學(xué)生搭出的機器人很漂亮、很有創(chuàng)意,卻會掉胳膊掉腿,或一碰就散架等情況,這是因為搭建機器人的積木顆粒有一個較大的缺陷:結(jié)構(gòu)搭建不穩(wěn)固就容易散架。因此,教師需要教給學(xué)生一些穩(wěn)定性結(jié)構(gòu)的方法,促使學(xué)生去鉆研機械的支撐結(jié)構(gòu),想辦法使其結(jié)構(gòu)牢固。以下是幾個比較好的解決方法。
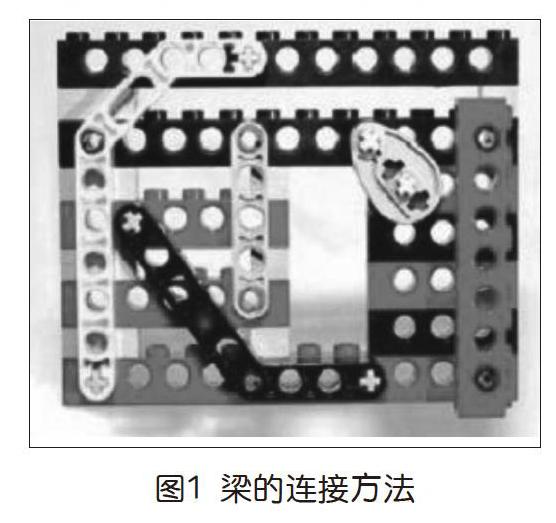
①善用“梁”。圖1顯示了梁的許多連接方法。最常用的一種方式是水平梁與垂直梁交叉搭建,用垂直的梁將與之連接的兩根水平梁之間的積木鎖住,這樣可以搭建出堅固的模型。水平梁與垂直梁互鎖實現(xiàn)的順序是:一根梁,兩塊板子,再一根梁,再兩塊板子……可以利用兩根梁之間加一層板的方式,將兩組梁疊在一起,這樣就可以得到一個底盤,有了底盤,結(jié)構(gòu)就非常結(jié)實了。
②善用分層結(jié)構(gòu)。合理的分層結(jié)構(gòu)可以使機器人結(jié)實。用梁和板子分層疊放,再用垂直的梁加固,可以得到輕巧、穩(wěn)固的結(jié)構(gòu)。結(jié)構(gòu)的穩(wěn)定并不一定需要很多組件,而在于設(shè)計中的技巧。
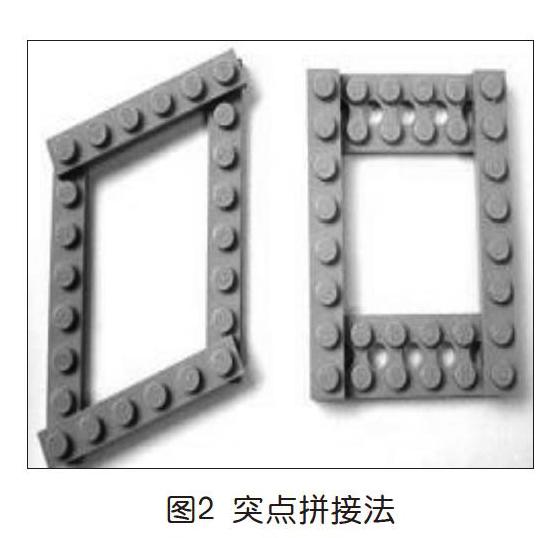
③善用突點拼接。如下頁圖2所示,左邊僅連接一個突點的結(jié)構(gòu)(左)會導(dǎo)致結(jié)構(gòu)扭曲變形,右邊的結(jié)構(gòu)則明顯穩(wěn)固。這能讓學(xué)生明白,兩點支撐與多點支撐在結(jié)構(gòu)穩(wěn)定性中所起的作用的科學(xué)道理。
④善用銷固定。銷是連接固定常用的器件,適用于需要不同聯(lián)結(jié)緊密度的地方,但它的直徑有大有小,這時可以提醒學(xué)生注意銷直徑大小帶來的不同摩擦力,如在連接梁固定時,應(yīng)選更大摩擦力、與梁配合更緊密的銷;而在可轉(zhuǎn)動連接時應(yīng)選摩擦力小的銷,如做杠桿與臂。
2.結(jié)構(gòu)的靈巧
正如變形金剛一樣,機器人的形體往往會隨著任務(wù)的變化而變換結(jié)構(gòu),但又不可能在每次機器人需要形體發(fā)生變化時全部重新搭建,所以結(jié)構(gòu)的設(shè)計要便于安裝和拆卸。最好的方法是將機器人模塊化,即將積木顆粒組建成各類模塊型結(jié)構(gòu),實現(xiàn)模塊部件。如果說整個機器人是一個完整的系統(tǒng),那么這些模塊部件就是子系統(tǒng)。可以要求學(xué)生對以下一些部件進行模塊化設(shè)計,以便將來拆裝某些組件時無需將整個機器人拆散與重構(gòu)。
①將主機、電源模塊化。機器人的動力之源是“主機+電源”,這兩者就是一個子系統(tǒng)。在搭建過程中,這個子系統(tǒng)會被頻繁拆裝,這是因為:電源需要不斷更換;主機是最貴重的部件,數(shù)量較少,會將其分別搭建在很多個機器人上。因此,在主機上加上幾個簡單的銷與梁,組建成一個可以在不同機器人框架上進行安插、拆卸的部件系統(tǒng),就變得非常必要。
②將傳動部件模塊化。機器人最復(fù)雜的組件搭建之一是傳動裝置,如導(dǎo)向輪、升降機、機械臂(爪)、差速器等,而這些部件往往是根據(jù)某種科學(xué)定律搭建出來的,搭建麻煩但通用性較高,當把它們模塊化后,就能方便地從這個機器人身上拆裝到另一個機器人身上。
③將傳感部件模塊化。傳感器也是機器人中的貴重部件,且是用于接受外來信號的,往往安裝在機器人結(jié)構(gòu)的最外層。將傳感器與積木搭成一個安插部件很有必要,同時這個部件系統(tǒng)要考慮到傳感器聯(lián)接主機的數(shù)據(jù)線的排放。
④將載物部件模塊化。機器人完成任務(wù)時最常用的子系統(tǒng)就是載物部件了。可以鼓勵學(xué)生發(fā)揮想象力,盡可能多地搭建出各種形體的載體部件,當遇上某種取物、送物任務(wù)時,就能馬上應(yīng)用。
⑤將支撐框架模塊化。支撐框架是機器人主體的聯(lián)結(jié),將其模塊化的最大好處是,方便將以上各類子系統(tǒng)進行安插與拆卸。如果設(shè)計得巧妙,不僅機器人穩(wěn)固靈巧,安裝拆卸更是省時省力。
3.結(jié)構(gòu)的平衡
機器人的一個最大特點是會“動”,動就必然涉及一個特性:平衡。無論是車輛類機器人還是步行爬行類機器人,結(jié)構(gòu)的平衡是行動的先決條件,尤其是搭建步行機器人,平衡問題是至關(guān)重要的。
①調(diào)校底盤。一個平穩(wěn)的底盤是整個機器人平衡的基石,是保證機器人(尤其是車輛類機器人)平衡的關(guān)鍵所在。搭建(調(diào)校)好了一個四平八穩(wěn)的底盤,就很容易再安裝輪子或齒輪,這樣學(xué)生就很容易用數(shù)顆粒單位來分辨出前后左右的重量分布。
②講究對稱。機器人在運動時,如前進、后退、轉(zhuǎn)彎、轉(zhuǎn)圈等,會受到負載和慣性的影響,在搭建時,如果沒有特殊需求,建議以對稱結(jié)構(gòu)為主。對稱的結(jié)構(gòu),可以平衡負載,也可以將慣性的影響降到最小。
③追求低重心。機器人的運動速度往往是比較快的,尤其是還會有加速、減速等過程,由于慣性的作用,機器人往往會失衡,這時最好的方法就是盡量降低機器人的重心,以減小慣性帶來的不穩(wěn)定性。
④減輕重量。由于常強調(diào)使用梁與板來使機器人穩(wěn)固,學(xué)生會常常使用大量的梁、板,只是這樣會大大增加機器人的重量,反而不利于機器人的平衡。所以也要讓學(xué)生明白,能用一根梁固定的,就盡量不要用第二根。相對來說,結(jié)構(gòu)使用組件少,重量更輕,利于機器人平衡。
搭建機器人的“腳”——學(xué)會構(gòu)造靈活驅(qū)動裝置
傳動裝置是機器人的“腳”,是機器人“行動”起來的基礎(chǔ),這也是所有結(jié)構(gòu)中最靈活的構(gòu)建,學(xué)生構(gòu)建過程中需要使用齒輪、軸、渦桿、滑輪、鏈等部件,巧妙合理的組合才能讓機器人實現(xiàn)各種運動。教學(xué)中,組合是關(guān)鍵,雖然沒有必要讓學(xué)生深刻理解各類運動部件中的數(shù)理分析,但需要讓他們認識現(xiàn)象,由感知而理解。
1.齒輪的組合搭建
齒輪是機器中很重要的部件,它幾乎是機器的象征。單個齒輪幾乎沒有實際意義,但組合起來卻能產(chǎn)生奇妙的運動。沒必要讓學(xué)生懂得相互嚙合二齒輪之間的扭矩和角速度的等式關(guān)系等,但可以通過反復(fù)拼裝試驗,讓學(xué)生逐漸感知這些組合實現(xiàn)的傳動效果。例如,相互嚙合的齒輪,當一個齒輪轉(zhuǎn)動時,會帶動另一齒輪轉(zhuǎn)動,當一個齒輪順時針轉(zhuǎn)動時,會帶動另一個齒輪逆時針轉(zhuǎn)動;當大齒輪帶動小齒輪時,可以實現(xiàn)“加速”,當一個小齒輪帶動一個大齒輪時,可以實現(xiàn)“減速”。這樣的實踐過程,會讓學(xué)生明白齒輪是用于改變曲軸或軸間轉(zhuǎn)動的速度和扭矩的科學(xué)道理,對培養(yǎng)學(xué)生機械工程的制造思維非常有幫助。
2.較特殊的傳動方式搭建
利用齒輪有一些應(yīng)用也很難實現(xiàn),這時可以利用其他的傳動器件來進行彌補,教師需要讓學(xué)生在拼裝調(diào)試中了解這些器件的性能并靈活運用。例如鏈條,鏈條有鏈節(jié)鏈條和履帶式鏈條兩種,采用了同一種傳動原理,可以拼接成任意長度,這樣就可以連接間距較大的軸。鏈條還可以增大受力面、加大摩擦力、防止打滑等。又如滑輪與皮帶,既能傳動,又因其有打滑功能能保護馬達不受損。再如渦桿,可以把圓周運動變?yōu)橹本€運動;渦輪適用于大比例減速力矩的場合,它還有的“自鎖”功能——可以驅(qū)動小齒輪(正齒輪),但是小齒輪不能驅(qū)動渦輪。學(xué)生明白了這些較特殊的傳動器件的性能,就能根據(jù)實際需求,實現(xiàn)種種傳動效果,而這些效果常常會給人帶來出乎意料的精彩。
搭建機器人的“手”——學(xué)會構(gòu)建精巧動力爪臂
如果說有“腳”,是機器人實現(xiàn)類人運動的第一步,那么有了“手”,才是機器人模仿人類完成如抓、取等動作的關(guān)鍵一步。精巧的機械手,是要能模仿真實手的功能,如抓、搬、舉、拿、壓、夾、捏、推、拉等。在實際的搭建中,拼裝出一個機械臂是比較容易的,難的是“抓”,如何用“爪”來“握”住物體。一般來說,機器爪的“抓”力來自馬達,教師在教授學(xué)生搭建時,要讓學(xué)生解決力的方向問題,如通過渦輪和傳動軸將馬達的旋轉(zhuǎn)運動變成直線運動,就能實現(xiàn)抓取的控制動作。需要明確的是,機械爪(臂)一般都是根據(jù)杠桿原理來搭建,所以在指導(dǎo)學(xué)生搭建時,應(yīng)先讓學(xué)生仔細分析實現(xiàn)任務(wù)所需要的抓取力的三個要素——運動方向、作用點和力的大小,然后再根據(jù)杠桿原理來設(shè)計合適的爪。不能盲目搭建,應(yīng)在思考中實踐,這樣才有助于培養(yǎng)學(xué)生在感性的搭建中形成對“力學(xué)”的理性認知。
結(jié)語
“智慧出在手指尖上”——這句話用來形容學(xué)生學(xué)習(xí)機器人的構(gòu)建非常適合。STEAM教學(xué),注重對學(xué)生工程建構(gòu)能力的實際培養(yǎng),讓學(xué)生手上可以搭建出無數(shù)的形體,實現(xiàn)各類運動方式,真正培養(yǎng)學(xué)生的創(chuàng)新精神與實踐能力。
猜你喜歡
海洋信息技術(shù)與應(yīng)用(2022年1期)2022-06-05 07:38:22
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
現(xiàn)代裝飾(2020年5期)2020-05-30 13:01:56
中華詩詞(2019年7期)2019-11-25 01:43:04
作文世界(小學(xué)版)(2018年4期)2018-10-16 17:13:34
中國核電(2017年2期)2017-08-11 08:00:56
流程工業(yè)(2017年4期)2017-06-21 06:29:50
快樂作文·低年級(2016年12期)2017-01-03 20:52:44
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
快樂作文·低年級(2016年6期)2016-06-24 18:58:40
