雙目視覺技術在變電站刀閘狀態圖像識別中的應用研究
2020-11-11 07:37:22黃德華
通信電源技術 2020年14期
黃德華
(廣東電網有限責任公司肇慶供電局,廣東 肇慶 526060)
0 引 言
隔離開關(俗稱“刀閘”)是高壓開關電器中使用最多的一種電器,工作原理及結構比較簡單。由于使用量大和工作可靠性要求高,它對變電所、電廠的設計、建立以及安全運行的影響較大[1]。目前,倒閘操作是變電站日常運行中最重要的運維內容之一。倒閘操作的成功與否直接關乎到電網的安全運行[2]。現階段,多采用人工現場觀測和主觀判斷的手段,費時、費力且效率低,尤其是位置偏遠的變電站,且易受到觀測者的主觀影響。本文使用雙目視覺技術識別刀閘狀態,使圖像識別由定性分析演變為定量分析,可為變電站智能化操作提供可靠判據,推動變電站的無人化進程。
1 雙目視覺技術原理
雙目立體視覺基于視差原理,由多幅圖像獲取物體三維幾何信息[3]。實際操作中,雙目視覺一般由兩個攝像機從不同角度同時獲取被測目標的兩幅數字圖像。兩個攝像機和被測目標三者之間構成一個完整的三角形。已知兩個攝像機的空間位置,通過三角幾何原理計算和重構,獲取兩個攝像機公共視場內任意目標物體的三維幾何信息。
圖1為簡單的雙目視覺技術原理圖。兩攝像機的投影中心連線的距離,即基線距離B。左右相機在同一時刻觀看時空物體的同一特征點P,相當于人的“左眼”和“右眼”獲取了點P的圖像。點P在左右相機的成像點坐標分別為Pleft(Xleft,Yleft)和Pright(Xright,Yright)。將兩攝像機固定在同一平面上,則點P的成像坐標的Y坐標是相同的,即Yleft=Yright=Y。根據三角幾何原理,視差是同一個空間點在兩個相機成像中對應的X坐標的差值,即Disparity=Xleft-Xright,則點P在左相機坐標系下的位置可以表示為:
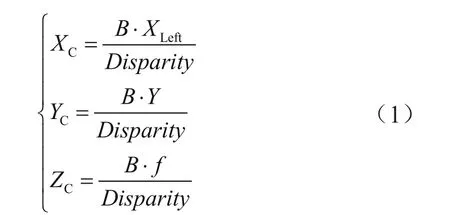
因此,對于空間中任意一點,只要左攝像機像面上的任意一點能在右攝像機像面上找到對應的匹配點,就完全可以計算該目標點的三維坐標。這種方法是點對點的運算,像平面上所有點只要存在相應的匹配點,就可以參與上述運算,從而獲取對應的三維坐標。
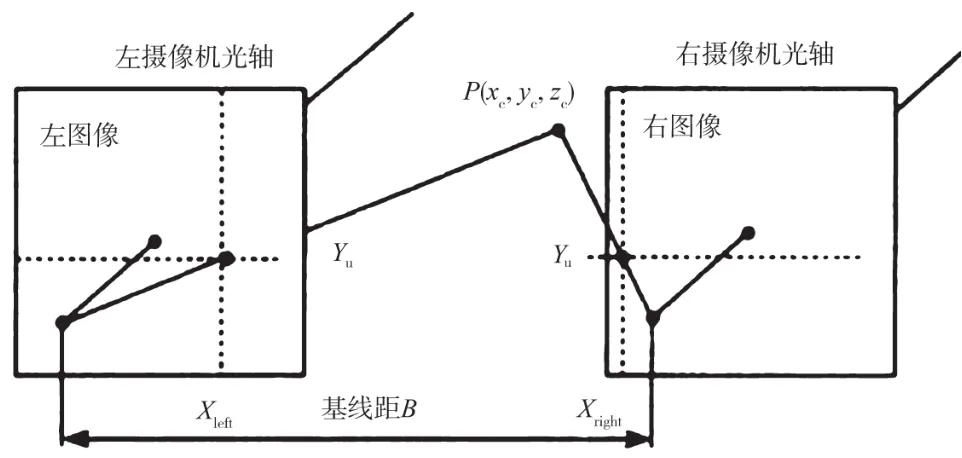
圖1 雙目視覺技術原理
2 基于雙目視覺的變電站刀閘狀態圖像識別
基于雙目視覺的變電站刀閘狀態圖像識別的前端采集裝置,是兩個高清攝像頭組成的雙目視覺裝置,通過固定架安裝在隔離開關附近的預設位置上。在采集刀閘及其靶標的左右攝像頭圖像后,通過交換設備傳輸網絡將采集到的圖像輸入到設置在總控室的計算分析系統,然后系統對所述刀閘和靶標圖像進行計算處理。通過提取刀閘圖像上的目標靶標位置,尋找兩個攝像頭圖像當中的同名點并建立對應的坐標關系,從而計算兩個同名點之間的距離。圖2為刀閘靶標位置示意。
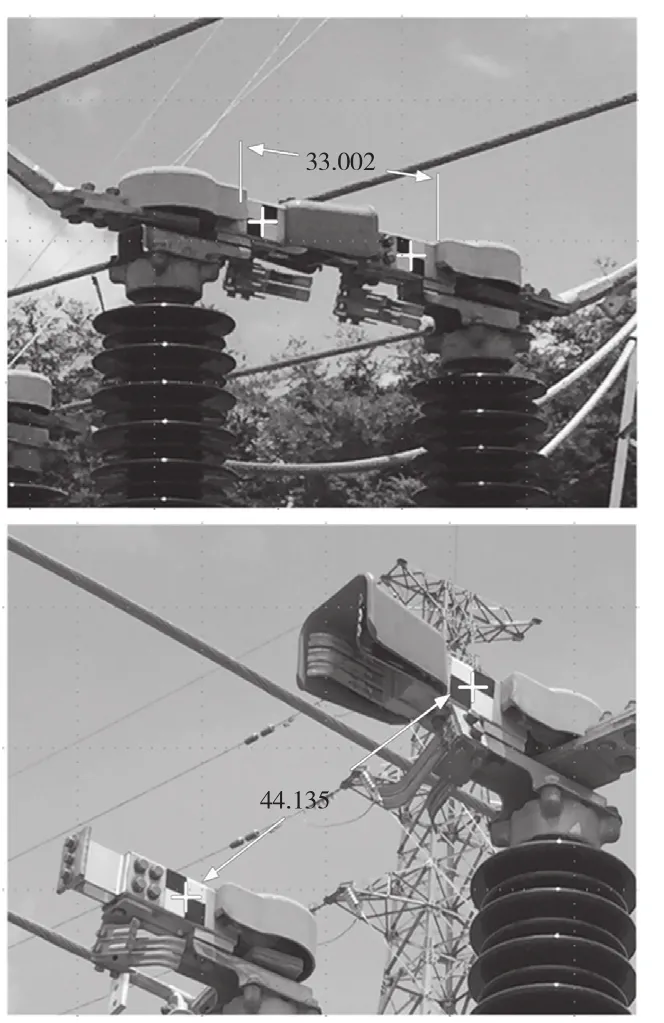
圖2 刀閘靶標位置示意
獲得同名點之間的距離后,判斷點距是否落在刀閘閉合距離區間、刀閘開啟距離區間或不處于開閉任一距離區間,從而獲得一個刀閘開閉狀態或異常狀態信息作為后續狀態投票依據。最終,結合多個點距獲取多個狀態信息后,以狀態投票方式決定得票數最高的狀態為最終輸出狀態,從而辨識隔離開關的合閘狀態是否開合正常。
3 基于雙目視覺的變電站刀閘狀態圖像識別在試點變電站中的應用
3.1 試點變電站基本情況
選取某一35 kV小型敞開式變電站作為試點,采用現場圖像識別作為輔助判據,確保刀閘設備分合到位。該變電站占地面積約3 000 m2,分為主變區域(2臺主變,總容量10 MVA)、35 kV高壓區域(單母線分段接線,終期10個間隔,現有8個間隔,其中2回線路間隔,各間隔地刀、空開均為手動操作)、繼保室區域、10 kV設備室區域以及電容器等其他區域。
3.2 刀閘狀態雙目圖像識別流程
以單組刀閘為例,刀閘狀態雙目識別流程如下。
(1)調度員向調度系統下發倒閘操作指令,待操作指令完成后,調度系統自動向視頻平臺下發刀閘圖像識別任務。
(2)視頻綜合管理平臺自動觸發預設好的與倒閘操作一一對應的刀閘巡視任務。
(3)聯動的攝像機到達對應的預置點,抓拍指定刀閘A、B、C共3組圖片,隨后將抓拍圖片通過網絡發送到智能分析服務器。
(4)智能分析服務器對刀閘狀態進行實時計算、分析,狀態包括開、合、其中一或兩項未動作或無法分析,并將分析結果發送至視頻綜合管理平臺。
①當刀閘三相狀態分析結果同時為“開”狀態,分析結果存儲為“開”;
②當刀閘三相狀態分析結果同時為“關”狀態,分析結果存儲為“關”;
③除了以上兩種情況以外,其他情況的分析結果存儲均為“異常”。
(5)視頻綜合管理平臺根據智能分析服務器的分析結果自動觸發聯動應用,聯動信息發送動環主機,聯動報警輸出。
(6)環境采集單元根據視頻綜合管理平臺分析結果轉換為一一對應的硬接點信號,開(0.1)、合(1,0)以及異常(0,0),并發送到測控裝置。
(7)測控裝置檢測硬接點信號并按規則分類,將分類后結果發送至調度系統作為輔助判據信息存儲。
3.3 刀閘狀態雙目圖像識別運行測試
在變電站初步改造完畢后,以是否能夠有效判別刀閘狀態對變電站進行運行調試,從而實現一鍵式調度。
當刀閘狀態更改時,設備列表將顯示對應項目的A、B、C共3個刀閘的狀態。未進行倒閘操作前,對應項目的A、B、C刀閘狀態均顯示“閉合”。完成倒閘操作后,對應項目的A、B、C隔離開關狀態均顯示“開啟”。
本次完成的倒閘操作驗證了雙目視覺技術在變電站刀閘狀態圖像識別中的實用性。通過雙目視覺技術,結合目標靶標識別,建立坐標分析計算的方法,精確識別測量刀閘動靜觸頭的相對距離,為判斷刀閘開合是否處于要求范圍提供了強有力的判斷依據。相比于單純使用圖像識別技術的相關系統,這樣能夠大幅提高視覺監測系統的可靠性,降低誤判的可能性。
作為視頻監測系統,通過實時圖像傳輸顯示,運維人員可以及時發現刀閘閉合的實際情況,無需到變電站現場就可以實現刀閘的監控與管理。在刀閘發生故障時,系統能夠及時識別、測量并報告狀態,運維人員可通過實時圖像進行人工二次確認,進而提高變電站日常運行管理維護的效率,降低發生事故的概率。
4 結 論
本文研究雙目視覺技術在變電站刀閘狀態圖像識別方面的應用。通過雙目視覺裝置提取變電站內刀閘狀態實時畫面,提取刀閘上靶標三維位置進行計算同組圖像中兩個靶標的點距,并比對系統中刀閘絕對打開和絕對閉合狀態點距,輸出刀閘實時狀態,有效提升了圖像識別的有效性和準確性。選取某變電站作為試點變電站,對該變電站進行定制化改造。通過站內實際測試,證明了此項技術可以實時識別刀閘狀態,進一步提高了圖像識別的準確性,為變電站智能化操作提供了可靠判據,有效推動了變電站的無人化進程。
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
電子制作(2018年8期)2018-06-26 06:43:34
電子制作(2017年8期)2017-06-05 09:36:15
山東工業技術(2016年15期)2016-12-01 05:31:22
現代工業經濟和信息化(2016年5期)2016-05-17 05:35:57
河南電力(2015年5期)2015-06-08 06:01:45
水電站機電技術(2014年1期)2014-09-26 11:59:53
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06
