凸形豎曲線路段識別視距研究
2020-11-12 02:00:54陳卓
天津建設科技 2020年5期
陳 卓
(天津市市政工程設計研究院長沙分院,湖南 長沙 410008)
隨著交通運輸事業的發展,新建高速公路與已建高速公路的對接、已建高速公路新增落地互通的情況屢見不鮮;因此,對新增互通式立體交叉位置與現狀平縱面指標結合的研究就顯得至關重要。JTG/TD 21—2014《公路立體交叉設計細則》對互通式立體交叉范圍內的主線豎曲線最小半徑提出了一般值與極限值的范圍并在附注中對在分流鼻端前識別視距控制路段的凸形豎曲線半徑進行了單獨說明。JTGD 20—2017《公路路線設計規范》中對于各級公路的互通式立體交叉、服務區、停車區、客運汽車停靠站等各類出口路段的識別視距也提出重點、明確的要求。
規范中僅對豎曲線半徑的使用范圍、識別視距要求進行了數據明確,但如何計算、如何針對現狀高速公路的復雜情況進行靈活運用則成為了設計中必需面對和思考的問題之一。
1 規范的相關要求與分析
1.1 行車視距
為了行車安全,駕駛人員應能隨時看到汽車前面相當遠的一段路程,一旦發現前方路面上有障礙物或迎面來車,能及時采取措施,避免相撞,這一必須的最短距離稱為行車視距[1]。
行車視距是否充分,直接關系到行車安全與效率,是道路使用質量的重要指標之一。在道路平面上的暗彎(處于挖方路段的彎道和內側有障礙物的彎道)、縱斷面上的凸形豎曲線以及下穿式立體交叉的凹形豎曲線上都有可能存在視距不足的問題。
根據駕駛員發現障礙物或迎面來車采取措施的不同,行車視距可分為:停車視距、會車視距、錯車視距、超車視距及識別視距。
1.2 識別視距
在JTGD 20—2006《公路路線設計規范》中僅對停車視距、超車視距等做出了相關要求,沒有涉及識別視距;但在2008年編制的《公路路線設計細則》(總校稿)中提出在互通式立交出、入口等行車條件復雜區域內,宜滿足判斷識別視距;但由于總校稿最終沒有頒布,因此識別視距的概念并沒有在設計行業中廣泛傳播。
JTG/TD 21—2014 在表5.5.3 的附注中說明:在分流鼻端前識別視距控制路段,主線凸形豎曲線最小半徑取表中括號內的值。識別視距再次正式出現在現行規范規程中。直到JTGD 20—2017 將識別視距(7.9.5條)作為單獨的一條予以明確,同時額外說明。
1.3 現行規范的取值情況
JTGD 20—2017 特別強調:各級公路的互通式立體交叉、服務區、停車區、客運汽車停靠站等各類出口路段應滿足識別視距要求并應符合相關規定,當受地形、地質等條件限制路段,識別視距可采用1.25 倍的停車視距,同時應進行必要的限速控制和管理措施。見表1。

表1 規范中的識別視距標準
JTGD 20—2017在規定識別視距標準時并沒有給出對豎曲線的要求,而JTG/TD 21—2014 則直接給出了豎曲線最小半徑的一般值與極限值,見表2。

表2 互通范圍內主線豎曲線最小半徑
JTG/TD 21—2014 在對應的條文說明中:考慮到在互通式立體交叉范圍內,由于運行條件復雜且變化頻繁需有比其他路段更大的視距要求,對于分流鼻端前識別視距范圍內的凸形豎曲線最小半徑按識別視距計算確定,識別視距取停車視距的1.25 倍,物高取值為0。
通過對兩個規范的要求及條文說明分析可以得出,當考量互通式立體交叉范圍內的主線指標時,若按JTG/TD 21—2014 中的指標要求設計并不一定能夠滿足識別視距的要求;為保證設計的安全,針對項目的具體情況,應通過具體計算來驗證設計方案。
2 凸形豎曲線路段識別視距的計算
當小客車行駛在公路上時,豎曲線半徑的大小將直接影響駕駛員行駛過程中視線距離;當行駛在直線上時,可以認為主線的豎曲線半徑為無窮大,因此視距也可認為是無窮大,此種情況下不存在識別視距不足的情況;當行駛在凹形豎曲線段時,除夜間行車時前燈照明照射距離有限及通過主線下穿橋梁時存在行車視距的問題外,其余情況下同樣不存在識別視距不足的情況;而對于凸形豎曲線則相對復雜一些,分3種情況。
1)直線配凸形豎曲線段。當互通式立體交叉分流鼻端位于凸形豎曲線上坡的進口附近時,小客車駕駛員在直線段能否看到分流鼻端的位置模型見圖1。

圖1 直線配凸形豎曲線段
通過圖1可以得到平面幾何關系

H取高出路面1.2 m,識別視距的物高取0(路面標線的高度),將H=1.2 m代入后可簡化為

將R、D分別代入式(1)便可對識別視距S是否滿足規范要求作出判斷。反之,通過識別視距也可以反推出合適的凸形豎曲線半徑。
以主線設計速度120 km/h的識別視距為基準,對小客車位于不同距離的凸形豎曲線半徑進行推算,見表3。

表3 豎曲線半徑推算 m
由表2可知,當主線設計速度為120 km/h時,規范要求最小豎曲線半徑一般值為45 000 m,極限值為23 000 m,但通過表3 可以發現:當小客車在直線上的距離>259 m 時,凸形豎曲線半徑小于極限值時仍可滿足識別視距的要求;當小客車在直線上的距離>120 m 時,凸形豎曲線半徑小于一般值時仍可滿足識別視距的要求。
2)凸形豎曲線段。當互通式立體交叉分流鼻端位于凸形豎曲線上時,小客車駕駛員能看到分流鼻端位置的半徑豎曲線模型見圖2。

圖2 完全位于凸形豎曲線段
通過圖2可以得到平面幾何關系

將H=1.2 m代入后可簡化為
通過式(2)可知,不同的豎曲線半徑對應唯一的識別視距長度。根據表1計算出與之對應的豎曲線半徑值。見表4。
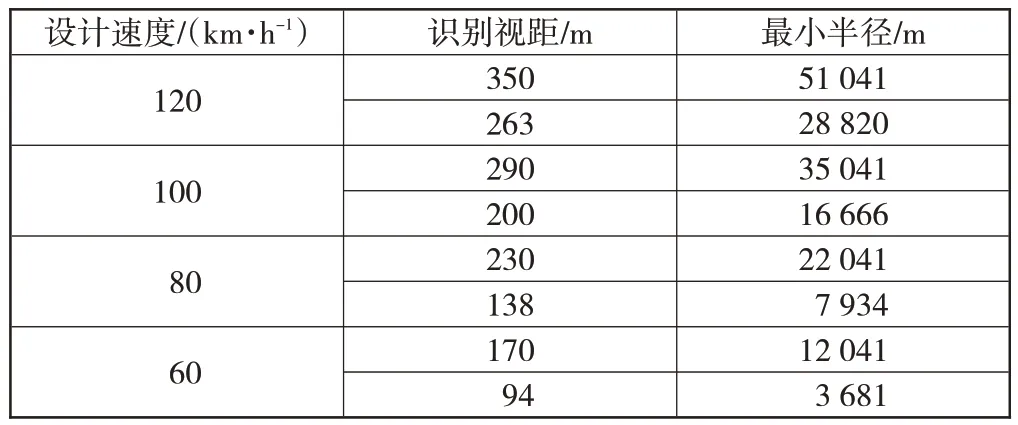
表4 主線豎曲線最小半徑計算值
與表2對應的主線豎曲線最小半徑范圍進行比對可以發現:當采用JTGD 20—2017 表7.9.5 識別視距值進行設計時,凸形豎曲線半徑取值要遠大于JTG/TD 21—2014 表5.5.3 互通式立體交叉范圍內主線豎曲線最小半徑的推薦值。因此,建議具體設計時根據實際情況重新核算為宜。
當采用1.25 倍停車視距作為識別視距進行設計時,凸形豎曲線半徑取值則可按JTG/TD 21—2014 表5.5.3凸形豎曲線的極限值作為設計參考值。
3)凸形豎曲線配直線段。當互通式立體交叉分流鼻端位于凸形豎曲線下坡段的出口附近時,小客車駕駛員在直線段能否看到分流鼻端的位置模型見圖3。

圖3 豎曲線配直線段
通過圖3 可以發現:當分流鼻端出口還在凸形豎曲線上時,適用圖2的計算公式;當分流鼻端出口位于直線上時,則只需滿足h<H的條件即可實現符合規范要求的識別視距。當豎曲線長度時,識別視距即可滿足設計需求。
3 工程實例
湖南省某已建成高速公路,設計速度為120 km/h,由于地方經濟發展需增設一落地互通。
互通起點端分流鼻端位置位于R=17 100(m)的凸形豎曲線范圍內,小于規范規定的極限最小半徑23 000 m,該豎曲線終點樁號為K1603+313.674;互通漸變段起點樁號為K1603+051.105,漸變段長100 m,減速車道長145.014 m,分流鼻端出口樁號為K1603+296.47;互通終點端受一學校控制,學校樁號范圍為K1603+900~K1604+200,互 通 叉 心 樁 號 K1603+652.378,因此互通位置實際可移動的范圍在247.622 m以內。根據現狀情況需對識別視距是否滿足規范要求進行檢驗,此種情況屬于本文所述的凸形豎曲線配直線段情況。
首先計算完全位于凸形豎曲線范圍內時R=17 100(m)的實際視距長度通過將互通整體移位,分流鼻端出口位置調整為K1603+612.608,距離豎曲線終點D=298.934(m),識別視距進入凸形豎曲線范圍L=350-298.934=51.066(m)<202.6 m,滿足JTGD 20—2017中設計速度為120 km/h時識別視距350 m(460 m)的要求。
4 結論
1)對于直線配凸形豎曲線段和凸形豎曲線配直線段的情況,即使凸形豎曲線半徑不滿足規范要求的最小豎曲線半徑,仍可以運用識別視距的有效長度靈活選擇互通分流鼻端出口位置。
2)對于凸形豎曲線段的情況則在采用規范提供的互通式立體交叉范圍內主線豎曲線最小半徑的情況下,仍需對識別視距進行校核,以免造成分流鼻端前識別視距控制路段不滿足規范情況的發生。