一體化海上測風塔浮運拖航性態分析
2020-11-13 01:52:18丁紅巖胡睿奇張浦陽樂叢歡
哈爾濱工程大學學報 2020年8期
關鍵詞:結構
丁紅巖, 胡睿奇, 張浦陽, 樂叢歡
(1. 天津大學 水利工程仿真與安全國家重點實驗室,天津 300072;2. 濱海土木工程結構與安全教育部重點實驗室(天津大學),天津 300072; 3. 天津大學 建筑工程學院,天津 300072)
作為清潔能源之一的風能因其清潔的、可再生的、儲量很大的優勢而具有大規模發展潛力。海上風電場的建設需要對擬建風電場位置處的風資源進行評估,為風電場建設提供客觀依據,是風電場能否取得良好經濟效益,達到預期收益的關鍵,是整個風電場開發建設的重要環節[1-2]。海上測風塔的建立在風電場前期的風資源評估、風場微觀選址、風電場規劃設計等方面提供資料,同時能夠對風電場風況實時監測、超短期預測,對數值預報模式,預報輸出數據比對和數值模式參數進行校正[3-4]。隨著風電技術的發展,風機塔筒高度的提高,需要廣泛的評估風能資源,對測風塔的建造也提出了新的需求。海上測風塔的使用年限較短,高度在100 m左右[5]。典型的基礎結構型式有單樁基礎型式、導管架基礎、鋼制平臺基礎,這些型式均存在安裝設備費用高等問題[6-10]。海上測風塔基礎安裝施工是一項困難、復雜、耗時又費力的工作。研發一種新型海上風電測風塔基礎結構,解決海上施工周期長、造價高、穩定性差等問題,對海上風資源的掌握和開發具有重要意義。
本文提出的可自浮拖航的一體式新型測風塔結構吸收了目前發展比較迅速的吸力筒型基礎型式和海上一步式安裝技術[11-14]。通過數值模擬分析,采用DNV-SESAM[15]程序對四邊形浮筒浮箱組合基礎型式進行了頻域和時域的水動力分析。根據穩性校核結果優化基礎型式和上部塔架高度;建立了拖航水動力模型,分析了拖航要素對結構動態響應的影響規律,并針對一體化的浮運技術進行了完整分析。
1 結構設計與數值模擬
本文以實際工程項目為研究背景,介紹了一種新型式帶有浮筒和浮箱結構的四邊形一體式測風塔結構。四邊形結構上部塔架高度為160 m,其基礎結構采用了吸力式筒裙結構和矩形浮箱的組合型式,上部塔架是四邊形桁架結構。筒裙結構之間通過4個浮箱連接,筒裙結構的下裙板最終插入土體,上裙板可以施加壓載。該結構整體可以自浮拖航,下沉安裝時,結構依靠自重下沉,如果沒有達到要求的下沉深度,可以通過浮箱注水壓載增加自重。浮運過程的穩性,拖航方式以及不同海況下的運動響應是水動力分析的主要內容。
1.1 結構設計
一體式測風塔模型的結構特點為:測風塔塔架、浮箱結構及吸力式筒裙基礎,組合形成的可自浮拖航的結構體系如圖1所示。該結構是基于實際工程設計的,主要應用于水深40 m的海域,上部為高聳四邊形桁架式塔架結構,高度110 m,連接53 m的過渡段。實際安裝完成后過渡段大部分浸沒在水中,拖航時上部塔架總高度為163 m。浮箱組合基礎是由4個位于角點的圓形筒裙結構與4個矩形浮箱依次相連而成的組合結構。浮箱內設有加強肋板以提高浮箱剛度,肋板底部設置了進水孔。4個圓筒形裙板結構與浮箱連接,筒裙分為上下2部分裙板結構,上部裙板內側設置有環向和徑向的肋板,底部裙板為承載結構。
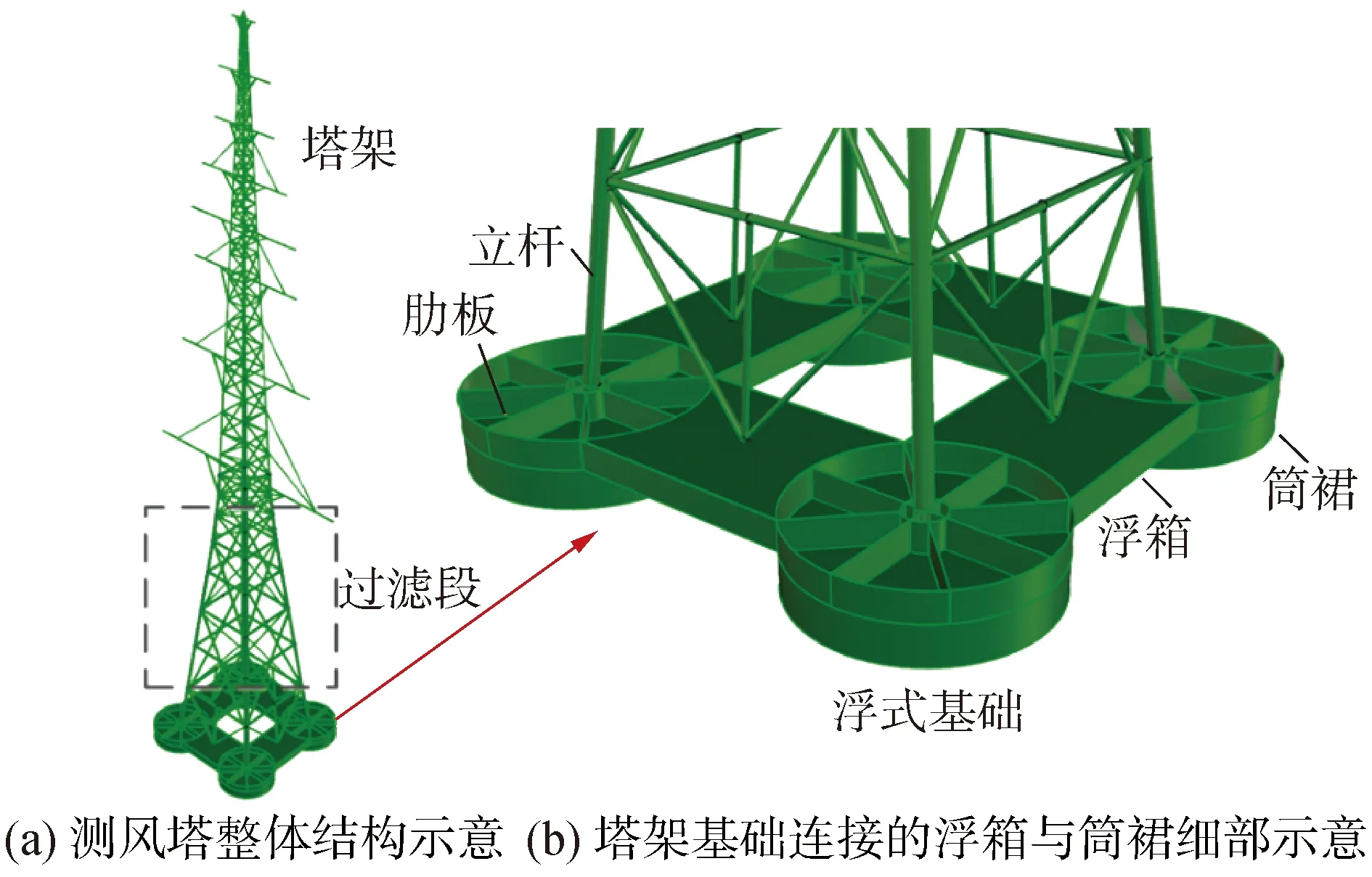
圖1 數值模擬模型Fig.1 Numerical model
根據浮穩性的校核結果判斷底部浮箱和筒裙結構的尺寸、連接方式在滿足提供足夠的回復力矩基礎上,迭代優化得到適合的結構型式。優化時上部塔架結構的跟開是固定的,因此設計時需保證塔架底部8個節點能夠支撐在浮箱或者筒裙頂蓋上。
本文基于163 m高度的上部塔架需要滿足的抗風傾力矩要求,設計了如圖2所示3種基礎型式。針對3種型式,分別校核其初穩性高和面積比。對于測風塔的浮式基礎,結構橫向、縱向尺寸一致,因此橫、縱傾穩性不進行區分。通過穩性校核結果比較3種型式所能提供的回復力矩,選擇出適合163 m塔架高度的基礎結構型式。針對另外2種型式的浮式基礎,在滿足拖航過程中抗傾覆要求的前提下,給出最大可以連接的上部塔架高度的建議范圍。

圖2 基礎型式Fig.2 Foundation models
3種基礎型式設計思路為浮箱結構的型深(1.5~3 m)較一般的浮式結構偏小,因而基礎吃水變化的幅度不大,故在吃水一定時,結構的穩心高與傾角無關,穩心半徑僅與水線面的形狀有關。
1.2 數值計算
本文采用DNV-SESAM對一體式的測風塔結構的水動力特性進行了數值模擬分析。
1.2.1 穩性分析
浮體結構受到風、浪、流荷載等外力作用會發生傾斜,外力消失后,結構能夠回復到原來的平衡位置。該結構具有抗傾覆的能力,此抵抗力稱為復原力,產生的效果稱為復原力矩。計算結構在自浮狀態下的初穩性時,采用DNV SESAM 軟件的HydroD模塊提供的IMO(國際海事組織)設計風譜進行風傾力矩的計算。基于初穩性的分析結果,得到能夠滿足穩性要求的基礎型式(模型3)進一步進行破艙穩性的分析。根據不同船級社中關于一般浮式結構的穩性要求,研究結構完整穩性、破艙穩性。
波浪荷載的頻率跨幅較大,包含了一般浮式結構的自振頻率。因此對于一體式測風塔模型進行了頻域分析,計算了不同浪向角下各個自由度的運動幅值響應算子RAO,從而得出結構在波浪力作用下的運動特性。
1.2.2 拖航分析
采用DNV-SESAM的SIMA模塊對一體式測風塔拖航過程進行了時域分析,采用模塊中單線耦合模擬簡化系纜模型,建立系纜點,根據纜繩的特性輸入相關剛度參數。將HydroD模塊計算的頻域水動力結果,導入SIMA模塊中建立完整的拖航模型,設置環境條件,計算拖航過程的時域響應。時域計算僅考慮一階波浪荷載,波浪、流荷載作用在結構上。影響拖航特性的因素較多,如纜繩長度、系纜點位置以及環境海況。因此針對單一海況條件(波高、周期、浪向角)和聯合海況下的動力響應進行了對比分析。
1.3 邊界條件
1.3.1 穩性校核
本文基于實際工程的水文資料,穩性計算是在8級風作用下的風傾力矩,即20 m/s風速海況下的穩性。鑒于該海域水深為43 m,拖航距離較近,因此沒有按照中國船級社(CCS)《海上拖航指南》[16]規范中的海上浮式結構的拖航要求的沿海航區設計風速30.9 m/s來進行抗傾覆校驗。國際規范中對與穩性校核的要求并不十分一致,其中《海上拖航指南》[16]要求初穩性高不小于0.3 m,面積比不小于1.4,DNV[17]要求初穩性高不小于0.5 m,復力矩與風壓橫傾曲線至第二交點處的兩曲線所包圍的面積比值不小于1.4。
1.3.2 破艙說明
分艙結構不僅可以在下沉過程中提供壓載空間,還能夠用于調節整體平衡。但是艙室如果發生破壞,在拖航過程中進水,此時艙內的自由液面的運動會影響外部結構的穩性,同時偏心自重會增加結構的傾覆概率。假設破艙位置的出現是隨機的,分析破艙對于穩性的具體影響時,考慮分別增加進水艙的數量或者改變進水艙室的位置。本文對比了未破艙(完整)、破一艙、浮筒一半破艙,單個浮筒全破艙,以及2個浮筒各破4艙這5種情況。模型3的分艙形式及編號的示意圖如圖3所示。

圖3 模型3的分艙示意Fig.3 Compartment scheme for model 3
1.3.3 拖航分析工況
影響拖航特性的因素較多,根據外部荷載的特點,分別研究了單一海況下,波高、周期、浪向角等因素下的拖航動力響應,同時針對纜繩長度的不同、拖纜力的大小、系纜點的位置等因素研究其拖航穩性。對單因素的工況設計主要包含以下內容:波高變化:1、2、3 m;浪向角變化:0°、45°、90°、180°;纜繩長度變化:100、150、200 m;系纜點位置Z(結合浮筒高度):水面以下(Z=-1.5 m)、水面處(Z=0 m)、水面以上(Z=1.5 m)。實際的拖航速度一般控制在3~6 kn左右,不同條件對纜繩拉力以及航速的影響情況進行了分析比較。拖航方向和浪向角的定義見圖4。拖航方向與0°浪向角方向同向,稱為順浪拖航,180°浪向角與拖航方向相對,稱為頂浪拖航。
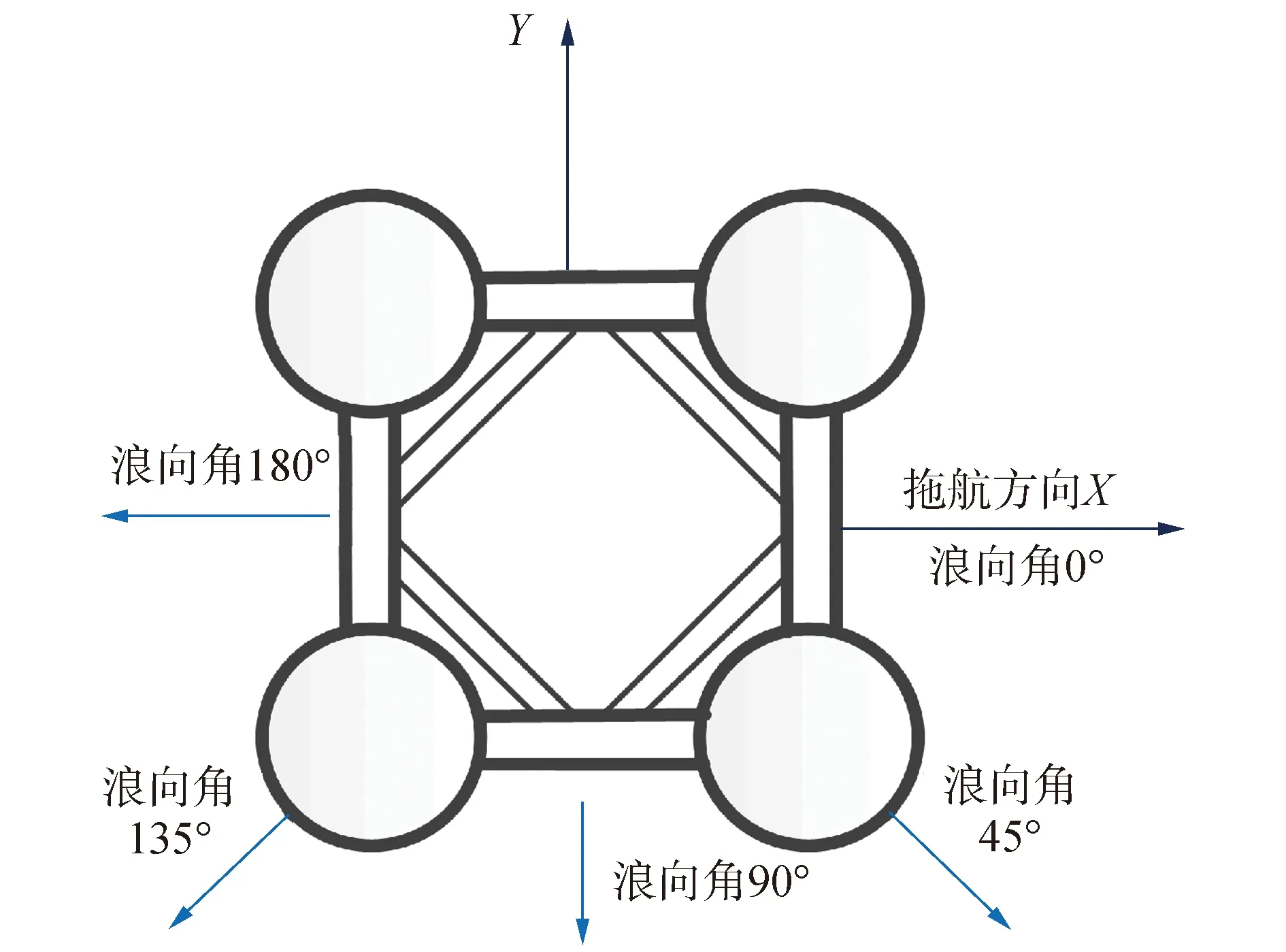
圖4 拖航方向及浪向角示意Fig.4 Sketch of the towing and wave directions
1.3.4 環境荷載
實際中測風塔結構在實際拖航過程中受到風荷載、波浪流荷載的聯合作用,結構的動力響應與單因素海況有很大的不同,更為復雜。針對實際工況,建立了多參數作用下的聯合海況分析,聯合工況的具體統計參數見表1。工作海域水深43 m,波浪的模擬選擇隨機波浪荷載,通過定義JONSWAP波譜參數生成,流荷載通過流速與水深的非線性關系定義。
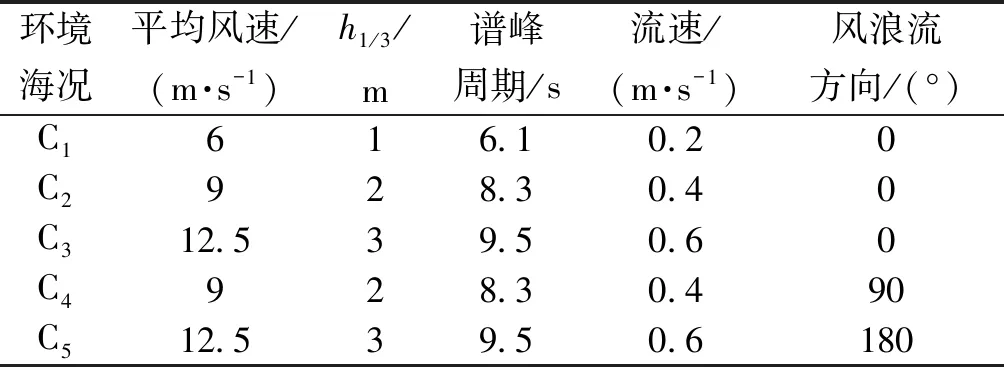
表1 聯合海況參數Table 1 Joint sea states
2 數值模擬結果分析
2.1 穩性分析
2.1.1 完整穩性
針對本文提出的3種基礎結構型式,在自浮不破艙的情況下,計算整體結構的初穩性情況,如表2所示。表中自重僅指基礎結構,不包含塔架部分重量。圖5為模型3的風傾力矩和回復力矩隨傾角的變化情況。
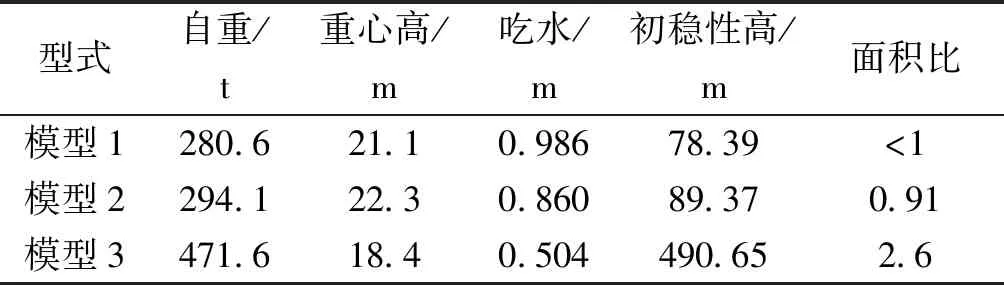
表2 初穩性對比Table 2 Initial stability comparison
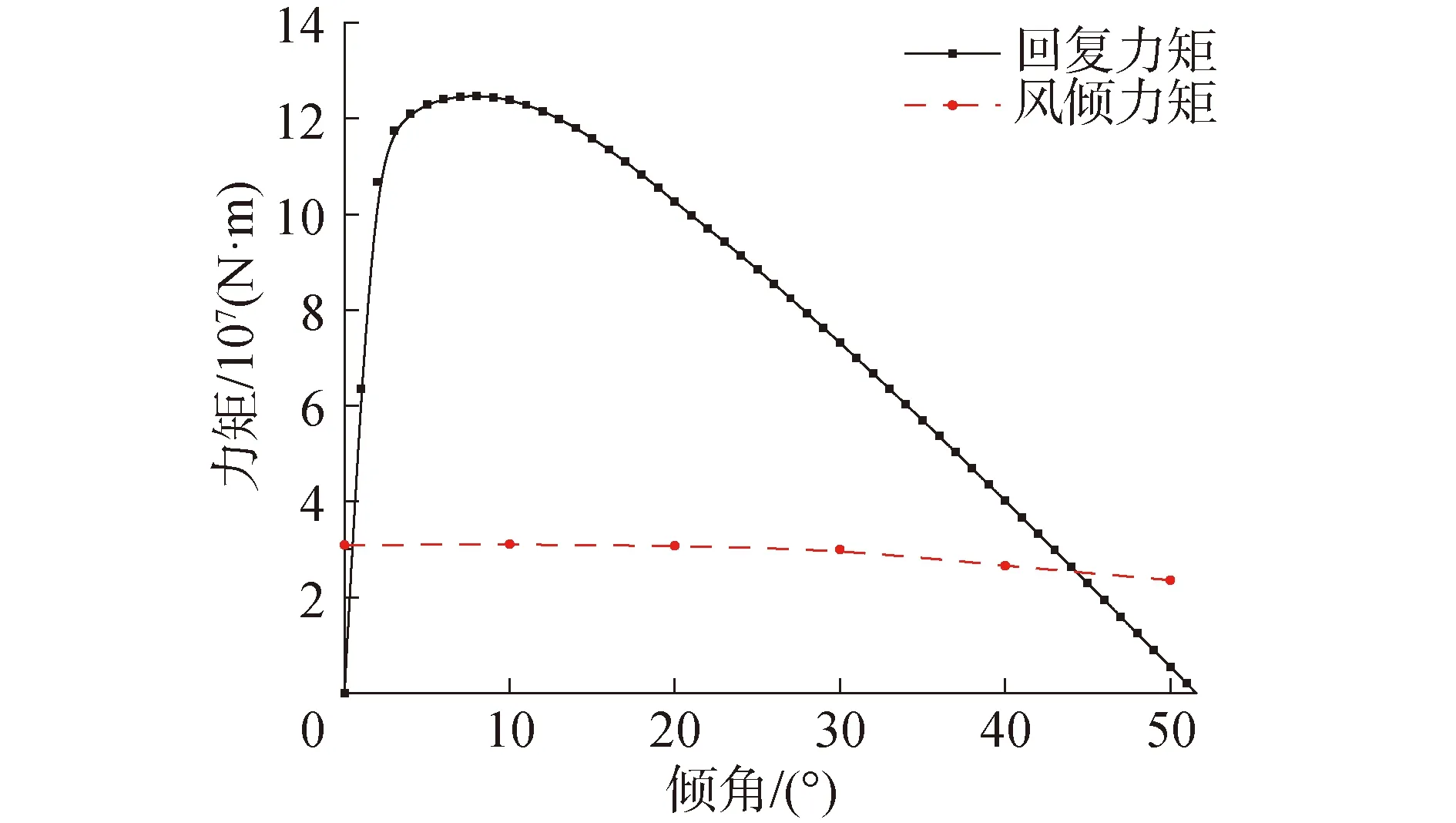
圖5 模型3的風傾力矩和回復力矩曲線Fig.5 Heeling moment and righting moment curves of the model 3
由表2可知,基礎受上部塔架的影響,對于抗傾覆的要求較高,3種型式初穩性高均滿足規范要求,
但只有模型3的面積比大于1.4。復原力矩曲線與風傾力矩曲線的交角在小傾角范圍內的模型2、3均滿足要求,但模型2的面積比小于1,說明在第2交角前結構會失去平衡,即3種型式的浮箱結構只有第3種型式可以提供足夠的回復力矩抵抗163 m高度的塔架結構受到的風傾力矩。
針對模型1、2,改變上部塔架高度,降低風傾力矩的極值。利用IMO提供的風譜,在設計風速為20 m/s條件下,計算穩性,使之滿足規范中穩性的要求。型式1、2分別組合了140、120、100 m高的塔架,其穩性高,吃水,面積比的計算結果見表3,不同塔架高度下的回復力與風傾力矩曲線見圖6。對于型式1,適用于上部塔架高度小于100 m的情況;型式2適用于塔架高度小于120 m的情況。
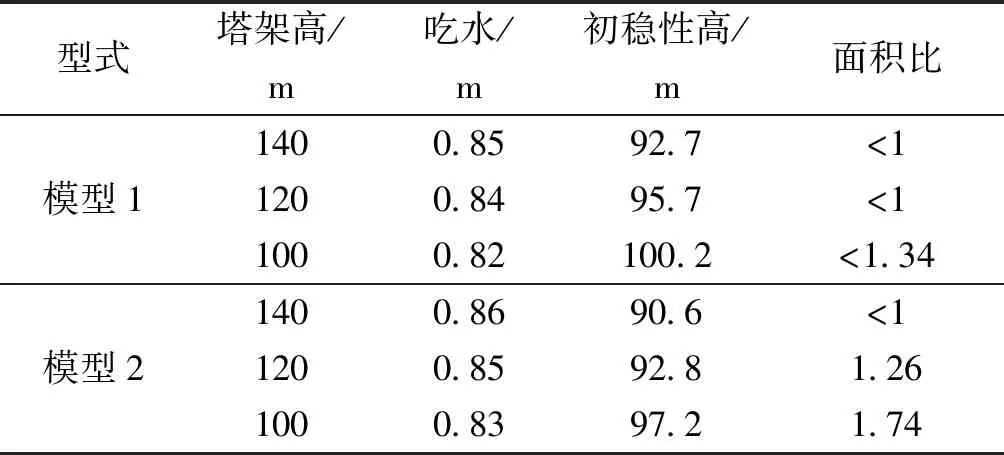
表3 模型1、2穩性分析結果Table 3 Stability analysis results for model 1 and 2
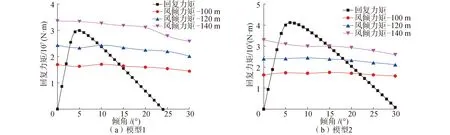
圖6 不同塔架高度下的風傾力矩與回復力矩Fig.6 Heeling moment and righting moment curves under different height of the tower
2.1.2 破艙穩性
表4為模型3在不同破艙狀態下的穩性對比結果。如表4所示,未破艙時穩心高度最高,但面積比不是最大。由于結構設計的分艙較多,少量的破艙反而提高了破艙穩性(面積比)。少量艙室發生破壞進水,增加結構的自重,提高抗傾覆力的大小,雖然有自由液面的影響,但綜合而言,適當的壓載會提高結構的抗傾覆能力。此外穩性也與結構的吃水有關,實際上少量壓載能夠增加結構的吃水,從而一定程度提高了結構的抗傾穩性。
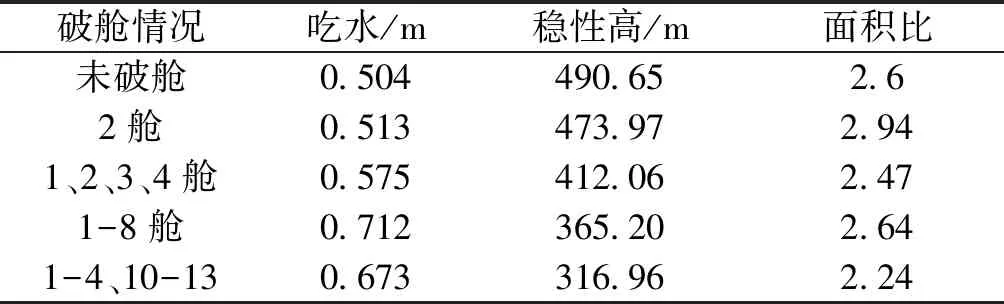
表4 模型3破艙穩性對比對比Table 4 Damaged stability comparison for model 3
對比破艙位置發現,在破艙數量相同時,破艙位置集中出現在單個浮筒上的穩性要好于破艙分別發生在兩個浮筒上的穩性。穩性校核結果說明針對模型3應該進一步進行優化設計,縮小水線面面積,減小浮筒的直徑,減小浮筒間距,以降低成本。實際結構在保證浮箱剛度滿足要求的前提下可以減少分艙數量,單筒分2~4艙即可滿足壓載穩性的要求,也便于下沉過程的調平實施。
2.1.3 運動響應傳遞函數
圖7所示為模型3的幅值響應傳遞函數(response amplitude operator)RAO在縱蕩、垂蕩、縱搖3個自由度上隨不同方向波浪變化的計算結果。
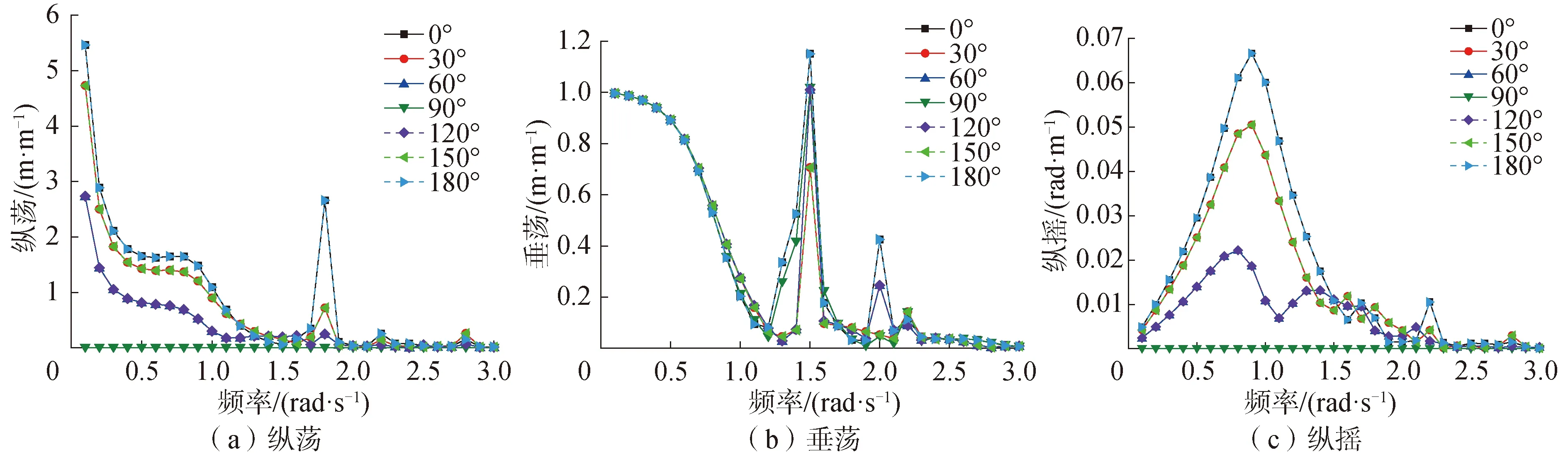
圖7 不同浪向角下的運動響應傳遞函數Fig.7 RAO under different wave directions
可以看出,不同浪向角下測風塔結構運動響應的RAO變化趨勢基本一致。其中縱蕩和縱搖受浪向角的影響較為明顯。縱蕩和垂蕩運動的響應在低頻波浪范圍內幅值較大。在頂浪(浪向角180°)和順浪(浪向角0°)方向上也相較于其他方向上的運動響應最大。考慮到波頻通常在0.25~1.25 rad/s范圍能量最為集中,因此縱蕩、垂蕩和縱搖運動響應均在波浪頻率范圍內較為顯著;不同浪向角對于垂蕩運動的RAO的變化影響較小,當波浪頻率為1.5 rad/s(周期約4.18 s)時,幅值響應最大;縱搖運動峰值對應的波浪頻率在0.9 rad/s(周期約6.8 s),相對于平動響應的周期略長。波浪荷載傳播方向沿結構縱向時(拖航方向),能最大程度的誘導浮體的振蕩運動。
2.2 拖航分析
2.2.1 單因素海況
一體式測風塔結構的浮式基礎的橫向與縱向尺寸一致,雙軸對稱,橫搖與縱搖運動規律一致,因此針對具有回復力矩的縱搖和垂蕩響應變化情況進行對比分析,其他自由度的運動不具有回復力,其運動響應不是共振型的,此處不作分析。分析結果如圖8~11所示。

圖8 波高變化下的運動響應Fig.8 Dynamic responses under different wave height
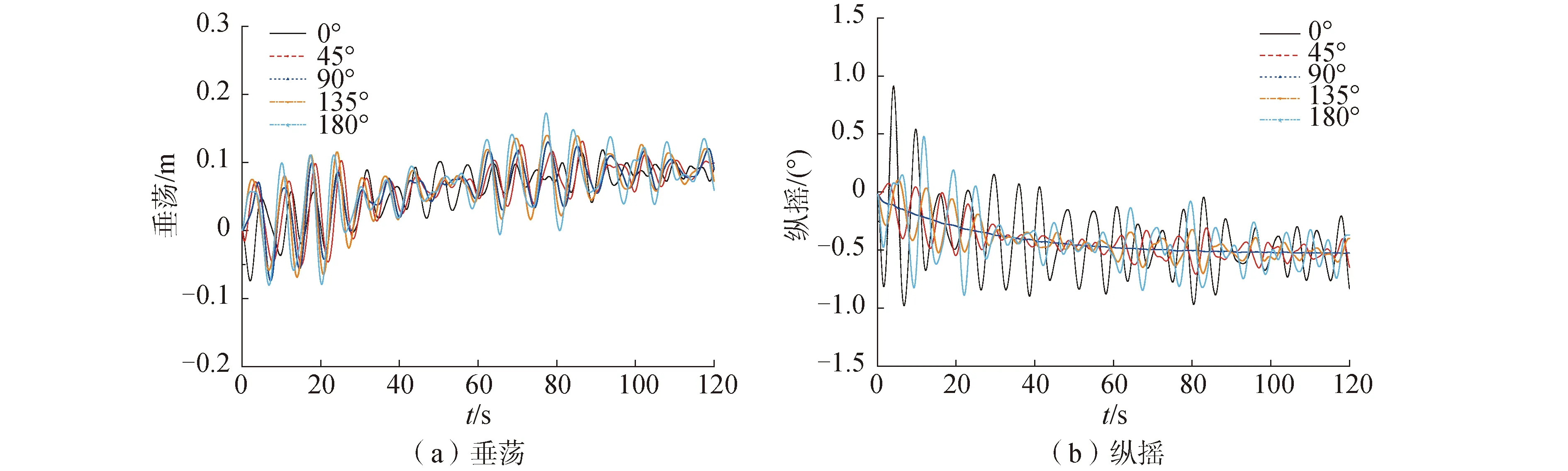
圖9 浪向角變化下的運動響應Fig.9 Dynamic responses under different wave direction
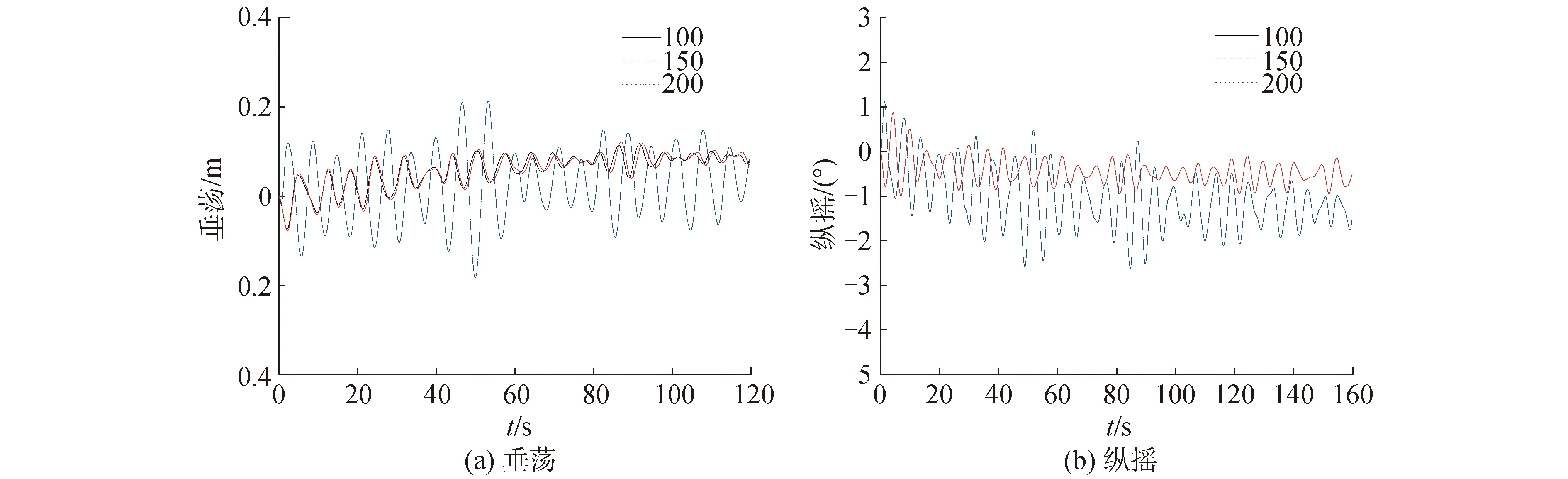
圖10 纜繩長度變化下的運動響應Fig.10 Dynamic responses under different length of the towline

圖11 纜繩位置變化下的運動響應Fig.11 Dynamic responses under different mooring position
圖8~11可以看出,波高對拖航過程的影響十分明顯,波高增加,垂蕩和縱搖運動的幅值和周期均顯著增加。浪向角對垂蕩響應的影響程度明顯小于縱搖,頂浪拖航的垂蕩幅值較大,但其縱搖方向的響應小于順浪拖航。纜繩長度逐漸增加,改變了拖航系統整體的剛度,結構動力響應出現突然變化,長度過長不利于保持拖航穩性,降低系統的耐波性。系纜點的位置受到結構型深和吃水深度的限制對拖航的運動響應影響極小。
2.2.2 聯合海況
聯合海況同時考慮了平均風速、波高以及作用方向對拖航運動的影響情況。一體式測風塔的基礎比一般的海洋浮式平臺尺寸較小,當環境荷載方向垂直于拖航方向時,波高過大會導致無法正常拖航,數值模擬不收斂,因此海況C4調整了該方向的計算波高為2.0 m,即與C2的參數設置一致僅方向垂直,各工況下測風塔結構的動力響應對比結果如圖12所示。

圖12 聯合工況下的運動響應Fig.12 Dynamic responses under joint sea states
圖12表示聯合工況下測風塔結構的拖纜力(系纜力),垂蕩和縱搖運動的變化情況。由于風荷載作用,結構整體的振蕩明顯強于僅考慮波浪荷載的單因素拖航下響應。相同拖纜力作用下,順浪拖航的拖纜力及的運動響應的波動在波高較小時的變化穩定,隨著波高增大,拖纜力及運動幅值顯著增大,在工況C3下,拖纜力的幅值可能會增加至工況C1拖纜力的2~5倍左右。
C3順浪、C5頂浪拖航時垂蕩和縱搖運動的振幅最大,周期較長,其中垂蕩的周期在8 s左右,縱搖的周期在9 s左右。C4的荷載作用方向與橫蕩方向一致,此時運動方向偏離,縱搖運動幅值最小,周期最長約為14 s。相同環境荷載作用下,與順浪拖航對比,頂浪拖航時纜繩的張力較小,縱搖幅值較小,僅垂蕩響應較大。因此綜合考慮,在環境海況比較惡劣時選擇頂浪拖航的方式有利于保持穩性要求,同時應盡量避免出現偏航。
3 結論
1)通過運動響應傳遞函數得到一體式測風塔結構在拖航運輸過程中的縱蕩、垂蕩和縱搖3個自由度上的頻率響應變化規律。縱蕩和垂蕩均在低頻范圍內出現較大的響應幅值,浪向角的影響對縱蕩運動在低頻范圍內差別較明顯,垂蕩整體影響最小,縱搖的影響相對明顯。
2)不同工況下的浮運拖航動力響應分析可知單因素海況中波高影響較大,波高越高,運動響應周期越長,垂蕩、縱搖的幅值越大;浪向角對縱搖運動影響較大,頂浪和順浪的動力響應大于其他浪向角的情況;調節纜繩長度,可以控制拖航穩性。
3)聯合海況作用下順浪拖航的拖纜力和縱搖的響應大于頂浪拖航,垂直于拖航方向的海況作用下,雖運動響應較小,但是橫向偏航十分嚴重,應嚴格避免。環境海況惡劣時建議選擇頂浪拖航的方式,盡量將拖航方向與荷載作用方向保持平行。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50