自主式水下機(jī)器人推進(jìn)器弱故障辨識方法
2020-11-13 01:53:34于大程朱晨光張銘鈞
哈爾濱工程大學(xué)學(xué)報 2020年8期
于大程, 朱晨光, 張銘鈞
(哈爾濱工程大學(xué) 機(jī)電工程學(xué)院,黑龍江 哈爾濱150000)
水下機(jī)器人是目前唯一可以在深海工作的裝備,在海洋開發(fā)中發(fā)揮著重要的作用[1]。自主式水下機(jī)器人(autonomous underwater vehicle,AUV)無人無纜工作在復(fù)雜的海洋環(huán)境中,其安全性是AUV研究和應(yīng)用的重要問題之一,故障診斷是保障其安全性的關(guān)鍵技術(shù)[2]。推進(jìn)器是AUV中負(fù)荷最重、使用頻率最高的部件,是影響AUV安全性的重要部件[2]。因此,研究推進(jìn)器故障診斷技術(shù)對提高AUV安全性具有重要研究意義和實用價值[3]。AUV推進(jìn)器故障診斷技術(shù)研究受到很多學(xué)者關(guān)注,但大多研究推進(jìn)器出力損失較大的故障[4]。推進(jìn)器出力損失較小的弱故障(出力損失小于10%)多為早期故障,研究推進(jìn)器弱故障診斷技術(shù)可避免更大事故的發(fā)生。推進(jìn)器故障診斷技術(shù)流程主要包括故障特征提取和故障程度辨識2部分[5-6],其中弱故障辨識的典型方法有灰色關(guān)聯(lián)分析(grey correlation analysis,GCA)[7]、隱半馬爾可夫模型[8]、支持向量域描述[9]等。灰色關(guān)聯(lián)分析方法是AUV推進(jìn)器故障程度辨識比較典型方法[10]。
本文基于文獻(xiàn)[10],重點研究推進(jìn)器弱故障的程度辨識問題。本文基于該方法進(jìn)行AUV推進(jìn)器弱故障的程度辨識時發(fā)現(xiàn),該方法存在:1)不側(cè)重分析不同的故障信號間的變化差異;2)計算關(guān)聯(lián)度時未考慮不同故障信號間的差異性;3)對AUV故障信號關(guān)聯(lián)度處理不當(dāng)?shù)葐栴}。這些問題導(dǎo)致故障程度辨識誤差較大。本文分析了產(chǎn)生問題的原因,根據(jù)灰色關(guān)聯(lián)理論,提出了改進(jìn)方法,通過AUV實驗樣機(jī)水池實驗,驗證本文改進(jìn)方法有效性。
1 推進(jìn)器弱故障辨識時存在的問題
GCA方法是AUV推進(jìn)器故障辨識比較典型的方法[10-11],本文基于該方法進(jìn)行推進(jìn)器故障辨識時發(fā)現(xiàn),推進(jìn)器故障程度較大時,該方法效果較好,但對故障程度較小的弱故障,該方法存在辨識精度較低的問題。本文基于GCA方法,得到AUV實驗樣機(jī)某待辨識信號(實際故障程度為理論出力的92%)和實際故障程度為理論出力的70%、80%、90%、100%這些參考信號的關(guān)聯(lián)度。待辨識信號與70%、80%、90%、100%參考信號的關(guān)聯(lián)度分別0.703 7、0.765 7、0.841 4、0.802 1。
根據(jù)文獻(xiàn)[10-12],待辨識信號的故障程度為:
(1)
式中:‖R‖0和‖R‖1為2個最高的關(guān)聯(lián)度,y0和y1為這2個參考信號Y0和Y1的故障程度。
根據(jù)上述關(guān)聯(lián)度結(jié)果以及故障辨識結(jié)果,分析基于灰色關(guān)聯(lián)分析方法進(jìn)行推進(jìn)器弱故障辨識時存在的問題為:
1)各不同信號間的關(guān)聯(lián)度差異較小。
出力90%、92%的故障信號間關(guān)聯(lián)度結(jié)果0.841 4和出力100%、92%的故障信號間關(guān)聯(lián)度結(jié)果0.802 1相差不大,根據(jù)灰色關(guān)聯(lián)理論[9],這種關(guān)聯(lián)度結(jié)果間差異較小的情況,是不利于出力90%~100%故障信號的弱故障診斷的。
GCA方法不關(guān)注不同故障信號間的差異,直接進(jìn)行歸一化處理,導(dǎo)致故障特征矩陣中變動量較小的特征量在故障程度辨識中所占比重被淡化。
2)各信號的關(guān)聯(lián)度計算結(jié)果偏低。
出力92%故障的待辨識信號和出力90%的故障信號關(guān)聯(lián)度為0.841 4。理論上,由于90%和92%的故障程度比較接近,出力90%、92%的故障信號間差別應(yīng)該很小,然關(guān)聯(lián)度的計算結(jié)果0.841 4比預(yù)期值小,這說明對于本文的弱故障信號,該關(guān)聯(lián)度計算方法還有可改進(jìn)之處。
不同類型的故障特征向量之間的相關(guān)性不強,關(guān)聯(lián)系數(shù)對辨識結(jié)果沒有參考價值。因此,計算關(guān)聯(lián)度時,不同類型故障特征向量間的關(guān)聯(lián)系數(shù)會導(dǎo)致不同故障程度的待辨識信號和參考信號的關(guān)聯(lián)度計算結(jié)果偏低。
3)處理關(guān)聯(lián)度的方法不合理。
從上面得到的故障辨識結(jié)果94.88%來看,這種傳統(tǒng)灰色關(guān)聯(lián)理論中加權(quán)平均處理關(guān)聯(lián)度的方法對弱故障程度的辨識精度有限(誤差為2.88%)。這表明這種處理關(guān)聯(lián)度的方法不準(zhǔn)確,應(yīng)根據(jù)信號關(guān)聯(lián)度和故障程度間存在的關(guān)聯(lián)規(guī)律尋找更為合適的關(guān)聯(lián)度處理方法。
AUV故障信號作為統(tǒng)計量具有正態(tài)分布統(tǒng)計特點,而GCA方法將關(guān)聯(lián)度進(jìn)行加權(quán)平均計算,與故障信號特點不相符,導(dǎo)致辨識誤差較大。
2 關(guān)聯(lián)度計算
針對灰色關(guān)聯(lián)分析方法各不同信號間的關(guān)聯(lián)度差異較小的問題以及在計算信號間關(guān)聯(lián)度時未考慮不同故障信號間的差異性問題,本文對關(guān)聯(lián)度計算方法進(jìn)行改進(jìn)。
2.1 故障特征增強
針對GCA方法不同信號間的關(guān)聯(lián)度差異較小的問題,本文提出一種基于特征值相對變化量的歸一化計算方法。在灰色關(guān)聯(lián)分析中,以信號相對特征值代替絕對特征值的故障特征矩陣相對轉(zhuǎn)化方法。
2.1.1 問題分析
針對灰色關(guān)聯(lián)分析方法各不同信號間的關(guān)聯(lián)度差異較小的問題,本文基于灰色關(guān)聯(lián)理論[10]分析認(rèn)為,灰色關(guān)聯(lián)分析理論降低了變動范圍較小的特征量在故障程度辨識中所占的比重,進(jìn)而導(dǎo)致各不同參考信號和待辨識信號的關(guān)聯(lián)度差異較小。
通過本文作者研究的實驗數(shù)據(jù),驗證上述原因分析是否正確。AUV各故障程度下速度信號部分特征值如圖1所示。
分析圖1,故障程度從出力100%故障增加到出力70%故障過程中,信號的各不同特征量變化量差異較大。如KR的最大值為3.950 6,最小值為2.701 1,變化量ΔEKR=1.249 5;波動偏差STD的最大值為4.763 6,最小值為1.865 9,變化量ΔESTD=2.897 7;局部極大能量熵EOLM的最大值為8.658 7,最小值為1.643 2,變化量ΔEEOLM=7.015 5。ΔESTD是ΔEKR的2.32倍,ΔEEOLM是ΔEKR的5.61倍。通過數(shù)據(jù)分析可以看出,各不同特征量間存在變化量差異較大這一現(xiàn)象。

圖1 AUV各故障程度下速度信號部分特征值變化規(guī)律Fig.1 The change law of partial fault feature value of speed signal
本文進(jìn)一步分析發(fā)現(xiàn),GCA方法直接根據(jù)故障特征量計算向量關(guān)聯(lián)度,因為ΔEEOLM最大,ΔEKR相對較小,則ΔEEOLM對關(guān)聯(lián)度的計算結(jié)果影響最大,而ΔEKR的影響則相對較小。所以KR在最終辨識結(jié)果中所占的比重被淡化,進(jìn)而導(dǎo)致計算出的各不同信號間的關(guān)聯(lián)度差異較小問題。
基于上述分析,為了合理放大類似KR這種變動范圍較小的特征量的變化規(guī)律,本文提出一種基于特征值相對變化量的歸一化計算方法,以解決GCA方法中各不同信號間的關(guān)聯(lián)度差異較小的問題。
2.1.2 計算方法
針對GCA方法各不同信號間的關(guān)聯(lián)度差異較小問題,本文提出一種特征值相對變化量的歸一化計算方法。
本文改進(jìn)方法的主要思路是:由于灰色關(guān)聯(lián)分析中所用的特征值變化范圍差異較大,故本文從消除各特征值間的這種變化范圍差異出發(fā),以一種歸一化的處理方式將所有特征值不同的變化范圍轉(zhuǎn)化為相同的變化范圍。從而實現(xiàn)合理放大變動范圍較小的特征量(如KR)的變化規(guī)律的目的。
本文方法與灰色關(guān)聯(lián)分析方法的不同之處在于:灰色關(guān)聯(lián)分析方法直接由提取的信號特征值計算特征向量間的關(guān)聯(lián)度;本文方法用相對特征值代替絕對特征值,放大變動范圍較小的特征量的變化范圍,統(tǒng)一所有故障特征的變化范圍,然后對相對特征值進(jìn)行關(guān)聯(lián)度計算。
根據(jù)本文參考信號的故障程度變化范圍,將每項特征量的最大值和最小值作為各自的上下限,對范圍內(nèi)的所有特征量進(jìn)行相對轉(zhuǎn)化。
本文以特征值峰度系數(shù)KR為例,闡述這種由信號特征量得到相對特征量的定義式,其他特征量計算方式同理故不再贅述。
(2)
式中:KR0為未發(fā)生故障的信號的峰度系數(shù);KR1為出力70%故障信號的峰度系數(shù);KRx為出力x故障信號的峰度系數(shù)。
2.1.3 結(jié)果對比
本文基于特征值相對變化量的歸一化計算方法,將GCA方法得到的AUV各故障程度下速度信號部分特征值(圖1),通過式(2)轉(zhuǎn)換,得到本文方法在AUV各故障程度下速度信號部分相對特征值變化規(guī)律如圖2所示。
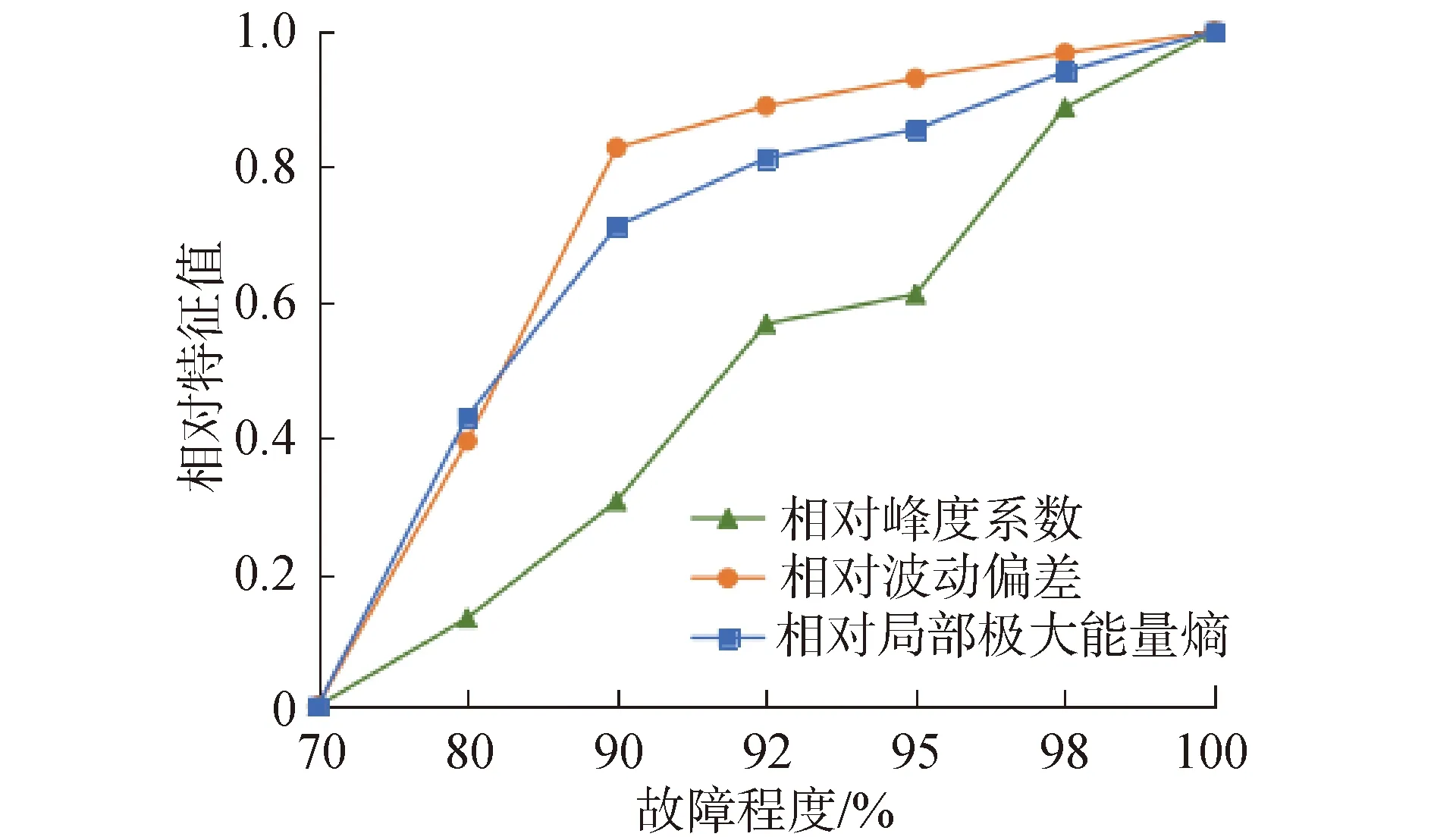
圖2 AUV各故障程度下速度信號部分相對特征值變化規(guī)律Fig.2 The change law of partial relative fault feature value of speed signal
由圖2可看出,所有特征值的變化范圍都是(0,1),而且相對特征值能夠反映出所有特征值的變化規(guī)律。以變化范圍最大的特征值ΔEEOLM為基準(zhǔn),ΔESTD相對增大了232%,ΔEKR相對增大了561%。這說明本文所提相對特征量計算方法具有合理放大變動范圍較小的特征量(如KR)的變化規(guī)律。
為了進(jìn)一步驗證采用相對特征值對各個特征量變化規(guī)律的增強效果,將本文方法得到的圖2中的特征值的相對轉(zhuǎn)化結(jié)果和GCA方法得到的圖1中的原始特征值進(jìn)行對比。
相對特征值能較好地反映出所有特征量的變化規(guī)律。例如,變動范圍較小的特征量KR和變動范圍較大的特征量EOLM轉(zhuǎn)化為相對特征值之后,變化范圍都變成(0,1);KR的變化規(guī)律有了大幅增強,EOLM的變化規(guī)律也有小幅增強。這證明了本文所提相對特征量計算方法,在各信號特征量的歸一化處理中,對變動范圍較小的特征量的變化規(guī)律具有較好的增強效果。實驗結(jié)果驗證了本文方法的有效性。
2.2 關(guān)聯(lián)度計算
針對GCA方法在計算信號間關(guān)聯(lián)度時未考慮不同故障信號間的差異性問題,本文提出一種基于信號類型分類計算參考信號和待辨識故障信號的關(guān)聯(lián)度方法,以增強故障信號間的關(guān)聯(lián)效果。
2.2.1 問題分析
傳統(tǒng)的GCA方法計算關(guān)聯(lián)度時未考慮不同類型的故障信號之間的差異性,導(dǎo)致不同故障程度的參考信號和待辨識信號的關(guān)聯(lián)度計算結(jié)果偏低,本小節(jié)對此問題進(jìn)行原因分析。
已知故障程度的信號組成的參考故障特征矩陣Y和未知故障程度的信號組成的待辨識故障特征矩陣X為[11]:
(3)
傳統(tǒng)的GCA方法計算所有的xi(i)和yj(i)間的向量關(guān)聯(lián)度,然后將所有的向量關(guān)聯(lián)度的平均數(shù)作為參考信號X和待辨識信號Y的整體關(guān)聯(lián)度,具體計算見文獻(xiàn)[10-12]。
本文分析GCA方法計算關(guān)聯(lián)度時存在問題的原因:X和Y分別表示參考信號和待辨識信號,二者分別表示2種不同故障程度的信號的特征矩陣;xi(i)和yj(i)二者分別表示2種故障程度下的故障矩陣中的不同類型的故障特征向量,其中下角標(biāo)i和j表示信號類型。當(dāng)信號故障程度發(fā)生改變時,不同類型信號的同一個特征量的變化規(guī)律是不同的。但是傳統(tǒng)的GCA方法計算的是X和Y2個特征矩陣的整體關(guān)聯(lián)度,并未考慮到xi(i)和yj(i)2種信號的類型差異。即使故障程度相同,但由于xi(i)和yj(i)2種信號的類型不一樣,也會導(dǎo)致這2種信號相關(guān)性較低,并且在實驗研究中發(fā)現(xiàn),相比于這2種信號由于自身類型差異所產(chǎn)生的較低關(guān)聯(lián)度結(jié)果,不同程度故障對這兩者的關(guān)聯(lián)度計算結(jié)果的影響較小。因此,在利用GCA計算關(guān)聯(lián)度之前需要考慮到信號自身的類型差異,否則無法直接說明是由于不同程度故障引發(fā)的信號間關(guān)聯(lián)度低,也就是在進(jìn)行故障程度辨識時,需基于同類型信號(xi(i)和yi(i))間的關(guān)聯(lián)度結(jié)果。
2.2.2 計算方法
針對GCA方法計算關(guān)聯(lián)度時未考慮不同類型的故障信號之間的差異性問題,根據(jù)2.2.1節(jié)的分析,本文提出一種基于信號類型分類計算參考信號和待辨識故障信號的關(guān)聯(lián)度方法。
本文方法的基本思路為:xi和yi是不同故障程度下的同一類型的故障特征信號,它們雖然互相獨立,但是2個信號之間具有相似性。本文根據(jù)xi和yi之間的關(guān)聯(lián)度rii進(jìn)行故障辨識。
本文方法與GCA方法的不同之處:與傳統(tǒng)GCA方法在計算參考信號和待辨識信號的整體關(guān)聯(lián)度時,先計算任意2個故障特征向量間的關(guān)聯(lián)度,然后根據(jù)所有的關(guān)聯(lián)度計算參考信號和待辨識信號的整體關(guān)聯(lián)度的技術(shù)路線不同,本文方法先按照信號的類型對各故障信號分類,然后只計算同類型特征向量間的關(guān)聯(lián)度,再據(jù)此計算參考信號和待辨識信號的整體關(guān)聯(lián)度。

R=[r11,r22,…,rii]
(4)
式中rii表示xi和yi之間的關(guān)聯(lián)度。
然后根據(jù)這個按信號類型分類計算特征向量關(guān)聯(lián)度得到的一維向量R,計算一維向量R中各元素的平均值,該平均值就是最終得到的關(guān)聯(lián)度結(jié)果。
2.2.3 結(jié)果對比
為了驗證本文基于故障信號類型進(jìn)行分類關(guān)聯(lián)計算故障特征向量關(guān)聯(lián)度方法的效果,分別采用本文方法和GCA方法計算實驗平臺AUV運行過程的各故障信號的關(guān)聯(lián)度,并將結(jié)果進(jìn)行對比。
根據(jù)本文改進(jìn)的GCA方法和傳統(tǒng)GCA方法所獲得的最終關(guān)聯(lián)度結(jié)果如表1所示,其中,‖Rx‖i,j是本文改進(jìn)GCA方法的結(jié)果;‖R0‖i,j是傳統(tǒng)GCA方法的結(jié)果。
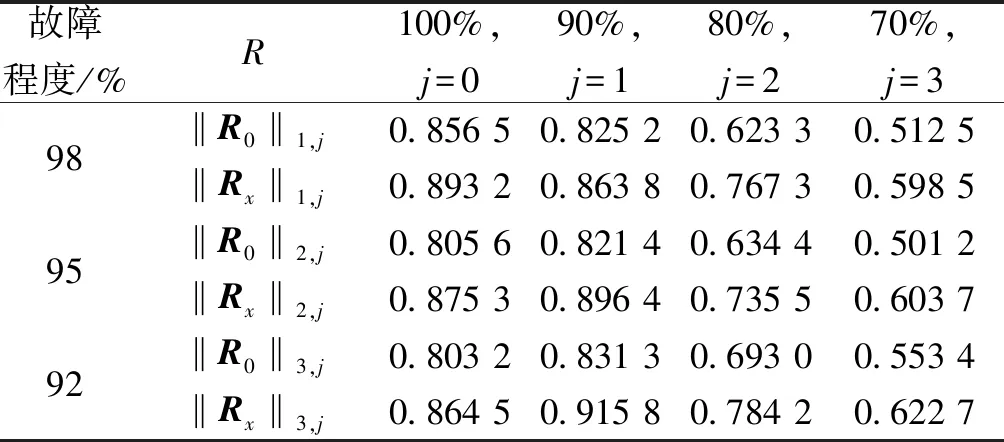
表1 本文方法及傳統(tǒng)GCA方法的關(guān)聯(lián)度結(jié)果
分析表1,對于任意的i∈(1,2,3),j∈(1,2,3),都有‖Rx‖i,j>‖R0‖i,j成立。在推進(jìn)器出現(xiàn)98%故障時,基于本文方法,該故障與100%故障情況的關(guān)聯(lián)度最大,為0.893 2,相比于傳統(tǒng)方法所得的關(guān)聯(lián)度結(jié)果0.856 5而言,本文方法所得的關(guān)聯(lián)度提高了4.3%。在推進(jìn)器出現(xiàn)95%故障時,基于本文方法,該故障與90%故障情況的關(guān)聯(lián)度最大,為0.896 4,相比于傳統(tǒng)方法所得的關(guān)聯(lián)度結(jié)果0.821 4,本文方法所得的關(guān)聯(lián)度提高了9.1%。在推進(jìn)器出現(xiàn)92%故障時,基于本文方法,該故障與90%故障情況的關(guān)聯(lián)度最大,為0.915 8,相比于傳統(tǒng)方法所得的關(guān)聯(lián)度結(jié)果0.831 3,本文方法所得的關(guān)聯(lián)度提高了10.2%。綜上,實驗結(jié)果驗證了本文方法的有效性。
3 故障程度辨識
GCA方法的辨識結(jié)果與實際故障程度仍有一定的偏差。為了增加對AUV未知故障信號故障程度辨識的準(zhǔn)確性,本文根據(jù)AUV故障信號的特點,提出一種基于正態(tài)分布模型的故障程度辨識方法。
3.1 問題分析
前文已說明,GCA方法在得到參考信號和待辨識故障信號的關(guān)聯(lián)度后,按照關(guān)聯(lián)度的大小對參考信號的故障程度進(jìn)行加權(quán)平均處理,從而得到信號的故障辨識結(jié)果,但往往會導(dǎo)致辨識誤差較大。本文在計算故障特征值時,將AUV的各故障信號視為有限時間內(nèi)的統(tǒng)計量,因此,這些故障特征值應(yīng)該符合一定的統(tǒng)計學(xué)規(guī)律。經(jīng)過研究發(fā)現(xiàn)AUV故障信號的正態(tài)分布統(tǒng)計特點。受樣本大小限制,無法對所有推進(jìn)器故障建立數(shù)據(jù)庫,本文是故障程度每隔10%建立一個參考信號,在對未在數(shù)據(jù)庫中的推進(jìn)器故障進(jìn)行辨識時,根據(jù)常規(guī)的GCA所辨識的結(jié)果只能落在樣本數(shù)據(jù)庫的關(guān)聯(lián)度最大的參考信號中,也就會存在一個辨識誤差,雖然通過加權(quán)平均處理能有所改善,但它忽略了作為統(tǒng)計量的AUV故障信號的正態(tài)分布統(tǒng)計特點,進(jìn)而導(dǎo)致辨識誤差仍較大。
基于上述分析,AUV的狀態(tài)量和控制量在一段時間內(nèi)的統(tǒng)計值都應(yīng)該滿足統(tǒng)計學(xué)上的正態(tài)分布規(guī)律:各類信號統(tǒng)計值都在該類信號的期望值處集中分布,越遠(yuǎn)離期望值,信號點越少[13]。針對GCA辨識出故障程度和信號的實際故障程度仍有一定的偏差的問題,本文提出一種基于正態(tài)分布處理關(guān)聯(lián)度結(jié)果的方法。
3.2 計算方法
針對GCA方法處理關(guān)聯(lián)度時存在辨識出故障程度和信號的實際故障程度仍有一定的偏差的問題,根據(jù)3.1節(jié)的分析,本文提出一種基于正態(tài)分布處理關(guān)聯(lián)度結(jié)果的方法。本文根據(jù)AUV故障信號的正態(tài)分布規(guī)律,即各類信號統(tǒng)計值都在該類信號的期望值處集中分布,越遠(yuǎn)離期望值,信號點越少[13],研究推進(jìn)器故障辨識問題。
與傳統(tǒng)GCA方法按照關(guān)聯(lián)度的大小對參考信號的故障程度進(jìn)行加權(quán)平均處理,從而得到待辨識信號的故障程度的技術(shù)路線不同,本文方法基于正態(tài)分布模型表達(dá)不同故障程度信號的關(guān)聯(lián)度分布,從而根據(jù)參考信號的關(guān)聯(lián)度正態(tài)分布模型計算待辨識信號的故障程度。
本文以出力90%故障信號特征值分布為例詳細(xì)闡述本文方法的具體實現(xiàn)過程。
1)繪制出力90%故障的信號特征值的正態(tài)分布。
根據(jù)正態(tài)分布一般圖像[14]以及在出力90%故障下信號有一個穩(wěn)定的集中“期望值”的特點,繪制出力90%故障信號特征值分布,如圖3所示。在圖3中,理論上出力90%故障信號的特征值的統(tǒng)計結(jié)果應(yīng)該位于“期望值”處。如果實際統(tǒng)計的特征值離期望值越遠(yuǎn),說明該信號的實際故障程度離出力90%這一數(shù)值越遠(yuǎn)。

圖3 出力90%故障的信號特征值的正態(tài)分布Fig.3 Normal distribution of 90% failure output
2)基于關(guān)聯(lián)度大小得到與故障辨識相關(guān)的距離。
將圖4中的信號特征值變換為信號與出力90%故障信號之間的關(guān)聯(lián)度,則圖4就變?yōu)槌隽?0%故障信號的關(guān)聯(lián)度分布曲線,利用信號關(guān)聯(lián)度的數(shù)值大小,獲得待辨識信號與參考信號的故障程度之間的距離。理論上2個出力90%故障信號間的關(guān)聯(lián)度為100%,如果待辨識信號和出力90%故障信號關(guān)聯(lián)度越大,就表明該信號的故障程度為出力90%故障的可能性越大,即該信號與出力90%故障信號的故障程度之間的距離越小。假設(shè)現(xiàn)在有一待辨識信號,與出力90%故障信號間關(guān)聯(lián)度為‖R‖1,如圖3中標(biāo)識的那樣,該信號的關(guān)聯(lián)度和出力90%故障信號關(guān)聯(lián)分布曲線有2個交點,意味著該信號的實際出力故障程度有2個不確定量,可能是出力x90∈(90%,100%),也可能是出力x80∈(80%,90%)。
3)根據(jù)與另一個參考信號的相關(guān)度確定故障辨識結(jié)果的區(qū)間。
為了確定未知故障程度信號是大于90%還是小于90%,即故障程度是落在90%的左邊還是右邊,需引入另一個已知故障程度的參考信號,根據(jù)未知故障程度信號與引入的參考信號的距離,判斷位置信號的故障程度范圍。參考本文最初設(shè)置的參考信號的故障程度分別為出力70%、80%、90%、100%,當(dāng)一個待辨識信號作為比較信號分別和這4個參考信號進(jìn)行灰色關(guān)聯(lián)分析后,可得到關(guān)聯(lián)度最高的2個參考信號。例如,以出力100%和90%故障信號為例進(jìn)行說明:如果待辨識信號與出力100%和90%的故障信號之間的關(guān)聯(lián)度為最大值和次大值,則可以確定待辨識信號的故障程度就位于100%和90%這2個參考信號的故障程度之間,具體如圖4所示。
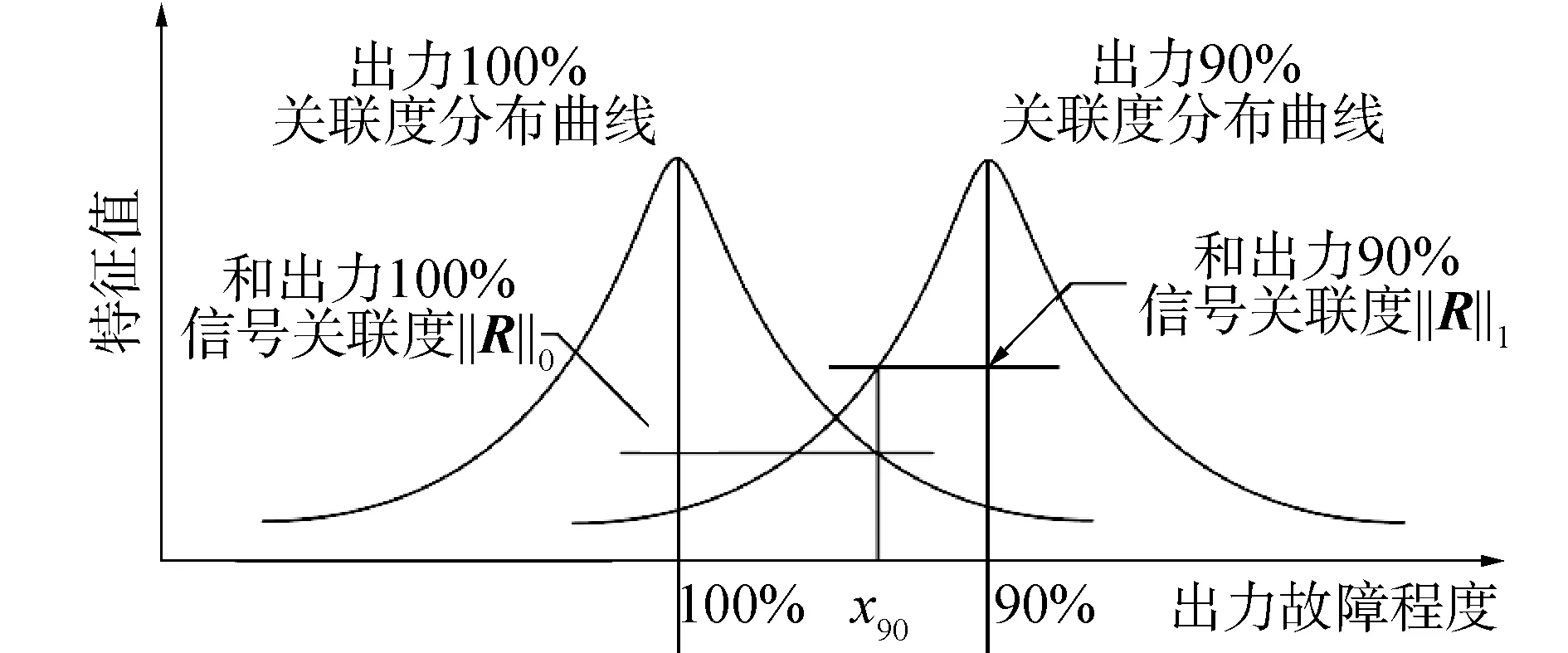
圖4 出力90%和出力100%故障信號的關(guān)聯(lián)度分布曲線Fig.4 Correlation degree of 90% and 100% failure output
4)確定最終辨識結(jié)果。
由圖4,當(dāng)確定了各故障程度的關(guān)聯(lián)度分布曲線的正態(tài)分布模型后,根據(jù)出力x90信號和出力100%信號關(guān)聯(lián)度‖R‖0,可得到出力9x%在關(guān)聯(lián)度分布曲線上離出力100%分布曲線中心的距離d0,同樣根據(jù)‖R‖1,也可得到出力x90離出力90%分布曲線中心的距離d1。則根據(jù)d0和d1,給出本文求取x90的計算方法,即最終辨識結(jié)果為:
(5)
式中:d1為x90離出力90%正態(tài)分布中心的距離;d0為x90離出力100%正態(tài)分布中心的距離。
3.3 結(jié)果對比
為了驗證本文所提基于正態(tài)分布模型方法處理關(guān)聯(lián)度方法在進(jìn)行推進(jìn)器故障辨識方面的有效性,分別采用本文方法和傳統(tǒng)GCA方法求取故障程度辨識結(jié)果,并將結(jié)果與實際AUV故障信號的故障程度進(jìn)行對比。
根據(jù)第2節(jié)中表3給出的AUV各故障程度下速度信號部分相對特征值,計算本文方法和傳統(tǒng)GCA方法的推進(jìn)器故障辨識結(jié)果,如表2所示。
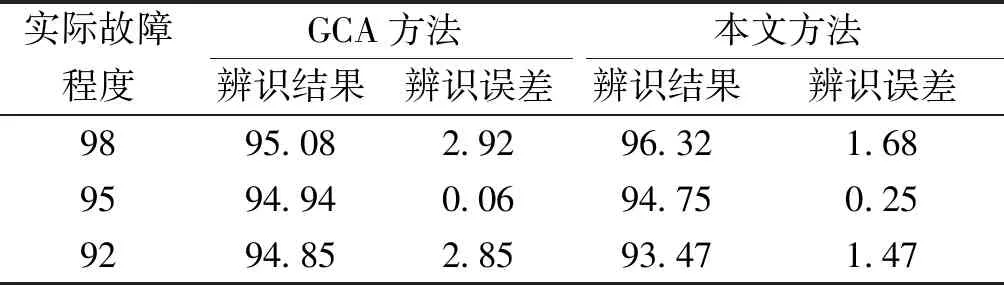
表2 AUV各信號故障程度辨識結(jié)果Table 2 AUV signal fault identification results %
分析表2的結(jié)果。從表2中可看出:傳統(tǒng)GCA方法在98%、95%、92%故障信號的辨識結(jié)果分別為95.08%,94.94%,94.85%,均向故障程度區(qū)間的中點(95%)處集中,且辨識誤差分別為2.92%,0.06%,2.85%;而本文方法在98%、95%、92%故障信號的辨識結(jié)果分別為96.32%,94.75%,93.47%,辨識誤差分別為1.68%、0.25%、1.47%。本文方法在98%、92%故障信號下的辨識誤差相比于傳統(tǒng)GCA方法分別降低了42.5%、48.4%,但是本文方法在95%故障信號下的辨識結(jié)果要差于傳統(tǒng)GCA方法,這主要是由于傳統(tǒng)GCA方法辨識結(jié)果在95%處集中導(dǎo)致。因此,實驗結(jié)果驗證了本文方法在對未在故障庫中的推進(jìn)器故障辨識方面的有效性。
4 結(jié)論
1)本文提出的基于特征值相對變化量的歸一化計算方法有效增強了變化范圍較小的特征量的變化規(guī)律,解決了傳統(tǒng)GCA方法直接進(jìn)行歸一化處理導(dǎo)致故障特征矩陣中變動量較小的特征量在故障程度辨識中所占比重被淡化的問題。
2)本文提出的基于故障信號類型進(jìn)行分類關(guān)聯(lián)計算故障特征向量關(guān)聯(lián)度的方法有效增強了推進(jìn)器弱故障辨識中故障信號之間的關(guān)聯(lián)效果,解決了傳統(tǒng)GCA方法在計算關(guān)聯(lián)度時未考慮不同類型的故障信號之間的差異,導(dǎo)致不同故障程度的參考信號和待辨識信號的關(guān)聯(lián)度計算結(jié)果偏低的問題。
3)本文提出的基于正態(tài)分布函數(shù)處理不同故障信號間關(guān)聯(lián)度的方法有效增強了對未在故障庫中的推進(jìn)器故障的辨識效果,解決了傳統(tǒng)GCA方法將待辨識信號和各參考信號的關(guān)聯(lián)度進(jìn)行加權(quán)平均計算,導(dǎo)致辨識誤差較大的問題。
本文針對不同故障程度的各類故障信號進(jìn)行故障辨識時,未考慮各類故障信號對辨識結(jié)果的影響程度可能不一樣。后續(xù)的研究工作可以針對解決這種不同類型信號在相同故障程度變化下關(guān)聯(lián)度不同的問題展開。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
電子制作(2018年11期)2018-08-04 03:25:42
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50