數字圖像識別處理技術在小型水庫水位觀測中的應用
2020-11-24 07:26:18鐘卓
水利規劃與設計 2020年11期
鐘 卓
(遼寧省本溪水文局,遼寧 本溪 117000)
1 問題的提出
遼寧省小(1)和小(2)型水庫分別為273座和412座,小型水庫汛期水位觀測時掌握當前水庫汛期特點,做好防汛決策的關鍵。遼寧省小型水庫水位目前是通過人工觀測方式進行,這種方式需要消耗大量的人力和物力,時效性也很難得到有效保證[1]。近些年來,雷達超聲波技術在水庫水位自動觀測中得到推廣和應用,但是由遼寧省小型水庫所在的區域地形和氣候的綜合影響,水位自動觀測設備的信息較易失真,影響水位觀測的精度,此外,雷達超短波水位自動觀測設備也會增加小型水庫的運行成本[2]。隨著電子信息化技術的快速發展,數字圖像識別技術逐步在水利領域中得到應用[3- 9],在水位觀測的應用也在近些年得到研究,李翊[10- 11]結合數值圖像處理技術對河道水尺刻度進行識別,但該技術對水尺整潔度要求較高,并對圖像觀測設備的安裝標準較高。王偉等[12]通過閾值分割和二值化方法對河岸圖像進行處理,對河岸水位進行推算,但由于河岸和水面邊緣的影響,使得計算誤差較大。為降低外界影響因素對數字圖像識別處理的影響,本文結合數字圖像信息處理數據,采用水位推算公式[13]對水位進行識別,并針對傳統夜間圖像觀測識別誤差大,引入一種基于引導濾波和全局對比度的夜間圖像增強算法[14- 15],改進夜間水位圖像觀測精度。研究成果可為小型水庫日常水位自動觀測提供一種新的手段。
2 研究途徑
采用最大類間方差方法對水位尺圖像進行技術處理,該算法將初始水位尺圖像根據初始閾值劃分成兩類,對不同類圖像的灰度值進行進行閾值的更新,并計算不同類間方差,當計算值最大,其閾值為最佳值,具體計算步驟為:
(1) 首先對灰度直方圖進行歸一化處理,圖像灰度直方圖概率分布計算方程:
pi=ni/N
(1)
式中,i—像素等級;ni—像素等級i的像素點的個數;N—圖像處理后的像素點的總數。
(2)對像素處理的分布概率ωi(t)和ui(t)的類均值進行初始化,分布概率和類均值的計算方程為:
(2)
(3)
式中,ω1—第一類分布概率初始值;ω2—第二類分布概率初始值;L—總的灰度級。 兩個圖像灰度分類的類均值計算方程分別為;
(4)
(5)
式中,μ1、μ2—第一類和第二類均值。
(3)圖像識別的平均灰度值計算方程為:
(6)
(4)對不同類的方差進行計算,計算方程分別為:
(7)
(8)
式中,σ1、σ2—第一類和第二類的方差,在各類方差計算基礎上,分別對類內和類間的方差進行計算,計算方程分別為:
(9)
(10)
式中,σω、σB—類內和類間的方差;k—不同分類;T—整個灰度等級。 在類內和類間方差計算基礎上,對整個灰度等級方差進行計算,方程為:
(11)
式中各變量同其他方程變量含義一致。在總灰度計算的基礎上,通過計算最佳的閾值,來對水位尺圖像進行分隔處理,最佳閾值的計算方程為:
(12)
式中,S—最佳計算閾值。通過計算閾值對其液面與水尺交界處的水尺讀數進行提取。
此外考慮到夜間圖像識別的誤差問題,采用引導濾波和全局對比度的夜間圖像增強算法,對夜間水位尺圖像進行增強處理,其主要的及時流程如圖1所示。
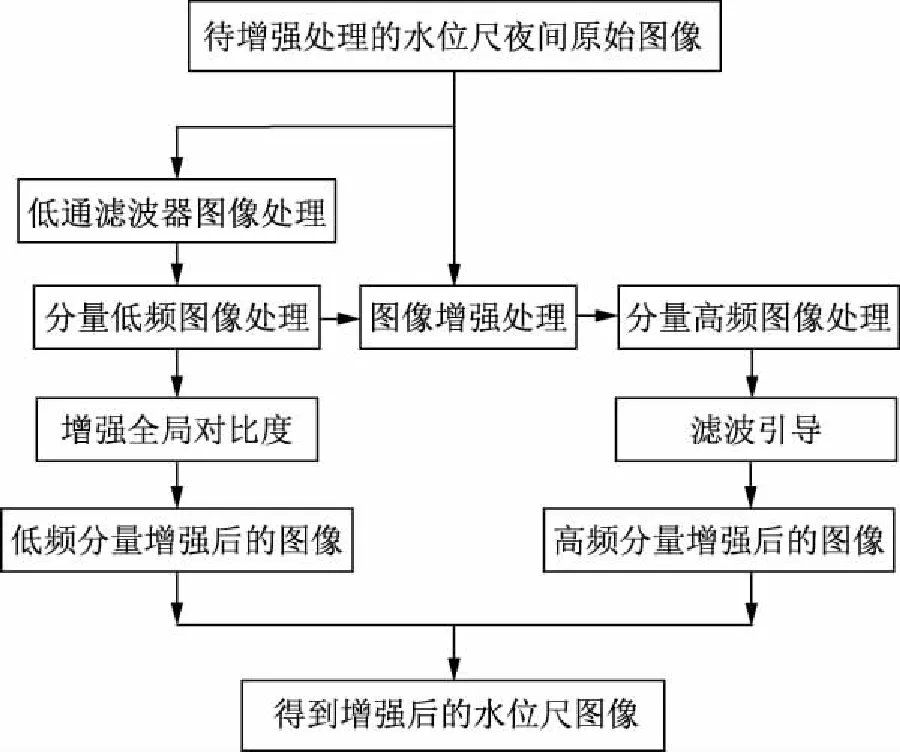
圖1 基于濾波和全局對比算法的夜間水尺增強流程圖
3 具體實例分析
以遼寧本溪地區小型水庫為研究實例,水庫為小(1)型水庫,集水面積分別為20km2,水庫主要功能是防洪和供水,校核洪水為為326.26m,當前水庫的主要水位報汛方式主要是當地庫管員通過人工觀測后,結合手機報汛系統,按報汛時間發送當前水位。這種方式存在時效性不高的問題,尤其是在防汛關鍵期,若不能及時報汛水庫水位,難以支撐水庫下游防汛決策。從2018年開始,在水利部技術推廣項目中,重點推廣應用數字圖像處理方式進行水位自動觀測的一種方式,作為試點水庫,開展了該水庫數字圖像水位觀測的應用試驗,結合數字圖像處理的水庫水位數據和人工觀測的水位數據,分析水位觀測誤差。
4 問題解決效果對比
4.1 不同圖像處理算法的誤差對比
結合常用的4種圖像處理方式,對比分析了白天水庫不同水位級下的水位識別值和人工觀測值之間的誤差,誤差結果分別見表1,各圖像處理結果如圖2所示。
考慮到不同水位級對圖像處理數值讀取的影響,分別采用該水庫高、中、低三個水位級對不同算法下的水位值識別誤差進行分析,數字圖像的原理采用通過圖像識別后,通過灰度處理,經過不同算法分析后,對其進行水位數值的識別,當前在圖像處理中常用的算法有本文涉及的6種,單通道和雙通道算法下通過灰度處理對其水位刻度尺數值進行分析,如圖3中的單通道和雙通道算法處理效果,但這兩種算法不同水位級下的誤差在-0.81~1.36m之間,總體水位觀測誤差較大,而融合算法下由于去除了邊界顏色的影響,各水位計下的誤差值都較單通道和雙通道有所好轉。該算法下水位和人工觀測水位誤差在0.6~1.79 m之間,低水位下誤差值最大,高水位下誤差有明顯改善。引導濾波算法下相比于前四種算法在水位誤差識別上有著明顯改善,在高、中、低三個水位級下對比誤差在0.36~0.37之間,基本可滿足水位觀測的誤差范圍要求,且在不同水位級下誤差差距較小。本文算法結合律引導濾波算法的優點,并通過分量低頻處理,改進了水位識別的誤差效率,相比于其他算法,水位觀測誤差得到明顯提升,可有效滿足水庫水位觀測的精度需求。
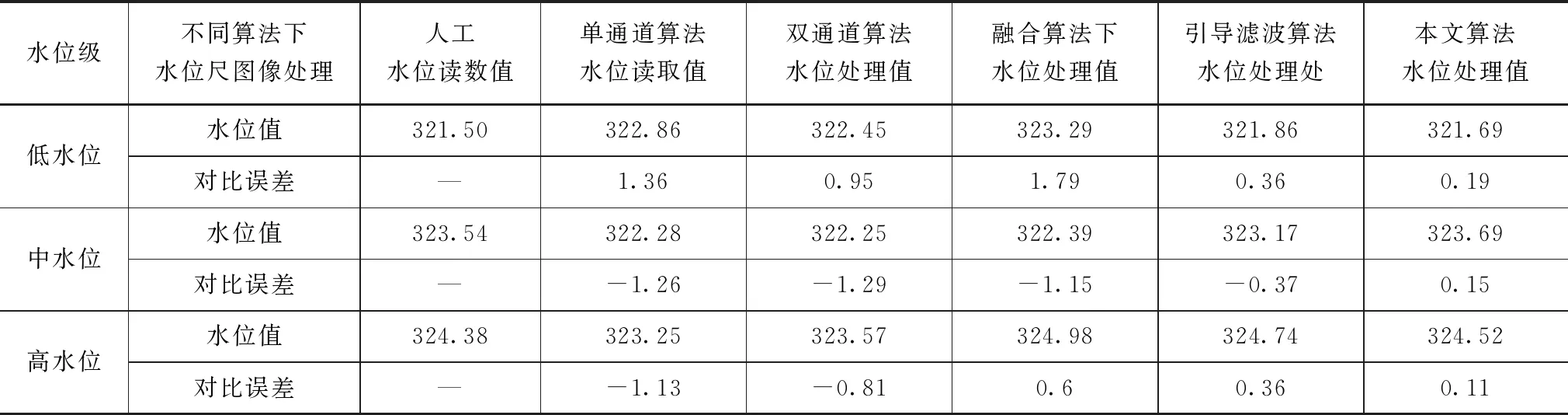
表1 不同圖像處理算法下低水位數值誤差對比結果 單位:m
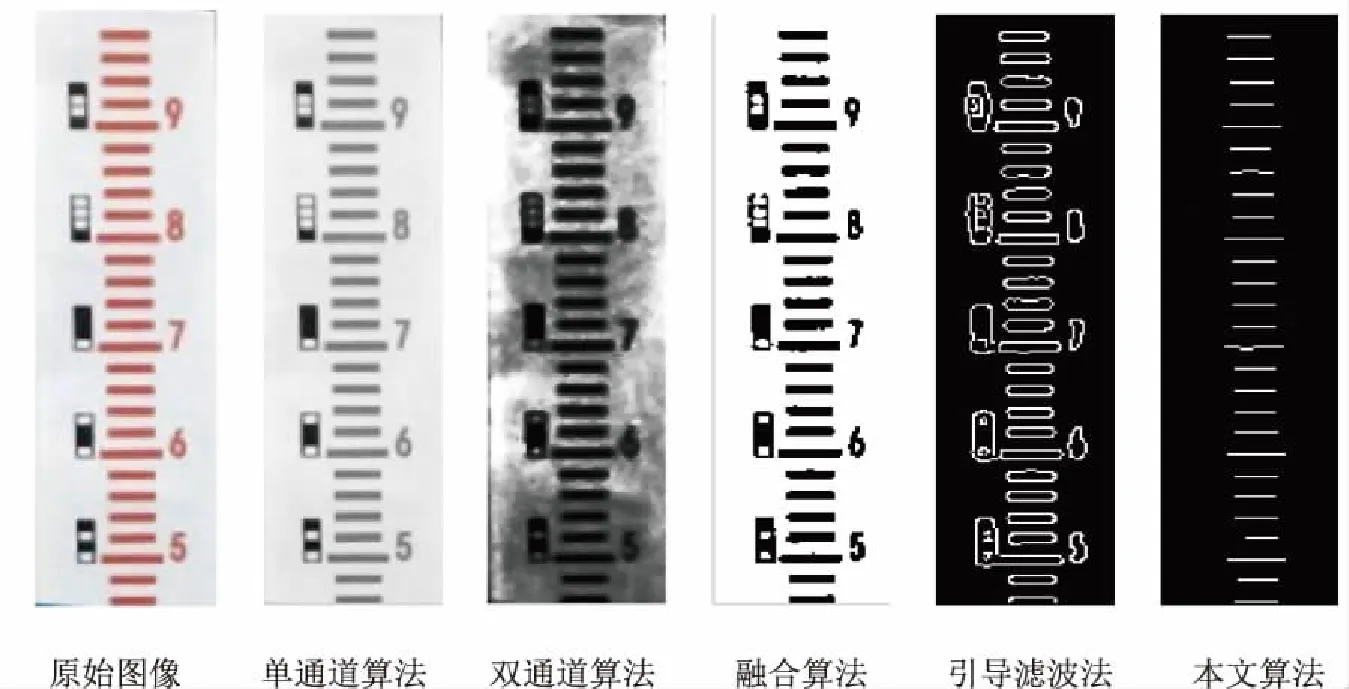
圖2 水庫不同算法水位尺圖像處理結果
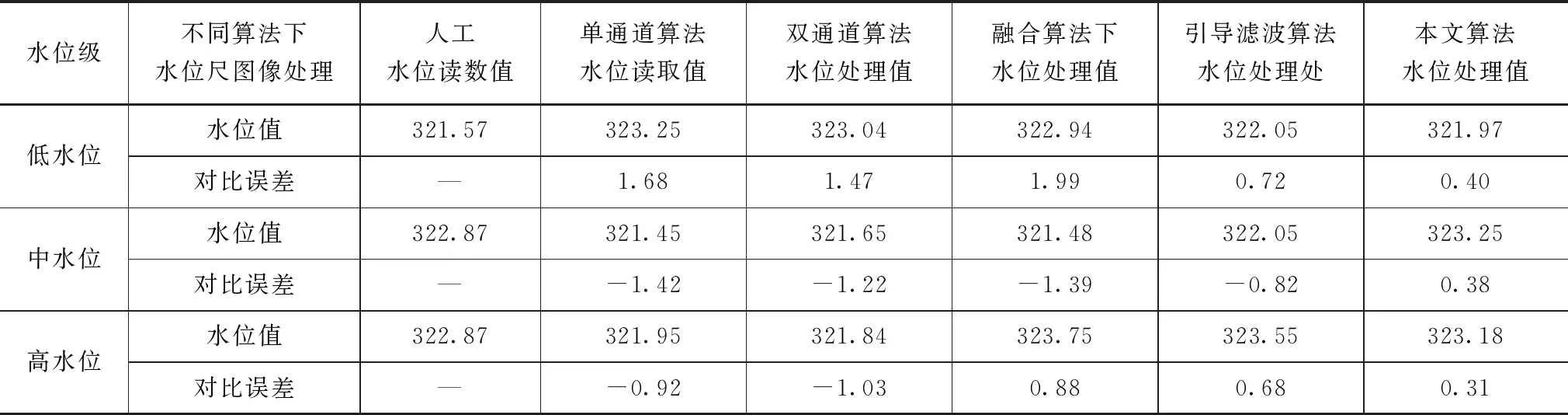
表2 夜間各水位級下不同算法下圖像處理水位誤差對比結果 單位:m
4.2 夜間水位尺圖像誤差對比結果
夜間水位尺識別誤差要低于白天,對不同水位下夜間各水位級的觀測誤差進行了對比分析,結果見表2,并對比改進算法前后對水位尺的圖像增強效果,如圖3所示。
夜間水位尺識別誤差是檢驗圖像處理技術的重要標準,從誤差分析結果可看出,采用各算法下夜間水位尺識別誤差較白天都有所增加,這主要是因為夜間水位尺受到光度影響,圖像識別誤差勢必增加。從誤差分析結果可看出,本文主要針對傳統算法夜間水位尺識別誤差較大的問題,對不同分量高頻和低頻圖像進行全局圖像增強處理,使得高頻和低頻圖像效果得到增強,圖4為圖像增強處理后的效果,從圖像識別增強處理后,可以對水位尺的刻度進行有效識別,從誤差分析結果可看出,在夜間,本文算法下的誤差值也明顯低于其他算法,可見采用圖像增強處理后,可以降低夜間的水位尺識別誤差。
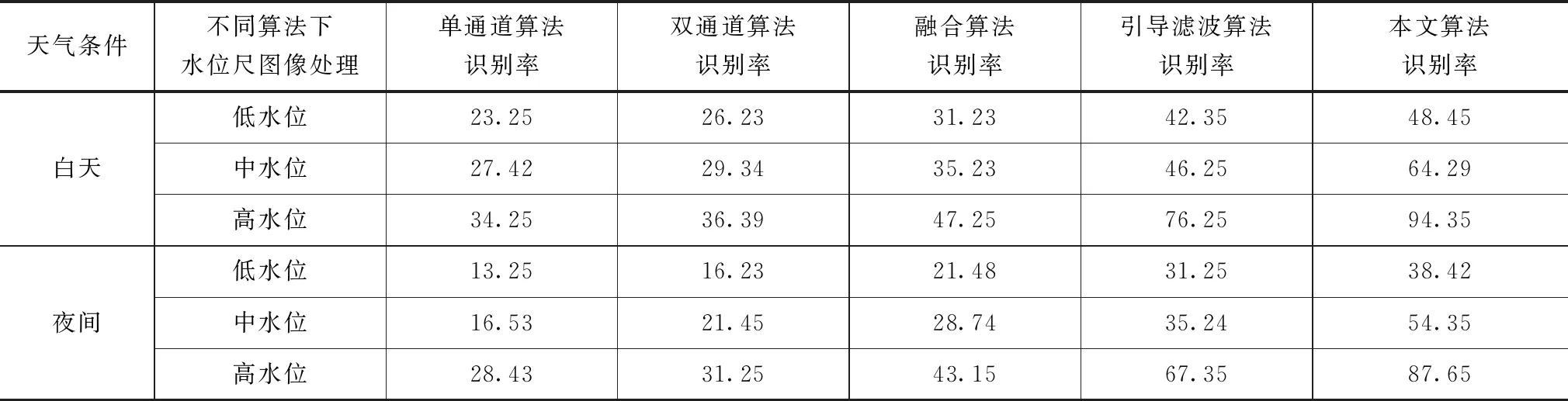
表3 不同天氣條件下各水位級下不同算法處理的水位識別率對比結果 單位:%

圖3 本文改進算法下的水位圖像夜間增強效果
4.3 不同圖像處理方法下水位識別率分析結果
對不同圖像處理方法的各水位級下的圖像識別率進行定量分析,分析結果見表3。
從對比結果可看出,夜間各算法下圖像識別率要明顯低于白天條件下的水位尺圖像識別率,在白天天氣條件下,各算法不同水位的水尺識別率在
23.25%~94.35%之間,單通道算法識別率最低,本文算法由于融合了各算法的優點,在低水位的識別率也可以達到48.45%,而在夜間天氣條件下,各算法下的水位尺識別率有所降低,本文算法下各水位計下的圖像識別率在38.42%~87.65%之間,可滿足水庫水位識別的規范要求。
4.4 水位尺圖像處理不同算法下最優灰度和梯度分析
水位尺圖像處理主要結合灰度處理原理,并對灰度的梯度進行優化,本文對不同水位級各算法下的最優灰度及梯度進行了分析,結果見表4。
水位尺圖像的像素處理主要通過調整圖像的灰度值進行分析,未經過圖像處理前,原始圖像的灰度值范圍在0~0.2之間,從分析結果可看出,單通道、雙通道以及融合算法下圖像最佳灰度值未得到明顯的改善,為采用引導濾波和本文算法下的對灰度的差異度進行了明顯的提升,并對圖像的目標和標尺進行了不同灰度的區劃,此外從表中還可看出在不同水位級下本文算法對圖像離散度有所增強。圖像最佳梯度是反映對水位尺圖像紋理以及對比度的定量分析指標,從最佳梯度的分析結果可看出,相比于其他算法,引導濾波算法和本文算法在各水位級下的最佳梯度都有所減少,從最佳梯度的變化情況而言,采用引導濾波算法和本文算法對水位尺圖像邊緣識別更為清晰,有助于對水位尺邊緣刻度的分析。
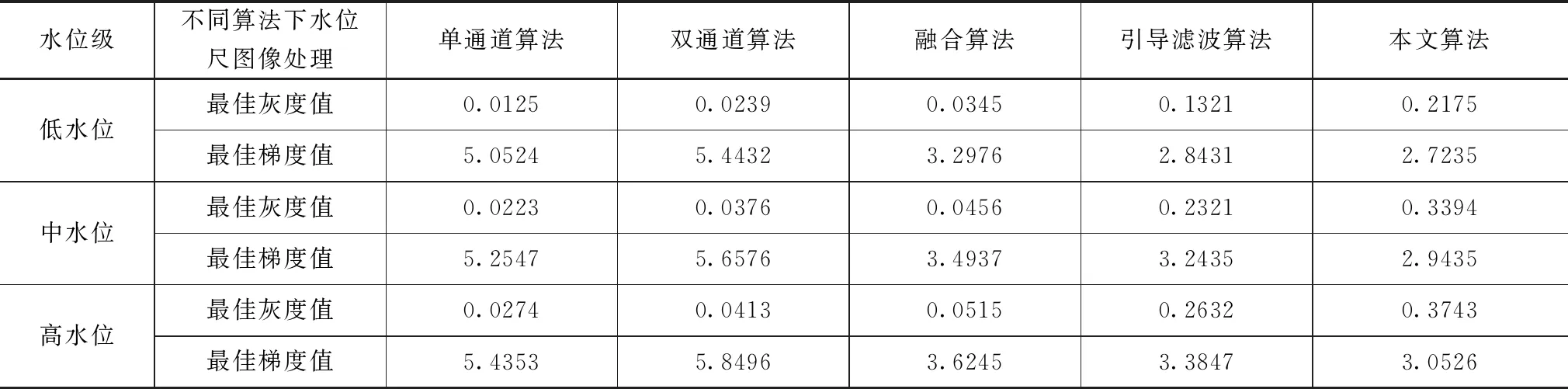
表4 不同水位級下水位尺圖像最佳灰度和最佳梯度值
5 結語
(1)對低頻圖像進行全局增強對比度,采用引導濾波對高頻圖像進行處理,可有效增強夜間水位尺的識別效果,相比于傳統圖像處理方法,夜間水位尺識別率平均可提高30%以上。
(2)在采用本文算法進行水庫水尺圖形處理時,建議最佳灰度值為0.2175(低水位)、0.3394(中水位)以及0.3743(高水位),結合水庫實際情況,在該范圍內進行調整,調整幅度在±0.5之間。
(3)本文未考慮其他天氣條件下對水庫水位圖像識別率的影響,尤其是雨天天氣條件下,在以后的研究中還應考慮復雜天氣條件下對水庫水位圖像識別的影響,增強算法的適用度。