基于激光傳感器的立體車庫智能控制系統設計
2020-11-26 09:21:36徐有軍
通信電源技術 2020年15期
徐有軍
(南京交通職業技術學院 軌道交通學院,江蘇 南京 211188)
0 引 言
傳統立體車庫智能系統通常采用射頻識別和無線傳感網絡等技術,用于實現對立體車庫的調度和管理[1]。但是,隨著車庫中車輛的不斷增加,系統在實際運行過程中容易出現調度和管理數據混亂的問題,嚴重影響系統的智能化管理水平。針對這一問題,本文結合一種新興的激光全息掃描技術,設計了一種全新的立體車庫智能系統。
1 系統硬件設計
1.1 傳感器
1.1.1 光電開關
車輛存在與否、車輛正確到位與否以及安全保護檢測,都使用了光電開關。本文選用直流三線NPN常開型光電開關。他的實物與接線原理如圖1所示。
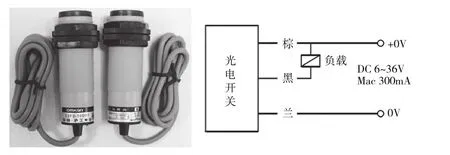
圖1 光電開關實物圖及其接線原理
將型號為E3F-DS100C4的紅外漫反射式光電開關安裝在每臺車面板的任意一側,用于檢測1 m范圍內的不透明物體和5 m范圍內是否有車輛停放。將型號為E3F-5DN1-5L的對射式紅外光電對管安裝在每臺車面板的四個角,用于檢測5 m范圍內的不透明物體,輔助提示車輛是否正常停放。將對射式紅外光電開關安裝在車庫立柱的兩側,用于檢測10 m范圍內的不透明物體和是否有人或物誤入停車區域,以防止車輛移動時對人、侵入物以及車庫本身造成傷害。
1.1.2 基于激光全息掃描的傳感器選擇
采用激光全息掃描技術,實現對立體車庫長、寬、高尺寸參數的測量。本文采用CNS-LC3660型號激光全息掃描傳感器,檢測范圍最大可達4.5 m,整體掃描范圍為280°,角度分辨率為0.55°。在對車輛進行檢測時,它的響應時間約為45 ms。它具有128個選擇通道,且每個通道內包含4個區域防護,可通過開關量輸出保護區的開關量信息、傳感器的Error開關量信號以及Can BUS輸出開關量障礙物數據,實現對系統內其他各個硬件之間的互聯和互通,從而為系統提供更加完備的軟件功能配置。功能可替代傳統PBS—04JS和UST—04/15。在非人為干擾狀態下,該型號傳感器最長使用時間可達3年以上[2]。圖2為全息激光頭結構圖。
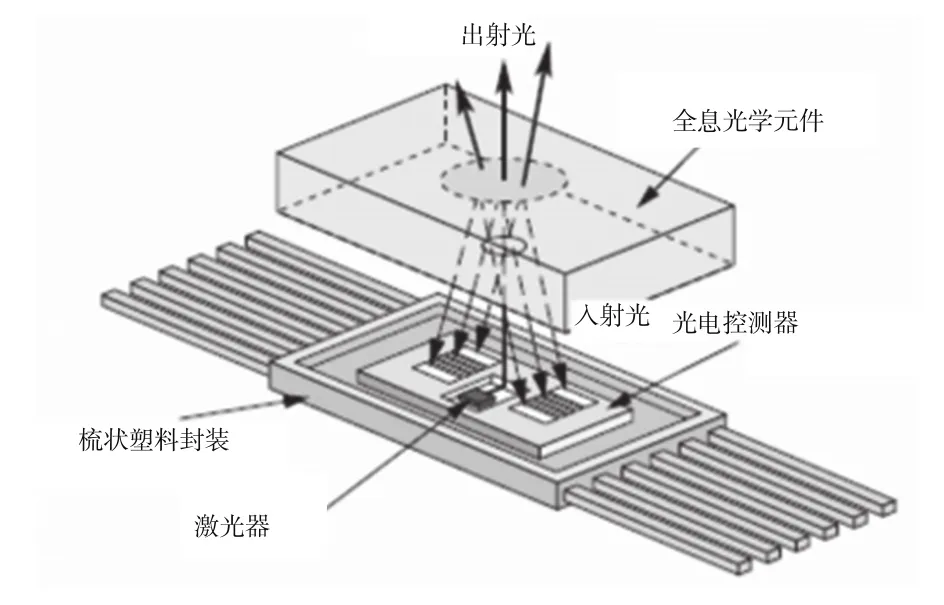
圖2 全息激光頭結構示意圖
CNS-LC3660型號激光全息掃描傳感器的日常工作電壓為DC 12~32 V,總功耗約為3 W,光源為激光,波長最長可達900 nm以上,光源等級為1。圖3為傳感器工作原理圖。
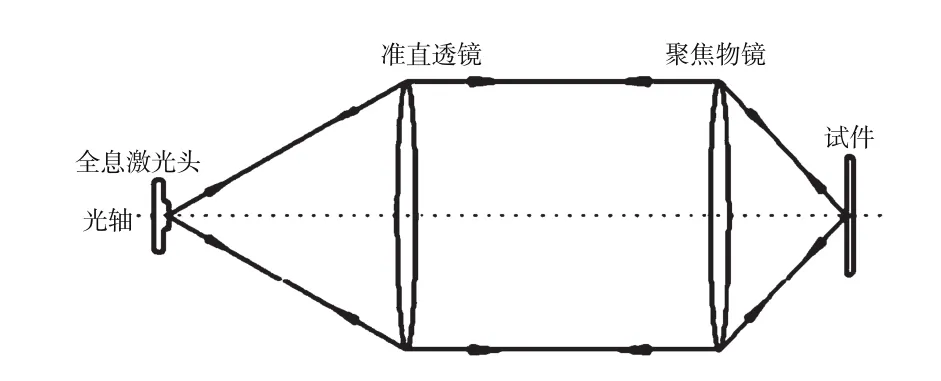
圖3 傳感器工作原理示意圖
1.2 系統電路設計
系統電路設計主要包括激光傳感器電路、超限檢測電路、停車到位檢測電路以及電源電路等。后兩種電路可沿用傳統立體車庫智能系統中的電路,因此下面將重點對結合激光全息掃描的傳感器電路和超限檢測電路進行詳細的設計說明。
激光全息掃描傳感器電路主要包括發送激光端和接收激光端。系統中的激光傳感器均成對出現,因此在激光信號的發送端應設置對應的激光發射,并利用對準設備調整激光,使其發射的激光光束能夠直接照射到相應的接收端。在接收激光端,通過光電接收裝置處理接收到的激光信號,從而得到開關量信號并傳輸到單片機中。激光傳感器電路設計如圖4所示。
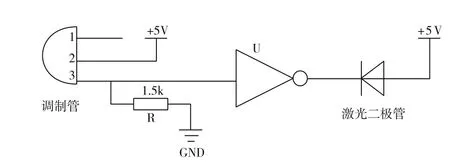
圖4 激光傳感器電路設計圖
圖2中的調制管結構相當于一個集成電路,其中包含鎖相環電路和自動增益控制等多種不同類型的集成電路。通過調制管發出事先特定的頻率震蕩波,實現對激光管的發光控制。
系統中停車到位檢測和車輛數量超限制檢測的電路設計,采用用于光電測試的電路設計方法。當有車輛進入立體車庫時,通過單片機控制激光全息掃描傳感器開始工作。當單片機為低電平時,表示車庫內的車輛超過限度,單片機立即發出警報信號,并亮起超出限度的指示燈,同時提醒車主車輛超限,無法進行停車[3]。
2 系統軟件設計
2.1 立體車庫車位信息采集與處理
立體車庫中車位的信息主要包括車盤是否水平或垂直、車位是否停放車輛以及車位附屬激光傳感器信息等。這幾種信息均為數字信號,因此在采集車位信息時只涉及對數字信號的采集。系統涉及的數字信號輸入電路為6路,數字信號的輸入端為低電平觸發端,另一端掛高電位為48 V。當相應的車位信息數字信號輸入回路導通時,發光二極管開始發光,并表示在該回路上存在數字信號傳輸。利用光耦對輸入的數字信號和內部電路進行電光隔離,可防止在信號傳輸過程中受到外界的干擾。同時,可將光耦作為選通線,利用線選方式不斷擴展輸入的點數,從而滿足日后系統的升級和更新需要。
2.2 PLC控制
系統中的PLC控制主要分為管理層和測控層。管理層主要負責立體車庫的日常計費和打印單據等工作,還包括對測控層的實時通信管理。測控層主要負責對立體車庫內車輛取車控制、位置檢測以及安全檢測等操作。由于各個功能的需要,測控層應當具備一定的工作可靠性和更加快速的響應時間。本文采用PLC控制,通過執行相應的程序來控制立體車庫內的各個控制環節。
3 對比實驗
3.1 實驗準備
為進一步測試提出的基于激光全息掃描的立體車庫智能系統的應用性能,充分調試系統,利用DSP++仿真實驗軟件,構建本文系統與傳統系統的仿真模型和運行環境。在仿真實驗環境中搭建一個規格為300 m×500 m×40 m的三維立體車庫模型,設置車庫的激光傳感信息采集的中心頻率為15 kHz,車輛信息規模數量為2 000,將采集的激光全息掃描信息載入相應的數據庫中進行數據分析。具體地,分別在本文系統和傳統系統中模擬10輛、50輛、80輛、100輛以及150輛車輛的進出庫,比較兩組系統的時間開銷。
3.2 實驗結果與分析
根據實驗準備完成實驗,實驗結果如表1所示。出庫時間開銷,且車庫調度的均衡性更高。可見,提出的基于激光全息掃描的立體車庫智能系統可以大大縮短車輛進出庫的時間開銷,并提高了立體車庫的利用效率,具有更高的應用性能。
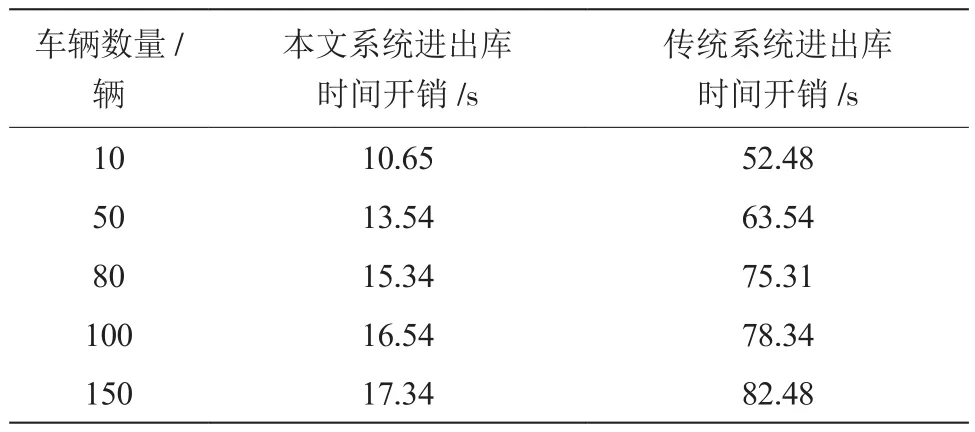
表1 實驗對比表
4 結 論
結合當前建筑布局規劃和立體車庫停車特點,提出一種基于激光全息掃描的立體車庫智能系統,從而實現對立體車庫車輛入庫、出庫檢測及引導智能控制。本文研究立體車庫的定位及引導系統設計,具有一定的參考價值。今后還將深入研究如何優化行車路線和如何做好立體車庫的運行管理。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
