基于簡(jiǎn)化超球體SRUKF的FOG和SS組合定姿算法
2020-11-26 09:22:04聶高勝朱高興
通信電源技術(shù) 2020年15期
聶高勝,朱高興
(江西師范高等專科學(xué)校 物聯(lián)網(wǎng)學(xué)院,江西 鷹潭 335000)
0 引 言
衛(wèi)星一般采用光纖陀螺實(shí)現(xiàn)定姿。光纖陀螺是一種基于Sagnac效應(yīng)的角速度傳感器,與傳統(tǒng)的機(jī)械陀螺相比具有重量輕、體積小、動(dòng)態(tài)范圍大、實(shí)時(shí)性好以及抗干擾能力強(qiáng)等優(yōu)點(diǎn),但存在解算姿態(tài)誤差隨時(shí)間積累的缺陷。星敏感器是一種通過(guò)測(cè)量恒星而實(shí)現(xiàn)定姿的天文傳感儀器,具有測(cè)量精度高、不受外界干擾等優(yōu)點(diǎn),但實(shí)時(shí)性較差。兩者組合到一起定姿,可優(yōu)勢(shì)互補(bǔ),形成一種長(zhǎng)航時(shí)衛(wèi)星定姿方式[1]。
光纖陀螺與星敏感器的信息融合一般采用卡爾曼濾波算法。卡爾曼濾波較適用于線性系統(tǒng),對(duì)非線性系統(tǒng)的處理效果較差,但現(xiàn)實(shí)中的系統(tǒng)基本都是非線性系統(tǒng)。文獻(xiàn)[2]將簡(jiǎn)化無(wú)跡卡爾曼濾波(Simple Unscented Kalman Filter,SUKF)應(yīng)用到慣導(dǎo)系統(tǒng)的非線性初始對(duì)準(zhǔn),取得了很好的效果;文獻(xiàn)[3-4]分別將SUKF應(yīng)用到慣導(dǎo)與GPS和慣導(dǎo)與地磁的非線性組合導(dǎo)航中,實(shí)現(xiàn)了更高精度的定位定向。本文則首次將SUKF算法應(yīng)用到光纖陀螺與星敏感器的組合定姿中,通過(guò)建立簡(jiǎn)化組合系統(tǒng)模型,采用反饋陀螺漂移誤差校正姿態(tài)的方式,實(shí)現(xiàn)了更高精度的光纖陀螺和星敏感器組合定姿。
1 姿態(tài)解算算法原理
光纖陀螺和星敏感器組合算法原理如圖1所示。其中:φFOG、θFOG、γFOG為三軸光纖陀螺系統(tǒng)解算得到的三維姿態(tài);φSS、θSS、γSS為星敏感器解算得到的三維姿態(tài);εX、εY、εZ為濾波過(guò)程中估算的三維陀螺誤差。光纖陀螺系統(tǒng)輸出三維慣性姿態(tài)信息,星敏感器輸出三維星敏姿態(tài)信息,利用簡(jiǎn)化的SUKF算法,將兩者姿態(tài)角信息之差作為觀測(cè)量進(jìn)行最優(yōu)濾波,并用濾波過(guò)程中估算的陀螺誤差修正慣導(dǎo)輸出,從而提高組合系統(tǒng)的姿態(tài)解算精度。
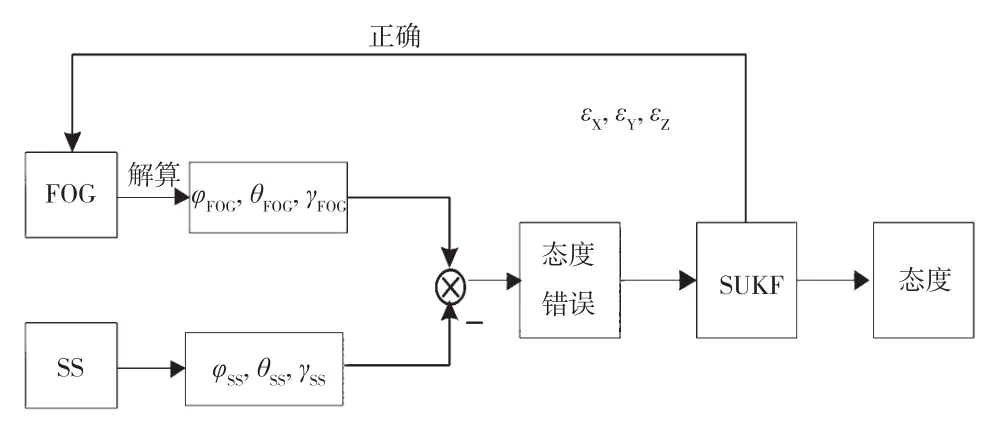
圖1 光纖陀螺和星敏感器組合定姿算法原理框圖
2 光纖陀螺和星敏感器組合系統(tǒng)模型建立
2.1 狀態(tài)模型
選擇東北天地理坐標(biāo)系(E、N、U)為導(dǎo)航坐標(biāo)系,建立卡爾曼濾波的狀態(tài)方程為:

式(1)中,組合導(dǎo)航系統(tǒng)的狀態(tài)量為:

式中,φE、φN、φU為三維姿態(tài)誤差角,εE、εN、εU為三維陀螺常值漂移。
系統(tǒng)的狀態(tài)轉(zhuǎn)移矩陣Fk(t)為:

式(3)中,F(xiàn)N中的元素與慣導(dǎo)系統(tǒng)的誤差方程相對(duì)應(yīng),Cbn為捷聯(lián)姿態(tài)矩陣。
系統(tǒng)的噪聲轉(zhuǎn)移矩陣為:
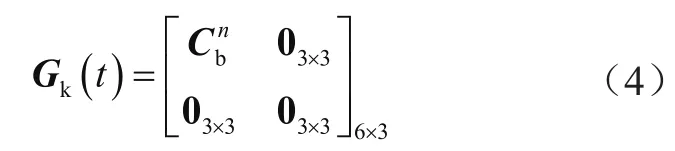
系統(tǒng)噪聲矢量為:

2.2 量測(cè)模型
根據(jù)量測(cè)信息建立的量測(cè)方程為:

其中,Y(t)=[φx,φy,φz]T,量測(cè)矩陣為H(t)=[I3×303×3],v(t)為量測(cè)噪聲矩陣。
3 SUKF濾波算法簡(jiǎn)介
無(wú)跡卡爾曼濾波是一種非線性濾波方法。對(duì)于非線性系統(tǒng),它的濾波性能優(yōu)于卡爾曼濾波。
假設(shè)一個(gè)維數(shù)為n的離散化非線性系統(tǒng)方程和量測(cè)方程為:
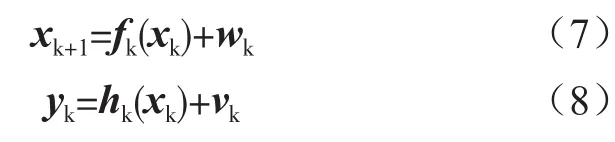
其中,xk為系統(tǒng)的狀態(tài)向量矩陣,fk為狀態(tài)變量的傳播函數(shù),wk為系統(tǒng)的噪聲向量,yk為量測(cè)向量,hk為量測(cè)向量矩陣,vk為系統(tǒng)量測(cè)噪聲向量。
SUKF濾波的本質(zhì)是通過(guò)在的附近構(gòu)造一組Sigma采樣點(diǎn),并計(jì)算Sigma采樣點(diǎn),估計(jì)出狀態(tài)一步預(yù)測(cè)和一步預(yù)測(cè)均方差,從而進(jìn)行濾波,具體算法過(guò)程描述如下。
首先,設(shè)定濾波的初始值,即:


其次,計(jì)算Sigma采樣點(diǎn)。此時(shí),根據(jù)i的取值,分3種情況進(jìn)行討論。
(1)當(dāng)i=0時(shí),有
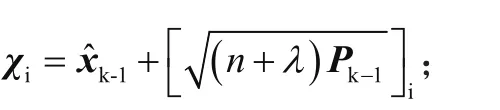
(2)當(dāng)i=1,2,…,n時(shí),有
(3)當(dāng)i=n+1,…,2n時(shí),有
其中,λ=α2(n+k)-n為標(biāo)量。α是很小的正數(shù),可取10-4≤α≤1,k通常設(shè)置為零。
再次,通過(guò)時(shí)間更新方程更新時(shí)間信息,具體為:
最后,量測(cè)更新方程為:
其中,β的取值與x的分布有關(guān),通常高斯分布的x取值為2。
4 仿真試驗(yàn)驗(yàn)證
試驗(yàn)選用三軸的光纖陀螺產(chǎn)品,陀螺常值漂移為0.05°/h(1σ),是衡量陀螺性能的關(guān)鍵指標(biāo)。陀螺置于帶有北向基準(zhǔn)的測(cè)試平臺(tái)上,通電穩(wěn)定后采集三向陀螺3 600 s靜態(tài)輸出原始數(shù)據(jù);星敏感器的量測(cè)精度設(shè)為1'',計(jì)算機(jī)仿真生成導(dǎo)航坐標(biāo)系下3 600 s靜態(tài)的三向姿態(tài)數(shù)據(jù)用作星敏感器的靜態(tài)導(dǎo)航輸出數(shù)據(jù)。分別用純FOG、卡爾曼濾波(KF)和簡(jiǎn)化SUKF濾波算法進(jìn)行離線仿真計(jì)算,并對(duì)比分析解算結(jié)果。3種解算方法的姿態(tài)解算結(jié)果對(duì)比如圖2所示。可以看出,簡(jiǎn)化SUKF濾波算法解算的三向姿態(tài)角誤差明顯小于其他兩種方法。

圖2 3種算法解算的航向角誤差對(duì)比
由于3種算法的組合導(dǎo)航誤差曲線都比較平滑,可以用姿態(tài)的最大誤差和標(biāo)準(zhǔn)差來(lái)評(píng)價(jià)其精度水平。表1列出了3種算法的統(tǒng)計(jì)結(jié)果,其中航向角、俯仰角以及橫滾角是衡量姿態(tài)的3個(gè)重要指標(biāo)。
由仿真結(jié)果可見(jiàn),在相同的3 600 s導(dǎo)航時(shí)間內(nèi),簡(jiǎn)化SUKF算法解算的三向姿態(tài)最大誤差約是KF算法的20%,約是純FOG算法的5%,SUKF算法解算的三向姿態(tài)標(biāo)準(zhǔn)差約是KF算法的16%,約是純FOG算法的6%。可見(jiàn),相比純FOG和KF算法,簡(jiǎn)化SUKF算法可得到更高精度的姿態(tài)角。因?qū)Ш秸`差有隨機(jī)性和隨時(shí)間發(fā)散性,最大誤差和標(biāo)準(zhǔn)差都是指3 600 s內(nèi)時(shí)間段內(nèi)所有數(shù)據(jù)對(duì)于同一方法同一指標(biāo)的結(jié)果。比如,SUKF方法“head”在3 600 s這個(gè)時(shí)間段的導(dǎo)航誤差最大誤差值是6.639,這段時(shí)間導(dǎo)航的標(biāo)椎差是1.602。
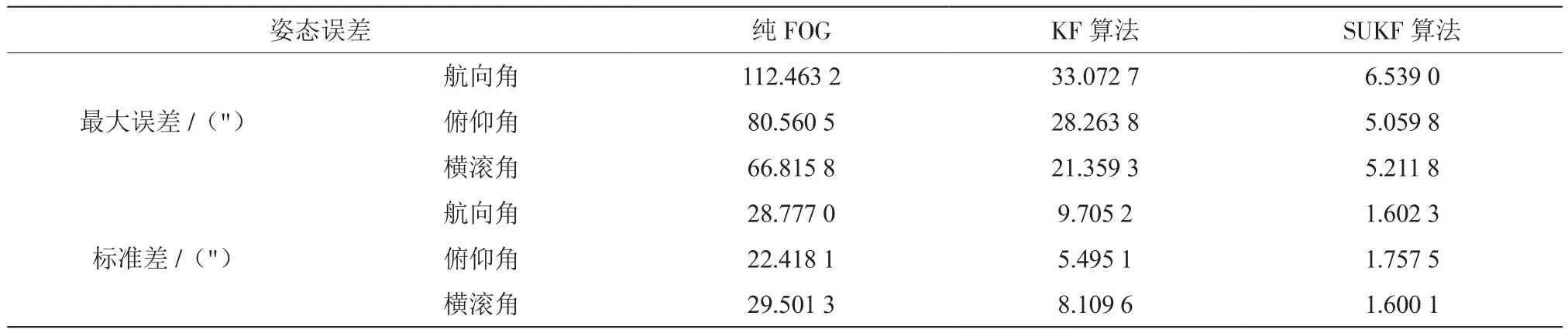
表1 3種算法解算的姿態(tài)誤差統(tǒng)計(jì)
5 結(jié) 論
仿真試驗(yàn)結(jié)果表明,將SUKF濾波算法應(yīng)用到光纖陀螺和星敏感器的組合定姿中,可很好地處理非線性系統(tǒng),且在長(zhǎng)航時(shí)比卡爾曼濾波和純FOG解算的姿態(tài)角精度更高,證明了SUKF濾波算法的正確性和可行性,可為其今后在衛(wèi)星定姿中的進(jìn)一步應(yīng)用提供理論參考。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
測(cè)控技術(shù)(2018年12期)2018-11-25 09:37:34
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
電源技術(shù)(2016年9期)2016-02-27 09:05:39
電源技術(shù)(2015年1期)2015-08-22 11:16:28
