基于單目視覺的堆芯組件間距測量技術研究
2020-11-26 03:47:24謝晨江許小進
機械工程師 2020年10期
關鍵詞:測量
謝晨江, 許小進
(國核電站運行服務技術有限公司,上海200233)
0 引 言
核電站運行期間,堆芯燃料組件長期處于高溫、高壓惡劣環境,受上部堆內構件約束,堆芯燃料組件正常間距約2 mm。電站停堆后,上部堆內構件移除后,組件上端上管座處于自由無約束狀態,上管座間距與正常值有一定偏差。間距異常的組件在卸料過程中容易磕碰周圍組件,使得裝卸料機載荷出現異常,從而影響核電廠卸料關鍵路徑;組件復堆后,間距異常的組件也會影響上部堆內構件回裝,嚴重者會導致上部堆內構件與燃料組件卡死,給下一次卸料造成較大風險。為了降低組件磕碰風險,優化核電廠卸料工藝,有必要對即將卸料的堆芯燃料組件進行間距識別,以評估組件堆芯分布情況,為下一步燃料組件轉運提供參考數據。本文結合組件燃料組件上管座特征和堆芯布置圖建立堆芯組件間距測量模型,基于單目視覺技術實現模擬組件間距進行測量,為堆芯組件間距測量提供思路和方法。
1 單目視覺測量原理
1.1 攝像機數學模型
攝像機單目視覺測量基于小孔成像模型,本質是通過4種坐標系的換算求解出像素坐標在三維世界坐標系中的坐標[1-2]。選擇模擬堆芯平面圖為待測面OwXwYwZw,Zw軸為垂直OwXwYw面豎直向上建立世界坐標系OwXwYwZw;選擇攝像機光軸中心為原點,建立攝像機坐標系OcXcYcZc,Zc軸方向平行攝像機光軸,并以攝像機光軸指向景物方向為正方向;圖像物理坐標系(x,y)是以光軸與像平面的交點為原點,以毫米為單位的二維坐標系;圖像像素坐標系(u,v)是以圖像左上角為原點,以像素為坐標單位的二維坐標系,u、v分別表示像素在數字圖像中的列數和行數。單目視覺坐標系[3-5]如圖1所示。
1.2 攝像機數學模型參數
將光軸中心線在成像平面交點的圖像坐標記為(u0,v0),則圖像點(u,v)在圖像物理坐標系下對應坐標(x2,y2)換算表達式為:
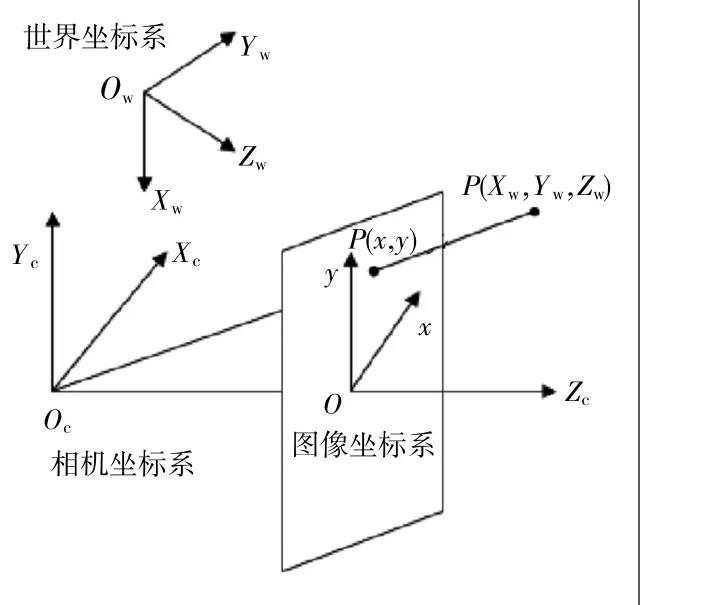
圖1 單目視覺坐標系
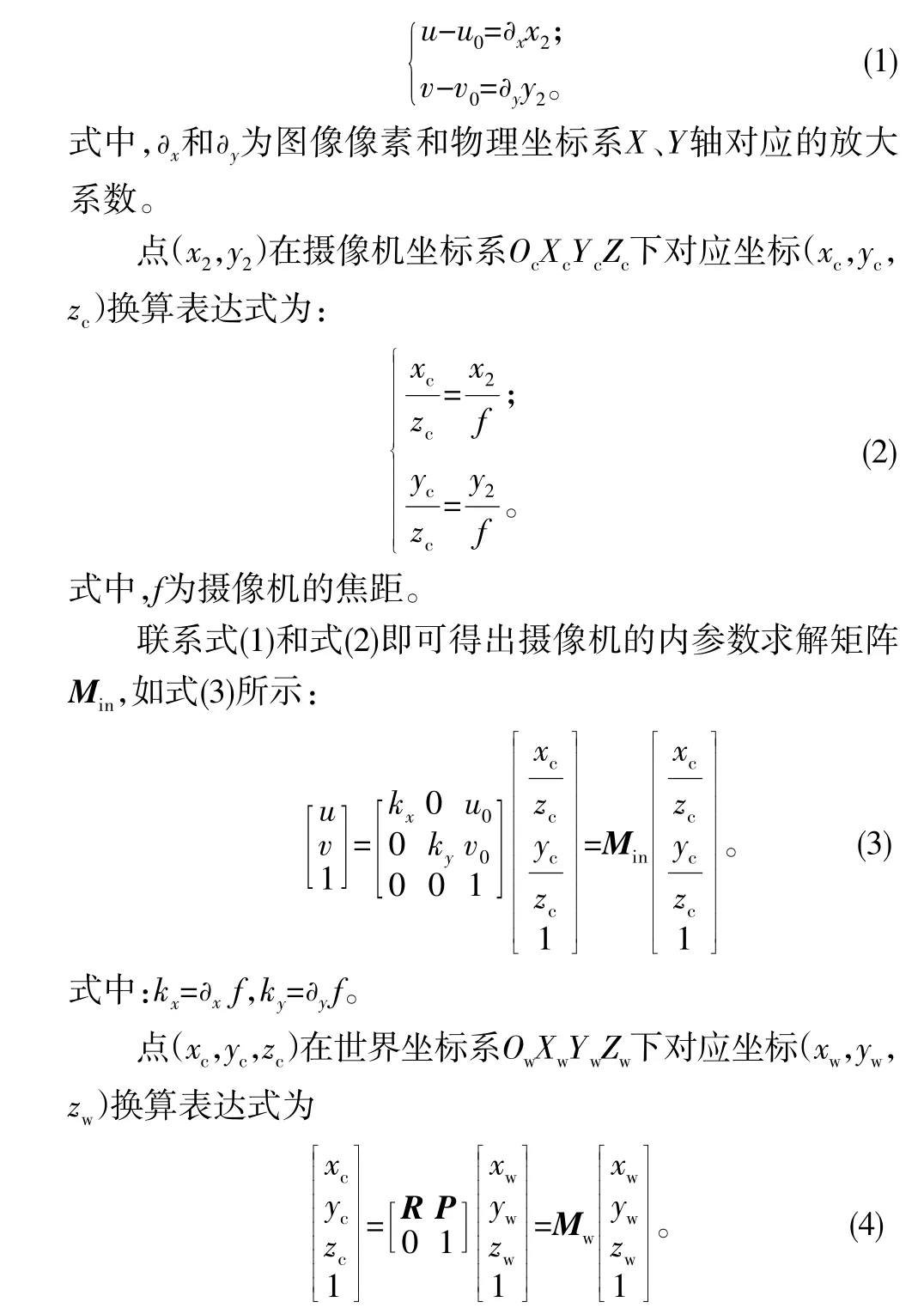
式中:R3×3為坐標系間對應的旋轉矩陣;P1×3為對應的平移向量;Mw為攝像機外參矩陣。
如果考慮鏡頭切向和徑向畸變,則攝像機數學模型需要求解的參數共有4種:攝像機內參,攝像機外參,攝像機鏡頭切向畸變和攝像機鏡頭徑向畸變。參數求解采用標定法求解,即在相機成像空間盡可能地拍攝標定用的標準圖像[6-8],通常為黑白棋 盤 格(如圖2)。計算結果示意如圖3所示。
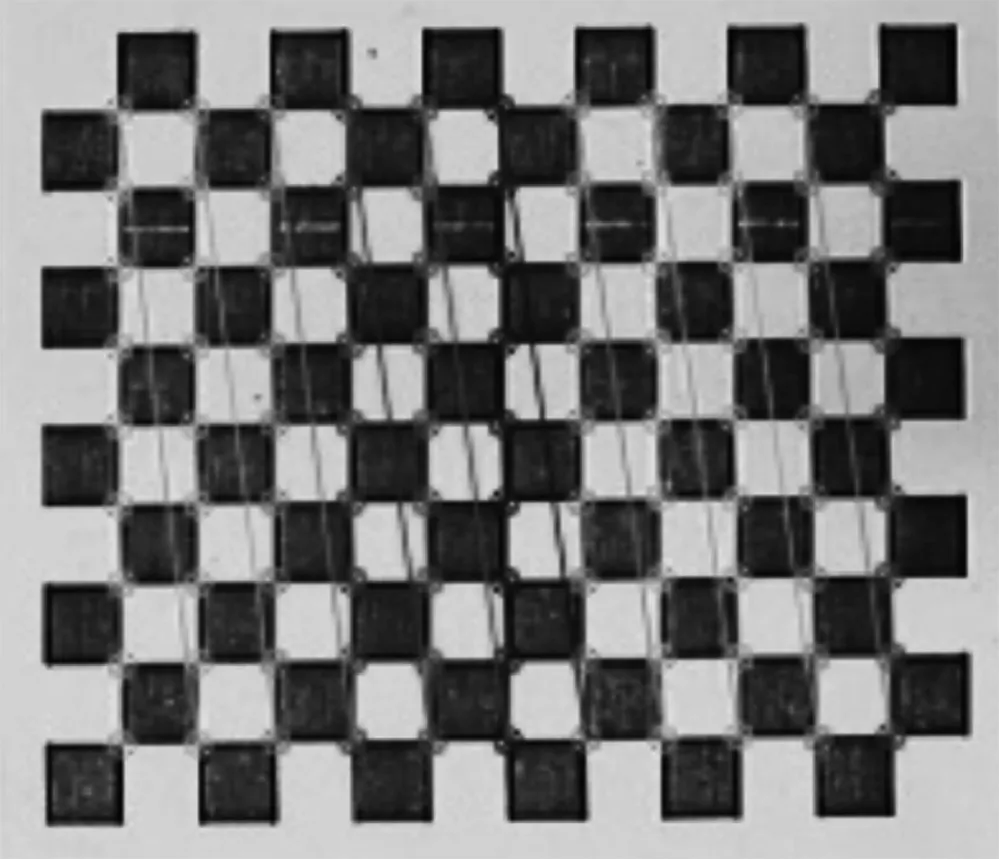
圖2 攝像機標定用圖片
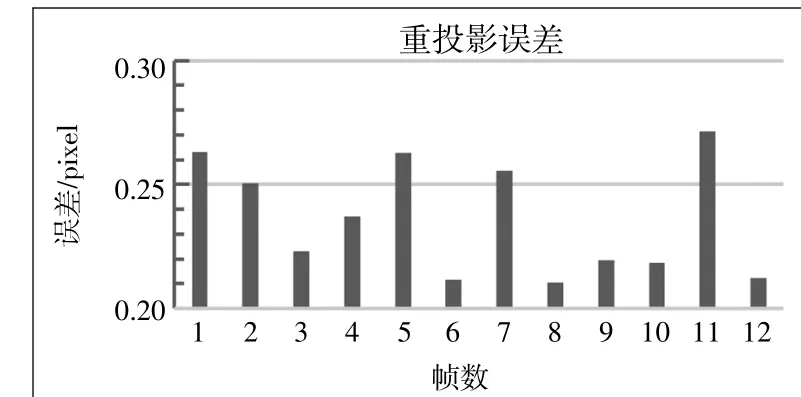
圖3 重投影誤差
2 模擬堆芯測量前準備

2.1 模擬堆芯測試平臺搭建
某大型先進壓水堆核電站堆芯處有157組燃料組件,燃料組件頂部為上管座,上管座特征如圖4所示。為模擬整個堆芯燃料組件分布并結合軟件算法開發,選擇上管座邊緣輪廓和S孔作為特征識別點繪制堆芯模擬平面圖。為檢測算法測量精度,設置M11、F10、L6、F5等4個驗證工位,M11工位X向偏移理想位置為4.5 mm,Y 向偏離理想位置為-2.5 mm;F10工位X向偏移理想位置為-2 mm,Y向偏離理想位置為1 mm;L6工位X向偏移理想位置為-3 mm,Y 向偏離理想位置為2 mm;F5工位X向偏移理想位置為-1 mm,Y向偏離理想位置為-1 mm。攝像機放置于堆芯模擬平面圖正上方1 m處,相機支撐框架采用鋁型材搭建,如圖5所示。組件間距測量時,通過移動攝像機,取得組件上表面圖像,通過標定數據對圖像進行矯正和坐標變換,然后通過識別算法,識別出組件上表面的S-hole特征,最后計算出相鄰組件之間的間距。攝像機采用Sony公司200萬像素CCD攝像機。
2.2 圖形化顯示界面設計
QT 是一個多平臺的圖形用戶界面開發框架,其獨特的信號與槽機制為圖形用戶界面開發提供極大的便利。這里選擇QT 作為組件間距測量上位機界面開發平臺,上位機測量顯示界面分為視頻顯示區、組件工位選擇提示區、圖片采集區和數據分析及顯示區,程序主要設計流程如圖6 所示。

圖4 組件上管座示意圖

圖5 測試平臺示意圖

圖6 程序流程圖
3 模擬堆芯組件間距測量結果及分析
在堆芯復查期間,核電站換料人員關心燃料組件間距和組件高差數值。通過組件間距數值監控,可以判斷堆內上部構件回裝是否合適;通過組件高差數值監控,可以判斷組件變形或堆芯下支撐板異物存在等情況。這里通過模擬堆芯實驗平臺,對模擬組件間距和相對高差進行測量并對結果進行分析。
3.1 驗證工位測量結果
人為對4 個驗證工位進行偏移,用于檢測并驗證算法測量精度。4 個工位間距的測量結果如圖7 所示。

圖7 M11、F10、L6、F5 工位測量結果圖
工位的誤差如表1 所示。從圖表中可以看出,4 個工位的平均誤差為0.15 mm,最大誤差為0.42 mm。因此,工位的測量值不論是平均誤差還是最大誤差均在允許范圍之內。
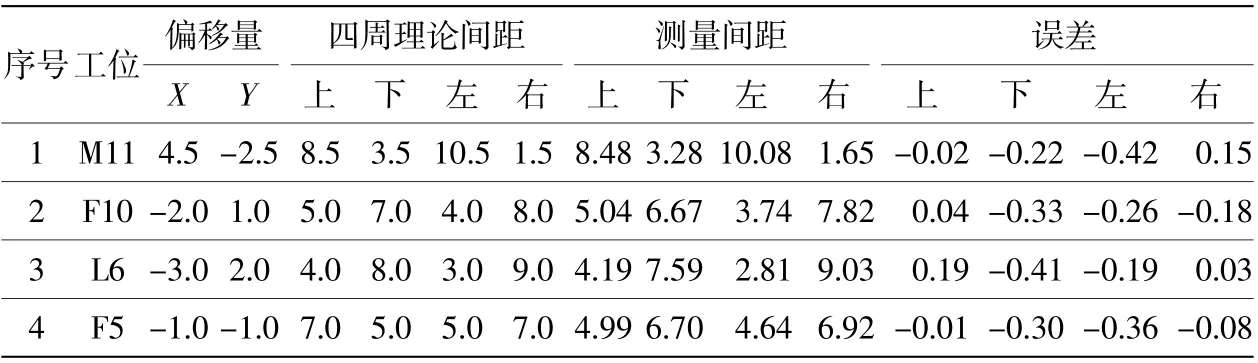
表1 M11、F10、L6、F5工位誤差 mm
3.2 全部組件間距測量結果及分析
除了4 個驗證工位外,其它工位的間距均為設計的模擬平臺標準間距6 mm,測量算法計算出全部工位間距,以第22 步計算為例,結果顯示如圖8 所示。按照單工位4 個間距值編號,共計識別測量628個間距值, 全部工位的測量誤差如圖9 所示。

圖8 第22 步模擬工位測量間距顯示示意圖

圖9 全部工位間距測量誤差
通過全部工位的間距數據分析可以看出,間距誤差在0.42 mm 以內,平均誤差為0.035 mm。全部工位測量間距誤差在允許范圍之內。
3.3 組件高差計算結果及分析
單目攝像機一般無法通過圖像獲取到準確的深度方向值,由于組件表面的S-hole 的間距保持不變,因此可以通過組件表面S-hole 的標準間距,得到攝像機的外部參數,從而計算得出組件相對高差。通過模擬實驗平臺,基于上述已驗證計算模型得到各工位相對高差值分布,如圖10所示。
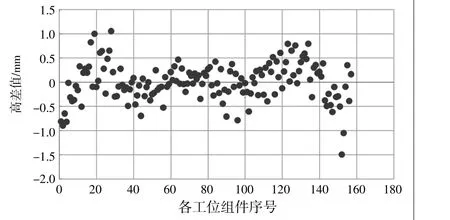
圖10 組件表面相對高度測量值分布
從計算的數據可以看出,157 個工位的組件表面相對高度最大為1.5mm,計算得到的高度值呈馬鞍形分布,且主要集中在-0.5~0.5 mm 區間內,這與實際堆芯模擬圖變形趨勢一致。
4 結 論
本文實現了一種可用于堆芯燃料組件間距和高差測量的單目視覺測量方法。為驗證該測量方法的精度,搭建測試平臺,按照比例繪制模擬堆芯圖。攝像機按照規劃的運動軌跡獲取到模擬堆芯圖片,通過標定求解攝像機內參數、外參數和畸變參數,將校正參數代入攝像機數學模型并對拍攝圖片進行匹配,通過算法求解出相鄰組件上管座間距。間距測量最大誤差在0.5 mm 以內,平均誤差在0.1 mm 以內,驗證了堆芯復查期間通過單目視覺測量燃料組件間距可行性。在已驗證計算模型下進一步計算得出各組件高差值分布,為堆芯安全運行提供定量數據參考。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
