基于BPNN的黃酒前酵溫度控制模型與仿真
2020-11-27 06:56:14蔣美仙王振水吳國興黃蘇西鄭佳美
浙江工業大學學報 2020年6期
蔣美仙,王振水,吳國興,黃蘇西,鄭佳美
(浙江工業大學 機械工程學院,浙江 杭州 310023)
為提高黃酒產量和品質,我國黃酒企業積極引進自動化釀造設備,逐步改進傳統釀造工藝。但針對前發酵過程的溫度控制至今仍沒有切實有效的方法,嚴重制約了黃酒生產的自動化水平及黃酒品質的穩定。近年來國內外學者對啤酒以及工業注塑機的溫度控制方面有相關研究,但鮮有關于黃酒溫度控制的相關研究。杜鋒等[1]運用模糊控制對啤酒發酵進行溫度控制,提出了變論域的模糊PID控制方法;畢競鍇[2]在啤酒發酵過程智能化自動化控制過程中引入了自適應調整的模糊控制;馮絮影[3]對發酵過程進行建模并對溫度控制問題進行研究,提出基于生物發酵過程的建模與控制方法;Kanagalakshmi等[4]基于注塑成型溫度控制的實際需要,提出了一種基于多模態比例積分微分(PID)的實時控制方案;Nath等[5]基于傳統內部模型控制(IMC)方法;李勝等[6]采用先進的模糊控制算法與傳統的PID控制相結合的模糊PID控制策略,將模糊控制的魯棒性好、適應性強以及PID控制可對控制參數進行實時調節等有效地結合起來。
通過文獻分析可知:黃酒前發酵過程的溫度控制主要集中在內部模型構建及控制器參數調整這兩個方面。而黃酒前發酵過程溫度的變化是一個高度非線性的時變過程,難以建立精確的數學模型,即使建立了模糊數學模型,其參數調節也是個難點。因此,針對黃酒前酵過程的溫度控制研究,主要集中在控制器設計方面。當前工業應用較為廣泛的PID控制器具有高精度、快速響應等優點,其參數調節一直是研究的關鍵。筆者將BP神經網絡應用于PID控制器的參數調節,充分發揮BP神經網絡的自學習能力,實現控制參數的自動調整。
1 問題描述
黃酒的前酵過程中由于發酵罐內酵液在酵母菌和酒曲的作用下發生著劇烈的生化反應,會釋放大量的熱量,而每個階段又要保持相對應的溫度以控制發酵反應的強度。
目前,黃酒發酵溫度依靠操作工的經驗進行控制,操作工根據發酵液的溫度、發酵時間和實時溫度等因素決定冷卻水閥門的開度[7]。由于人工操作自身存在著諸多不確定性,使得黃酒質量的穩定性得不到保障[8]。工業生產過程中常采用PID控制器對制造系統中某一變量進行控制,但PID控制器對于不同的受控對象需要花費大量時間進行參數調試,同時PID控制器也存在被控量的超調、穩態響應時間較長的問題[9]。針對黃酒發酵過程的溫度控制,需要控制器進行快速、穩定控制,一旦發酵過程的溫度產生偏差,會嚴重影響酵母菌繁殖,進而影響黃酒品質。
由于發酵罐內外的能量交換導致的溫度變化,以數學函數進行系統辨識難度較大,且不同的發酵時間點、發酵罐容積、配方、外界環境,其數學規律是不同的,所以通過物理學及數學方法尋找控制律是行不通的[10]。通過系統輸出變化量的負反饋調節機制,根據系統實時變化情況,在不需知道系統內部變化規律的情況下進行有效調節。在工業過程中,負反饋調節機制的PID控制器應用較普遍,但需經歷漫長的參數調節過程,對于要求精確且快速的控制過程,控制效果十分有限。
針對PID控制器參數調節問題,筆者通過BP神經網絡對PID控制器進行改進,將比例、積分和微分三個控制部分設置成BP神經網絡的隱含層。各層神經元之間的連接權值相當于原先PID控制器的控制參數,通過BP神經網絡訓練達到調節參數的目的。同時由于BP神經網絡具有計算多輸入、多輸出的特點,可同時對控制對象的多個控制量進行控制。改進后的溫控系統圖如圖1所示。
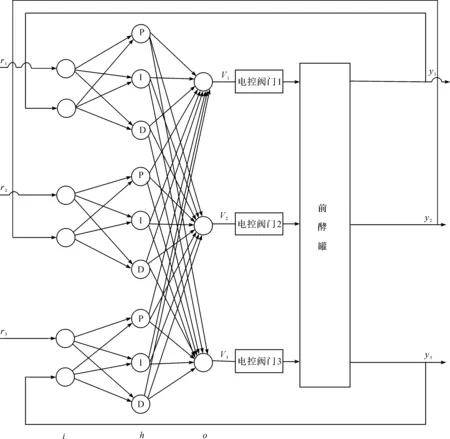
圖1 前酵溫控系統總體設計圖Fig.1 Overall design drawing of the temperature control system of the preleaven
2 基于BPNN的黃酒前酵溫度控制模型構建
神經元網絡通過各神經元之間的加權和形式輸出,只要神經元數量足夠多、網絡結構足夠復雜即可實現對任意變化規律的擬合[11]。并且利用BP神經網絡作為非線性組合函數,可用于多模型的輸出融合[12]。神經元作為神經網絡的處理單元,是神經網絡最基本的組成部分,其模型結構如圖2所示。
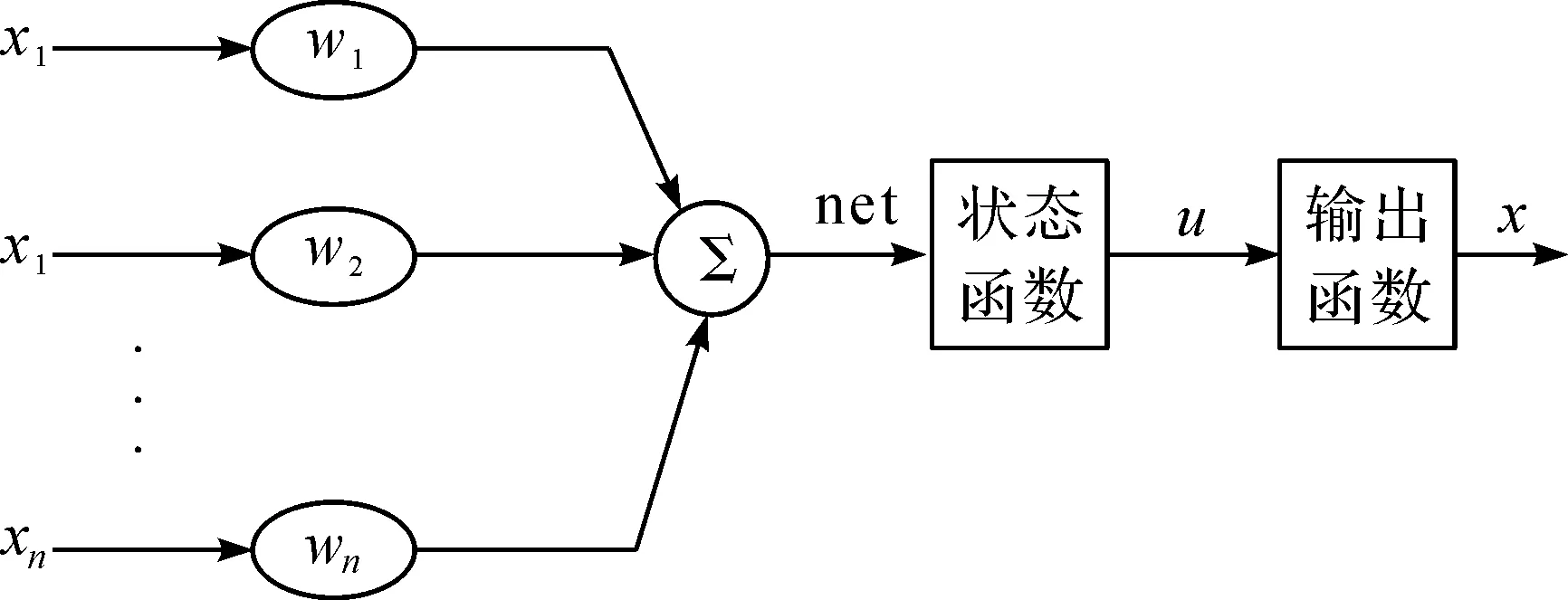
圖2 神經元模型結構框圖Fig.2 Structure block diagram of neuron model
神經元j的狀態uj由此神經元的狀態函數g決定。以神經元當前輸入netj和當前狀態為自變量,按其狀態函數就可產生神經元的下一個狀態。
神經元j的輸出由此神經元的輸出函數f決定。以神經元狀態uj為自變量,按其輸出函數就可產生神經元的輸出值,即
xj(t)=f(uj(t))
(1)
神經元的輸出函數也有多種形式,包括恒等函數、閾值函數、統計函數和S型函數等,筆者采用如下比例閾值函數,其數學表達式為
(2)
在控制系統的設計中,每個分支神經網絡的隱含層從上到下依次劃分為比例層、積分層和微分層。筆者設計的控制系統采用三分支、三輸出的神經網絡,現設神經元的分支序號為s(s=1,2,3)。在每個單獨的分支里輸入層神經元(input)的序號為i(i=1,2,3),隱含層神經元(hidden)的序號為h(h=1,2,3)。輸出層神經元(output)的序號為o(o=1,2,3)。
2.1 輸入層神經元的計算
每個分支神經網絡有兩個輸入層神經元,其輸入分別為系統給定參據量和被控對象前一采樣時刻的輸出量,即r(k)與y(k-1)。根據改進PID控制器的設計原理,其狀態變換函數go[e(k)]=e(k),即對于任意時刻其狀態是不變的,輸入層神經元的狀態可表示為
usi(k)=netsi(k)
(3)
2.2 比例元的計算
設v(t)為控制器的輸出,e(t)為控制器的輸入,kP為比例系數,則有
v(k)=gP[e(k)]=kPe(k)
(4)
比例元為s分支神經網絡隱含層中的第1(h=1)個神經元,有2 個輸入支路與其相連,則在任意k時刻,單元的總輸入為
(5)
式中:xsi(k)為其所在的第s分支神經網絡的2 個與其相連的輸入層神經元的輸出值;wsi1為相應的連接權值。
現統一在隱含層相關變量末尾加上標“′”,在輸出層相關變量末尾加上標“″”。將輸入層至隱含層連接權值當作輸入層相關變量;將隱含層至輸出層連接權值當作隱含層相關變量,其末尾需加上標“′”。該約定適用于全文,后文不再加以贅述。
比例元的狀態函數gp為比例函數,根據改進PID控制器的要求,其比例系數應設置為1。則比例元在任意采樣時刻k的狀態為
(6)
因本文所有神經元是比例閾值函數,比例元的輸入—輸出狀態曲線如圖3所示。
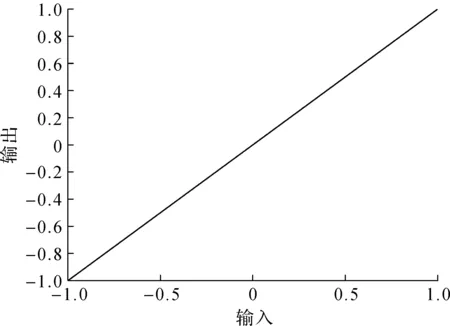
圖3 比例閾值函數輸入—輸出狀態曲線Fig.3 Proportional threshold function input-output state curve
2.3 積分元的計算
設v(t)為積分控制單元的輸出,e(t)為積分控制單元的輸入,TI為積分時間常數,則積分控制部分的表達式為
(7)
式中gI[e(t)]為積分函數。
在實際應用中只要采樣周期足夠小,就可以用累加近似代替積分。在任意采樣時刻k,如果設T為采樣周期,TI為積分時間常數,kI為積分系數,則積分元的計算公式為
(8)
式中gI[e(k),v(k-1)]為積分函數的離散形式。
積分元為s分支神經網絡隱含層的第2 (h=2)個神經元,有兩個輸入支路與其相連,則任意采樣時刻k,單元的總輸入為
(9)
式中:xsi為其所在的第s分支神經網絡的2 個與其相連的輸入層神經元的輸出值,wsi2為相應的連接權值。
積分元的狀態函數gI為積分函數,根據改進PID控制器的要求,其積分系數應設置為1。則積分元在任意采樣時刻k的狀態為
(10)
2.4 微分元的計算
微分控制部分的輸出與輸入信號的變化率成正比,同積分元的計算過程,其在采樣周期足夠小的情況下,可用一階差分代替一階微分。在任意采樣時刻k,如果設T為采樣周期,TD為微分時間常數,kD為微分系數,則微分控制部分的表達式為
(11)
式中gD[e(k),e(k-1)]為微分函數的離散形式。
微分元為s分支神經網絡隱含層的第3 (h=3)個神經元,有2 個輸入支路與其相連,則任意采樣時刻k,單元的總輸入為
(12)
式中:xsi為其所在的第s分支神經網絡的2 個與其相連的輸入層神經元的輸出值;wsi2為相應的連接權值。
積分元的狀態函數gI為積分函數,根據改進PID控制器的要求,其積分系數應設置為1。則積分元在任意采樣時刻k的狀態為
(13)
微分元的輸出函數也和比例、積分元的輸出函數相同,同為比例閾值函數。
2.5 輸出層神經元的計算
該改進控制器是三輸出的,輸出層有三個神經元(給其分別從上到下編號:o=1,2,3),其輸入為所有隱含層神經元的加權和,其輸入為
(14)
其狀轉移函數和輸入層神經元一樣,任意時刻狀態保持不變,則其狀態為
(15)
2.6 連接權值的調整
對于整個控制系統,其控制性能是根據被控量的輸出與系統給定參據量在對應時間序列上的偏差平方均值。由于無法得知被控對象要求的輸入這一變量,如果仍以前者作為目標函數去更新連接權值是行不通的。因此將后者作為目標函數,被控對象內部也相當于神經網絡的一層。為避免數據的偶然性,采用批量學習方式,每批取200 個采樣點的數據,則整個神經網絡的目標函數可表示為
(16)
即按梯度下降法調節神經網絡的連接權值,經n步訓練后,各層權重值迭代方程可表示為
(17)
式中ρ為學習步長。
隱含層至輸出層連接權值調整計算式為
(18)
(19)
可求出
(20)

(21)

(22)
式中sgn為符號函數,用于判斷自變量的正負屬性。
可求出
(23)
綜上所述,可得
(24)
輸入層至隱含層權值調整計算式為
(25)
式中ρ為學習步長。
(26)
可得
(27)
可得
(28)
由隱含層輸出函數的特性可得
(29)
(30)
由輸入輸出關系可得
(31)
(32)
綜上
(33)

3 仿真分析
筆者設計的控制系統為典型的過程控制系統,選用Simulink軟件對其進行仿真分析。Simulink是MathWorks公司開發的一個Matlab數據模型處理工具,其基于控制系統框圖的設計原理,被廣泛用于動態系統的建模與仿真。Simulink軟件內部設計了各種API模塊,可以實現多種信號的產生,信號的放大、過濾、遲延、整合與分流,信號變化的動態展示等多種功能[13]。通過仿真可以更加直觀地比較傳統PID控制器、改進后的PID控制器以及經過BP神經網絡訓練的PID控制器之間的響應速度、精度以及性能等。為了滿足用戶的個性化需求,Simulink軟件還支持開發自定義函數,用戶可根據自己的要求編寫S函數,再將S函數封裝成S函數模塊,即實現了自定義開發API的過程。
根據溫控系統的整體設計的要求,sub子模塊設計如圖4所示,搭建的Simulink仿真系統框圖如圖5所示。
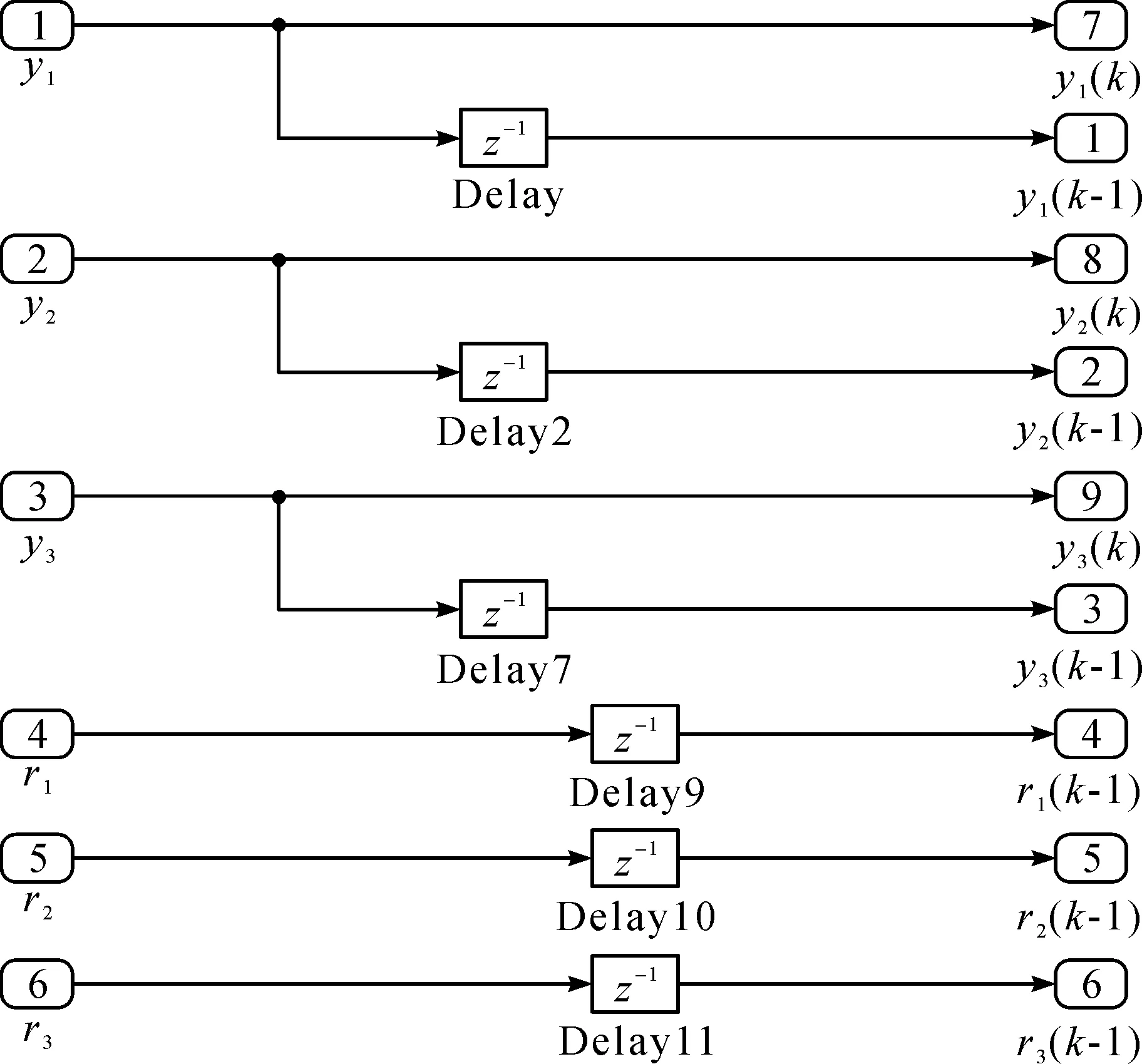
圖4 輸入信號處理子模塊Fig.4 Input signal processing sub-module
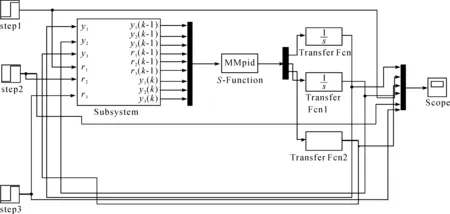
圖5 溫控系統仿真框圖Fig.5 Simulation block diagram of temperature control system
按PID控制器控制規律,輸入S函數的參數kp=0.1,ki=0.2,kd=0.3,實現連接權值初始化。其次設置隱含層至輸出層、輸入層至隱含層的連接權值梯度下降步長:StepLength1=0.01,StepLength2=0.01。最后對求解器的相關參數進行設置,仿真時長為200 s,固定采樣步長SampleTime為0.25 s,將控制器換成傳統PID控制器作為對照組,仿真結果分別如圖6,7所示。
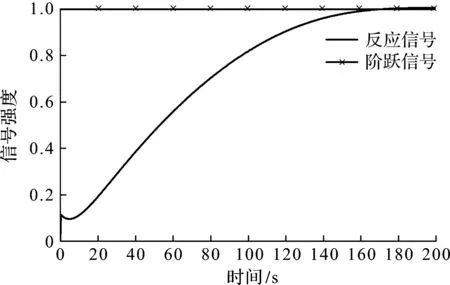
圖6 未經訓練的改進PID控制器的單位階躍響應Fig.6 Unit step response of an untrained modified PID controller
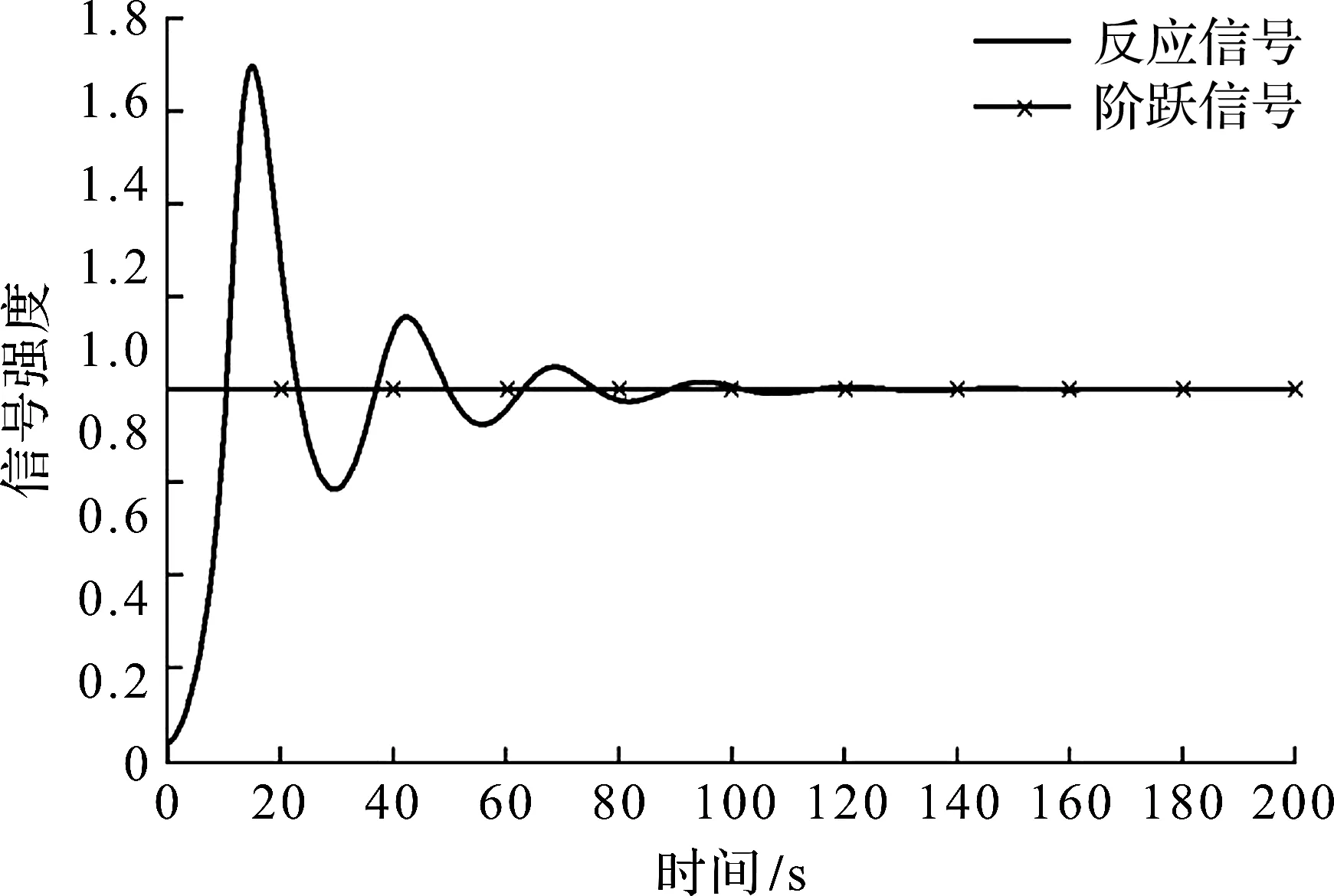
圖7 傳統PID控制器的單位階躍響應Fig.7 Unit step response of traditional PID controller
神經網絡模型設立200 個樣本采樣周期,采用每周期更新一次權值的批量學習法,分別將學習500,1 000 次后的連接權值作為初始權值進行仿真,其結果分別如圖8,9所示。
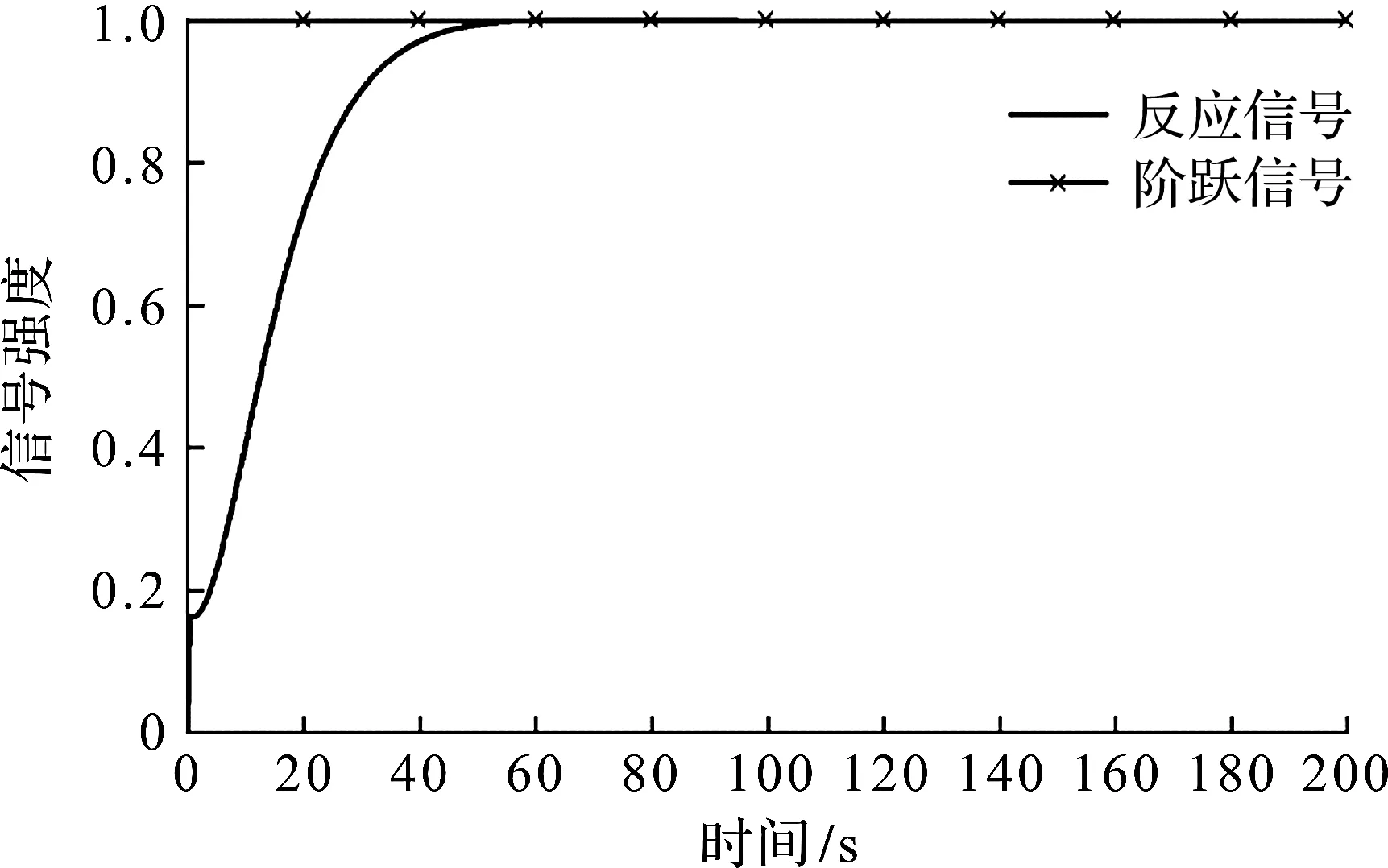
圖8 訓練500 次后的改進PID控制器的單位階躍響應Fig.8 Unit step response of improved PID controller after 500 times of training
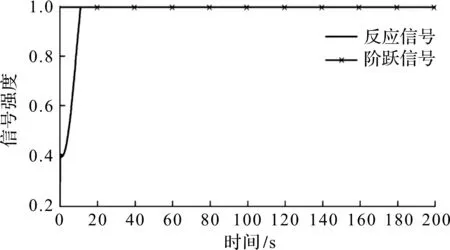
圖9 訓練1 000 次后的改進PID控制器的單位階躍響應Fig.9 Unit step response of improved PID controller after 1 000 times of training
通過對比訓練500,1 000 次的單位階躍響應圖曲線,得出改進的控制器經過訓練次數越多,其對系統給定參據量的響應速度越快,對被控對象的控制效果越佳。
對于一個多變量控制系統,現假設黃酒前酵罐中3 個不同的測溫點,分別給定不同的系統參數,研究改進控制器對多個被控對象的控制性能。3 個被控對象的系統參數,分別設定為單位階躍、4/5單位階躍及2/5單位階躍,其響應如圖10所示。由圖10可知:3 個被控量均達到了穩態響應,因此改進后的PID控制器對多變量系統具有良好的控制效果。
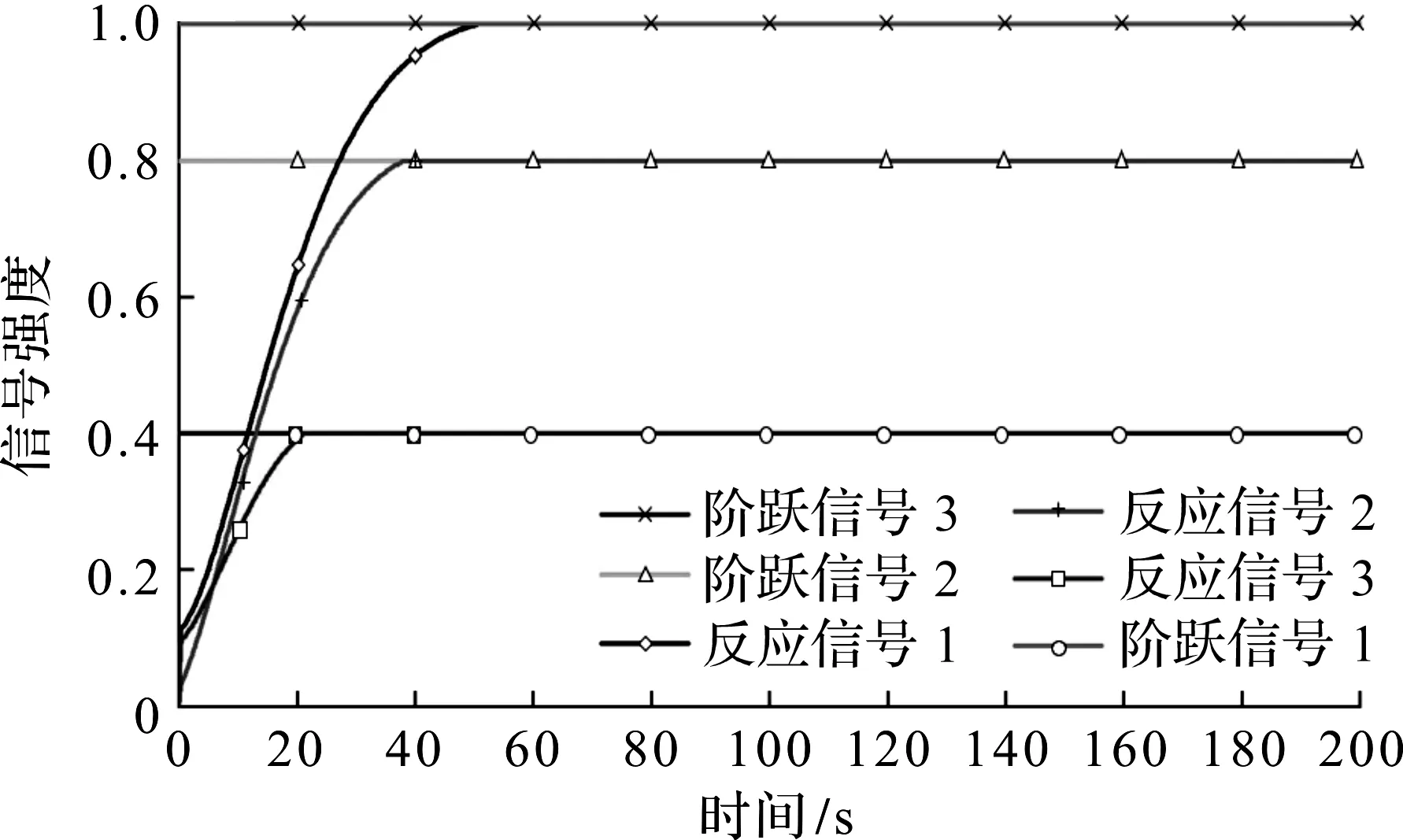
圖10 改進PID控制器對多變量的階躍響應Fig.10 Step response of improved PID controller to multivariable
4 結 論
鑒于黃酒前酵過程發酵液的溫度具有強耦合、時滯性和區域差異性等復雜特性,難以建立精確的內部數學模型,而傳統的控制方法難以達到理想的控制效果,故將BP神經網絡應用于PID控制器的參數調節過程,對PID控制器進行了改進設計,將PID控制器的比例、積分和微分3 個控制部分分別作為神經網絡的3 個隱含層節點,通過神經網絡的連接權值調整實現了參數的自動調節。通過Simulink
軟件進行仿真,結果表明在經歷多次訓練后,改進后的控制器擁有更高的精度和更良好的性能,且隨著訓練次數的增加,控制器的精度和性能也得到明顯提高。
