基于低軌稀疏星座的藍綠激光對潛定位研究
2020-11-30 07:24:42徐偉證康國華劉佳露張雷劉宗強
中國空間科學技術 2020年5期
徐偉證,康國華,*,劉佳露,張雷,劉宗強
1. 南京航空航天大學 航天學院,南京 210016 2. 西安衛星測控中心,西安 710043
潛艇具有隱蔽性強、高效打擊和長時續航的優勢,是國家現代化軍事力量的重要組成部分。由于潛艇特殊的工作環境,其在信息傳輸和導航定位方面都存在較多問題[1]。特別是潛艇定位,由于電磁波信號穿透海水的能力極差,潛艇在水下不能使用全球衛星導航系統(global navigation satellite system,GNSS)進行定位,因此一直未有高精度定位方案,亟需有效的解決方案[2]。藍綠激光方向性好,工作頻率高,通信頻帶寬,數據傳輸能力強,且衰減系數低,其水下平均衰減率只有甚低頻的1/15,超低頻的2/3,可以與深達幾百米下的潛艇進行通信[3-4]。水下藍綠激光通信應用潛力巨大,世界各國都極為重視,目前機載、臨近空間和星載藍綠激光對潛艇通信均已經得到實際驗證,取得良好的效果。其中基于低軌衛星的藍綠激光星潛雙向通信完全可行,也是現階段實現藍綠激光對潛通信的最優方案[5-8]。
信號光可以作為數據傳輸的載體,傳輸的數據是經過編碼的數據流,可在接收端通過譯碼恢復原始數據[9]。激光雙向通信單程測距方案,采用偽隨機碼作為測距碼,通過對發射時的本地時鐘信號和接收后恢復的時鐘信號進行相位比對,實現激光測距[9-15],因此激光通信的同時進行測距具有了基礎。在衛星導航定位方面,利用中國北斗3顆地球同步軌道衛星與高度表可實現三星無源定位,驗證了“多星偽距+高度表”定位的可行性[10-11]。近年來也有學者研究地面終端通過多次接收單顆衛星實現定位的方式,仿真表明單顆低軌衛星連續觀測下定位精度約500 m[12-13]。
本文將上述研究結合起來,在激光通信測距一體化以及三星無源定位和單星多普勒定位的技術基礎上,針對潛艇水下定位需求,提出采用藍綠激光的低軌稀疏星座定位方案。
1 低軌稀疏星座定位原理
1.1 低軌稀疏星座定位方案
低軌衛星對潛艇通信測距如圖1所示,潛艇根據低軌星座的星歷預測衛星過頂的時間窗口,并預先在相應區域準備建立激光通信測距鏈路。低軌衛星以藍綠激光光束作為載波,應用碼元相位同步測距體制,將導航電文數據及測距標識編碼進行調制和播發。潛艇接收激光信號后,通過解調獲取低軌衛星激光終端的測距標識時刻,并對潛艇自身發射編碼器的相位進行采樣,從而提取測距值,獲得衛星和潛艇間的距離。假定星座過境期間潛艇保持水下靜止,經過一定時間間隔完成至少2次通信測距,聯合2組觀測數據與潛艇自身高程測量信息進行定位解算,實現基于星潛定位算法實現潛艇的水下定位[6-8,14-15]。
1.2 激光通信測距
激光通信測距一體化技術以激光光束為載體,將測距和通信信息共用同一束激光和硬件平臺,同步完成通信和測距雙重功能[9,15]。傳統激光測距是通過激光發射器將序列碼進行相位調制后發往被測目標,捕獲目標反射回來的激光信號并解調恢復出序列,比對相位序列以確定相位時延差,進而確定激光往返時間間隔來實現測距[15]。考慮到低軌稀疏星座的過境窗口、潛艇的隱蔽性和水下工作環境需求,本文采用雙向單程測距體制來實現潛艇偽距測量。其中雙向單程測距體制如圖 2所示[15]。
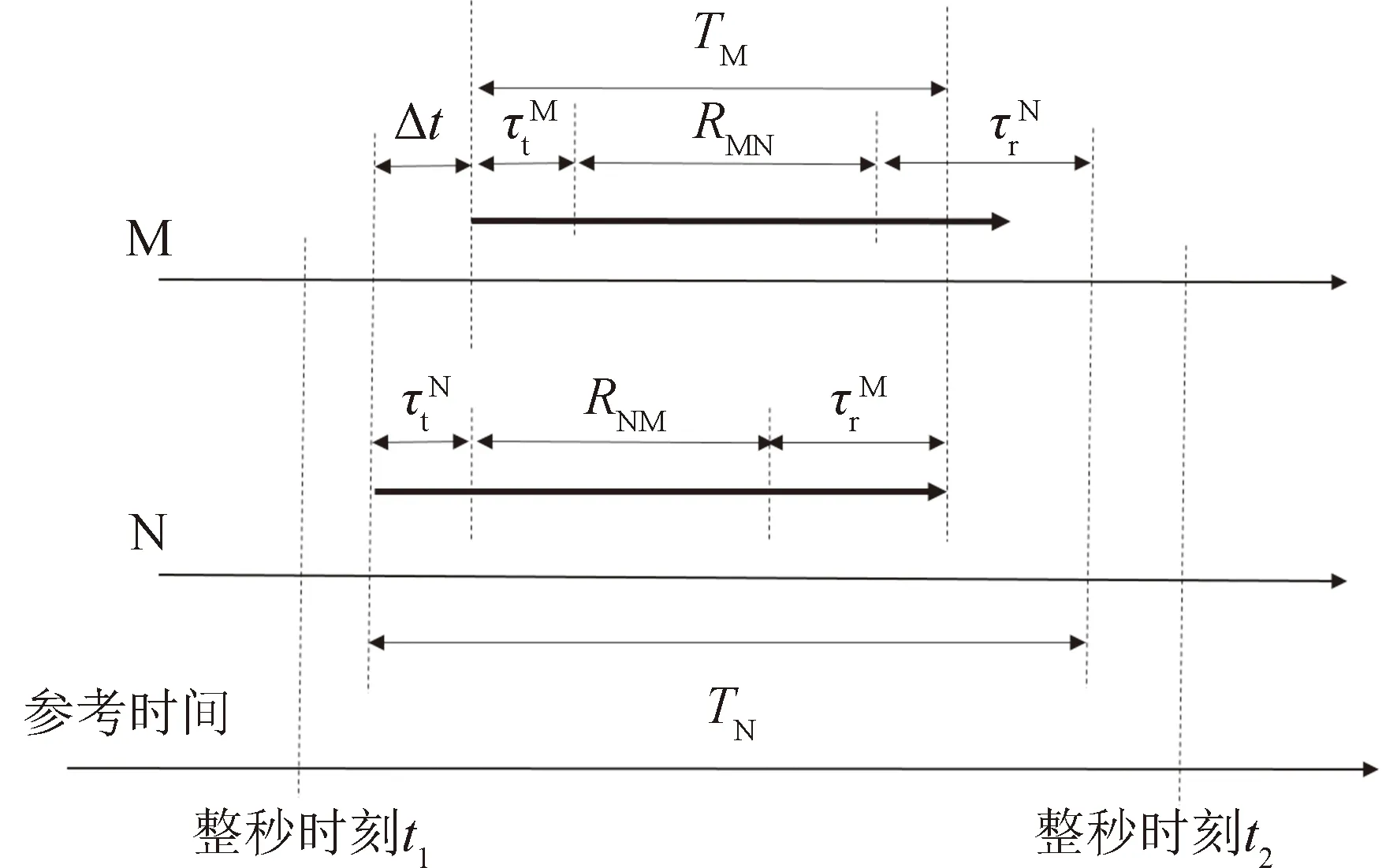
圖2 雙向單程測距原理Fig.2 Schematic diagram of dual one-way ranging
M,N表征了潛艇和衛星兩個測距對象,RNM,RMN為測距對象即衛星和潛艇的距離,衛星與潛艇間存在時差Δt,激光通信均存在發送時延τt、接收時延τr,若時差滿足[15]:

(1)
實際計時信息可以表示為[15]:
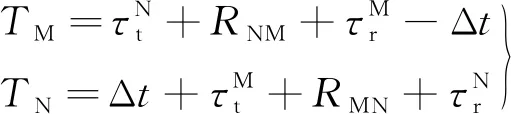
(2)
衛星和潛艇間距離為:

(3)
式中:c為光速。
在單程測距體制基礎上,采用碼元相位同步測距,其工作機制如圖3所示,低軌衛星激光發射器基于星鐘倍頻產生工作時鐘,在同步脈沖時刻,由測距編碼模塊產生基帶數據,調制后作為測距標識,數據幀插入“計時”信息。潛艇接收激光信號并進行采樣、碼同步、幀同步等處理,解調出測距標識,并在數字控制振蕩器(numerically controlled oscillator,NCO)時標模塊比對,完成高精度“計時”,進而結合本地“計時”信息計算測距值[15]。
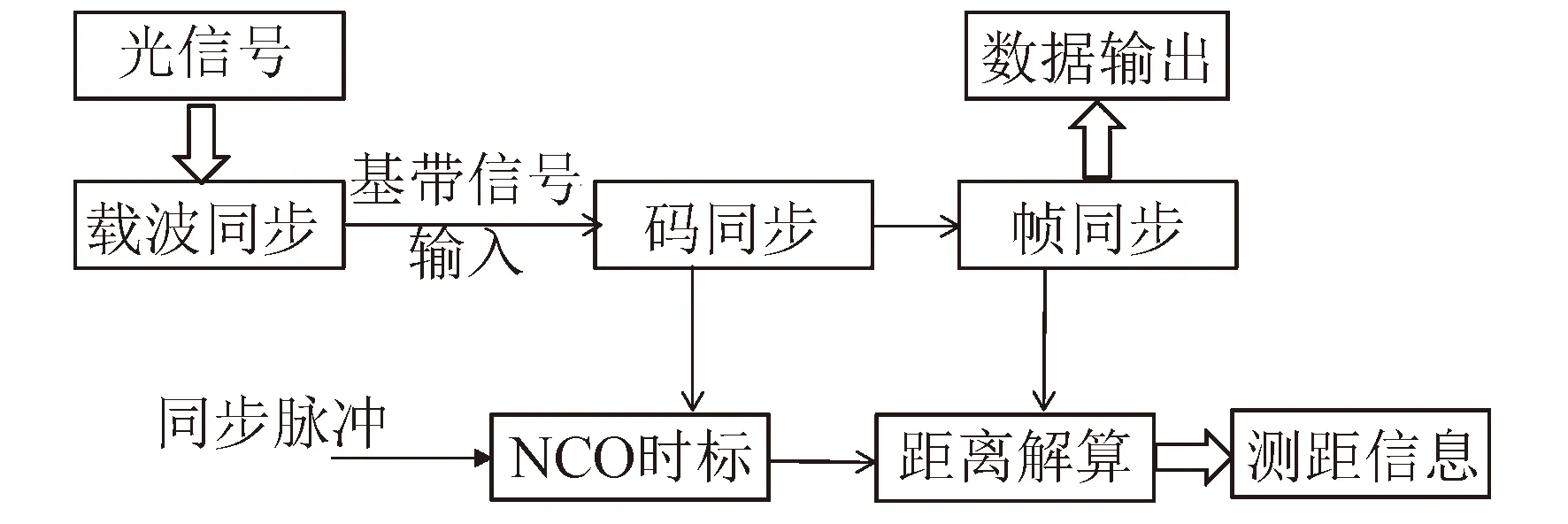
圖3 數據位同步測距原理Fig.3 Responsive ranging working mechanism
1.3 低軌星座定位算法
北斗三星無源定位是依靠3顆地球同步軌道衛星的偽距測量值和高程測量值構建4個觀測方程,求解用戶位置和偽距鐘差[14,17]。考慮到低軌衛星軌道高度低,3顆衛星位置關系相近,幾何構型較差,在進行定位解算時觀測值相關性較強,無法實現最小二乘定位解算。單星多普勒定位通過累積一定時間多個歷元的量測數據進行定位,反映了定位目標和衛星間距離變化率。
綜合考慮三星無源定位和單星多普勒定位原理,不失合理性,假定潛艇位置靜止在水下某一點,低軌星座過境期間多次采集觀測數據,且認為該時間段內衛星時鐘穩定,從而獲取多組觀測值來參與幾何位置解算。星座過境通信測距原理如圖 4所示,t1時潛艇與低軌星座進行通信測距獲得3個偽距測量值ρt1,i(i=1,2,3),經過時間間隔Δt,到t2時刻再次接收數據獲取偽距測量值ρt2,i(i=1,2,3)。依靠低軌星座的星歷數據即可獲得測量時刻的衛星精確位置坐標(xi,yi,zi)(i=1,2,3),并通過潛艇的高程測量計可獲得高程測量值H,與t1、t2時刻兩組偽距測量值構成7個觀測方程,解算潛艇位置(xu,yu,zu)和鐘差,通過最小二乘和牛頓迭代法反復運算,從而實現潛艇的快速實時導航定位。
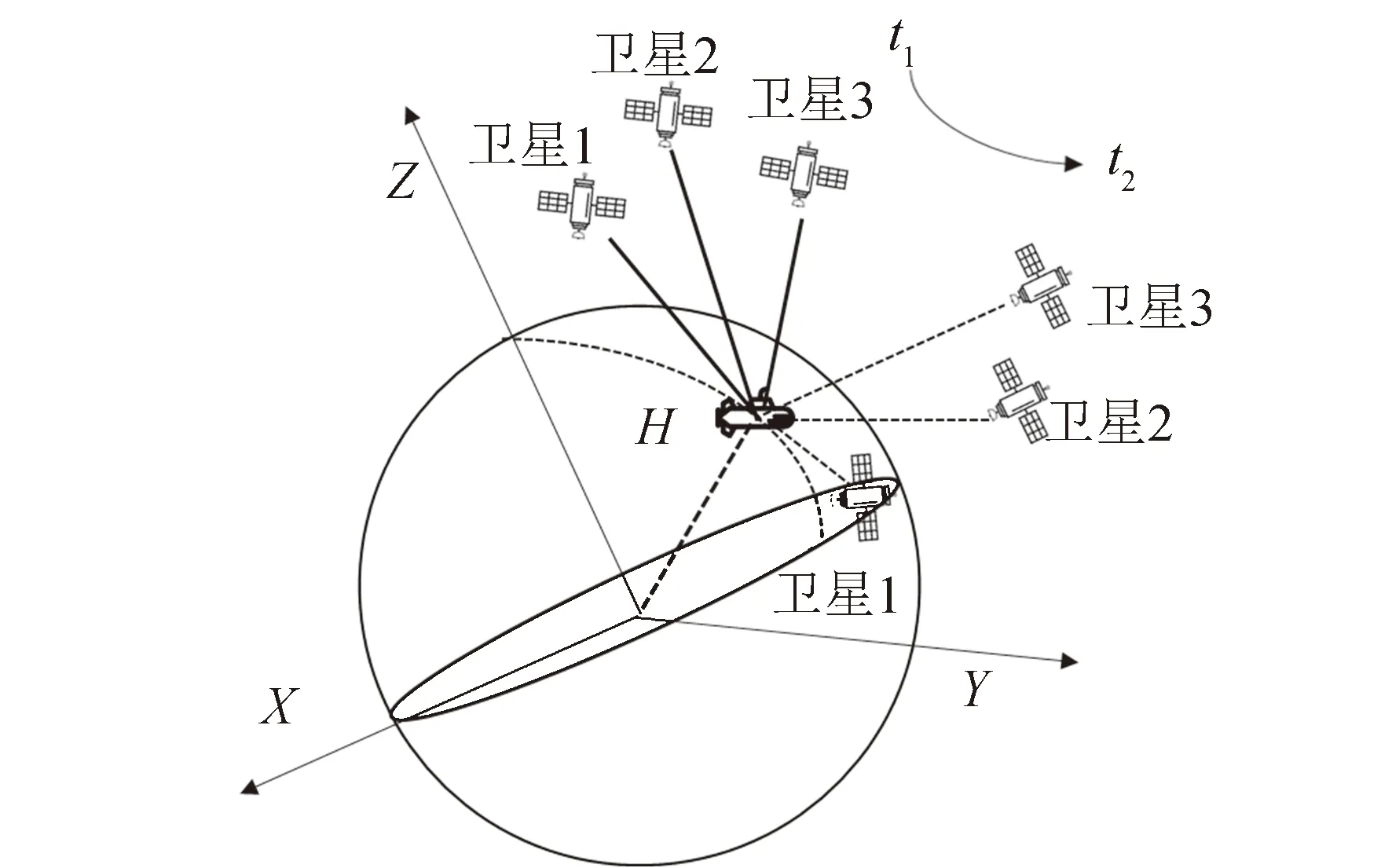
圖4 低軌星座與潛艇通信測距原理Fig.4 LEO constellation and submarine communication ranging principle diagram
潛艇與低軌星座通信過程中,假定潛艇位置在2次通信間隔內保持不變,隨著星座過境過程,其測得的量測值可表示為[19]:

(4)
式中: (xt,i,yt,i,zt,i)(t=t1,t2,i=1,2,3)為3顆衛星在t1,t2時刻ECEF坐標系下位置坐標;δtu為潛艇與衛星間等效鐘差距離;Re為地球半徑;f為地球偏心率;εi為偽距測量過程中激光在空氣、水下傳播、測量間隔期間的組合誤差;ε為高程測量誤差。通過7個觀測方程對4個待估計量,包括xu、yu、zu、δtu,進行迭代求解。在牛頓迭代解算過程中,需要將方程組(4)中的非線性方程在[Xk-1,δtu,k-1]T處進行線性化,其中對方程中待估參數的偏導數矩陣G和偏差輸出量矩陣b如下所示:

根據當前觀測值數據計算出G和b后,可利用最小二乘法求解位置改正量ΔXu和激光接收機鐘差改正量δtu:
[ΔXu,Δδtu]=(GTG)-1GTb
(5)
并利用位置改正量和接收機鐘差改正量修正位置和接收機鐘差估計值:
(6)
如果修正量滿足一定精度要求或迭代次數達到迭代上限,則獲得潛艇坐標Xu=[xu,yu,zu]和激光接收機鐘差δtu。

高斯分布時定位誤差標準差σpos與空間位置精度因子PDOP、用戶等效距離誤差標準差σUERE的關系為:
σpos=PDOP×σUERE
(7)
PDOP反映星潛幾何關系對定位誤差的影響,在相對測量誤差下,星座的幾何分布對用戶定位誤差的放大量。
2 低軌稀疏星座分析與優化
2.1 低軌稀疏星座覆蓋性分析
低軌稀疏星座的幾何構型直接關系到星座覆蓋范圍,以低傾角星座為例,其主要服務區域的覆蓋情況如圖 5所示。星座過境期間潛艇在服務區域可同時與1~3顆衛星進行通信和測距,實現信息傳輸和導航定位解算。低軌衛星運動速度快,星座過境時間短,需要潛艇根據星座星歷預測衛星過境時間窗口,或采用主動取報方式建立通信聯系,在短時間內完成多次通信測距服務[18-19]。低軌稀疏星座可以實現對服務區域的短時間重訪,通過分不同組合優化設計低軌星座幾何構型,可以實現對潛艇信息傳輸和導航定位的最優服務。
圖5 低軌星座對服務區域的覆蓋情況Fig.5 LEO constellation coverage of service areas
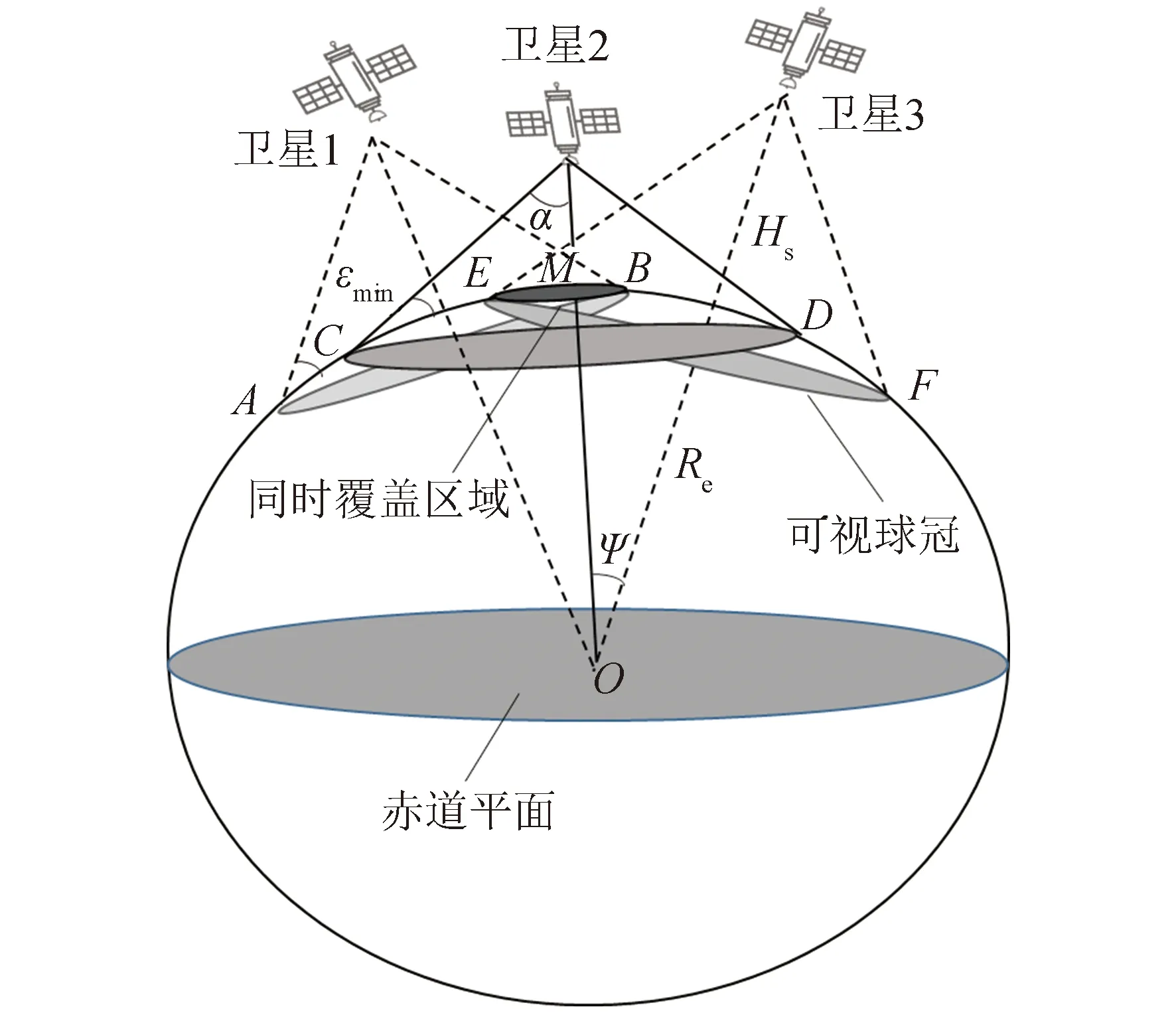
圖6 低軌星座覆蓋性分析Fig.6 LEO constellation coverage analysis
低軌星座對于潛艇的覆蓋情況如圖 6所示,設地心O,3顆低軌衛星覆蓋面可視球冠分別為AB,CD,EF,3顆衛星的共同覆蓋區域為M,該區域內可同時接收3顆衛星通信信號,獲取偽距觀測量,為潛艇定位的最佳區域。假設衛星激光發射器最大半張角α,可實現對星下一定區域的覆蓋。單星的覆蓋范圍取決于激光發射器最大半張角α,對應衛星覆蓋的圓心角Ψ。該圓心角ψ受軌道高度Hs和最小地面仰角εmin約束,計算如下[20]:
(8)
本文考慮地面最小通信仰角εmin為10°[7-8],則可根據衛星軌道高度確定單顆衛星的覆蓋范圍,進而設計低軌稀疏星座構型,完成對主要服務對象的最佳覆蓋。
2.2 低軌稀疏星座參數優化
本文主要以一帶一路海域為服務對象,特別是中國東海、南海區域,對低軌稀疏星座的軌道高度、軌道傾角、覆蓋范圍和重訪時間等提出了約束條件。
以地面主要服務區域的緯度范圍為約束,設計低軌衛星軌道傾角在15°~25°間。激光通信測距會在海面產生光斑,從潛艇隱蔽性考慮,衛星軌道高度不宜太低,以免暴露潛艇的工作區間。結合星座的壽命及空間環境影響,軌道高度宜選擇在800~1 000 km。低軌衛星導航定位對星座的幾何構型要求較高,容易出現偽距觀測量相關性較強而無法進行最小二乘解算的情況。本文通過約束3顆衛星的升交點赤經(right ascension of ascending node,RAAN)和真近點角,使得低軌稀疏星座近似為等邊三角形,以期獲得較優的星座構型。
針對主要服務區域的覆蓋性和定位需求,為探討星座構型對定位性能影響的規律,本文組合設計低軌稀疏星座的軌道高度、軌道傾角與升交點赤經和真近點角,共組成27種不同星座進行仿真分析。星座參數方案如表 1所示。

表1 低軌稀疏星座參數設計方案
2.3 低軌稀疏星座定位性能
本文將27種低軌稀疏星座組合依照控制變量法,依次按照不同軌道高度、軌道傾角、升交點赤經分成9組,每組3種星座,來分析星座參數對定位結果的影響。設計定位目標點[15°(N),115°(E),-100 m]在中國南海區域,數據選取偽距觀測值采樣間隔1 min,誤差超過500 m視為無效定位,置零處理。時鐘誤差作為待估參數,潛艇等效測距誤差包括低軌衛星定軌精度,激光在空氣、水下傳播誤差等,設為方差為36 m2,均值為零的高斯分布[17-18]。從仿真場景中獲取衛星精密星歷、覆蓋情況、目標點定位真值等數據,驗證低軌稀疏星座對潛艇的定位算法,分析低軌星座軌道高度、軌道傾角、升交點赤經對定位結果的影響。對比結果如圖7~圖9所示,分析可知:
1)由圖 7可見,在軌道高度800~1 000 km區間,多數低軌稀疏星座組合中不同軌道高度對潛艇定位誤差影響不大,僅在軌道傾角15°,升交點赤經差值序列為10°時有一定差異,說明軌道傾角、升交點赤經和真近點角確定后,軌道高度小范圍變化對定位結果影響不大。
2)由圖 8可見,軌道傾角15°的星座組合最終定位誤差明顯偏大,軌道傾角20°和軌道傾角25°定位誤差相近,但軌道傾角25°時存在仿真采樣間隔(1 min)內無法實現有效定位的情況,需要延長采樣間隔才能滿足定位需求。
3)由圖 9可見,在軌道高度、軌道傾角、真近點角均保持一致,僅對比不同升交點赤經等差序列,9組星座組合對比均顯示升交點赤經等差序列為20°時,定位結果誤差相對較小。
通過對27種組合星座的仿真設計和定位誤差分組對比分析,確定軌道高度800~1 000 km,軌道傾角15~25°范圍內,星座參數變化對定位誤差影響趨勢較明顯,但不同星座最終定位誤差差值范圍較小,絕大部分差值在10 m內,少數在30~40 m間。其中軌道高度900 km,軌道傾角20°,升交點赤經分別為0°,20°和40°,真近點角分別為0°,5°和330°的稀疏星座,對潛艇定位性能較好。
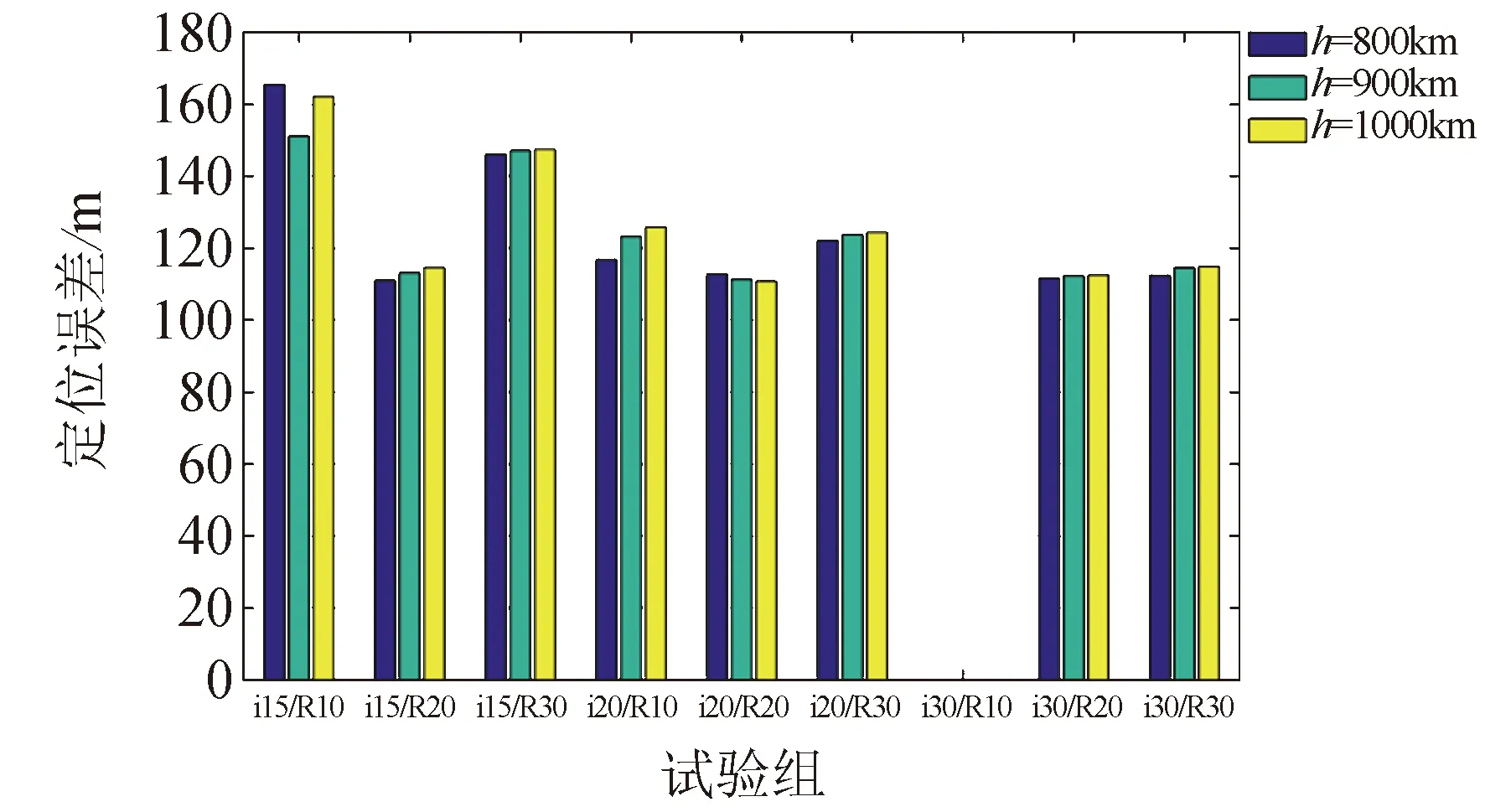
圖7 軌道高度對定位誤差的影響 (i15/R10:軌道傾角15°,升交點赤經等差序列10°)Fig.7 Influence of orbital height on positioning error (i15/R10: the orbital inclination is 15°, the equal difference of RAAN is 10°)
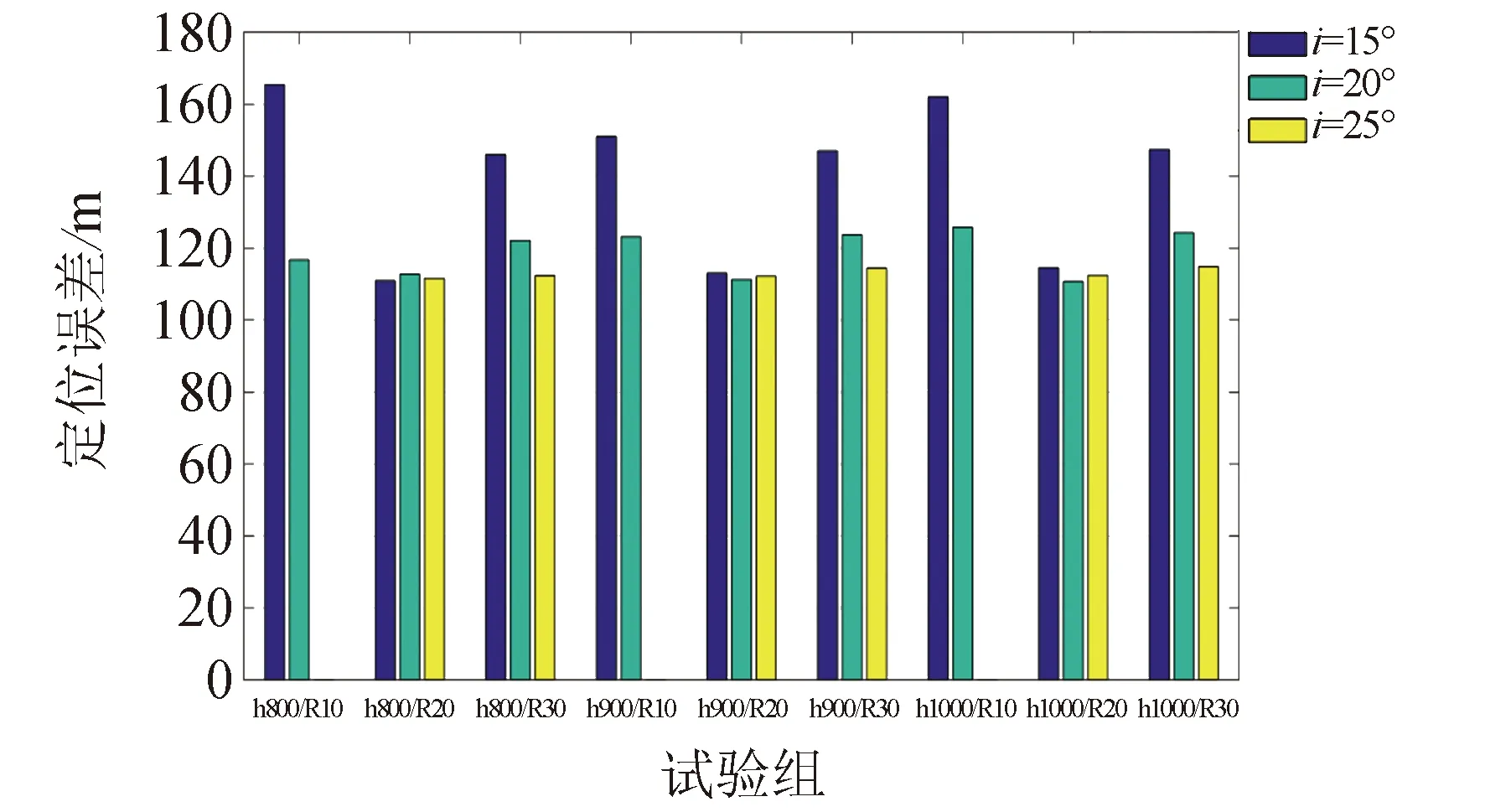
圖8 軌道傾角對定位誤差的影響 (h800/R10:軌道高度800 km,升交點赤經等差序列10°)Fig.8 Influence of orbital inclination on positioning error (h800/R10:the orbital height is 800 km, the equal difference of RAAN is 10°)
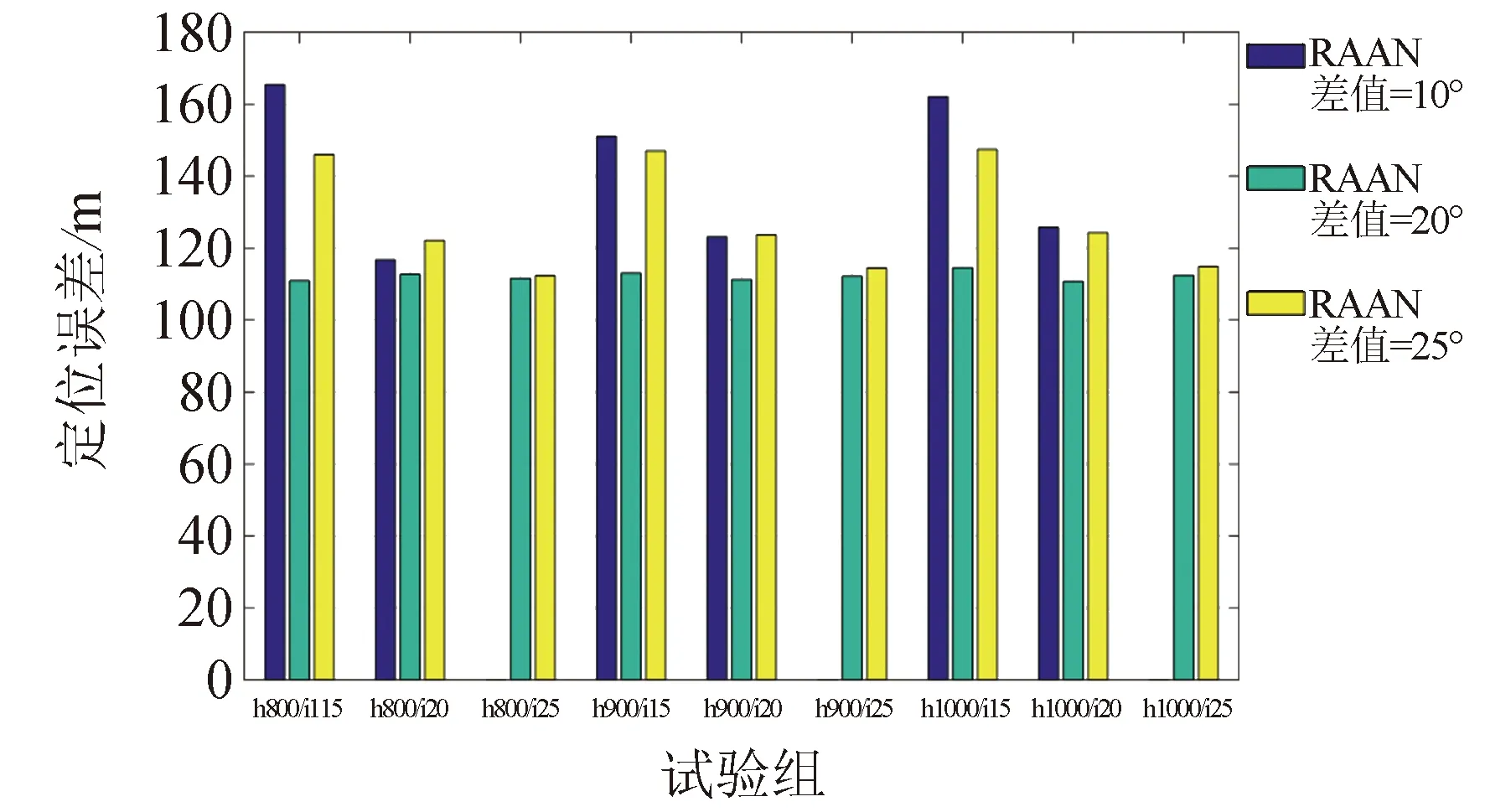
圖9 升交點赤經等差序列對定位誤差的影響 (h800/i15:軌道高度800 km,軌道傾角15°)Fig.9 Influence of the equal differences of RAAN on positioning error (h800/i15: the orbital height is 800 km, the orbital inclination is 15°)
3 算法應用仿真分析
低軌稀疏星座的對地覆蓋情況,特別是對主要服務區域的覆蓋完好性、每日服務時長、服務期間定位精度變化和最優定位方案,是星座定位可靠性、完好性的重要指標。本文以水下潛艇為主要服務對象,針對軌道高度900 km,軌道傾角20°,升交點赤經分別為0°、20°和40°,真近點角分別為0°,5°和330°的低軌稀疏星座做進一步仿真分析。
低軌稀疏星座連續運行24 h對地球的覆蓋情況如圖 10所示,星座長期運行情況下,可以實現對南北緯30°區域的全覆蓋。較大的覆蓋區域有利于避免敵方通過監測星座的運行軌跡來偵察潛艇位置,更有利于提升潛艇的隱蔽性。單個周期內地面覆蓋區域如圖 11所示,針對主要服務區域[10°~30°(N),60°~180°(E)],即一帶一路國家海域及中國東南海域可以實現完全覆蓋。
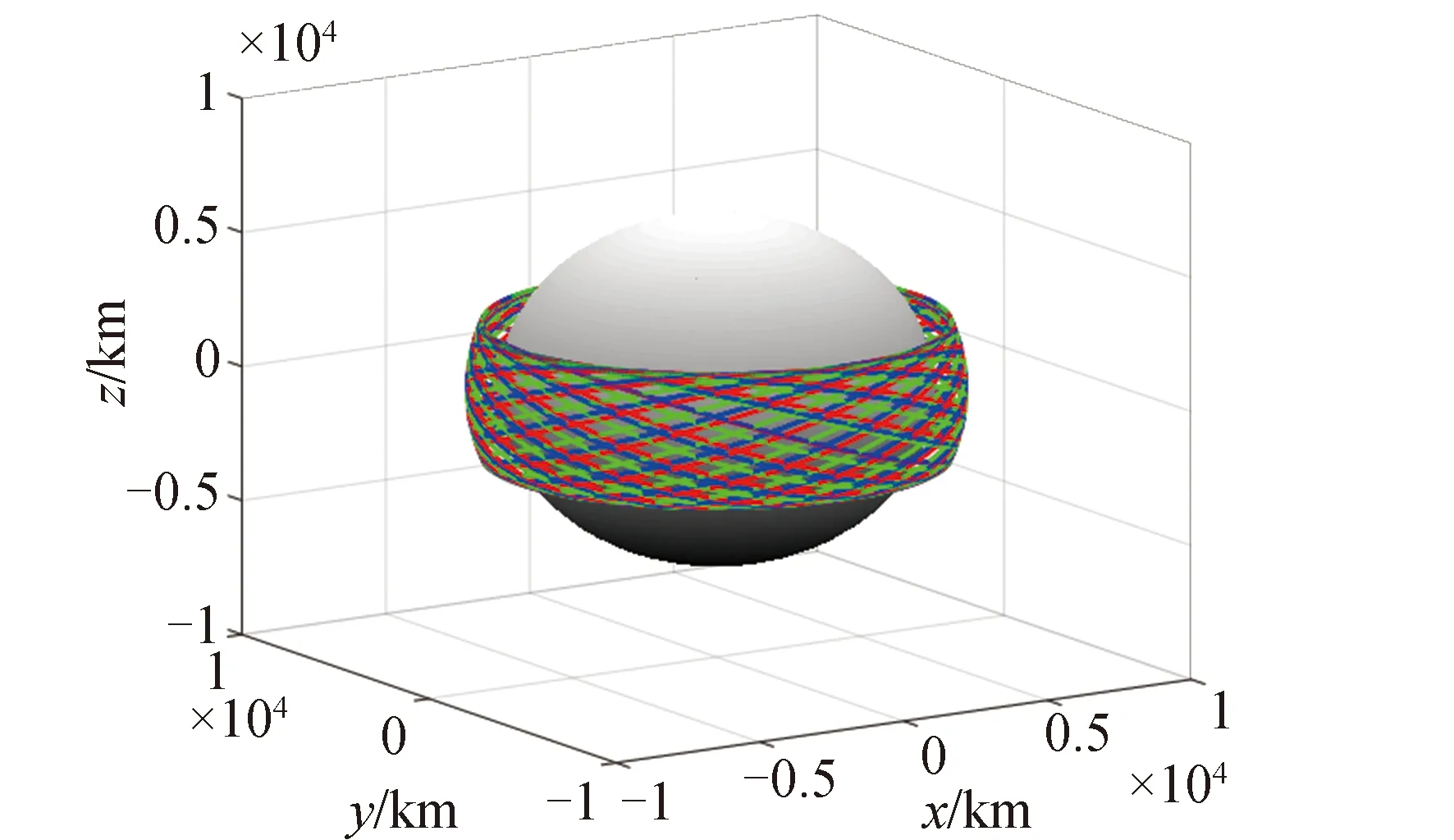
圖10 低軌稀疏星座24 h運行軌跡Fig.10 LEO constellation orbit of 24hours
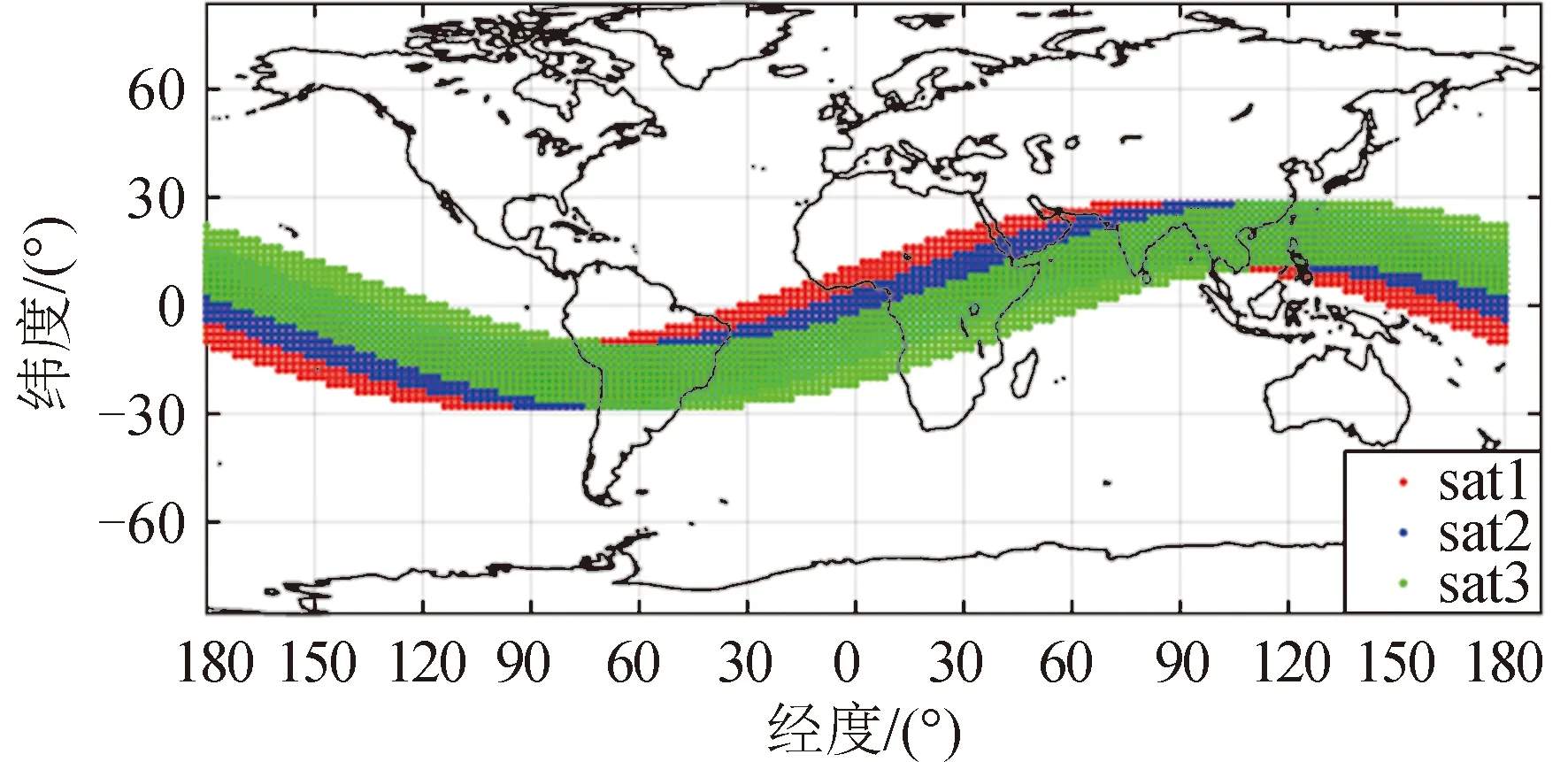
圖11 低軌稀疏星座一個周期覆蓋區域Fig.11 LEO sparse constellation coverage area
低軌稀疏星座在每天不同時間段,對目標區域的覆蓋情況如圖 12所示,星座每日過境時間段不同,每日平均覆蓋時長約4.6 h,3顆衛星同時覆蓋約1.15 h,潛艇在服務區域內可根據星歷計算滿足定位需求的最優時間段。
低軌稀疏星座過境期間,潛艇可同時與1~3顆衛星進行通信測距,獲取偽距觀測值,且通信測距采樣間隔,將影響衛星與潛艇的幾何構型,進而影響定位精度。本文針對仿真目標點為[15°(N),115°(E),-100 m],對低軌星座一次過境全部時段和三顆衛星同時觀測時段進行分析。低軌星座從首顆衛星可見到全部過境期間,設偽距觀測值采樣間隔設為60 s,星座與仿真目標點的PDOP變化情況如圖 13所示。變化趨勢呈現“倒U型”,星座漸入和漸出段PDOP值變化較大,在5~50之間,定位效果較差,最低段保持在1.5~2.3區間,約持續3~4 min。因此星座過境期間,3顆衛星同時觀測時段定位效果最佳。

圖12 服務區域每日不同時間覆蓋情況Fig.12 Service area coverage at different times of the day
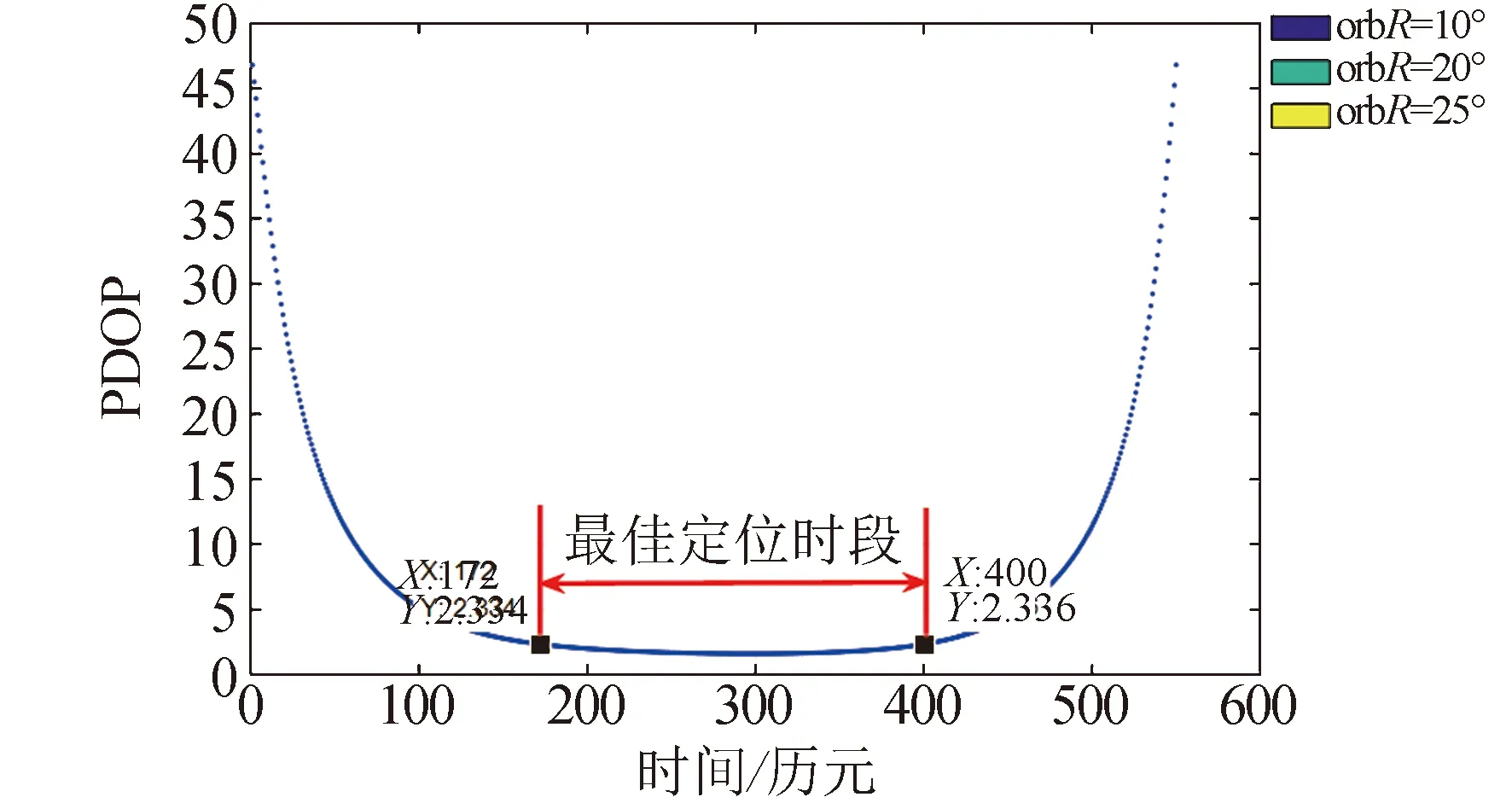
圖13星座單次過境期間PDOP變化趨勢Fig.13 PDOP changes during constellation single transit
3顆衛星同時過境期間,采樣間隔從1~250 s遞增,潛艇整體定位精度和PDOP變化情況如圖 14所示。隨著潛艇通信測距采樣間隔遞增,PDOP逐漸減小,最終定位誤差整體呈現遞減趨勢。圖15表示相同條件下,XY平面和Z方向定位誤差的變化趨勢。隨著觀測值采樣間隔遞增,XY平面誤差相對實現大幅度降低,Z方向誤差整體影響不大。進一步說明,基于低軌衛星快速運動的特性,增大通信測距采樣間隔可以改善星座和潛艇的幾何分布,降低PDOP進而提升定位精度。因此潛艇可通過與低軌星座連續多次進行通信測距,采用間隔較大的數據進行定位解算。
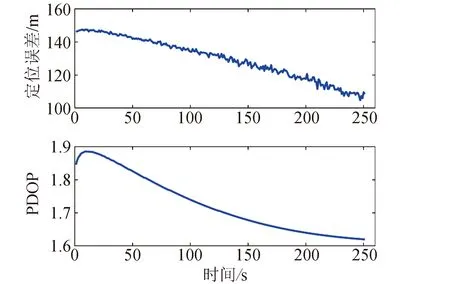
圖14 不同采樣間隔對整體定位精度和PDOP的影響Fig. 14 Influence of different sampling intervals on overall positioning accuracy and PDOP
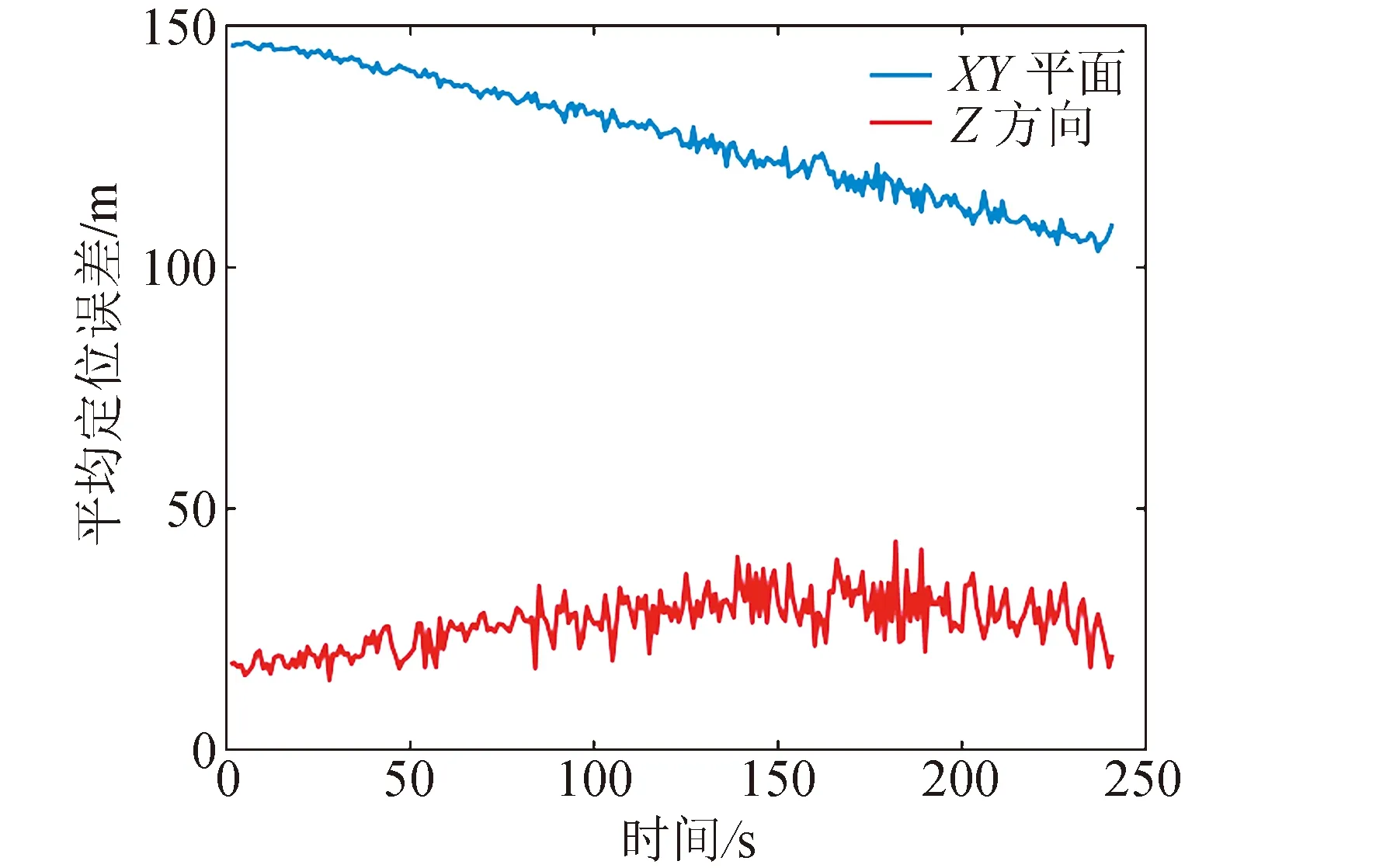
圖15 不同采樣間隔對XY平面和Z方向定位 精度的影響Fig.15 Influence of different sampling intervals on XY plane and Z direction positioning accuracy
4 結束語
在激光通信測距一體化系統和低軌衛星導航增強精密定軌的研究基礎上,本文設計了3顆衛星組成的低軌稀疏星座,利用藍綠激光實現對潛艇同步完成通信測距,聯合高程測量信息實現潛艇水下定位。本文理論分析和仿真驗證表明:
1)27種低軌星座的仿真結果表明,軌道構型在一定范圍內,最終定位誤差將在優于150 m范圍,且不同構型差異不大。確認軌道高度900~1 000 km,軌道傾角20°,升交點赤經分別為0°、20°、40°的低軌稀疏星座,具有相對較優的定位效果。
2)聯合低軌星座和高程測量信息的水下定位結果顯示,3顆衛星可同時觀測階段定位效果最好,每次可持續約3~4 min,且同時觀測時段內采樣間隔越長定位精度越高。考慮衛星定軌精度,激光在空氣、水下傳播以及高程測量誤差,可實現X、Z方向定位誤差優于100 m,Y方向優于150 m。
3)低軌稀疏星座對潛艇導航定位服務性能與星座構型參數、偽距觀測值采樣間隔、星潛定位幾何構型等有關。以我國東南海域為主要服務對象,低軌星座每天過境服務時間約4.6 h,且不同時段覆蓋效果不同,潛艇可依據星座星歷預測最優過境時間窗口和覆蓋區域,從而提升星潛導航定位服務時長和質量。