一種IGSO衛(wèi)星軌道維持時(shí)的偏航角調(diào)整策略
2020-12-01 02:33:14崔振季業(yè)劉偉杰王春元馮佳佳
中國(guó)空間科學(xué)技術(shù) 2020年4期
關(guān)鍵詞:區(qū)域
崔振,季業(yè),劉偉杰,王春元,馮佳佳
1. 北京控制工程研究所,北京 100094 2. 空間智能控制技術(shù)重點(diǎn)實(shí)驗(yàn)室,北京 100094
傾斜地球同步軌道(inclined geo-synchronous orbit,IGSO)衛(wèi)星為保持太陽(yáng)對(duì)單自由度翼板的垂直入射和天線的對(duì)地指向,采取了動(dòng)態(tài)偏航模式。衛(wèi)星控制系統(tǒng)通過(guò)對(duì)偏航角的控制,使太陽(yáng)矢量始終保持在衛(wèi)星本體坐標(biāo)系的XOZ平面內(nèi),同時(shí)調(diào)整太陽(yáng)翼的轉(zhuǎn)角,使衛(wèi)星太陽(yáng)翼的法線方向始終指向太陽(yáng)矢量方向,以獲得足夠的太陽(yáng)照射來(lái)獲取能量,保證星上的供電需求[1-2]。IGSO衛(wèi)星的偏航角運(yùn)動(dòng)主要和太陽(yáng)高度角以及太陽(yáng)方位角兩個(gè)因素有關(guān),而衛(wèi)星太陽(yáng)高度角在每年的變化又和衛(wèi)星的升交點(diǎn)赤經(jīng)相關(guān)[3],因此,分布于不同軌道面的衛(wèi)星因其升交點(diǎn)赤經(jīng)的不同其偏航角的運(yùn)動(dòng)規(guī)律是不同的。在IGSO衛(wèi)星進(jìn)行軌道維持時(shí),通常需要對(duì)偏航角進(jìn)行調(diào)整,使衛(wèi)星的推力方向平行于軌道切線方向。對(duì)于某些IGSO衛(wèi)星來(lái)講,例如IGSO導(dǎo)航衛(wèi)星,在進(jìn)行軌道維持的過(guò)程中,因?yàn)槠浇堑恼{(diào)整及軌道控制會(huì)影響衛(wèi)星業(yè)務(wù),通常設(shè)置為單星不可用,將此衛(wèi)星從星座的業(yè)務(wù)中分離出去,軌道維持完成后再擇機(jī)恢復(fù)衛(wèi)星業(yè)務(wù)。IGSO衛(wèi)星軌道維持時(shí)的偏航角調(diào)整通常有多種策略可以選擇,即選擇不同的成對(duì)推力器都能完成同樣的軌道控制任務(wù),但不同的偏航調(diào)整策略所需要的時(shí)間不同。中外學(xué)者對(duì)于IGSO衛(wèi)星的偏航角控制及其對(duì)軌道的影響等問(wèn)題開(kāi)展了一系列研究。文獻(xiàn)[4-6]研究了傾斜軌道衛(wèi)星的偏航姿態(tài)模型。文獻(xiàn)[7-8]研究了IGSO衛(wèi)星偏航姿態(tài)對(duì)太陽(yáng)光壓模型的影響。文獻(xiàn)[9-14]分析了傾斜軌道衛(wèi)星的偏航姿態(tài)對(duì)導(dǎo)航衛(wèi)星定軌精度、軌道預(yù)報(bào)精度的影響。文獻(xiàn)[15-16]分析了日本QZSS衛(wèi)星及其偏航角控制對(duì)衛(wèi)星軌道以及鐘差的影響。這些研究成果及關(guān)注點(diǎn)主要集中在IGSO衛(wèi)星的偏航角控制對(duì)衛(wèi)星業(yè)務(wù)及衛(wèi)星服務(wù)的影響分析上,對(duì)衛(wèi)星軌道維持時(shí)的偏航角如何調(diào)整這一工程實(shí)際問(wèn)題研究較少。隨著中國(guó)北斗導(dǎo)航系統(tǒng)等傾斜軌道衛(wèi)星在軌數(shù)目逐漸增多,在軌管理任務(wù)日益繁重,有必要研究衛(wèi)星軌道維持時(shí)更有效的調(diào)整偏航角策略,以提高星座的在軌管理效率。
本文對(duì)IGSO衛(wèi)星影響偏航角的因素以及偏航角的運(yùn)動(dòng)規(guī)律進(jìn)行了分析,在此基礎(chǔ)上從工程實(shí)用性出發(fā),提出了一種衛(wèi)星在不同工況下的偏航角調(diào)整策略,使衛(wèi)星在各種工況下偏航角的調(diào)整范圍最小,從而減少軌道維持過(guò)程的時(shí)間,減小軌道維持過(guò)程對(duì)衛(wèi)星業(yè)務(wù)的影響,為傾斜軌道衛(wèi)星在軌管理提供技術(shù)支撐。
1 IGSO衛(wèi)星偏航角運(yùn)動(dòng)規(guī)律分析
1.1 動(dòng)態(tài)偏航控制模式
首先定義衛(wèi)星坐標(biāo)系。
衛(wèi)星本體坐標(biāo)系ObXbYbZb:原點(diǎn)Ob位于衛(wèi)星質(zhì)心,Xb軸、Yb軸和Zb軸分別是衛(wèi)星3個(gè)轉(zhuǎn)動(dòng)慣量的主軸。
軌道坐標(biāo)系OoXoYoZo:原點(diǎn)Oo位于衛(wèi)星質(zhì)心,Zo軸指向地心,Yo軸指向軌道平面負(fù)法線方向,Xo軸與Zo軸、Yo軸構(gòu)成右手直角坐標(biāo)系。
衛(wèi)星姿態(tài)通常采用滾動(dòng)角、俯仰角和偏航角3個(gè)參數(shù)來(lái)描述。IGSO衛(wèi)星為了滿足天線對(duì)地指向和太陽(yáng)翼法向正對(duì)太陽(yáng)這兩個(gè)在軌條件,姿態(tài)控制目標(biāo)是使?jié)L動(dòng)角、俯仰角為0°,偏航角的控制目標(biāo)是使太陽(yáng)矢量始終保持在衛(wèi)星本體的XbObZb平面內(nèi)。這種偏航角控制方式通常稱為動(dòng)態(tài)偏航控制模式,偏航角Ψ的計(jì)算公式如下:
Ψ=arctan2(tanθs,sinα)
(1)
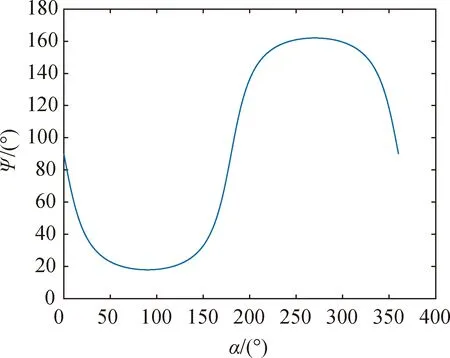
圖1 偏航角隨太陽(yáng)方位角的變化Fig.1 Variation of yaw angle with solar azimuth
式中:arctan2為FORTRAN語(yǔ)言庫(kù)函數(shù)中的一種反正切函數(shù);α為太陽(yáng)方位角,為太陽(yáng)矢量在軌道系XoOoZo平面的投影與Zo軸的夾角,以從+Zo軸向+Xo軸轉(zhuǎn)動(dòng)為正;θs為太陽(yáng)高度角,為太陽(yáng)矢量與軌道平面的夾角,以太陽(yáng)矢量指向軌道系+Yo面為正。圖1給出太陽(yáng)高度角θs為18°時(shí),太陽(yáng)方位角在一個(gè)軌道周期內(nèi)0°~360°之間變化時(shí),偏航角Ψ的變化曲線。
1.2 升交點(diǎn)赤經(jīng)對(duì)偏航角的影響
IGSO衛(wèi)星太陽(yáng)高度角以年為周期變化,太陽(yáng)高度角在一年中的最大值就是衛(wèi)星軌道面和黃道面的夾角,影響太陽(yáng)高度角最大值的主要因素是衛(wèi)星的軌道傾角和升交點(diǎn)赤經(jīng)。目前中國(guó)的IGSO衛(wèi)星星座中,衛(wèi)星的傾角一般為55°,分布在不同軌道面的衛(wèi)星升交點(diǎn)赤經(jīng)不同,則太陽(yáng)高度角最大值的表達(dá)式為:
cosθs=cos23.5°cos55°+sin23.5°sin55°cosΩ
(2)
式中:Ω為衛(wèi)星的升交點(diǎn)赤經(jīng)。圖2給出了隨著升交點(diǎn)赤經(jīng)的不同一年內(nèi)太陽(yáng)高度角θs絕對(duì)值的最大值的變化曲線。
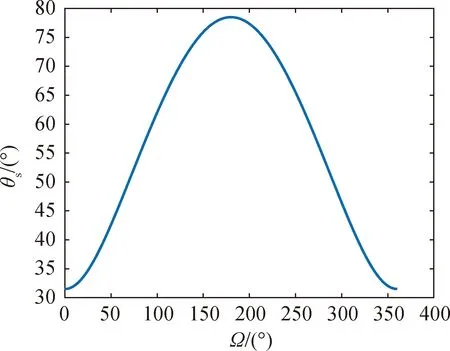
圖2 不同Ω對(duì)應(yīng)θs絕對(duì)值的最大值變化Fig.2 The maximum change in absolute value of θs corresponding to different Ω
通過(guò)式(2)計(jì)算及對(duì)圖2的分析,IGSO衛(wèi)星在不同升交點(diǎn)赤經(jīng)時(shí)的太陽(yáng)高度角θs的最大值變化規(guī)律如下:
1)當(dāng)Ω=0°或360°時(shí),太陽(yáng)高度角θs絕對(duì)值的最大值最小,為31.5°。
2)當(dāng)Ω=180°時(shí),太陽(yáng)高度角θs絕對(duì)值的最大值最大,為78.5°。
3)當(dāng)Ω在56°~304°的范圍內(nèi)時(shí),其太陽(yáng)高度角θs絕對(duì)值的最大值在45°~78.5°之間。
太陽(yáng)高度角絕對(duì)值的最大值隨衛(wèi)星軌道升交點(diǎn)赤經(jīng)不同而變化,這個(gè)變化影響了偏航角的年周期變化。圖3給出了偏航角隨著太陽(yáng)高度角θs和太陽(yáng)方位角α不同的變化曲面。從圖3可以看出,偏航角在一年的軌道周期中的曲面形貌差異是由衛(wèi)星的太陽(yáng)高度角最大值的差異造成的。
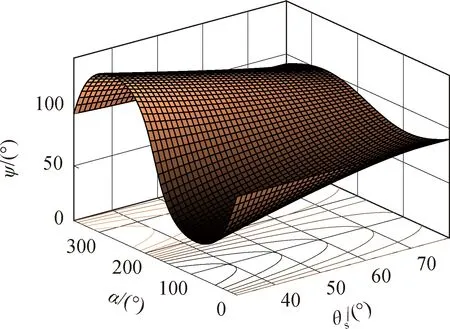
圖3 不同θs和α對(duì)應(yīng)的偏航角曲面Fig.3 Yaw angle surfaces for different θs and α
由此可以得到衛(wèi)星偏航角的運(yùn)動(dòng)規(guī)律如下:
1)偏航角的變化是周期性的,由短周期變化和長(zhǎng)周期變化疊加而成。長(zhǎng)周期變化與太陽(yáng)高度角的年周期變化有關(guān),以年為周期,短周期變化與太陽(yáng)方位角有關(guān),以天為周期。
2)對(duì)于同一軌道面的衛(wèi)星,由于升交點(diǎn)赤經(jīng)相同,因此太陽(yáng)高度角的最大值相同,偏航角的年周期變化曲面的整體形貌相同,對(duì)于不同軌道面的衛(wèi)星,由于升交點(diǎn)赤經(jīng)的差異,偏航角的年周期變化曲面的整體形貌有差異。
3)一年中衛(wèi)星的太陽(yáng)高度角在[-|θs|max,|θs|max]上變化,太陽(yáng)高度角的最小值為0°,當(dāng)太陽(yáng)高度角為正值時(shí),偏航角在每個(gè)軌道周期的變化幅度為θs~(180°-θs);當(dāng)太陽(yáng)高度角為負(fù)值時(shí),偏航角的每個(gè)軌道周期的變化幅度為θs~(-180°-θs)。太陽(yáng)高度角越大,偏航角的變化幅度越小;太陽(yáng)高度角越小,偏航角的變化幅度越大。
4)對(duì)于Ω=0°或360°的衛(wèi)星,太陽(yáng)高度角θs絕對(duì)值的最大值取得最小值,為31.5°,偏航角在太陽(yáng)高度角θs取得最大值時(shí)運(yùn)動(dòng)幅度最小,偏航角的變化幅度為31.5°~148.5°或-31.5°~-148.5°。對(duì)于Ω=180°的衛(wèi)星,太陽(yáng)高度角θs絕對(duì)值的最大值取得最大值,為78.5°,偏航角在太陽(yáng)高度角θs取得最大值時(shí)運(yùn)動(dòng)幅度最小,偏航角的變化幅度為78.5°~101.5°或-78.5°~-101.5°。
2 衛(wèi)星軌道維持時(shí)的偏航角調(diào)整策略
2.1 推力器的配置與布局
某在軌IGSO衛(wèi)星的軌道維持所需推力由雙組元推進(jìn)系統(tǒng)的10N推力器提供,共安裝12個(gè)10N推力器,分成A、B兩個(gè)分支。推力器的安裝方位如圖4所示[17]。
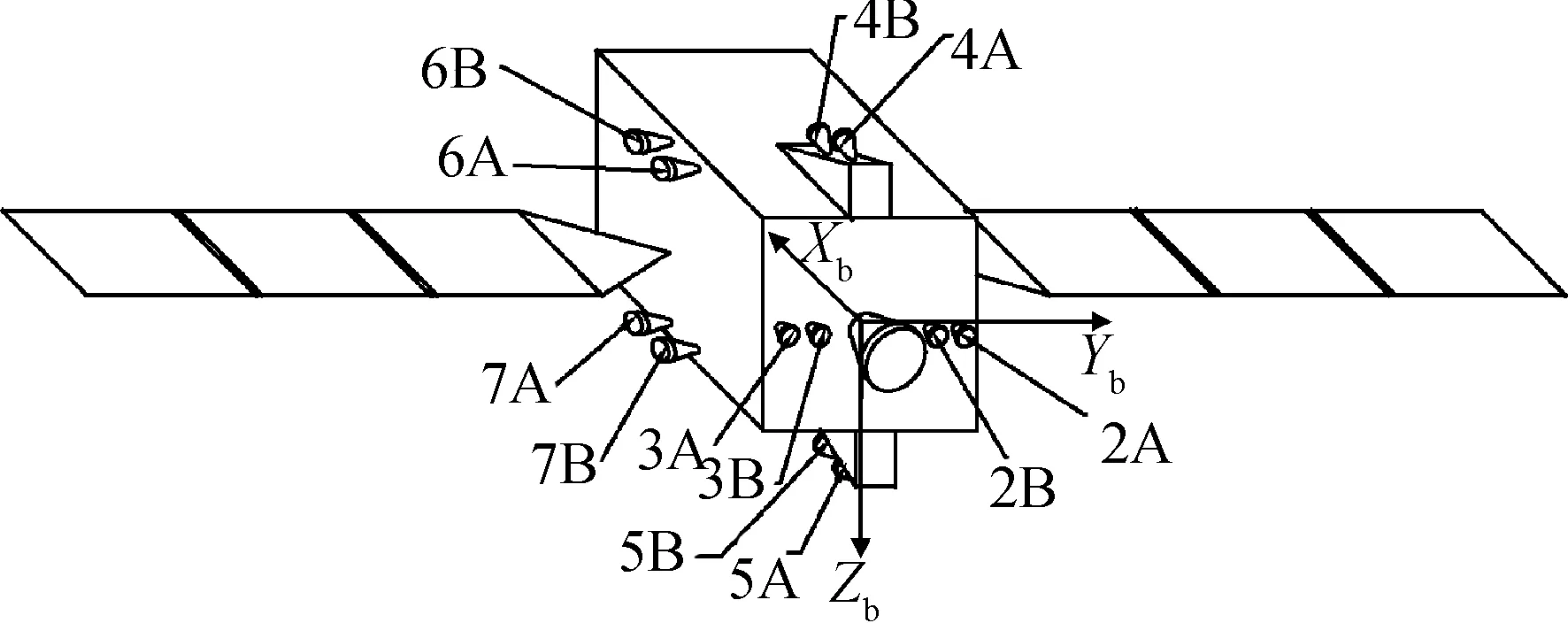
圖4 衛(wèi)星推力器的配置與布局Fig.4 Configuration and layout of satellite thrusters
每個(gè)分支中推力器2和3是一對(duì),分別產(chǎn)生-Z和+Z方向控制力矩,兩者成對(duì)同時(shí)工作可產(chǎn)生+X的軌控推力;推力器4和5分別產(chǎn)生+Y和-Y力矩,成對(duì)工作可產(chǎn)生-X推力;推力器6和7分別產(chǎn)生+X和-X力矩,成對(duì)工作可產(chǎn)生+Y推力。在進(jìn)行軌道維持時(shí),可以選用某一分支的兩個(gè)推力器進(jìn)行軌道控制。
2.2 軌道維持時(shí)偏航角的調(diào)整方法
把衛(wèi)星軌道的XoOoYo平面分成如圖5所示的6個(gè)區(qū)域,各區(qū)域的定義如下:
區(qū)域1為圓心角AOB對(duì)應(yīng)區(qū)域,圓心角為90°,關(guān)于Xo軸對(duì)稱。
區(qū)域2為圓心角BOC對(duì)應(yīng)區(qū)域,圓心角為45°,與區(qū)域3關(guān)于Yo軸對(duì)稱。
區(qū)域3為圓心角COD對(duì)應(yīng)區(qū)域,圓心角為45°,與區(qū)域2關(guān)于Yo軸對(duì)稱。
區(qū)域4為圓心角DOE對(duì)應(yīng)區(qū)域,圓心角為90°,關(guān)于Xo軸對(duì)稱。
區(qū)域5為圓心角EOF對(duì)應(yīng)區(qū)域,圓心角為45°,與區(qū)域6關(guān)于Yo軸對(duì)稱。
區(qū)域6為圓心角FOA對(duì)應(yīng)區(qū)域,圓心角為45°,與區(qū)域5關(guān)于Yo軸對(duì)稱。
表1給出了軌道維持時(shí)偏航角所處的范圍與偏航角調(diào)整的目標(biāo)值的關(guān)系,以及對(duì)應(yīng)的推力器選擇策略。為了獲得軌道坐標(biāo)系+Xo或者-Xo方向的推力,對(duì)衛(wèi)星進(jìn)行加速或者減速進(jìn)行軌道維持,按照表1進(jìn)行偏航角調(diào)整時(shí),所需調(diào)整的偏航角最小。表中的2A3A、4A5A、6A7A分別表示A分支的3對(duì)推力器。
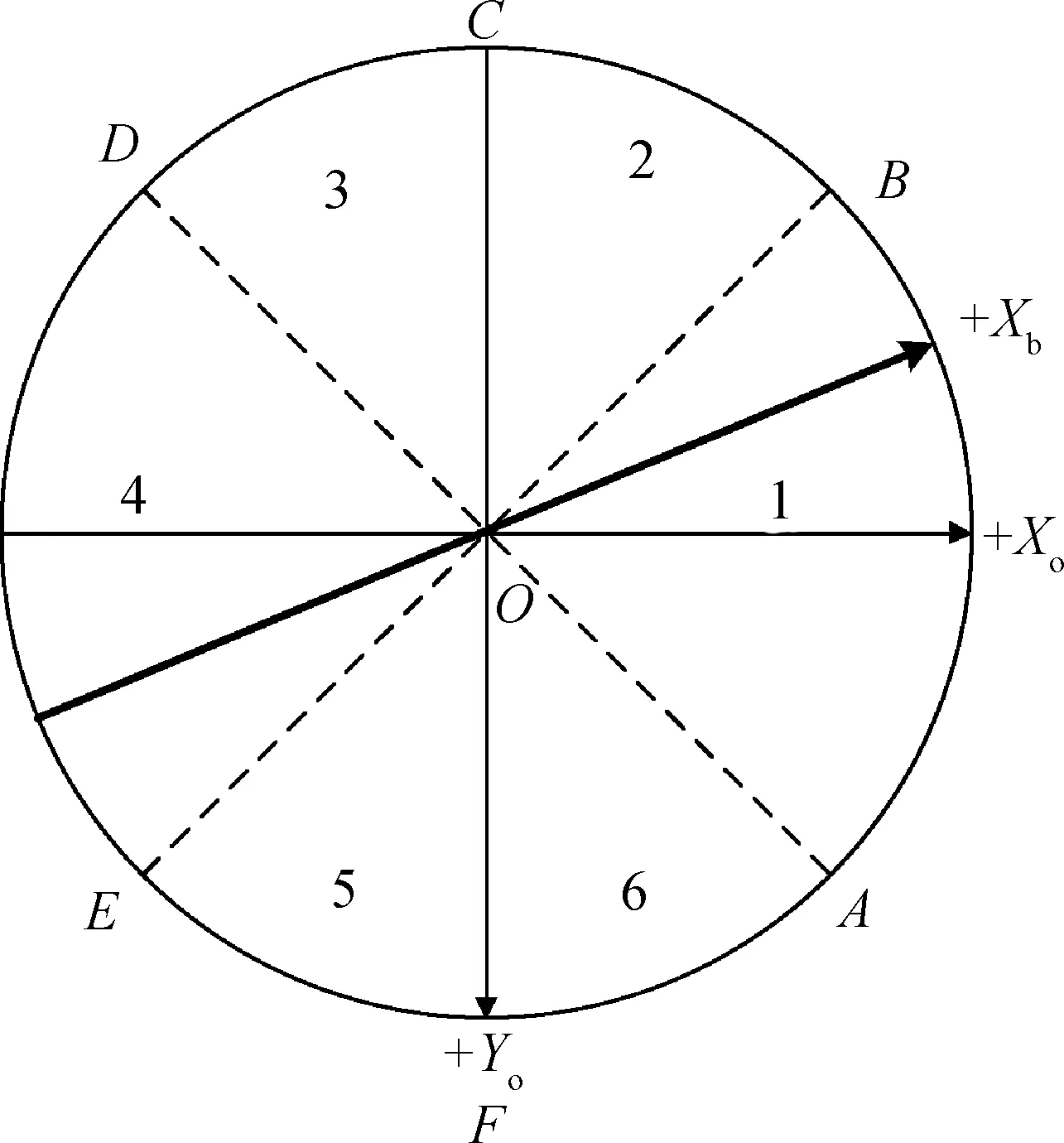
圖5 衛(wèi)星偏航角區(qū)域劃分Fig.5 Satellite yaw angle division
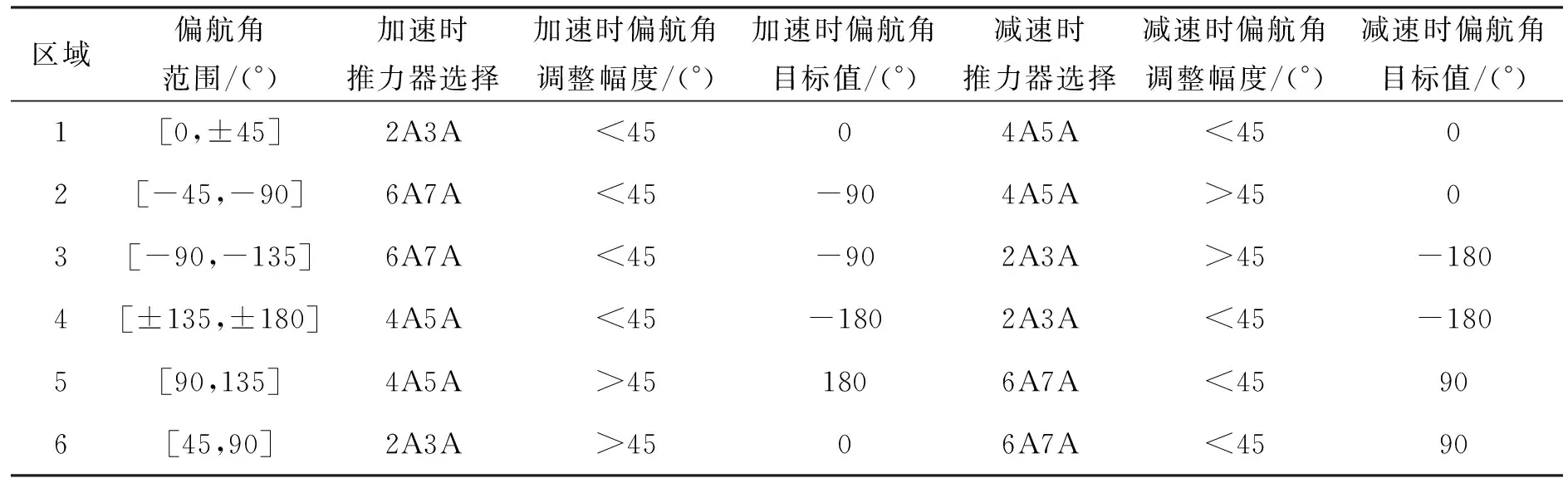
表1 偏航角調(diào)整策略與推力器選擇
對(duì)于衛(wèi)星軌道維持時(shí)的偏航角調(diào)整策略,有如下分析和建議:
1)當(dāng)軌道控制的時(shí)間固定時(shí),根據(jù)當(dāng)時(shí)偏航角所處的區(qū)間,按照表1進(jìn)行偏航角調(diào)整,并選擇相應(yīng)的推力器進(jìn)行軌控,可以保證偏航角的調(diào)整量最小。
2)當(dāng)軌道控制的時(shí)間可以選擇時(shí),應(yīng)選擇偏航角在區(qū)域1或者區(qū)域4的時(shí)間段進(jìn)行軌道控制,無(wú)論是對(duì)衛(wèi)星加速還是減速,偏航角的調(diào)整量均小于45°,可以避免偏航角的調(diào)整量大于45°的工況。
3)對(duì)于升交點(diǎn)赤經(jīng)Ω在0°~56°或者304°~360°之間的衛(wèi)星,因其一年中太陽(yáng)高度角θs最大值不超過(guò)45°,軌道維持時(shí)應(yīng)優(yōu)選區(qū)域1或者區(qū)域4的時(shí)間段進(jìn)行軌控。
4)對(duì)于升交點(diǎn)赤經(jīng)Ω在56°~304°之間的衛(wèi)星,因其一年中太陽(yáng)高度角θs最大值超過(guò)45°,則在一年中太陽(yáng)高度角θs超過(guò)45°的一段時(shí)期,衛(wèi)星偏航角長(zhǎng)期在區(qū)域2、區(qū)域3或者區(qū)域5、區(qū)域6運(yùn)行,此時(shí)無(wú)法避免偏航角的調(diào)整范圍可能超過(guò)45°的情況,偏航角調(diào)整量較大,可能導(dǎo)致測(cè)量偏航角的太陽(yáng)敏感器不可用,只能使用陀螺等其他敏感器定姿。
5)對(duì)于同一軌道面的衛(wèi)星,如果相位調(diào)整的周期較長(zhǎng),軌道控制時(shí)間可以選擇的余地較大,應(yīng)盡量選擇太陽(yáng)高度角較小的時(shí)間段進(jìn)行。此時(shí)在一個(gè)軌道周期中偏航角的運(yùn)動(dòng)幅度較大,可以在偏航角接近0°附近時(shí)選擇一對(duì)推力器進(jìn)行加速或者減速,在偏航角運(yùn)行到180°附近時(shí)選擇同樣的推力器進(jìn)行減速或者加速,軌道維持精度更高。
6)對(duì)于中國(guó)IGSO衛(wèi)星的交叉點(diǎn)[18]位置保持,由于交叉點(diǎn)位置通常在東經(jīng)90°~東經(jīng)120°的經(jīng)度區(qū)間,軌道維持屬于減速操作,應(yīng)盡量避開(kāi)區(qū)域2和區(qū)域3,以避免偏航角調(diào)整超過(guò)45°。
3 設(shè)計(jì)實(shí)例及分析
為驗(yàn)證偏航角調(diào)整策略的有效性,本節(jié)給出一個(gè)具體的IGSO衛(wèi)星在軌管理中的實(shí)例。假設(shè)某IGSO導(dǎo)航衛(wèi)星交叉點(diǎn)地理經(jīng)度為東經(jīng)118°,升交點(diǎn)赤經(jīng)Ω=30°。由式(2)可知,太陽(yáng)高度角θs絕對(duì)值的最大值為36°。因?yàn)樵谝荒曛刑?yáng)高度角θs最大值不超過(guò)45°,由前面的分析可知,軌道維持時(shí)應(yīng)優(yōu)選區(qū)域1或者區(qū)域4的時(shí)間段進(jìn)行軌控。假設(shè)在衛(wèi)星實(shí)際的太陽(yáng)高度角θs為-20°附近時(shí)需要進(jìn)行軌道維持,由于衛(wèi)星的交叉點(diǎn)在東經(jīng)118°,軌道維持屬于減速操作。在軌道維持時(shí),按照表1中的設(shè)計(jì),需要避開(kāi)偏航角位于區(qū)域2和區(qū)域3的時(shí)間段。每天當(dāng)偏航角位于區(qū)域1時(shí),選用4A5A的一對(duì)推力器,或者當(dāng)偏航角位于區(qū)域4時(shí),選用2A3A的一對(duì)推力器完成軌道維持操作,偏航角的調(diào)整幅度小于45°。
4 結(jié)束語(yǔ)
本文從衛(wèi)星在軌管理的工程實(shí)際出發(fā),針對(duì)IGSO衛(wèi)星軌道維持時(shí)的偏航角調(diào)整策略進(jìn)行了研究,主要結(jié)論如下:
1)分析了衛(wèi)星升交點(diǎn)赤經(jīng)對(duì)IGSO衛(wèi)星偏航角運(yùn)動(dòng)規(guī)律的影響,在此基礎(chǔ)上提出了一種衛(wèi)星軌道維持時(shí)的偏航角調(diào)整策略,在軌道控制時(shí)可以使偏航角的調(diào)整幅度最小,從而縮短衛(wèi)星軌道維持過(guò)程的時(shí)間。對(duì)于中國(guó)境內(nèi)的IGSO衛(wèi)星,提出了衛(wèi)星在軌道維持時(shí)應(yīng)優(yōu)先選擇的偏航角調(diào)整時(shí)機(jī)及調(diào)整方法,可以保證偏航角調(diào)整的幅度不超過(guò)45°。
2)對(duì)于IGSO衛(wèi)星星座,衛(wèi)星在軌數(shù)量的增加,導(dǎo)致衛(wèi)星軌道維持次數(shù)的增加。通過(guò)本方法快速確定相關(guān)的偏航角調(diào)整以及推力器選擇方案,可以應(yīng)用于衛(wèi)星在軌管理的實(shí)踐中,為衛(wèi)星的軌道維持操作提供參考。
猜你喜歡
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
科學(xué)(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學(xué)輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農(nóng)墾科技(2016年2期)2016-08-21 13:50:16
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
新疆財(cái)經(jīng)大學(xué)學(xué)報(bào)(2015年3期)2015-12-10 03:49:15
