航天器多約束姿態機動時-虛混合域規劃方法
2020-12-07 06:25:40朱圣英梁子璇
宇航學報 2020年11期
王 輝,徐 瑞,朱圣英,梁子璇
(1.北京理工大學宇航學院,北京 100081;2.深空自主導航與控制工信部重點實驗室,北京 100081)
0 引 言
在軌運行的航天器經常需要進行姿態機動來完成特定的任務,例如通信、觀測和跟蹤。航天器上的燃料和電能都是有限的;因此,減少姿態機動過程中的能量消耗對于任務成功執行非常重要。進一步地,空間中存在很多明亮天體,例如太陽、火星和月亮;航天器上的某些光學敏感器(例如星敏感器和紅外望遠鏡)在姿態機動過程中不能曝光于這些明亮天體下,否則可能會損壞。同時,為了保持對地通信,航天器上的天線在姿態機動過程中需要與地面站保持一定的指向關系。另外,陀螺儀和太陽敏感器等儀器都需要航天器的角速度不能太大,否則會造成較差的角速度測量和姿態估計結果;航天器上的執行機構一般只能提供有限的控制力矩。最后,航天器姿態機動過程中還需要滿足自身的姿態運動學和動力學約束。
這些約束[1-4]的存在極大地限制了航天器在姿態機動過程中的可行空間,這使得多約束姿態機動規劃問題變得難以求解。為了解決多約束姿態機動問題,McInnes[5]使用人工勢函數[6-8]的方法,通過對禁忌區域施加高的勢能來實現對姿態指向禁忌約束的規避。該方法對計算資源的要求較低,但是未考慮角速度和控制力矩有界約束,且歐拉角的姿態表示方式容易導致奇異性問題。Hablani[9]在單位球上定義排斥區域,并主要通過求解兩個相關轉角得到理想的切線路徑來規避明亮天體,即需要的俯仰/偏航轉角和明亮天體相對于旋轉平面的排斥角。該方法簡單直觀,但是只適合于處理少量指向約束的情況。Frazzoli等[10]應用隨機規劃[11-12]方法求解該問題,可以快速搜索得到可行的姿態路徑。該方法能處理復雜指向約束的情況,但是隨機算法具有很大的不確定性,星上應用不可靠。Kim等[13]將禁忌約束轉化成二次凸約束的形式,并將邊界條件表示成二次型形式的目標函數,而后利用半定規劃[14-15]方法求解得到滿足約束的姿態機動軌跡。該方法采用單步規劃,且未考慮性能指標優化。Kjellberg等[16]利用二十面體離散化方法和A*搜索算法求解復雜指向約束下的姿態機動可行路徑。該姿態路徑規劃算法未考慮姿態動力學和有界約束。Biggs等[17]提出了一種半解析的幾何姿態運動規劃方法來同時處理禁忌約束和有界約束。該方法通過改變路徑參數來生成不同的姿態路徑,規避禁忌約束;同時,利用時間參數化的方法來改變機動角速度,并實現滿足有界約束。該方法計算代價較小,但是只適合處理簡單的小范圍禁忌區域的情況。
在考慮多種復雜約束的情況下,姿態機動規劃問題已經很難求解。引入能量消耗這一優化指標,又進一步給問題帶來一個巨大的挑戰。Sun等[18]利用半定松弛方法將原來的非凸二次約束二次規劃問題轉化為半定規劃問題,并通過迭代秩最小化方法逐漸得到最優解,實現了復雜指向約束下能量最優姿態機動。武長青等[19]引入線性松弛方法將原問題轉化為雙線性規劃問題,并通過求解其中一個變量的凸包絡和凹包絡,得到原問題的一個線性松弛解,最后通過基于評價函數的迭代規劃算法求出原問題的近優解,實現了復雜指向約束下低能量姿態機動。Wu等[20]利用改進的差分進化算法來得到復雜約束下姿態機動近優解。這些方法計算效率較低,難以實現星上應用。偽譜法[21-23]是一種求解優化問題的直接法,廣泛應用于多種軌跡規劃問題。該類方法利用正交多項式來表示最優解曲線,將原來的最優控制問題轉化為求解正交多項式展開系數的非線性規劃問題。偽譜法采用了非一致節點離散化方法,只需少量的節點就可以完成對優化問題的離散化。但是,偽譜法只能保證在節點處滿足指向約束,而并未考慮中間稀疏節點之間的路徑是否滿足約束。而且當節點個數增加時,偽譜法的計算效率會顯著降低。
本文首先提出了時-虛混合域的概念,而后采用連續的路徑和時間參數化,建立了時-虛混合域上非線性約束問題模型,提出了時-虛混合域單點式非線性姿態機動規劃方法,解決了文獻[17]中方法只適合處理簡單的小范圍禁忌區域的問題,并且有效減少了航天器姿態機動中的能量消耗,實現了連續光滑的多約束低能量姿態機動的高效規劃。
1 航天器姿態機動中的多種復雜約束
用旋轉矩陣表示航天器的姿態,剛體航天器的姿態運動學方程[17,24]可以表示如下:
(1)
式中:CIB表示從本體坐標系到慣性坐標系的旋轉矩陣,如式(2)所示。ω=[ω1,ω2,ω3]T表示本體坐標系下航天器的角速度。x×表示由x=[x1,x2,x3]T定義的斜對稱矩陣,如式(3)所示。q=[q0,q1,q2,q3]T是單位四元數,表示從本體坐標系到慣性坐標系的旋轉。q0是標量部分。

(2)
(3)
剛體航天器的姿態動力學方程[25-26]如下所示:
(4)
式中:u=[u1,u2,u3]T表示本體坐標系下的控制力矩。J∈R3×3表示航天器的慣量矩陣。如果本體坐標系是主軸坐標系,則有J=diag(J1,J2,J3)。
在實際工程應用中,航天器上測量儀器的量程有限;某些儀器的正常工作需要航天器的角速度不能太大;執行機構提供的控制力矩是有界的。這形成了航天器姿態機動過程中的角速度和控制力矩有界約束[25-26],可以分別表示為如下不等式的形式。
|ωj|≤ωmax,j=1,2,3
(5)
|uj|≤umax,j=1,2,3
(6)
式中:ωj和uj為分量約束的角速度和控制力矩。如果對整體矢量有約束,則可以將約束表示為角速度和控制力矩的2范數的形式。

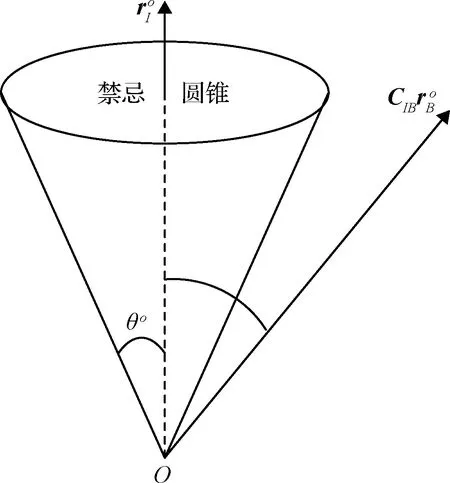
圖1 禁忌約束
(7)


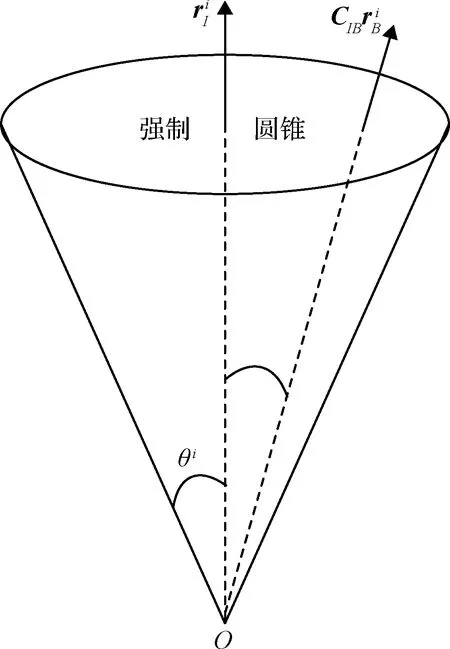
圖2 強制約束
(8)

姿態機動初始和終端邊界條件可以歸納為如下形式:
(9)

2 時-虛混合域單點式非線性姿態機動規劃方法
為了解決多約束低能量姿態機動規劃問題,本文提出了時-虛混合域的概念和時-虛混合域單點式非線性姿態機動規劃方法。時-虛混合域的含義如定義1所示。時-虛混合域模型采用連續參數化的虛擬域解析路徑集以及時域角速度和控制力矩來描述兩點間姿態機動,而后通過統一的非線性參數優化和單點式路徑分解置換規劃求解得到復雜多約束下低能量姿態機動軌跡以及連續光滑的角速度和控制力矩曲線。
定義1.時-虛混合域指的是時域和虛擬域同步存在而形成的定義域。具體地對于姿態機動問題而言,在虛擬域上描述姿態機動路徑,在時域上描述角速度和控制力矩,并且姿態機動路徑以及角速度和控制力矩的求解過程同步進行。
2.1 時-虛混合域上非線性約束問題建模

(10)
其中,CW(p)=[xyz],如式(11)~式(13)所示:
(11)
(12)
(13)
式中:

M1(p)=Asech(γp+C)
M2(p)=Bsech(γp+C)








(14)
(15)
(16)
不同于文獻[17]中首先求解虛擬域姿態機動路徑而后通過調整機動時間來改變角速度和控制力矩進而滿足有界約束的方法,本文提出了時-虛混合域的概念,統一優化求解虛擬域姿態路徑以及時域角速度和控制力矩。時-虛混合域模型在保持路徑和時間參數化所帶來的問題降維和約束解耦等優點的基礎上,通過統一同步優化機制,進一步增加了優化的全局性,以實現更好的目標優化。

(17)
(18)
2.2 單點式路徑分解置換規劃方法
通過對式(18)建立的時-虛混合域上非線性約束問題的參數優化,可以得到連接任意的起始和目標姿態的虛擬域路徑以及時域角速度和控制力矩。如果該路徑違反指向約束,則選取約束違背路徑區域中間位置對應的最近臨界增量節點[25]作為路徑分解置換節點。而后同樣根據式(18)依次求解各段姿態機動。每段姿態路徑如果再次違反指向約束,則需要再次進行單點式路徑分解置換。單軸禁忌約束下單次單點式路徑分解置換如圖3所示。圖中實線圓包圍起來的部分為禁忌區域;虛線邊界圓通過給禁忌約束增加最近臨界增量角得到;從起點到目標點的箭頭虛線是分解置換前的路徑;從起點到目標點的箭頭實線是分解置換后的路徑;箭頭虛線上的五角星節點是當前約束違背路徑區域中間位置節點;箭頭實線上的六角星節點是當前路徑分解置換節點。
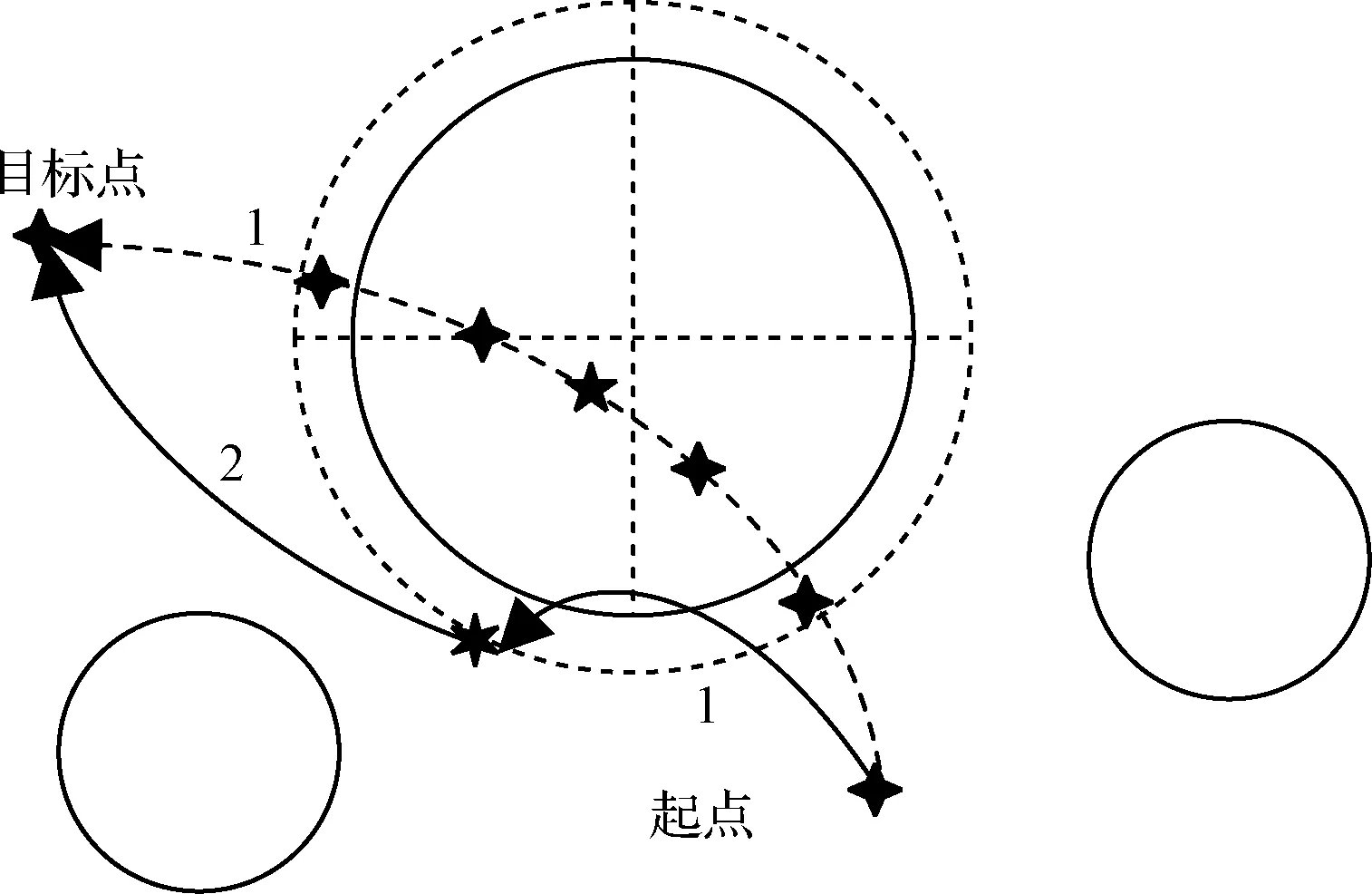
圖3 單軸禁忌約束下單次單點式路徑分解置換
特別地,最近臨界增量節點指的是在增量圓錐邊界上跟當前位置節點角度距離最近的節點。增量圓錐通過在指向約束角的基礎上疊加一個增量角度得到。該增量角度對于禁忌約束為正值,對于強制約束為負值。根據從當前位置節點到最近臨界增量節點的歐拉旋轉的姿態關系,可以得到最近臨界增量節點的求解方法如式(19)所示,詳細的過程可以參考文獻[25]。
(19)

2.3 算法流程
本文時-虛混合域單點式非線性姿態機動規劃方法的算法流程如圖4所示,算法步驟如下。
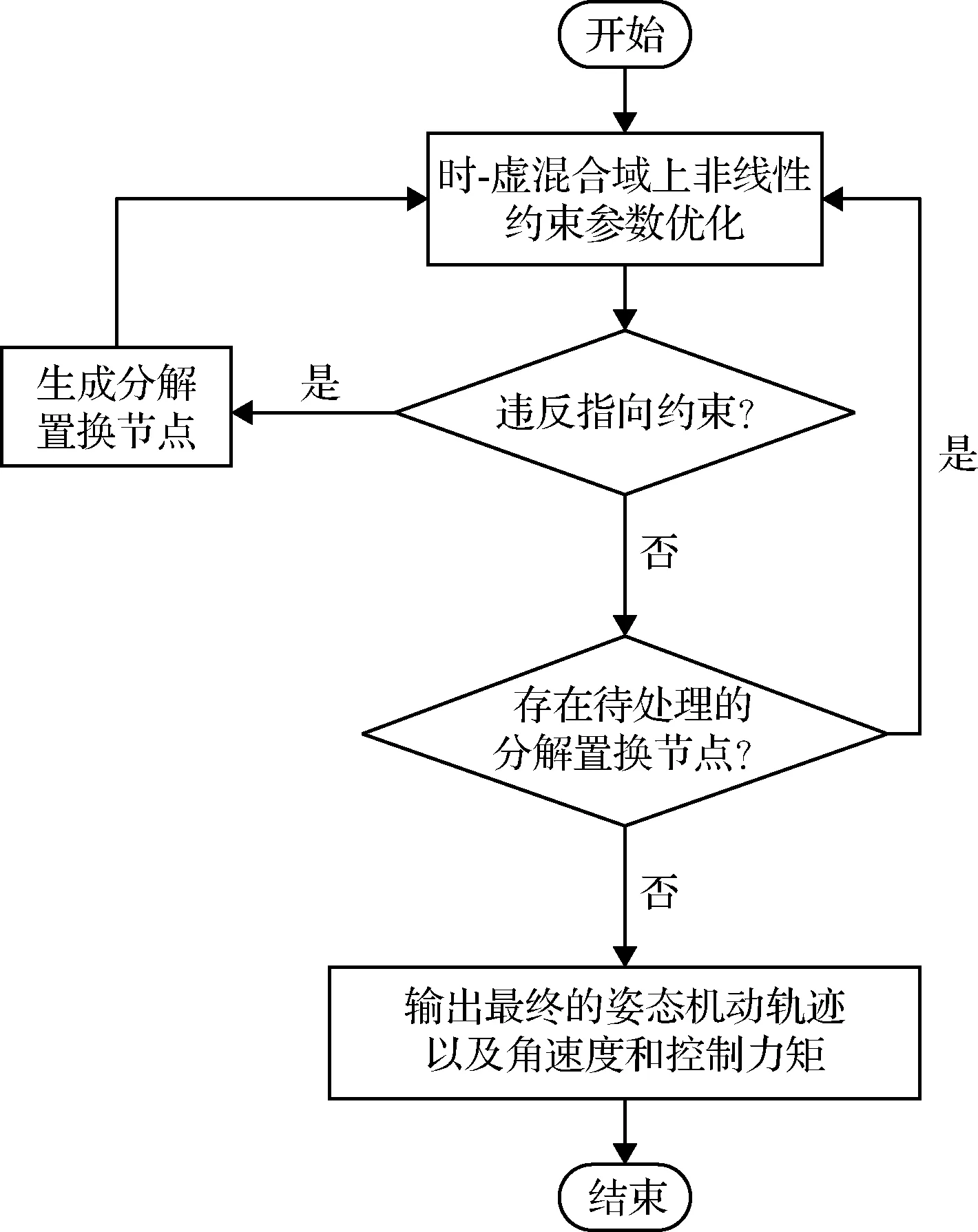
圖4 時-虛混合域算法流程圖
步驟1:求解式(18)所示的時-虛混合域上非線性約束問題,得到當前段姿態路徑以及角速度和控制力矩。
步驟2:判斷該段路徑是否違反指向約束;否,執行步驟7;是,得到指向約束違反區域個數N,執行步驟3。
步驟3:對于每塊指向約束違反區域,生成相應的路徑分解置換節點。
步驟4:根據式(18)建模并求解出本段姿態路徑以及角速度和控制力矩;再判斷本段路徑是否違反指向約束;否,執行步驟5;是,重復步驟3~6。
步驟5:根據式(18)建模并求解出下一段姿態路徑以及角速度和控制力矩。
步驟6:然后再判斷下一段姿態路徑是否違反指向約束;否,重復步驟5到6,直到求解出全部N+1段姿態路徑以及角速度和控制力矩,執行步驟7;是,重復步驟3~6。
步驟7:輸出最終的姿態機動軌跡以及角速度和控制力矩。
3 仿真與分析
本節分別進行單軸禁忌約束以及多軸禁忌和強制約束仿真來說明本文方法的有效性和優勢。仿真在普通的臺式電腦(3.00 GHz CPU和3.00 GB RAM)上利用MATLAB編程實現。航天器能提供的最大控制力矩為0.1 N·m,允許的最大角速度為0.0471 rad·s-1,基本參數如表1所示。航天器X軸和Y軸正方向上分別安裝有一個星敏感器和通信天線。
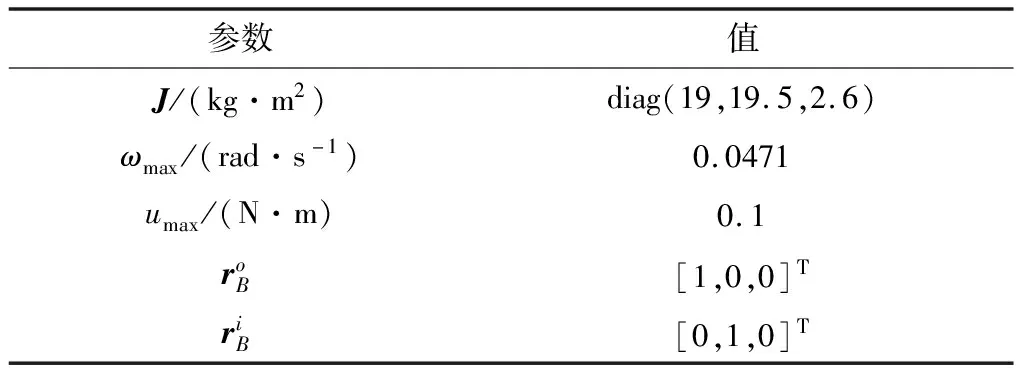
表1 航天器的基本參數
3.1 單軸禁忌約束
本節首先考慮單軸禁忌約束的情況。在姿態機動過程中,星敏感器需要規避四個明亮天體禁忌約束,相關參數如表2所示。姿態機動的初始和終端邊界條件如式(20)所示。
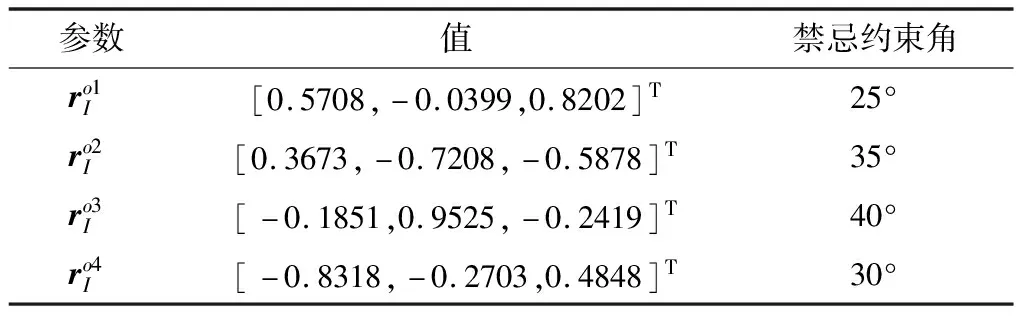
表2 禁忌約束參數
(20)
本文方法求得的星敏感器視線軸(X軸)在慣性坐標系下經緯度形式的機動軌跡如圖5所示。圖中連接起點到目標點的實線是求得的機動軌跡,密集圓點包圍起來的部分是由禁忌約束產生的禁忌區域。其中,對于慣性坐標系下任意的單位矢量y∈R3,相應的經緯度計算如式(21)所示。從圖5可以看出,本文方法可以有效地得到安全規避多個禁忌約束的姿態機動軌跡。
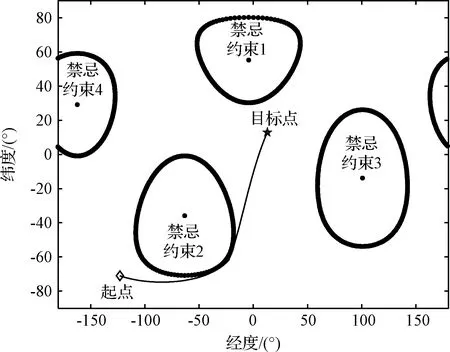
圖5 X軸的機動軌跡
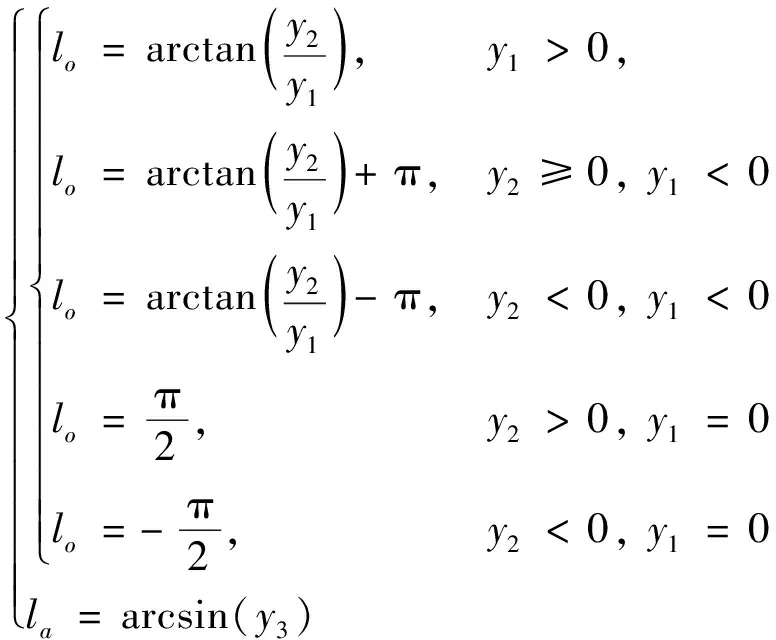
(21)
式中:y=[y1,y2,y3]T,lo和la分別表示經度和緯度。
機動過程中角速度和控制力矩隨時間變化的曲線分別如圖6和圖7所示。從圖6~7可以看出,本文方法在單軸禁忌約束下求得的角速度和控制力矩都滿足有界約束,而且角速度曲線連續光滑,控制力矩曲線連續且分段光滑。
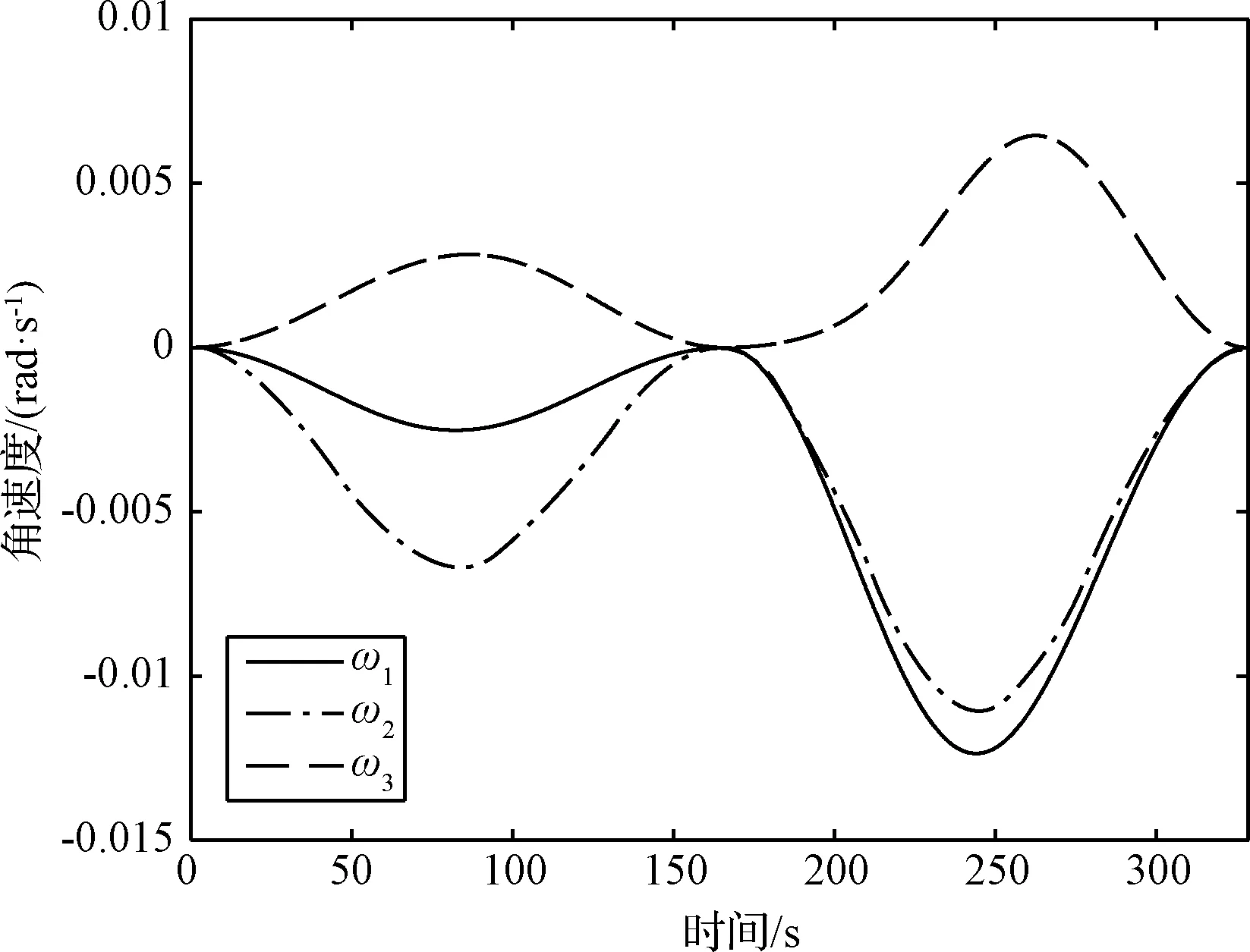
圖6 角速度曲線
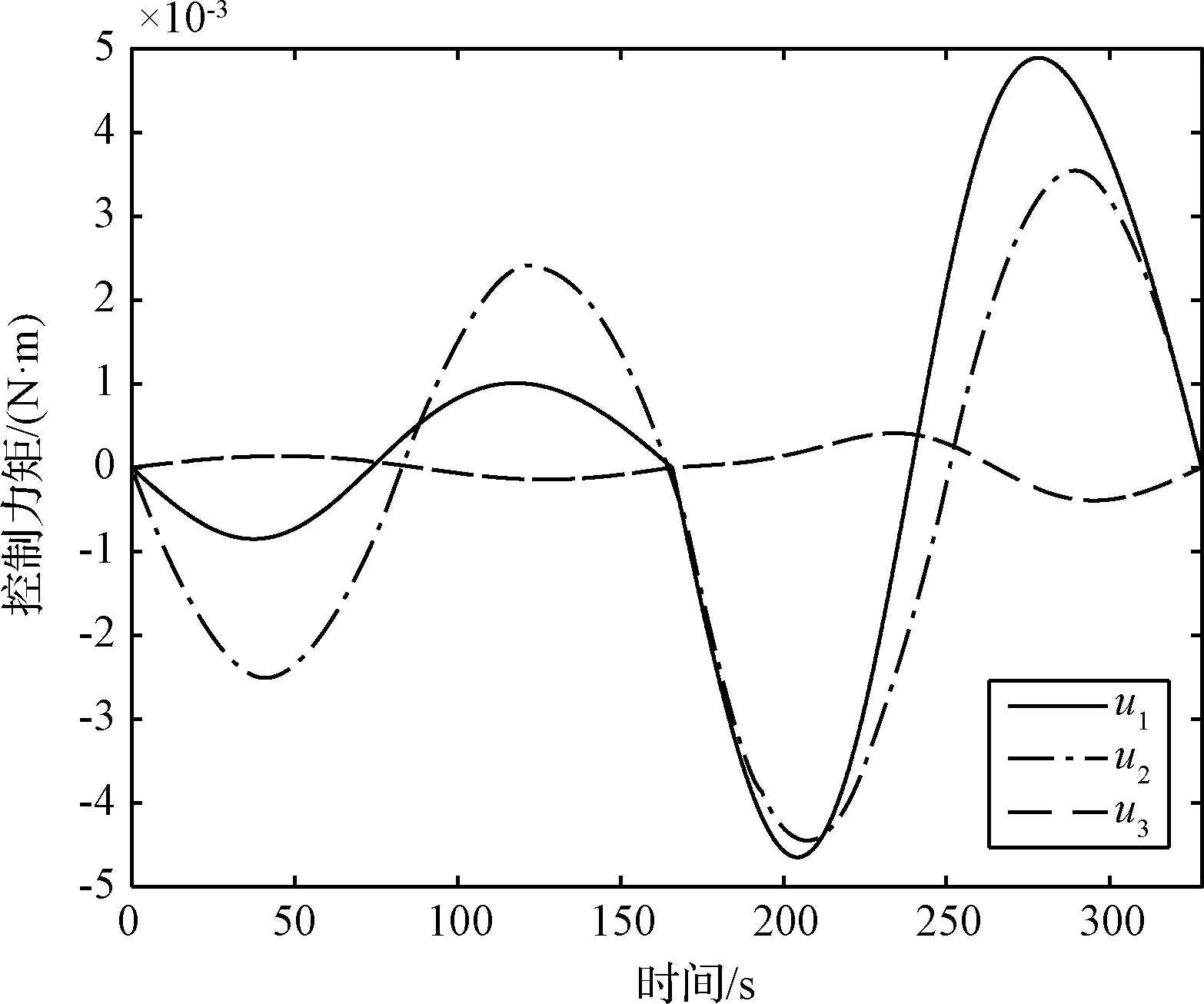
圖7 控制力矩曲線
本文方法的平均規劃時間是3.98 s,如表3所示。本文方法求得的姿態機動的能量消耗是0.0038 N2·m2·s。相同條件下,基于MATLAB GPOPS工具箱的偽譜法[21-23,26,29]的平均規劃時間是15.93 s。偽譜法求得的姿態機動的能量消耗是0.0109 N2·m2·s。本文方法的規劃時間比偽譜法減少了75%,并且求得的姿態機動的能量消耗比偽譜法減少了65%。本文方法在單軸禁忌約束下可以快速地得到低能量的姿態機動規劃結果。
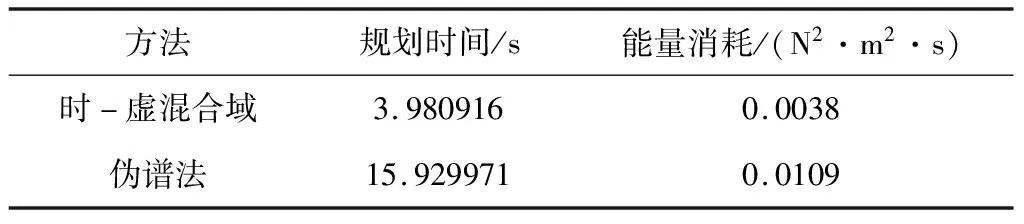
表3 時-虛混合域方法和偽譜法的規劃結果
3.2 多軸禁忌和強制約束
本節進一步考慮更加復雜的多軸禁忌和強制約束情況。在姿態機動過程中,天線需要保持與地面站通信,同時星敏感器需要規避四個明亮天體禁忌約束,相關參數如表4所示。姿態機動的初始和終端邊界條件如式(22)所示。
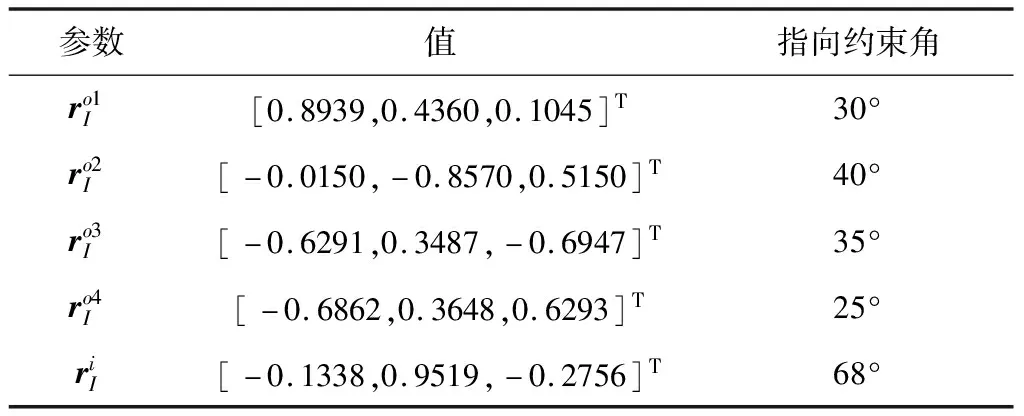
表4 指向約束參數
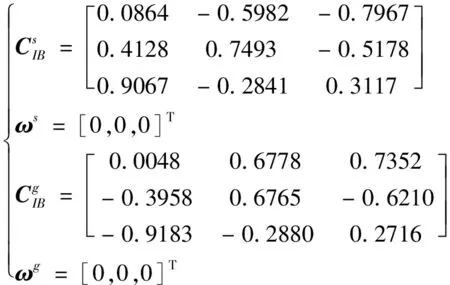
(22)
本文方法求得的星敏感器視線軸(X軸)在慣性坐標系下經緯度形式和通信天線(Y軸)在慣性坐標系下三維空間的機動軌跡以及角速度和控制力矩隨時間變化的曲線分別如圖8~圖11所示。圖8的經緯圖的含義和圖5相同。圖9中圓錐包含的部分是由強制約束產生的強制區域。從圖8和圖9可以看出,本文方法求得的姿態機動軌跡在安全規避多個禁忌約束的同時可以實現滿足強制約束。從圖10和圖11可以看出,本文方法在非常復雜的多軸禁忌和強制約束下同樣可以得到滿足有界約束的角速度和控制力矩,而且角速度曲線連續光滑,控制力矩曲線連續且分段光滑。
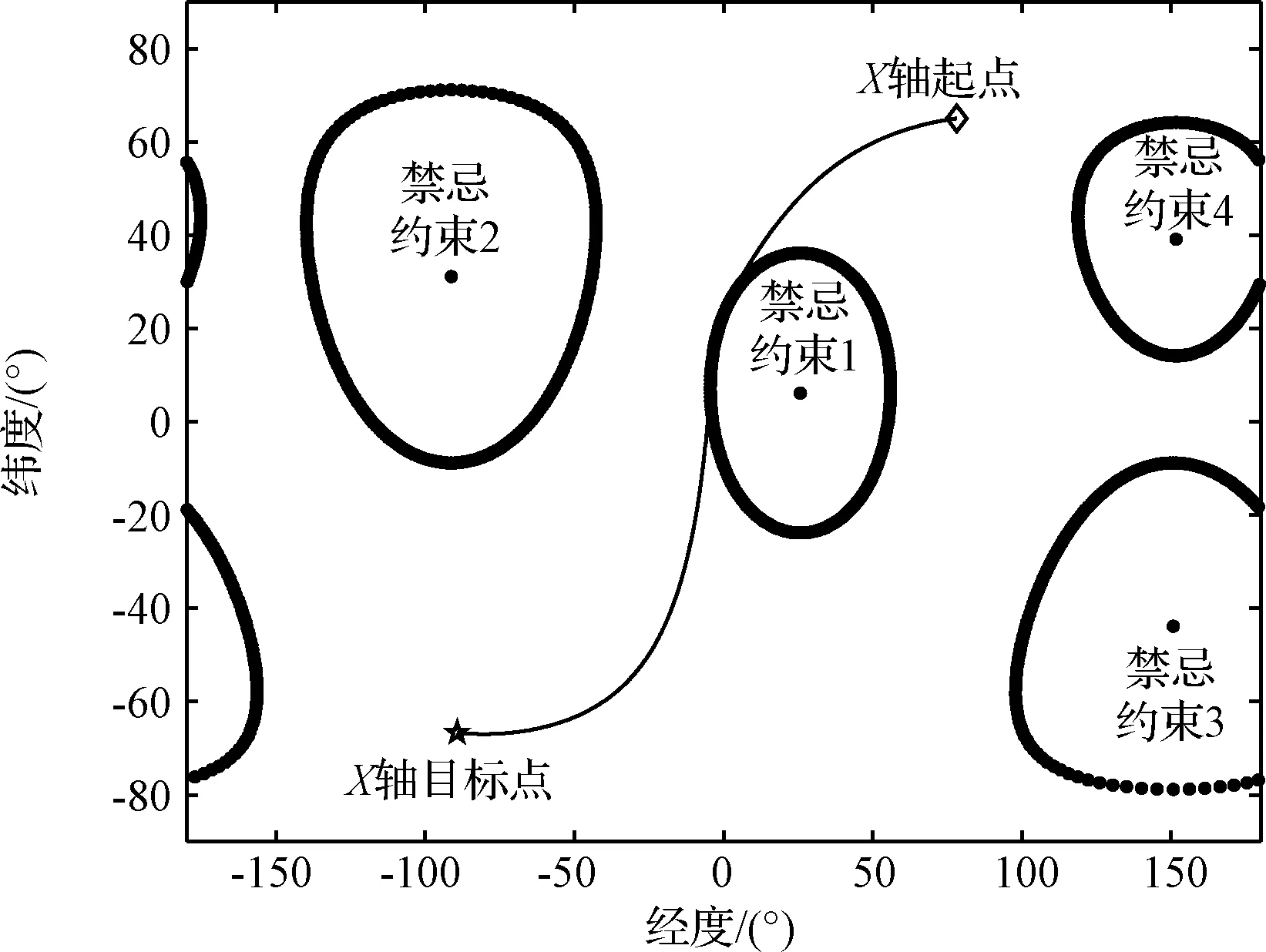
圖8 X軸的機動軌跡
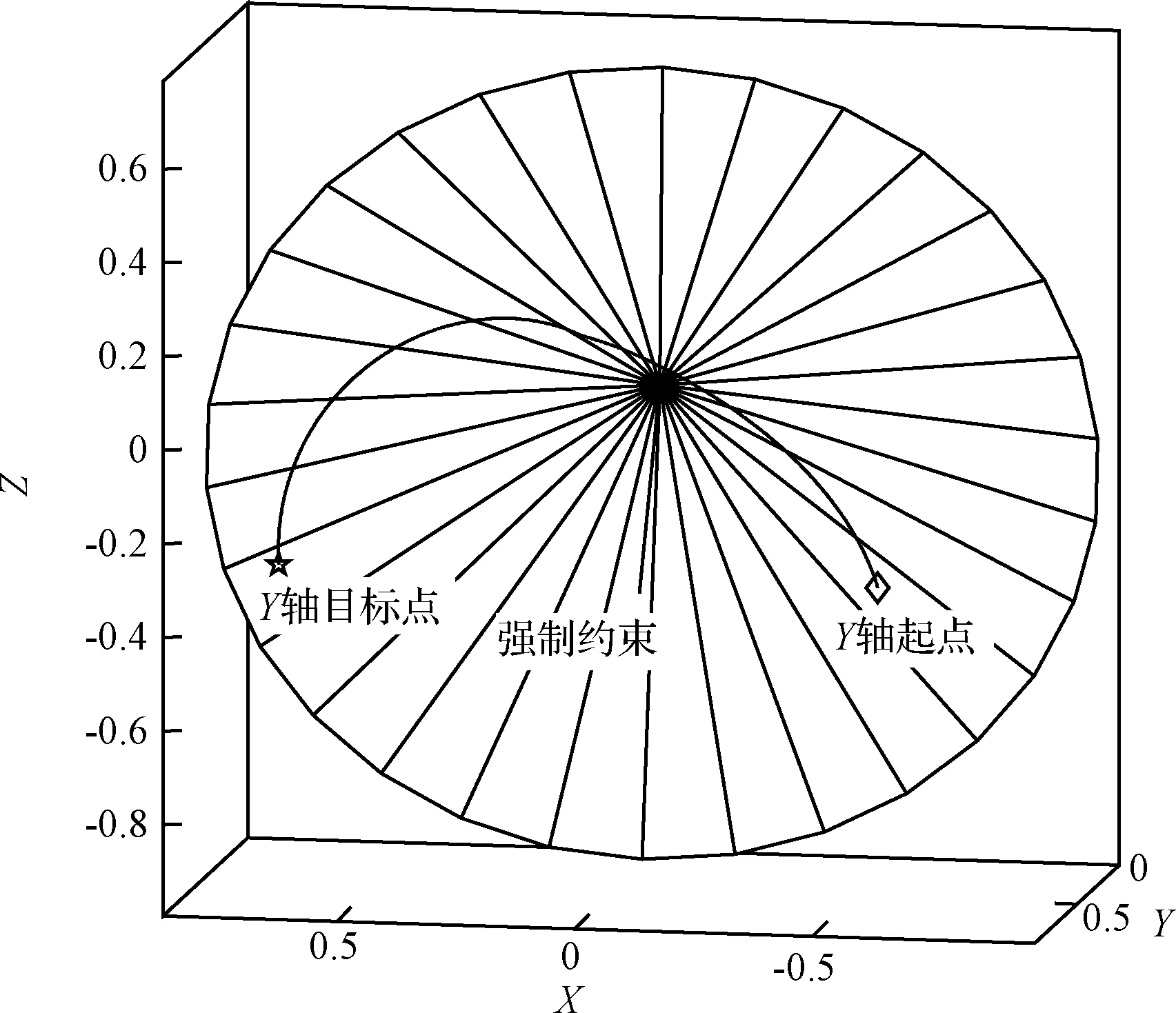
圖9 Y軸的機動軌跡
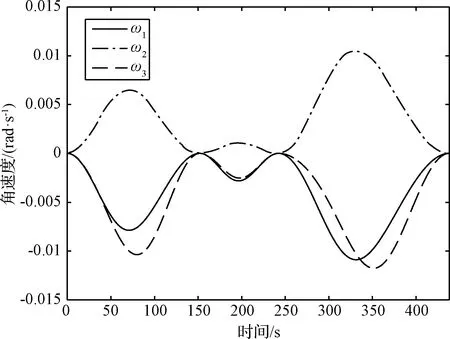
圖10 角速度曲線
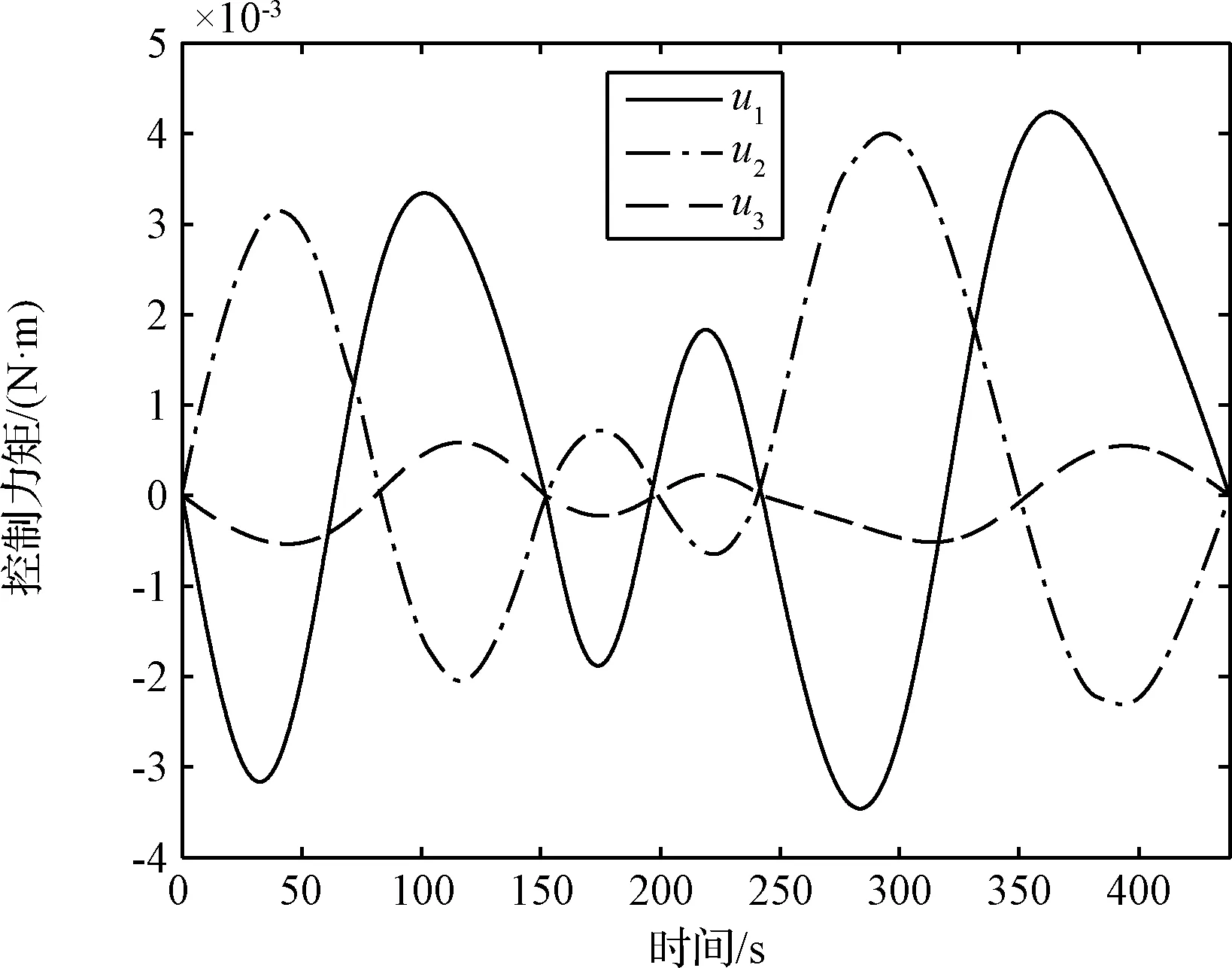
圖11 控制力矩曲線
對于非常復雜的多軸禁忌和強制約束仿真,本文方法的平均規劃時間和求得的姿態機動的能量消耗分別是7.26 s和0.0042 N2·m2·s,見表5。相同條件下,偽譜法的平均規劃時間和求得的姿態機動的能量消耗分別是30.85 s和0.0253 N2·m2·s。本文方法的規劃時間和求得的姿態機動的能量消耗比偽譜法分別減少了76%和83%。本文方法在更加復雜的多軸禁忌和強制約束下同樣可以實現低能量姿態機動的快速規劃。
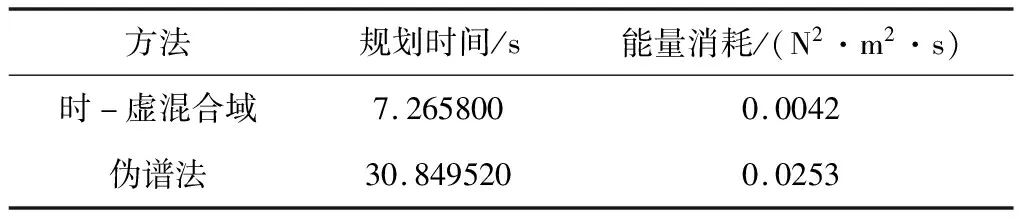
表5 時-虛混合域方法和偽譜法的規劃結果
4 結 論
針對復雜禁忌和強制約束下低能量姿態機動規劃問題,本文提出了時-虛混合域的概念和時-虛混合域單點式非線性姿態機動規劃方法。時-虛混合域建模采用虛擬域姿態機動路徑集合以及時域角速度和控制力矩。在時-虛混合域模型的基礎上,采用非線性參數優化和單點式路徑分解置換規劃方法求解問題。仿真結果表明該方法能高效地處理多種復雜約束,并且有效地減少姿態機動過程中的能量消耗,得到連續光滑的低能量姿態機動規劃結果,有利于實際工程應用。
猜你喜歡
公民與法治(2020年11期)2020-07-25 02:02:06
兒童故事畫報(2019年5期)2019-05-26 14:26:14
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
Coco薇(2016年2期)2016-03-22 02:42:52
中國工程咨詢(2016年4期)2016-02-14 07:28:28
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12