RBF神經網絡優化后的無線網絡室內定位
2020-12-07 06:14:15單超穎李權郭莉莉
現代電子技術 2020年22期
單超穎 李權 郭莉莉


摘? 要: 目前室內定位技術已經相當成熟,但是依舊存在四個方面的問題:一是支持向量機的定位性能不高;二是室內環境相對復雜;三是神經網絡的參數不夠明確;四是無線信號具有較強的時變性。針對上述問題,提出通過和聲搜索算法對RBF神經網絡進行優化的無線網絡室內定位系統。通過模糊聚類對有效訓練區進行選擇,以提高其精確性。同時,以和聲搜索算法為依據進行RBF神經網絡的參數計算,實現更加精準的室內定位。經過實驗仿真表明,該系統切實可行。
關鍵詞: 無線網絡; 室內定位; RBF神經網絡; 和聲搜索; 聚類分析; 仿真實驗
中圖分類號: TN915?34? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼: A? ? ? ? ? ? ? ? ? ? ?文章編號: 1004?373X(2020)22?0049?04
Abstract: At present, indoor positioning technology has been relatively mature, but there are still four problems: poor positioning performance of the support vector machine, relatively complex indoor environment, unclear parameters of neural network, and strong time?varying of the wireless signal. On this basis, a wireless network indoor positioning system optimized by RBF neural network by means of harmony search algorithm is proposed. The effective training area is selected by means of the fuzzy clustering to improve its accuracy. At the same time, the parameters of RBF neural network are calculated on the basis of the harmony search algorithm to achieve more accurate indoor positioning. The experiment simulation results show that the system is feasible.
Keywords: wireless network; indoor location; RBF neural network; harmony search; clustering analysis; simulation experiment
在人們生活的方方面面,基于無線網絡的定位技術被廣泛應用。與室外定位不同,由于室內環境復雜、神經網絡參數難以明確以及支持向量機無法取得良好的定位性能等原因,室內定位一直無法取得較高的精度[1]。在室內定位當中,以無線網絡為基礎的室內定位技術可以大致分為兩類:一是通過時間測距進行室內定位;二是通過對信號強度的接收進行室內定位[2]。在通過時間測距進行室內定位的定位技術當中,其室內定位的信號判別依據可以是信號的到達時間,也可以是信號到達的時間差[3]。
1? 和聲搜索算法簡述
1.1? 和聲搜索算法的原理
和聲搜索算法(HS算法)作為啟發式的全局搜索算法,通過迭代演算,選取整體最優,達到選擇目的[4]。下面將和聲搜索算法的原理依據進行簡述。首先隨機得出和聲數據庫,以此作為解空間,而后通過音調調整和隨機抽取得出對應候選解[5]。所得候選解與原有解空間當中的最差解進行比對,若候選解與最差解相比較優,則對其進行取代,并更新解空間。如此迭代搜索,直到達到整體最優的選取。
1.2? 基礎和聲搜索算法
和聲搜索算法的執行程序可以分為以下幾步。
1) 對問題參數以及算法參數進行初始化
面對實際優化問題,問題參數的上限可定義為[YU],下限可定義為[YL]。算法參數中,最大迭代次數可定義為N,HMCR為和聲記憶庫的考慮概率,HMS為和聲記憶庫的大小,也為解向量的數量,BW為音調微調的幅度,PAR為音調微調的概率。
2) 對和聲記憶庫進行初始化
解向量的數量(HMS)構成和聲記憶庫(HM),HM的公式可以表示為:
3) 得到新和聲向量
新和聲向量[y′]中,其[y′j](第j維分向量)的求取與以下三個步驟有關:音調的調整、參數在定義域內的隨機選擇以及對整體的和聲記憶庫進行考量。和聲記憶庫的考量是指在HM中第j維分量集合當中隨機選擇一個向量,并賦值給[y′j]。若HMCR滿足實際要求則對HM進行考量,進行[y′j]的賦值。此后進行音調的調整,音調調整的前提條件是PAR滿足實際需求。此過程為,在以[y′j]為圓心的小半徑區域內的搜索過程,若HMCR不滿足實際需求,則在整體取值范圍[[YjL,YjU]]中隨機選取數值并賦值于[y′j];若PAR不滿足實際需求,則不做動作。此過程中,引入rand()函數。rand函數表示在[0,1]區間內的隨機值,此均勻值的分布方式為均勻分布。BW的數值選取往往較小,同時要依據實際的情況需要進行設置。新和聲向量的求取過程的程序框圖如圖1所示。
4) 和聲記憶庫的更新
和聲記憶庫的更新主要是將所得的新和聲向量與和聲記憶庫中的最差解進行比對,根據情況進行取代,達到數據庫的更新。
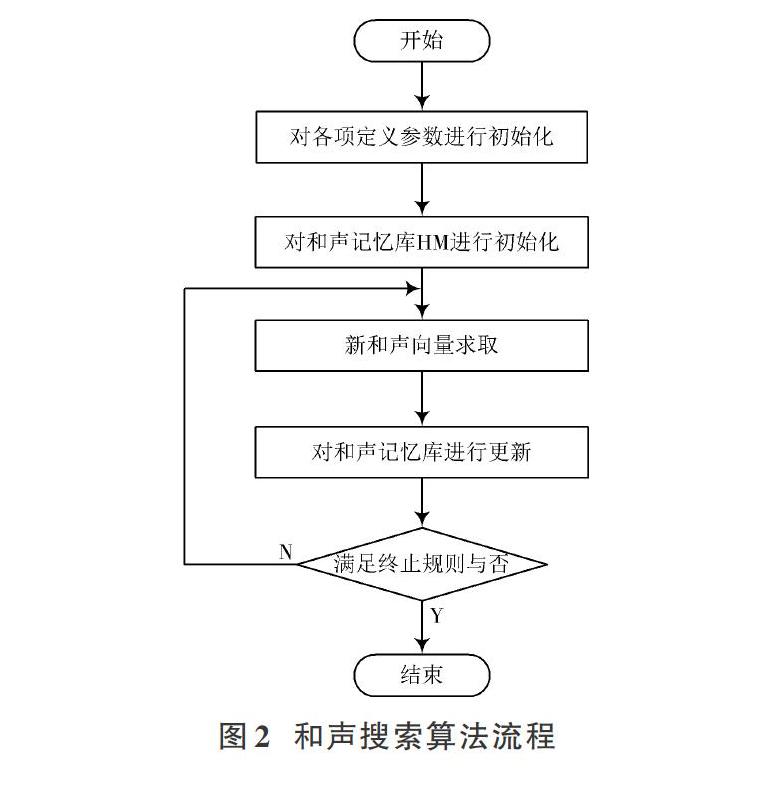
5) 終止規則的檢驗
迭代次數q達到最大迭代次數Q時,和聲搜索算法停止,迭代次數是唯一的終止規則。和聲搜索算法的整體流程如圖2所示。
2? 涉及到的相關理論簡述
2.1? 壓縮感知算法
壓縮感知算法的核心依據主要包括兩個方面:一是其采樣方法與所在稀疏空間的不相關的特性;另一方面是信號所具有的稀疏特性。信號的稀疏特性也是壓縮感知算法的運行基礎[6]。如果試驗信號不滿足稀疏要求,需要對其進行變換。具體算法當中,原始信號用變量x表示[x=i=1Nqiφi,x∈CN],同時,對原始信號進行變化,得到向量q(q=[φTx]),當向量的非零系數有有限個時,則此向量在變化之后能夠進行稀疏表示。有限個非零系數的個數K為詞向量的稀疏度,[φ]為[N×N]階的稀疏矩陣。同時,設y為維數為M的觀測信號,[x′i]的維數為N,二者構成[M×N]階的測量矩陣,用[μ]表示。若滿足[y=μx],且[K log2NK≤M,θ=μφ],則信號模型與對應的測量矩陣不具備關聯性,但是滿足對應的信號重構的條件。信號重構的過程是信號x在y中得以恢復的過程。首先應當對變換后的向量q做出求解計算,而后做出進一步的信號恢復[7]。壓縮感知算法的具體工作原理如圖3所示。
2.2? 模糊聚類算法
模糊聚類算法的算法過程如下。
整體樣本集合設為[N=y1,y2,…,yn],集合任意向量[yp=yp1,yp2,…,ypn],n為向量維數,聚類后數據劃分的子類數量為N,第q個聚類中心可記作[Sq=Sq1,Sq2,…Sqn],其中n=1,2,…,N。隸屬度[Uqp]為第q個聚類中心點與第p點的隸屬度,隸屬度以及聚類中心的矩陣可以記為[μqp]。依據以上參量,對各聚類之間的樣本依附性進行計算,同時計算其各聚類之間的整體相似度,并得出整體樣本的模糊等階矩陣。而后進行模糊聚類,并得出最優解。
2.3? 徑向基神經網絡
徑向基(RBF)神經網絡為三層結構,包含隱含層、輸入層以及輸出層[8]。在RBF神經網絡當中,輸入層達隱含層的變化過程為非線性,隱含層達輸出層的變化過程為線性。其基本思想是通過輸入層矢量到隱含層的直接映射,確定映射關系,同時通過隱含層對輸出層的線性映射,達到更好的數據學習目的。RBF神經網絡結構如圖4所示。
2.4? 和聲搜索算法優化后的RBF神經網絡
和聲搜索算法以和聲音樂演奏為啟發,對RBF網絡進行優化。通過隨機選取和變量微調,對已有的記憶方案進行迭代的最優化調整,達到最優解的選取目的。在這一過程當中,問題所需的決策變量可用樂器j(j=1,2,…,N)來表示,解向量可用和聲[Hi](i=1,2,…,M)來表示。借助和聲搜索算法,RBF神經網絡所需要求解的三個參數能夠得到更好的求解[9]。具體方法如下:
1) 對基于無線網絡的室內定位進行采集,組成初始樣本集合,具體劃分為預測集合以及訓練集合。
2) 對當前情況下室內定位的誤差進行記錄,在算法優化當中,將此作為目標函數。
3) 對和聲搜索算法需要進行優化的各項參數進行初始化。
4) 通過訓練集合進行RBF神經網絡的學習,產生新和聲向量,同時對此向量做出評測。
5) 新和聲向量與最優和聲向量進行比對,若新和聲向量較優,則做出替代。
6) 繼續進行迭代,若迭代次數滿足最大迭代次數,則停止;否則,執行步驟4)。
7) 得出最優和聲向量,求取最優RBF神經網絡相關的三個參數,完成室內定位模型的建立。其程序如圖5所示。
3? 優化后室內定位模型的建立
基于和聲搜索算法對RBF神經網絡進行優化的室內定位系統的建立,分為3步:
1) 進行信號重構,以壓縮感知算法為依據;
2) 將樣本數據進行聚類分析,以模糊聚類算法為依據;
3) 通過和聲搜索算法對RBF神經網絡優化,完成室內定位系統的建立[10]。整體的流程如圖6所示。
基于和聲搜索算法優化后的RBF神經網絡定位模型的運行流程如下:
1) 室內定位當中,其處在各位置的信號強度用變量x表示,若該點未經采集,則進行錄入;否則,刪除對應點。
2) 依據已得信息,進行觀測矩陣的建立。
3) 通過壓縮感知算法對采集數據進行信號重構。
4) 對重構后的信號通過模糊聚類算法進行聚類分析。
5) 通過RBF神經網絡進行學習和結果選取,并借助和聲搜索算法進行結果優化,實現更為精準的基于無線網絡的室內定位。
4? 實驗結果以及分析
4.1? 實驗環境簡述
為檢驗研究成果,選取普通住所作為實驗的實踐環境。普通住所的平面結構圖如圖7所示。無線檢測信號為WiFi,移動終端使用手機,各位置樣本采集量為100,信號的采樣時間設置為2 s,定位模型交互環境使用Matlab 2015b。
4.2? 結果以及分析
選擇當下較為經典的K最近鄰算法以及原有的RBF神經網絡進行橫向比對。同一位置各算法的定位誤差如圖8所示。
由圖8對比發現,通過和聲搜索算法優化后的RBF神經網絡與其他兩種算法相比具備更精確的室內定位效果。這與優化后的RBF神經網絡能夠獲取充分的WiFi信號信息以及其優化能力有很大的關系。其中,RBF神經網絡具備優于K最近鄰算法的定位精度,這主要是由于RBF神經網絡相較之下具備更好的學習能力。圖9為不同參考位置以及不同算法的誤差對比。
由圖9可知,在不同相鄰參照位置距離之下,通過和聲搜索算法優化的RBF神經網絡總體來說定位精度更高,相對收斂程度更好。通過實踐結果分析,經和聲搜索算法優化后的RBF神經網絡具備更為優越的室內定位性能。
5? 結? 語
為了解決當前基于無線網絡的室內定位當中的固有問題,對通過和聲搜索算法優化RBF神經網絡的室內定位系統進行研究和實踐。此過程中,整體數據樣本的預處理借助壓縮采樣和模糊聚類,起到了減少樣本數據采集、加快訓練速度的作用。而后,借助和聲搜索算法,對RBF神經網絡的參數求取進行優化,在更大程度上提高了室內定位系統的精確性。結果表明,所提方法切實可行,能夠起到更好的以無線網絡為基礎的室內定位效果。
參考文獻
[1] BOURNE D W A. Mathematical modeling of pharmacokinetic data [M]. Florida: CRC Press, 2018.
[2] KADRI R L, BOCTOR F F. An efficient genetic algorithm to solve the resource?constrained project with trans?fer times: the single mode case [J]. European journal of operational research, 2018(2): 459?461.
[3] BATES J, THE I, MCCLYMONT D, et al. Monte Carlo simulations of diffusion weighted MRI in myocardium: validation and sensitivity analysis [J]. IEEE transactions on medical imaging, 2017, 36(6): 1316?1321.
[4] 李華亮,錢志鴻,田洪亮.基于核函數特征提取的室內定位模型研究[J].通信學報,2017,38(1):159?166.
(上接第52頁)
[5] OUYANG H, GAO L, LI S, et al. Improved global?best?guided particle swarm optimization with learning operation for global optimization problems [J]. Applied soft computing, 2017, 52: 992?1005.
[6] LI X Y, QIN K, ZENG B, et al. A dynamic parameter controlled harmony search algorithm for assembly sequence planning [J]. The international journal of advanced manufacturing technology, 2017, 92(9/12): 3400?3409.
[7] GUO Z, WANG S W, YUE X Z, et al. Global harmony search with generalized opposition?based learning [J]. Soft computing, 2017, 21(8): 2130?2137.
[8] 趙新超,劉朝華.一種融入差分變異的變規模和聲搜索算法[J].集美大學學報(自然版),2017,22(4):58?67.
[9] BASTUG E, BENNIS M, MEDARD M, et al. Toward interconnected virtual reality: opportunities, challenges, and enablers [J]. IEEE communications magazine, 2017, 55(6): 110?117.
[10] 雍龍泉,拓守恒,史加榮.約束處理技術及應用[J].計算機科學與探索,2018,12(6):1015?1020.
