上面級發射MEO軌道設計及運載能力優化研究
2020-12-09 09:43:58王傳魁張利賓鄭莉莉陳佳曄周文勇
宇航總體技術 2020年6期
關鍵詞:優化
王傳魁,焉 彬,張利賓,鄭莉莉,陳佳曄,周文勇,陳 益
(北京宇航系統工程研究所,北京 100076)
0 引言
運載火箭可以較容易地直接將衛星送入LEO(Low Earth Orbit)、SSO(Sun-Synchronous Orbit)等低地球軌道,但對于高度在10 000 km以上的中高軌道,受運載火箭末級多起啟動能力的限制,一般無法采用直接入軌的方式進行發射。以往進行中高軌道衛星發射時,一般采用間接入軌的方式,由衛星在遠地點開展一次或數次變軌機動進入最終軌道。上面級的出現進一步提升中高軌道衛星的發射能力,可以將衛星直接送入中地球軌道(Medium Earth Orbit,MEO)和地球靜止軌道等中高軌道[1]。
中地球軌道MEO主要用于導航衛星星座軌道,例如美國的GPS導航星座、俄羅斯的GLONASS導航星座、歐洲的Galileo導航星座和我國的北斗導航星座等。為避開地球輻射帶,增大覆蓋范圍,減少衛星數量,MEO軌道一般選擇高度位于20 000~24 000 km、軌道傾角在55°~65°的圓軌道[2]。
我國設計的導航星座中,工作在MEO軌道的導航衛星不少于24顆[3],其工作軌道高度約為21 500 km,軌道傾角為55°。為加快全球衛星導航系統的建設,盡快提供導航服務,我國導航衛星組網階段,MEO衛星均采用上面級以一箭雙星直接入軌的方式進行發射,上面級可以將衛星送入約22 000 km高度的組網調相軌道,衛星分離后自主調相至各自的工作相位,以便盡快完成星座部署任務。為提升發射軌道運載能力,將更多的導航衛星有效載荷送入MEO軌道,需要開展發射軌道運載能力優化研究,這對加快北斗衛星導航系統組網進程、高效完成北斗衛星導航系統工程建設具有重要意義[4]。
酈蘇丹等[5]以區域目標覆蓋性能為優化指標,采用多目標進化NSGA-Ⅱ算法對較低的MEO軌道進行優化,得到5顆MEO橢圓軌道衛星星座方案。蒙波等[6]以導航星座性能PDOP和簡化計算的衛星生產成本為目標,采用多目標PSO優化算法對導航星座軌道面個數、衛星總數量、星座軌道相位因子以及軌道傾角等參數進行了優化。趙雙等[7]以導航星座失效為背景,提出發射快速相應衛星進行星座重構的方法,并以重構后星座對目標區域的平均 GDOP值和相應時間為目標,采用多目標進化NSGA-II算法對衛星數量、發射點位置以及衛星入軌半長軸、軌道傾角和升交點赤經進行了優化。
以上研究均針對導航組網星座衛星軌道進行了優化,實現了星座優化的效果,但尚未開展對運載火箭或上面級發射導航衛星MEO軌道設計及優化方法研究。本文從上面級兩次變軌直接入軌發射MEO軌道設計方法為切入點,建立軌道動力學模型和迭代計算模型,分析影響發射軌道運載能力的可變因素,應用自適應遺傳算法進行優化,以期獲得發射軌道優化和運載能力提升。
1 軌道設計方法
1.1 發射軌道方案概述
上面級直接入軌發射中高軌道衛星一般采用兩次變軌方案,上面級衛星組合體與基礎級火箭分離后進入停泊軌道,上面級在停泊軌道完成姿態穩定等動作后主發動機點進行第一次變軌,通過上面級主發動機工作,加速抬高停泊軌道遠地點高度使得組合體進入MEO轉移軌道(簡稱MTO軌道)。第二次變軌在MTO軌道遠地點進行,目的是抬高軌道近地點以圓化軌道,并修正軌道傾角,最終將衛星送入目標軌道,變軌示意如圖1所示。
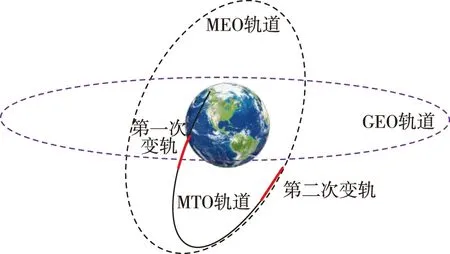
圖1 飛行軌道示意圖Fig.1 Schematic figure of orbit
1.2 動力學方程
建立在慣性坐標系下的上面級軌道動力學方程可寫為如下微分方程的形式
(1)
式中,x,y,z為上面級位置矢量在地心赤道慣性坐標系下的分量,vx,vy,vz為上面級速度矢量在慣性系下的分量,Fx,Fy,Fz為上面級所受合外力F在慣性系下的分量。上面級所受合外力F
F=FT+FE+FA
(2)
式中,FT為上面級主發動機推力,FE為衛星受到的地球引力,FA為高空大氣阻力。
1.3 變軌段推力方向設計
結合筆者前期研究成果及方法[8],變軌段推力方向主要為上面級體系相對軌道系的俯仰角φ、偏航角ψ、滾動角γ的設計,因上面級變軌發動機一般安裝于本體X軸向,滾動角對推力方向不產生影響,為簡化計算γ按照0°進行計算。因此,變軌段推力方向主要為相對軌道系俯仰角φ和偏航角ψ的設計。為使得變軌發動機盡可能沿速度方向加速,提供最大加速效果,將軌道系俯仰角φ和偏航角ψ按照0°進行設計,考慮到軌道機動還需要修正軌道偏心率和傾角傾角,附加俯仰和偏航小幅修正量δφ和δψ。
1.4 軌道迭代計算
軌道設計采用調整第一次變軌主發動機工作時間t1、第二次變軌主發動機點火時刻t2、第二次變軌主發動機工作時長t3、軌道系俯仰角修正量δφ、軌道系偏航角修正量δψ來最終滿足衛星軌道參數,計算上面級第一次變軌后軌道遠地點高度Ha1,衛星分離后的彈道傾角Oa、軌道半長軸a、偏心率e、軌道傾角i,采用牛頓迭代算法進行求解,迭代關系式為
(3)
判斷上面級第一次變軌軌道遠地點高度和衛星入軌參數是否滿足如下條件
(4)
上面級第一次變軌后軌道參數主要為軌道遠地點高度:Ha1為當前軌道計算MTO軌道遠地點高度,Ha1T為上面級第一次變軌結束后的軌道遠地點高度目標值(針對中高軌發射任務,一般取值比衛星要求軌道高度高約150 km),Ha1eps為迭代控制精度(一般取0.01 m)。
衛星入軌參數包括:入軌點當地彈道傾角Oa、軌道半長軸a、軌道偏心率e、軌道傾角i。Oa為當前軌道計算衛星入軌當地彈道傾角;a當前軌道計算時刻衛星入軌軌道半長軸值,aT為衛星要求發射軌道半長軸值,aeps為衛星發射軌道半長軸控制精度(一般取0.01 m);e為當前軌道計算衛星入軌軌道偏心率;i當前軌道計算時刻衛星入軌軌道傾角,iT為衛星發射軌道的軌道傾角值,ieps為衛星發射軌道傾角控制精度(一般取1×10-5)。其中,Ha1為t1的函數,Oa為t2的函數,a為t3的函數,e為δφ的函數,i為δψ的函數。
2 軌道優化策略分析
2.1 軌道接力能量分配優化
運載火箭三子級采用氫氧低溫發動機,相對于上面級來說其優點是比沖高、推力大,適合快速為航天器軌道提速。但因三子級規模較大,將其和上面級組合體一起送入更高的軌道需要更多的燃料。上面級采用常規液體發動機,相對于火箭三子級其比沖稍低、推力較小,但三子級分離后其規模變小,變軌靈活性提升。因此,上面級與基礎級火箭交接班軌道條件,特別是過渡軌道遠地點高度存在最優解。
2.2 機動段推力方向優化
衛星等航天器一般采用固定姿態推力慣性定向的方式進行變軌段推力方向設計,運載末級火箭一般采用沿飛行軌道速度方向或者線性化飛行程序角的方式進行軌道機動。上面級第一次變軌也可以采用沿速度方向加速,但上面級攜帶的燃料主要用于第二次變軌,為優化上面級第二次推力方向,避免產生不利方向速度增量增加燃料消耗,上面級第二次變軌段俯仰角采用二次曲線擬合的方式進行優化調整,因基礎級火箭直接將上面級組合體送入傾角55°傾角的停泊軌道,用來修正衛星入軌軌道傾角的偏航角數值為小量,優化空間不大。因此,采用優化第二次變軌俯仰角二次曲線中間點的時間和角度值進行優化。
2.3 MTO軌道遠地點高度優化
為最大程度地擬合霍曼變軌,上面級第二次變軌段飛行高度也會影響燃料的消耗,上面級采用在MTO軌道遠地點附近進行第二次軌道機動的方案,因此MTO軌道遠地點高度,即對應第一次變軌結束后的遠地點高度,也需要進行優化。
3 優化方法及模型
3.1 優化算法選擇
遺傳算法是一種借鑒生物界自然選擇和遺傳機制發展起來的隨機搜索優化算法,基于適者生存的原則,通過模擬自然進化在種群內的優勝劣汰實現對最優解的搜索[9]。遺傳算法提供了一種求解復雜系統優化問題的通用框架,它不依賴于問題的具體領域,廣泛應用于多種學科領域。
基于遺傳算法的全局搜索能力,本文將遺傳算法應用于上面級發射MEO軌道優化設計,建立目標函數與遺傳算法適應度函數的關系,在全局范圍內搜索發射軌道優化變量參數的最優解。在影響軌道設計結果參數變量范圍內,隨機產生初始種群開始最優解迭代搜索,對種群中的個體進行適應度計算,以最大適應度為標準,更新最優適應度和最優染色體,通過選擇、交叉和變異等遺傳操作生成下一代種群,進行當前種群的個體適應度計算。重復上述步驟,直至找到最優解為止。關于遺傳算法的詳細操作流程已有研究較多[10],這里不再贅述。
3.2 軌道優化模型
本文的優化目標選為上面級與衛星組合體進入MEO軌道的質量最大,因最優化問題一般求最小值,所以采用固定質量常數對入軌質量做差,其優化數學模型可以表示為
minJ=MC-M
(5)
式中,MC>0為質量常數,一般取5 000 kg;M>0為上面級和衛星組合體進入MEO軌道后的剩余質量。
根據前文分析,優化變量分別為:運載火箭發射上面級進入停泊軌道遠地點高度Ha0、上面級第一次變軌目標軌道遠地點高度Ha1、上面級第二次變軌段主發動機工作推力方向二次曲線擬合點時間Tmid及對應的俯仰角?mid。使用遺傳算法在各變量的取值范圍內搜索最優值,在指定的進化代數內,各變量收斂后即可認為找到最優解。
4 仿真算例分析
4.1 仿真計算初始條件
根據我國長征三號乙運載火箭改進型[11],標準地球同步轉移軌道運載能力估算MTO軌道運載能力范圍。因此,假設仿真計算采用的火箭上面級主要原始參數如表1所示。初始仿真計算假定按照基礎級火箭將上面級送入遠地點高度為20 000 km的停泊軌道,停泊軌道主要軌道參數如表2所示,其中近地點幅角和升交點赤經這兩項軌道參數的理論取值對MEO軌道運載能力不產生影響,可以隨機選取,不再列出。
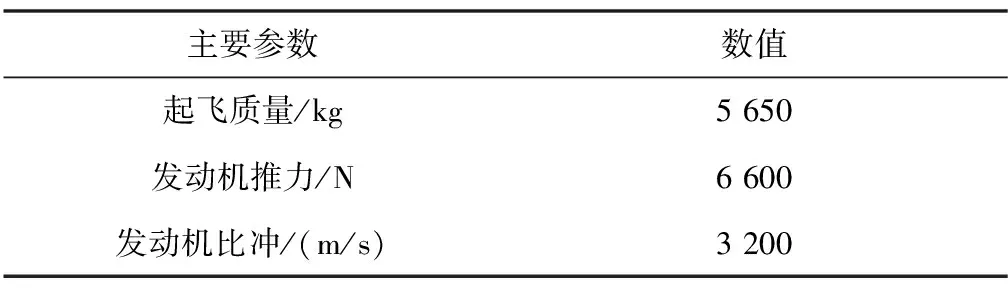
表1 上面級主要性能參數
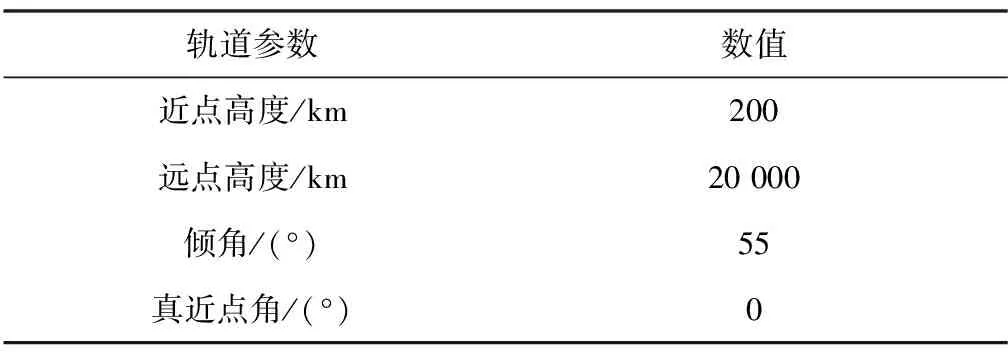
表2 上面級主要初始軌道參數
4.2 仿真計算結果
根據4.1擬定的初始參數條件,按照1.4節軌道迭代計算方法,一般設定上面級第一次變軌遠地點高度目標值為22 150 km,衛星入軌半長軸為28 378.14 km,開展上面級發射MEO軌道迭代計算,計算結果主要參數如表3所示。結果顯示,上面級攜帶衛星組合體最終進入22 000 km高度、55°軌道傾角的圓軌道,計算入軌剩余質量為M0,優化后入軌質量結果采用適應度值進行計算,即適應度值等于優化計算后入軌質量除以M0。

表3 上面級衛星組合體進入MEO軌道后主要軌道參數
4.3 遺傳算法優化結果
設置優化計算種群規模為60,最大進化代數為50,交叉率0.8,變異率0.1。參考上述初始計算結果,設定上面級組合體初始停泊軌道遠地點高度Ha0的取值范圍18 000~21 000 km,并對應估算CZ-3B運載火箭運載能力范圍5 800~5 575 kg,在Ha0的取值范圍內,假設火箭運載能力小范圍內符合線性化規律;設定上面級第一次變軌目標軌道遠地點高度Ha1的取值范圍22 000~22 200 km;設定上面級第二次變軌段主發動機工作推力方向二次曲線擬合點時間Tmid的取值范圍200~450 s,對應點的俯仰角?mid取值范圍-10°~10°。遺傳進化50代后各變量參數變化如圖2所示,目標適應度變化情況如圖3所示。
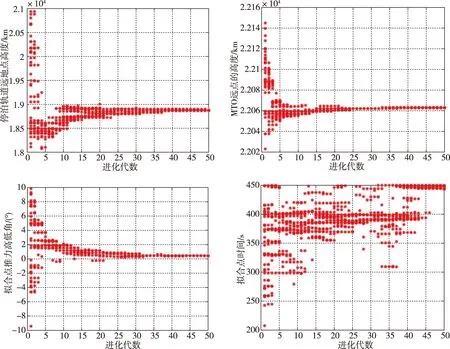
圖2 進化50代后種群參數變化示意圖Fig.2 Schematic of population variable parameters after fifty generations of evolution
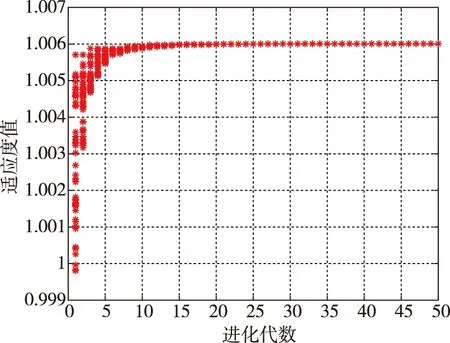
圖3 進化50代后種群優化目標適應度值分布圖Fig.3 Distribution of population objectives fitness value after fifty generations of evolution
由圖2、圖3可見,經過遺傳算法進化計算,在15代以后適應度值收斂至最大值約1.006;經過約38代,上面級組合體初始停泊軌道遠地點高度Ha0收斂于18 880 km附近;經過約25代,上面級第一次變軌目標軌道遠地點高度Ha1基本收斂于22 063 km附近;經過約32代,上面級第二次變軌段軌道系下俯仰角二次曲線擬合點俯仰角?mid基本收斂于0.4°附近;上面級第二次變軌段軌道系下俯仰角二次曲線擬合點時間Tmid收斂性差,因整個變軌段?mid基本接近于0,Tmid的取值對結果影響較小。因此,經遺傳算法優化后,運載能力提升約6‰。取進化50代后的最優解,上面級第二次變軌段軌道系下俯仰角和偏航角對比曲線如圖4和圖5所示。可以看出,優化后俯仰角變化為曲線形式并且數值更接近于0,推力方向與飛行軌道方向基本一致;優化前后偏航角差別較小,均約為-0.017°的小量。
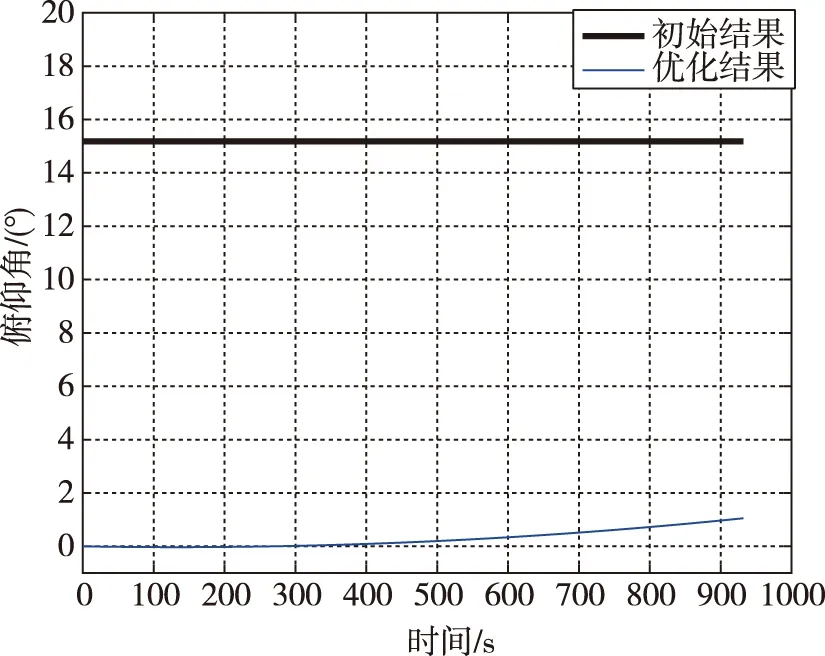
圖4 優化前后上面級變軌段俯仰角變化曲線對比圖Fig.4 Comparison of pitch angle curves of upper stage maneuver phase before and after optimization
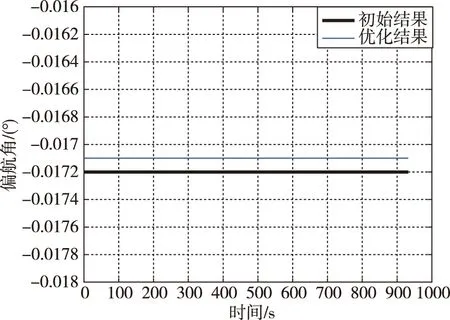
圖5 優化前后軌道系下偏航角變化曲線對比圖Fig.5 Comparison of yaw angle curves of upper stage maneuver phase before and after optimization
5 結論
針對采用火箭上面級直接入軌發射導航衛星MEO軌道任務研究需求,建立軌道動力學和變軌迭代計算模型,分析軌道優化的可能因素,采用自適應遺傳算法對發射軌道進行優化,最后采用數值仿真對本文所采用的軌道設計和優化方法進行驗證。結果顯示,上面級直接入軌發射MEO軌道設計方法正確,能夠準確將衛星送入目標軌道;軌道優化方法有效,能夠小幅提升運載能力,實現優化設計的目的。本文為基于軌道與優化方法的理論分析,工程實際中還需要考慮基礎級三子級承載變化引起的結構加強增重、載荷支架質量變化等因素對運載能力的影響。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45