基于升船機實船試驗的船舶吃水標準影響因素分析
2020-12-09 07:43:38孫志峰
水道港口 2020年5期
王 新,孫志峰
(1.南京水利科學研究院 通航建筑物建設技術交通行業重點實驗室,南京 210029;2.中國長江三峽集團有限公司,北京 100038)
近幾年,我國多座大型升船機陸續建成投運,在升船機建設方面取得了舉世矚目的成就。在升船機投運后如何安全高效發揮其通航效益,是運行管理單位面臨的重要任務。升船機船廂空中運行階段通常流程簡單、平穩順暢,而船廂對接、船舶進出廂階段較為復雜,影響因素眾多[1]。船舶進出船廂本身就屬于限制性淺水航道的復雜問題,加之我國大型升船機均建于西部山區河流,具有水位變幅大、變率快的特點,升船機船廂對接運行中的水動力學難題遠超國外建于運河上的升船機。因此,船舶進出廂水動力學問題是升船機運行安全核心問題之一[2]。
船舶進出船廂風險主要體現在船舶觸底、撞擊船廂等安全事故[3],為避免船舶進出廂過程中發生觸底,在船廂水深一定的情況下,需要合理分配船舶吃水和富裕水深,確定最小富裕水深即確定了船舶最大吃水。船舶富裕水深與船廂水深、船舶吃水、船型、航速、水位波動等諸多因素有關[4],在升船機設計階段,代表性船舶確定后,主要通過物理模型試驗,論證船廂有效水深和船舶航行技術要求[5-6],通常會充分考慮各種影響因素及一定的安全系數,以保證充足的富裕水深,這也給升船機建成投運后船舶吃水標準提升留有空間。從已經投運的多座大型升船機運行情況看,如500 t級的景洪、思林、沙沱,1 000 t級的向家壩升船機等,設計船型與實際船型均存在較大差異[7],導致通航船舶與升船機船廂不匹配,船舶在設計容許吃水條件下裝載量嚴重偏低,航運效益和升船機通過能力受到很大影響。因此,地方航務管理部門和船民殷切期盼,在保證升船機通航安全的前提下,進一步提升船舶的吃水控制標準。近期,景洪、向家壩、思林、沙沱等多座升船機陸續開展了船舶進出船廂實船試驗,論證了船舶吃水提升的可行性。本文基于多座升船機船舶進出船廂實船試驗,重點剖析了船舶吃水控制標準的主要影響因素、船舶下沉量預測公式、原型觀測與模型試驗的主要差異,對升船機船廂尺度設計、通過能力挖潛均有一定的參考意義。
1 船廂水深設計與船舶吃水控制
1.1 船廂水深設計依據
水深吃水比h/T是船閘門檻水深和升船機船廂水深設計的一個重要參數。我國《船閘設計規范》(JTJ261-266,1987)中規定,門檻水深應滿足h/T≥1.5,其中,h為門檻水深,m;T為設計最大船隊(舶)的滿載吃水。從我國船型的多樣性、未來船舶的大型化發展、減小船舶的航行阻力、提高船閘的適應性等多方面綜合考慮,在《船閘總體設計規范》(JTJ305-2001)中,將門檻水深條件改為h/T≥1.6,要求稍作提高,并一直沿用至今[8]。美國陸軍工程師團出版的《Hydraulic Design of Navigation Locks》指出:在選擇門檻水深時需要考慮安全和經濟因素,安全起見門檻水深吃水比不應小于1.5[9]。
我國《升船機設計規范》(SL660-2013,GB51177-2016)中,規定船廂水深計算公式
h=T+△H
(1)
式中:h為承船廂有效水深,m;T為設計最大船舶滿載時的吃水深度,m;△H為富裕水深,可取0.25~0.4T。可以看出,升船機設計規范規定的h/T=1.25~1.4,比船閘門檻水深設計的要求放寬較多。
1.2 船舶吃水控制現狀
由于我國《升船機設計規范》實施較晚,近年建成投運的一批大型垂直升船機船廂水深設計主要參照船閘設計規范,并結合模型試驗成果確定。部分升船機船廂有效水域、吃水設計、允許航速見表1,可以看出,h/T基本按1.5~1.6控制,相對于規范1.25~1.4要求有一定的富裕度。
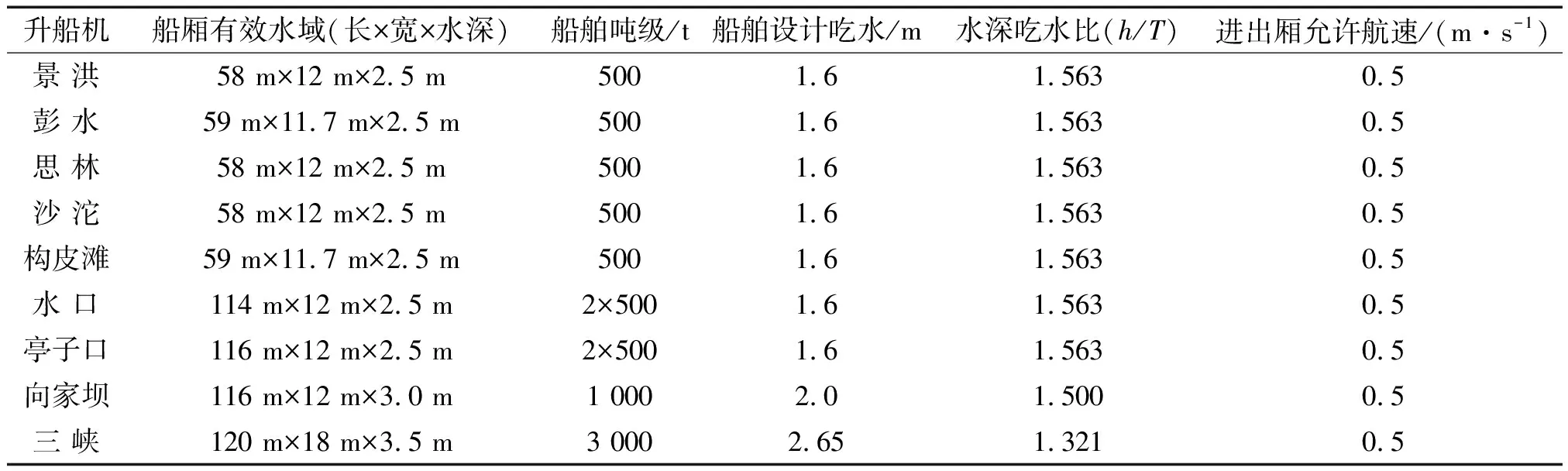
表1 我國部分大型垂直升船機參數Tab.1 Parameters of some large vertical ship lifts in China
受多種綜合因素影響,升船機建成后實際通航船舶與設計船舶存在較大差異,尤其在吃水控制標準上矛盾突出。實際500 t級船舶滿載吃水達到2.0 m,1 000 t級船舶滿載吃水達到2.6~2.7 m,船舶通過升船機,其吃水應按設計要求控制,若500 t級船舶按設計要求的1.6 m吃水、1 000 t級船舶按2.0 m吃水裝載,則裝載率僅50%~60%,航運效益受到很大影響,升船機的通過能力也很難達到設計要求,因此,針對建成的升船機,開展船舶吃水控制標準和通過能力提升研究具有重要意義。
2 船舶吃水控制標準影響因素分析
船舶吃水控制標準決定于航道水深和富裕水深,在航道水深條件一定的情況,富裕水深就直接決定了船舶吃水標準,如公式(1)所示。國內外在船舶進出港口富裕水深方面開展了大量的研究工作,對船舶富裕水深影響因素有較為明確的認識。然而,船舶進出升船機船廂過程有其獨特性,需要進行專門的研究分析。
圖1 船舶富裕水深組成示意圖Fig.1 Components of ship underkeel clearance
根據景洪、三峽、向家壩、思林、沙沱等多座升船機的實船試驗成果,從升船機實際運行角度,對船舶進出升船機船廂過程的富裕水深進行詳細分解,如圖1所示,富裕水深ΔH包括式(2)幾個組成部分,分別對應船廂水面波動、對接水位差、引航道水位變化、船舶航行下沉量和不觸底安全水深幾個主要影響因素。
ΔH=ΔHW+δH+δW+δ+ΔHS
(2)
式中:ΔHW為水面半波動;δH為船廂對接水位差;δW為引航道水位變化;δ為船舶航行下沉量;ΔHS為不觸底的安全水深。
結合多個升船機工程實船試驗觀測資料,對船舶吃水控制的主要影響因素進行詳細的分析闡述。
(1)水面半波動ΔHW。
船廂對接、船舶進出廂過程中的水面波動是一個十分復雜的影響因素,存在多種不同類型或周期的波動及疊加,引起船舶上下升沉。水面波動主要包括船廂臥倒門啟閉產生的水面波動、船舶進出廂引起的推移波、泄洪引起的水面短周期波動、相鄰船閘充泄水引起的長周期波動等。以思林升船機為例,船廂對接、船舶出廂過程水面波動、航速及下沉量過程線見圖2,可以看出,臥倒門開啟對水面造成明顯的擾動,形成周期為120 s(臥倒門2 min開啟)的波動,該波動造成船舶尚未啟動的情況下上下升沉約±4 cm;船舶啟動加速出廂過程中,形成了明顯的周期較短的推進波,船舶上下升沉波動約±8 cm。三峽船閘在上游低庫水位運行時,充水過程會產生明顯的長周期波動,對相鄰的三峽升船機對接產生很大影響,船廂水深最大降低約40 cm,船舶進出廂存在較大安全風險。
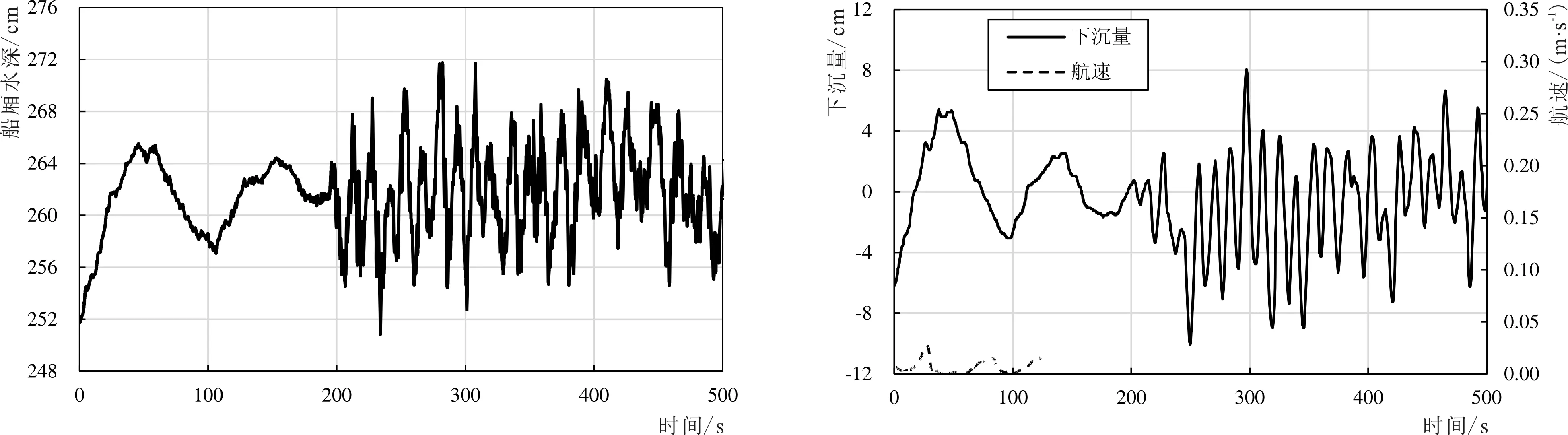
2-a 船廂水面波動2-b 航速與下沉量圖2 思林升船機船舶出廂水面波動及下沉量Fig.2 Water level fluctuation and ship sinkage in Silin shiplift
(2)對接水位差δH。
升船機船廂與上下游引航道對接時,容許的內外水位差一般為±10 cm,以船舶標準水深3.0 m為例,即對接后船廂的水深理論上可能為2.9~3.1 m的任意值。圖3為向家壩升船機下游對接、船舶出廂過程的水面波動、船舶航速及下沉量過程線,可以看出,臥倒門開啟對接,除產生明顯的水面波動外,船廂水深由307 cm整體降低到302 cm左右,減少約5 cm,在船舶尚未啟動的情況下,船舶整體隨水面下降了5 cm,即由對接水位差引起。對接水位差直接影響船廂的有效水深和船舶進出廂的富裕水深。
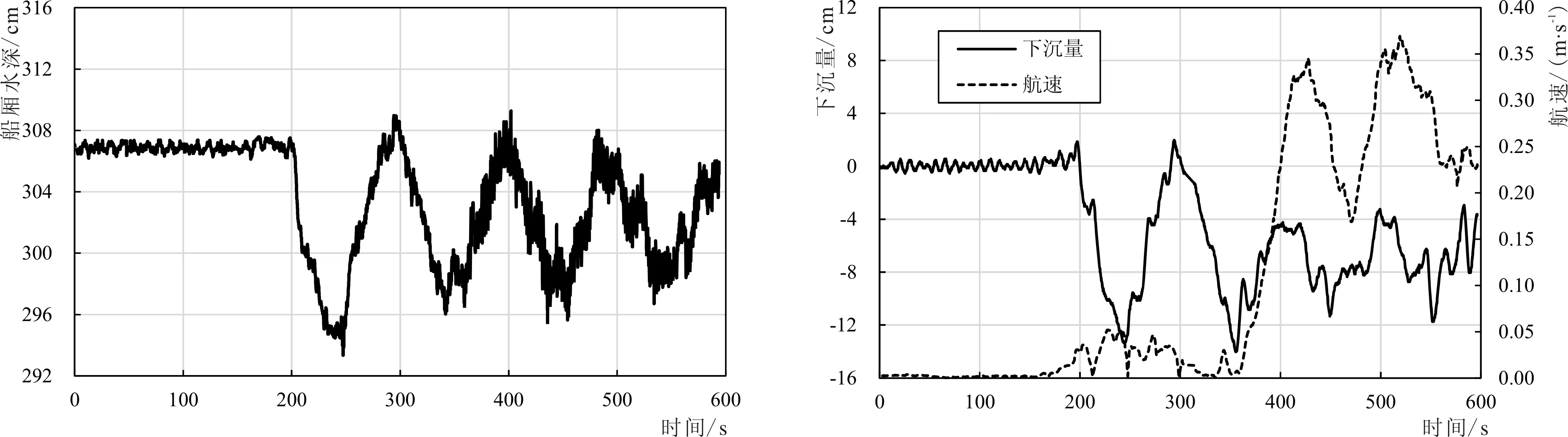
3-a 船廂水面波動3-b 航速與下沉量圖3 向家壩升船機船舶出廂水面波動及下沉量Fig.3 Water level fluctuation and ship sinkage in Xiangjiaba shiplift
(3)引航道水位變化δW。
在升船機船廂對接過程中,入庫流量或出庫流量變化會引起上下游引航道水位持續變化,進而造成船廂水深變化,水位的不穩定不僅給升船機對接造成較大的困難,而且增大了船舶進出船廂過程中船舶發生觸底的風險,因此,上下游水位條件是我國大型升船機安全高效運行的重要影響因素。然而,我國大型升船機均建于山區河流,較小的流量變化即可能引起明顯的水位變化,船舶進出船廂過程中水位快速變化問題及應對是升船機運行中需要重點關注和妥善解決的問題。思林、沙沱升船機運行調度規程規定,在船廂對接過程中,當船廂水位與引航道水位差≥15 cm時,應進行應急處置,盡快解除對接。圖4為沙沱升船機船舶下游進廂過程航速與下沉量變化,可以看出,在船舶停靠在下游靠船墩尚未啟動進廂的情況下,受水位影響,船舶高度在緩慢下降,在觀測的十多分鐘內,下游水位約降低了4 cm。向家壩水電站機組每日調峰期間下游水位最大小時變幅近1 m,為此,升船機下游增設了輔助閘室,成功規避了水位快速變化給升船機安全運行帶來的風險,值得類似工程借鑒。
(4)船舶航行下沉量δ。
升船機承船廂屬于典型的限制性航道,船舶進出船廂有明顯的活塞效應,尤其在船舶出廂過程中,廂內水體被船舶推出而來不及補充,引起廂內水深下降,船尾發生明顯下沉,船舶出廂過程船尾下沉明顯大于船舶進廂,是控制性工況。船舶航行引起的船尾下沉量是吃水控制的重要影響因素,且下沉量與船舶吃水(斷面系數)密切相關。圖5為景洪升船機船舶出廂過程航速與下沉量,可以明顯看出,船舶加速航行時,船尾的下沉量相應增大,由船舶航行引起的下沉量約15 cm。
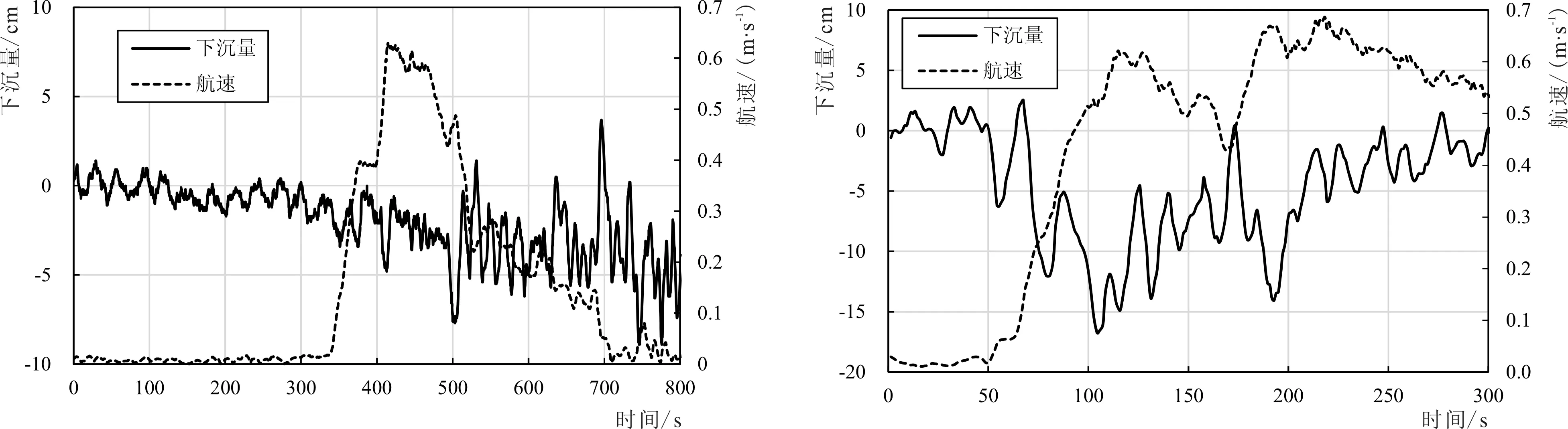
圖4 沙沱升船機進廂過程航速與下沉量Fig.4 Ship speed and sinkage in Shatuo shiplift圖5 景洪升船機船舶出廂航速與下沉量Fig.5 Ship speed and sinkage in Jinghong shiplift
(5)不觸底的安全水深ΔHS。
在《內河通航標準》中,對不觸底的安全富裕量的取值并無明確規定,僅在條文說明中解釋“對卵石和巖石質河床富裕水深值應另加0.1~0.2 m”。根據《航道工程手冊》的調查資料,對Ⅰ~Ⅲ級航道船舶不觸底安全富裕量一般為0.2 m,由于船閘底部類似卵石和巖石質河床應按硬底質考慮,因此應在此基礎上增加0.1~0.2 m,即Ⅰ~Ⅲ級航道船閘的不觸底安全富裕量應大于0.3~0.4 m;三峽船閘過閘船舶的不觸底安全富裕量按0.3 m取。
(6)其他因素。
除了上述因素之外,還有一些其他影響因素,如承船廂縱向變形、船舶的變形、螺旋槳的安裝高度等。實測多座升船機承船廂縱向撓度,對于長度約70 m的船廂,撓度一般在2~5 cm,如景洪、思林、沙沱、構皮灘等升船機;對于長度130 m左右的船廂撓度一般在5~8 cm,如三峽、向家壩等升船機。因此,在船廂富裕水深分析時,船廂的縱向撓度也應該考慮進去。
3 船舶下沉量預測公式
上述影響船舶吃水控制標準的多個因素在升船機運行方式固定后基本可以明確,較為復雜的影響因素即船舶的航行下沉量。在船舶進出港口下沉量研究方面,通過長期的研究,形成了一系列船舶下沉量預測公式,在文獻中引用較多的如Tuck公式、Hooft公式、Huuska公式、Barrass公式、Eryuzlu公式、Romisch公式、Millward公式、Ankudinov公式、ICORELS公式、Yoshimura公式、Norrbin公式等[10],這些公式具有一定的適用范圍和條件。在船舶進出升船機船廂下沉量研究方面,國內外也開展了諸多研究,考慮到原型觀測的難度和復雜影響因素,研究以模型試驗為主,形成的主要下沉量公式如下。
(1)我國《升船機設計規范》公式。
在《升船機設計規范》條文說明中,關于船舶進出廂下沉量推薦采用包綱鑒[4]提出的經驗公式,該公式是基于三峽、陸水、大化等升船機的模型試驗資料擬合得到
(3)
式中:δ為船舶綜合下沉量,m;h為閘室水深,m;v為船舶對水相對航速,m/s;n為斷面系數,n=F/f,F為船廂水下橫斷面面積,m2,f為船舯水下橫斷面面積,m2;g為重力加速度,m/s2;T為船舶吃水,m。
(2)向家壩升船機模型試驗公式。
李中華[6]通過向家壩升船機1 000 t單船和2×500 t船隊進出船廂模型試驗,總結得出,船舶進出承船廂時的最大下沉量主要與船速、船廂水深和斷面系數有關。基于模型試驗數據,擬合得到船舶下沉量預測公式
(4)
(3)三峽升船機模型試驗公式。
為制定三峽升船機運行方案中的船舶技術要求,南京水科院對通過升船機的散貨船、商品車、集裝箱、客船、新船型等多種代表性船型進行了系列模型試驗,建立船舶下沉量的預測公式
P=α×K+b
(5)
(6)
式中:α、b為擬合參數,公式(5)和(6)與公式(4)一致,區別僅在于擬合系數的取值。試驗表明,三峽升船機各種不同船型3 000 t級船舶(干散貨、集裝箱、商品車、新船型等)下沉量公式的系數α取值在2.14~2.82。
(4)德國呂內堡升船機模型試驗公式。
德國聯邦航道設計研究院針對現代大型內河船舶進出呂內堡升船機的問題,開展了大型船舶進出呂內堡升船機的試驗研究和數值計算研究工作。提出的船舶出廂時最大航行下沉量的計算公式

(7)
式中:CB為船舶方形系數;Frh為水深弗洛德數。該公式適應范圍為:1.17≤n≤3.26,0.018≤Frh≤3.26,0.83≤CB≤0.96。
上述公式均由模型試驗獲得,是目前升船機船廂設計、制定過機船舶技術要求的重要依據。實船試驗發現,公式預測與實測總體趨勢一致,數值存在一定偏差。
4 船舶吃水控制標準討論
(1)船舶下沉量原型觀測與模型試驗差異分析。
船舶航行下沉量是決定船舶吃水控制的一個重要變化因素,與船舶航速、斷面系數、船舶出廂位置等有關。在確定船廂設計水深階段,基本通過物理模型試驗論證船舶下沉量和富裕水深,建立相應的預測公式。但模型與原型會存在一定差異,使得模型公式在預測原型船舶下沉量時有所偏差,圖6為向家壩升船機船舶出廂下沉量模型試驗與原型觀測結果對比,圖中的P和K見公式(6),可以看出,二者擬合經驗公式的斜率基本一致,說明原型觀測與模型試驗在預測船舶下沉量變化(增幅)上是吻合的,差別主要在于初始值,即擬合公式截距上差異,模型明顯大于原型。初步分析,原型觀測與模型試驗差異的原因主要有兩個方面:一是原型與模型船舶駕引方面的差異,原型船舶是緩慢加速行駛的,斷斷續續用車,而模型船舶是連續加速到設定航速;二是模型中很難模擬或反映原型中多種水力因素的影響。總體上,模型獲得的船舶下沉量偏大,對設計偏于安全。因此,在船廂設計階段,通過模型試驗確定船廂水深具有充裕的安全系數,在升船機投運后,通過現場實船試驗,論證船舶吃水控制標準及影響因素,指導通過能力挖潛,總體上是合理的。
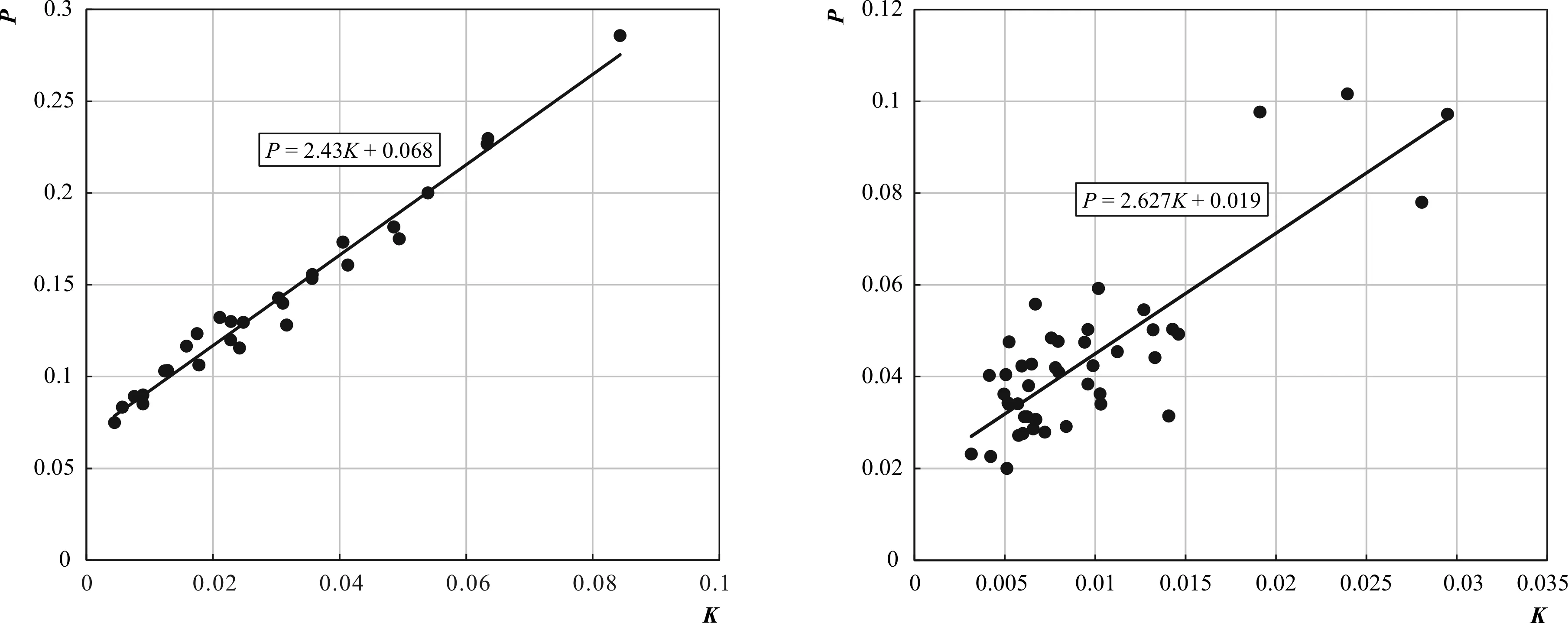
6-a 模型試驗6-b 原型觀測圖6 向家壩升船機船舶出廂下沉量原模對比Fig.6 Sinkage comparison between model test and prototype test in Xiangjiaba shiplift
(2)規范建議。
我國升船機設計規范建議h/T取1.25~1.4,根據大量實船試驗成果可知,實際船舶吃水可以按此標準控制,但已將富裕水深控制到了最低水平,同時還要嚴格控制船舶速度和水位變幅。實踐表明,我國升船機設計代表性船型與實際通航船型往往存在較大偏差,從通航船舶的多樣性、升船機運行條件的復雜性、未來船型及水運事業的發展等方面考慮,在升船機設計階段,按規范建議h/T取值確定船廂設計水深是偏低的,升船機建成后運行效益將受到嚴重影響。因此,在升船機設計階段,確定代表性船型除了參照主尺度系列外,還應結合實際通航的船舶情況,進而合理確定船廂尺度。從提高升船機對通航船舶的適應性、保證設計通過能力、預留一定挖潛空間考慮,建議h/T取值1.5~1.6。
(3)吃水標準提升。
已投運的多座大型升船機絕大部分船廂寬度是12 m,通航船舶寬度是10.8 m,扣除船舷防碰擦輪胎外,船舶進出廂過程中兩側的空間僅0.3~0.4 m,因此,船舶與船廂極易擦碰。從控制船舶下沉量考慮,船舶進出廂航速基本限制在0.5 m/s內,從防止船舶撞擊船廂考慮,也應盡量保持低速行駛。從實際運行情況看,在船長經過培訓、現場安裝船舶速度檢測設備后,船舶在進出廂過程中航速均能控制在0.5 m/s內,基本處于0.3~0.4 m/s,按設計吃水標準控制的船舶的下沉量不足10 cm,考慮其他各種影響因素后,船舶的吃水有一定的提升空間。近兩年,景洪、思林、沙沱、向家壩等升船機均開展了超吃水船舶進出船廂實船試驗,其中景洪、思林、沙沱升船機船舶吃水達到2.0 m,向家壩升船機船舶吃水達到2.4 m,均超過設計吃水0.4 m,在試通航運行期間吃水控制標準逐漸放寬,升船機的通過能力和船舶的航運效益隨之不斷提升。
5 結論
(1)基于多座大型升船機實船試驗,明確了船舶進出升船機船廂的富裕水深由水面半波動、船廂對接水位差、引航道水位變化、船舶航行下沉量、不觸底的安全水深、船廂縱向變形等組成。
(2)升船機對接運行水力學條件復雜,船舶進出船廂的下沉量存在一定原型觀測與模型試驗差異,模型試驗對于船廂水深設計有充裕的安全系數,實船試驗對于確定船舶吃水控制標準具有重要的指導意義。
(3)水深吃水比h/T規范建議取值偏小,從我國通航船舶的多樣性、升船機運行條件的復雜性、未來船型及水運事業的發展趨勢考慮,建議在升船機船廂設計階段h/T取值1.5~1.6。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國船檢(2017年3期)2017-05-18 11:33:09
