基于動態減重的下肢康復機器人設計與控制策略研究
2020-12-12 08:33:12梁煜欣嚴輝李軍
現代儀器與醫療 2020年5期
關鍵詞:康復
梁煜欣 嚴輝 李軍
(1.臺州學院航空工程學院,浙江臺州 318000;2.臺州方圓質檢有限公司,浙江臺州 318000)
隨著經濟社會的快速發展,人口老齡化趨勢日益嚴峻。因腦卒中、中風、脊椎損傷等疾病導致下肢運動困難人數也呈增加的趨勢[1,2],給社會和家庭帶來沉重負擔。70%以上的患者通過早期介入康復訓練可恢復步行能力。傳統的康復治療,需要治療師和患者家屬專門化指導進行康復訓練,對治療師的技術水平也有較高的要求,極大地加重了陪護者的體力支出和患者的經濟支出,降低了患者和陪護者的生活質量[3-5]。為解決以上問題,為患者提供科學合理的康復治療,下肢康復機器人應運而生[3-5]。瑞士Hocoma公司研制的Lokomat 步行康復機器人在業內具有廣泛知名度[6],由外骨骼式助行機械腿及跑臺和懸吊減重裝置兩部分組成,幫助患者完成矢狀面內的往復步態訓練。該機器人是首臺以減輕下肢負重進行下肢康復治療的康復產品,經過不斷改進,已在許多康復中心投入使用。此外,瑞士Yves Allemand等人研制了 “Walk Trainer”下肢康復機器人[7]。我國清華大學、上海大學在該領域內也有一定研究。目前,我國自主研發的康復機器人很少實現產品化進行大規模商用,高技術含量的產品均依賴進口,且售價昂貴,大部分患者難以承受,因此,研發一款具有自主知識產權、實用高效的康復機器人具有深遠意義。
該研究設計基于動態減重的下肢康復機器人,工作原理是通過在動態減重單元的恒減重基礎上,依靠下肢輔助行走單元幫助患者進行訓練,對損傷的運動神經進行全方位刺激。康復機器人具有欠驅動結構、患者自主控制、魯棒性好的優點,適合醫院和家庭使用,能顯著提高患者的自主康復訓練積極性及治療效果。
1 機器人結構設計
1.1 人體下肢運動機理分析
為了設計出科學合理、具有擬人化的康復機器人[8],首先要分析正常人體下肢的骨骼、肌肉和行走機制,在此基礎上進行結構設計和步態控制。正常人步態周期相位圖如圖1所示[9]。
1.2 機器人的機械結構設計
機器人在工作空間上由兩大驅動單元組成,分別為:動態減重支撐單元和下肢輔助行走單元,機器人整體呈對稱分布關系,機器人樣機如圖2所示。

圖1 正常人步態周期相位圖

圖2 動態減重下肢康復機器人
運動單元示意圖如圖3所示。考慮到人體下肢的運動空間在矢狀面、額狀面均有分布。與目前設計的大部分康復機器人不同的是,該設計為保證最大的擬人化要求,將下肢輔助行走部分設計為欠驅動形式,可以使其具備非常好的個體適應性,完成下肢空間多自由度的運動。

圖3 運動單元示意圖
醫學上認為單腿站立時,患側下肢能夠負重站直為宜,當減重為人體重量的20%或 40%時,步行耗氧量隨減重量的增加而減少;當減重量達體重的 60%時,不僅各項步行參數發生明顯改變,而且步行耗氧量也有所增加[10]。人在步行過程中,重心呈正弦變化,因此,需要設計動態減重裝置提供給人向上的恒減重力。動態減重裝置通過反饋回主控板的力信號與設定目標進行對比,控制絲杠螺母升降臺進行上下移動。
下肢輔助行走欠驅動結構如圖4所示。由直流減速電機,同步帶滑臺與其他機構組成,該結構分別布置于人體兩側的髖關節和膝關節處,減速電機帶動同步帶滑臺上的滑塊進行直線運動,與滑塊形成串聯的腿部固定板與大腿、小腿中間位置固連,其中圖4中所示的圓柱副、轉動副和直線導軌是人機在下肢擁有6自由度,將電機的旋轉驅動轉化為肢體的欠驅動,既保證了患者下肢的個體適應性,滿足不同身高、不同體重的患者使用的柔順性,又保證了整體結構的緊湊性和實用性,使控制更加靈活、高效。

圖4 單側欠驅動結構圖
2 人機耦合控制策略
經分析,動態減重下肢康復機器人與患者之間的協調控制主要是動態減重支撐單元和下肢輔助行走單元之間的協調控制,康復訓練的科學合理性取決于控制策略。
2.1 康復過程分析
康復過程分析是整體控制策略的核心,決定機器人的控制策略。因此,有必要對患者使用設備康復的流程進行分析,以常規康復(輔助患者下床,并進行肢體康復)為例,具體如下:
(1)患者坐在床邊,穿戴好懸吊服和腿部固環,在控制上輸入體重和減重比例。
(2)按下控制器的“起立”鍵,絲桿螺母升降臺升起,依靠支撐梁和懸吊服將患者助力站立。
(3)“S拉力傳感器”檢測到設定的體重的60%,升降臺下降,當“S拉力傳感器”檢測到0N時,完成回零操作,準備進行下肢步行康復。
(4)按下控制器的“康復模式1”,進行常規康復,撥動PS2搖桿手柄,進行直線向前行走和轉彎行走及加減速的控制。
(5)訓練結束,進行歸零操作,患者完成一周期康復。
2.2 動態減重支撐機構動力學建模及控制
減重步行康復訓練時,患者下肢機理退化,無法承載自身的重量、難以保持平衡,該設計利用減重支撐系統為患者卸載自重,幫助患者保持身體平衡進行行走訓練。需要對減重支撐單元進行原理分析和動力學建模。動態減重機構簡圖如圖5所示。

圖5 動態減重機構簡圖
由于人體在運動過程中,重心為正弦變化,運動軌跡數學模型可表述為:

其中T為步態周期,t為時間(s),患者和支撐梁通過懸吊服和S型拉力傳感器串聯,人機接觸可用質量-彈簧-阻尼系統(m-c-k)描述,則減重力:

其中me為人體期望減重力質量;k為人機接觸的剛度系數;b為人機接觸的阻尼系數;y0為螺母初始零點的位置。
升降臺采用絲杠螺母驅動方式,升降臺絲杠傳動動力學方程為:

根據工作原理,建立直流電機的數學模型[11]。
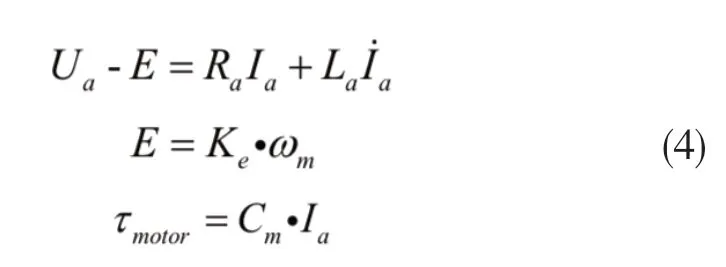
最終,減重系統的動力學方程表示為:

式中Ph為絲杠導程;n1為絲杠進給正效率;Ua為電機兩端電壓;E為電機反動勢;Ra為電樞回路總電阻;La為電樞回路總電感;Ia是電樞電流;Ke為反電勢系數;wm為電機軸的角速度;Jm為電機電樞的轉動慣量;Kb為等效阻尼系數;Cm為電機轉矩數。
在步態康復訓練過程中,動態減重機構根據S型拉力傳感器回傳到主控芯片的重心豎直方向的拉力模擬量,與設定減重力進行對比,采用離散型的pid控制算法。

2.3 下肢輔助行走機構運動學建模及控制
下肢輔助行走單元主要是由四支同步帶滑臺、直流電機和絕對值編碼器組成,四個滑塊的運動軌跡規劃對決定步態參數具有決定性作用,因此需要對下肢-滑塊建立運動學模型,下肢人機耦合模型如圖6所示。

圖6 單側下肢-滑塊耦合模型
滑塊D和滑塊E的運動軌跡規劃決定步態控制策略,建立單側下肢-滑塊耦合模型運動學[12]方程:

滑塊G在桿BC上表現為移動副,有1個自由度,所以LBE桿長時變,對LBE建立運動學關系式:

其中,根據建立的人-機模型,人體下肢長度LAB=457mm;機器人設計參數h1=205mm,h2=600mm。
由此構建出滑桿LBE與已知髖、膝關節角度之間的關系式。髖關節角度α和膝關節角度β的數據以仿真試驗CGA (clinical gait analysis)數據[13]作為驅動進行分析,正常步態下兩周期的髖關節角度α和膝關節角度β與相位關系如圖7所示。

圖7 正常步態髖、膝關節角度變化曲線
將其直行步態帶入運動學方程(6)中,最后將求得的數據導入到Matlab軟件進行計算,得到理論計算兩個周期下的滑塊D和滑塊E的運動軌跡如圖8所示。

圖8 計算求解得滑塊D和滑塊E的運動軌跡
運動模式通過Labview作為上位機與主控芯片進行串口通信選擇功能,輔助行走訓練中的運動路徑通過PS2 joystick搖桿模塊進行前后左后、左轉右轉的差動運動,即通過讀取搖桿模塊的模擬量改變驅動函數的幅值條件,實現加減速、換向等功能。
3 樣機分析及實驗研究
搭建樣機有兩個目的,一是驗證控制策略中關節驅動函數在實際人機協作過程中的效果;二是驗證所設計的機器人是否符合人體運動機理,是否存在相互干涉,為后續的改進提供數據指導。該項目分別搭建了虛擬樣機和實物樣機,驗證了理論計算的正確性。
該研究將在Solidworks中建立人機協作三維模型導入到Adams中,利用Adams運動仿真模軟件[14]對該康復機器人進行人機耦合仿真分析,假人模型以身高為175cm的為例。圖9為在Adams中設置的連接與約束。

圖9 Adams中設置的連接與約束
在Adams軟件中,將CGA驅動數據以采用CUBSPL樣條函數驅動,在Adams中需要編寫對應關節驅動函數,具體關節驅動函數如表1所示。

表1 關節驅動函數
機器人模型中各零件的性能參數根據物理樣機實際材料設置,人體下肢各肢體的參數根據人體慣性參數設置。滑塊XD和滑塊XE決定了下肢欠驅動式運動的合理性和柔順性,對康復效果起決定性作用。以機器人左側驅動關節為例,仿真后輸出滑塊XD和XE的運動軌跡,如圖10所示。
根據圖10可以看出,仿真得出的XD和XE兩滑塊的運動軌跡流暢順滑,兩滑塊直線位移最大不超過350mm,小于設計同步帶滑臺500mm有效位移的設計量,且無任何干涉,驗證了設計尺寸的合理性。

圖10 XD、XE的仿真運動軌跡曲線
XD、XE的仿真位移速度曲線如圖11所示,分析其位移速度,均小于20mm/s,符合所選型的直流電機型號和同步帶參數,并為制作實物樣機提供數據支持。

圖11 XD、XE的仿真位移速度曲線
XD、XE的實驗運動軌跡曲線如圖12所示,實驗平臺通過LabView搭建康復系統的上位機[15],通過藍牙串口通信與STM32ZET6單片機進行數據傳輸控制,歐姆龍E6B2編碼器聯結在同步帶滑臺輸出軸上,記錄并計算出滑塊的實時位移情況,將其記錄下來,并與仿真數據進行比較分析。
圖12可以看到,驅動髖關節、膝關節運動的滑塊XD和XE在仿真環境下和實驗測試環境下具有高擬合度、相似性,滑塊XD的實驗運動軌跡均略高于仿真軌跡,滑塊XE的實驗運動軌跡分布于仿真軌跡上下,但與仿真結果成正比例,分析誤差主要原因為機械損耗和人體運動的差異性。符合實驗預期,驗證了理論計算和控制策略的正確性。

圖12 XD、XE的實驗運動軌跡曲線
4 討論
針對偏癱患者的增多和康復成本的日益提高,該研究提出了基于動態減重的下肢康復機器人。分析目前各科研院所、高校在該領域關鍵技術的研究進展[16],大多以穿戴式的外骨骼康復機器人、多種傳動助力方式、腦機結合控制機器人為主,但是,目前大部分研究成果仍然停留在實驗層面。總結原因,主要由高研發成本引起的高售價,剛性連桿與多自由度的人體易導致人機系統不穩定,穿戴舒適感性不佳導致的。
該文設計的康復機器人具有輔助患者在減重中步行、在步行中康復,在真實的路況環境下減重輔助行走更有利于患者康復,根據患者的不同步行能力提供相應的行走訓練策略,幫助腦卒中患者重新獲得步行功能。搭建虛擬樣機進行仿真分析,并得到了實驗驗證,實驗結果表明此下肢康復機器人符合設計預期,并為以后的臨床研究提供了重要參考依據。在下一階段,該研究將繼續完善控制系統,引入模糊自適應阻抗控制,開展基于腦電和肌電的混合腦機接口的研究,提高康復機器人的人機協同性,從而進一步來提高康復效率、完善訓練功能,以實現患者更好的康復訓練。
猜你喜歡
康復(2023年11期)2023-11-20 07:45:54
康復(2023年14期)2023-11-20 06:04:54
中老年保健(2021年4期)2021-08-22 07:08:14
護理與康復(2021年2期)2021-03-05 08:10:44
家庭醫學(下半月)(2020年1期)2020-05-11 02:05:46
廣東醫科大學學報(2020年6期)2020-02-06 06:00:56
特別健康(2018年2期)2018-06-29 06:13:44
反射療法與康復醫學(2017年7期)2017-01-16 01:11:02
中國衛生(2014年6期)2014-11-10 02:30:50
中國中醫藥現代遠程教育(2014年23期)2014-03-01 04:33:45