降低SRM轉(zhuǎn)矩脈動的離線轉(zhuǎn)矩分配函數(shù)研究
2020-12-14 09:13:04黃朝志屈資喻劉細(xì)平
計算機應(yīng)用與軟件 2020年12期
關(guān)鍵詞:分配
黃朝志 王 濤 屈資喻 劉細(xì)平
(江西理工大學(xué)電氣工程與自動化學(xué)院 江西 贛州 341000)
0 引 言
開關(guān)磁阻電機由于其結(jié)構(gòu)簡單、成本較低、性能好等一系列優(yōu)點,自問世以來受到國內(nèi)外科研學(xué)者的廣泛關(guān)注[1]。但是由于其固有的雙凸極結(jié)構(gòu)和非線性系統(tǒng),導(dǎo)致其轉(zhuǎn)矩脈動要比其他傳動系統(tǒng)嚴(yán)重。此外,SRM的轉(zhuǎn)矩脈動不僅是其噪聲和振動的來源,也是電機驅(qū)動器上的擾動源[2]。
通常來說,抑制轉(zhuǎn)矩脈動的方法主要包括優(yōu)化電機的本體結(jié)構(gòu)參數(shù)[3]和采用高級控制策略,如直接轉(zhuǎn)矩控制[4]、自適應(yīng)控制[5]和轉(zhuǎn)矩分配函數(shù)控制(Torque Sharing Function, TSF)[6-8]等。離線轉(zhuǎn)矩函數(shù)控制大多是在傳統(tǒng)TSF的基礎(chǔ)上采用兩個以下的優(yōu)化目標(biāo)。文獻(xiàn)[5]運用Tikhonov因子與轉(zhuǎn)矩分配函數(shù)相結(jié)合,得出以銅耗和電流變化率為目標(biāo)的優(yōu)化函數(shù),有效降低了轉(zhuǎn)矩脈動和電流峰值,但由于其引入較寬的負(fù)轉(zhuǎn)矩產(chǎn)生區(qū)域從而降低了電機的運行效率。文獻(xiàn)[9]驗證了導(dǎo)通角和重疊角對SRM的最大速度、銅耗和效率的顯著影響,此外通過遺傳算法對傳統(tǒng)四種轉(zhuǎn)矩分配函數(shù)的導(dǎo)通角和重疊角進(jìn)行優(yōu)化,降低了轉(zhuǎn)矩脈動。文獻(xiàn)[10]提出了一種新型的將轉(zhuǎn)矩波形轉(zhuǎn)化為電流波形的ik(θ,Tk)解析表達(dá)式,通過改變表達(dá)式中的參數(shù)對磁鏈變化率和銅耗進(jìn)行比較,從中選擇拓展速度范圍或降低銅耗的轉(zhuǎn)矩分配函數(shù)。
本文提出了一種在寬速范圍內(nèi)降低SRM轉(zhuǎn)矩脈動的離線轉(zhuǎn)矩分配控制方案。由SRM的電感-轉(zhuǎn)矩特性,通過可逆轉(zhuǎn)矩函數(shù)模型提出的兩個關(guān)于轉(zhuǎn)子位置的函數(shù),將參考轉(zhuǎn)矩轉(zhuǎn)化為參考電流以實現(xiàn)良好的跟蹤特性。將電流的平方(銅耗)和磁鏈變化率與Tikhonov因子相結(jié)合構(gòu)造目標(biāo)優(yōu)化函數(shù),通過效率和轉(zhuǎn)矩速度性能之間的平衡選擇,運用遺傳算法進(jìn)行優(yōu)化,得出特定Tikhonov因子的離線轉(zhuǎn)矩分配函數(shù)曲線。通過場路耦合仿真驗證,與傳統(tǒng)的線型、立方型轉(zhuǎn)矩分配控制相比,本文提出的離線轉(zhuǎn)矩分配控制策略能有效提升轉(zhuǎn)矩-速度性能,降低轉(zhuǎn)矩脈動。
1 轉(zhuǎn)矩分配控制策略
1.1 SRM的電感模型分析
由于開關(guān)磁阻電機的雙凸極定轉(zhuǎn)子結(jié)構(gòu)以及互磁易飽和的特點,大多數(shù)SRM的建模分析的基本目的是找出磁鏈、轉(zhuǎn)子位置角和相電流之間的關(guān)系。如果電流ik和位置角θ被選定為獨立變量,那么磁鏈ψk通常被定義為:
ψk(θ,ik)=Lk(θ,ik)ik
(1)
式中:Lk表示為相電感。但事實上電感Lk不僅和相電流ik有關(guān),也與轉(zhuǎn)子位置角θ有關(guān)。對于所研究的12/8極開關(guān)磁阻電機,借助Maxwell-19.3軟件進(jìn)行有限元分析,定子外徑120 mm,定子內(nèi)徑69.6 mm,鐵芯材料DW360-50,電機功率1.2 kW。通過有限元分析,得到在相電流分別為1、2、3、4、5、6、7、10 A時,相電感Lk在不同轉(zhuǎn)子位置角θ下的值,如圖1所示。
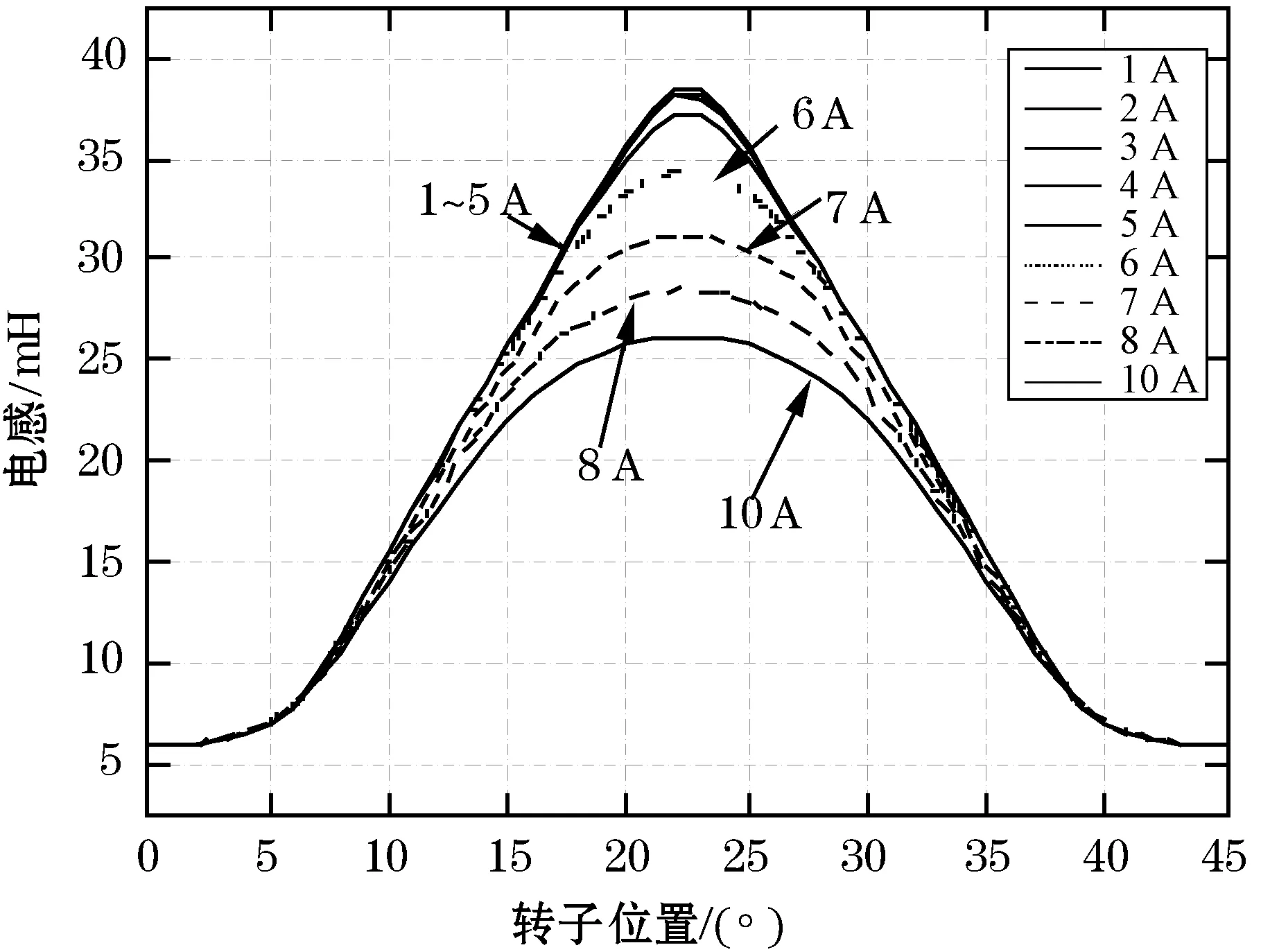
圖1 SRM的電感曲線
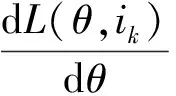
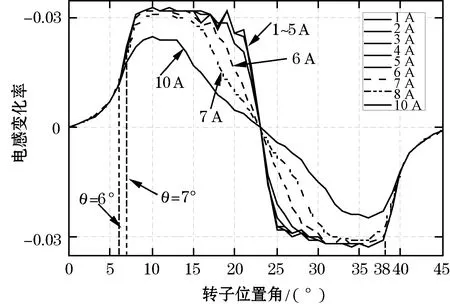
圖2 電感相對于轉(zhuǎn)子位置的變化率曲線
由式(1)可知,電感L取決于電流ik和位置角θ。當(dāng)磁鏈不飽和時,SRM在小電流下的電感L主要受位置角θ的影響,結(jié)合式(1)可得:
(2)
式中:Tk(θ,ik)為導(dǎo)通相的相轉(zhuǎn)矩;Wc(θ,ik)為繞組的磁功能;電感值L關(guān)于θ的微分函數(shù)值的2倍定義為Lp(θ)。
1.2 SRM的轉(zhuǎn)矩控制
圖3所示為基于TSF實現(xiàn)三相SRM驅(qū)動的轉(zhuǎn)矩控制原理圖。將速度環(huán)輸出的總參考轉(zhuǎn)矩Te-ref根據(jù)轉(zhuǎn)子位置角θ劃分為各階段的單相參考轉(zhuǎn)矩Tk-ref。通過T-θ-i,即“轉(zhuǎn)矩-位置-電流”模塊把單相參考轉(zhuǎn)矩值轉(zhuǎn)換為參考電流ik-ref,與實際相電流ik比較后,經(jīng)過滯環(huán)比較器進(jìn)行調(diào)節(jié)控制。
圖3 基于轉(zhuǎn)矩分配函數(shù)的SRM控制系統(tǒng)框圖
為了最大限度降低轉(zhuǎn)矩脈動,常用的轉(zhuǎn)矩分配函數(shù)通常選擇線型、正弦函數(shù)型、指數(shù)型或立方型。在換相過程中,每相的參考轉(zhuǎn)矩Tk-ref的函數(shù)被定義為:
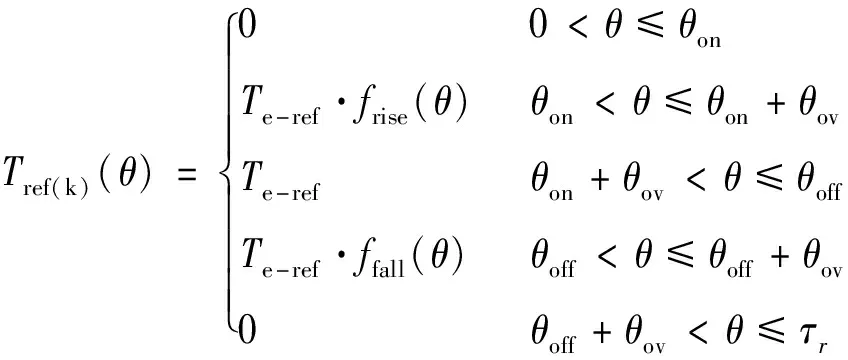
(3)
θoff=θon+ε
(4)
(5)
1.3 TSF的評估指標(biāo)
為了評估轉(zhuǎn)矩分配函數(shù)的轉(zhuǎn)矩-速度性能、SRM的效率和轉(zhuǎn)矩脈動率,定義如下判定指標(biāo)。
1)轉(zhuǎn)子位置的磁鏈變化率。磁鏈相對于轉(zhuǎn)子位置的變化率(ARCFL)是評估SRM的轉(zhuǎn)矩-性能的一個重要標(biāo)準(zhǔn),其值Qψ的表達(dá)式如下:
(6)
式中:ψrise為導(dǎo)通相第k相得上升磁鏈;ψfall為前一相第k-1相的下降磁鏈。
不考慮磁鏈耦合和相位壓降的情況下,可由SRM的電壓公式推導(dǎo)出公式如下:
(7)
(8)
2)銅耗。銅耗是影響電機效率的重要因素之一。銅耗可以用電流在導(dǎo)通期間的均方根值,即用有效值Irms來表示:
(9)
3)轉(zhuǎn)矩脈動率。與式(11)的分析方法類似,本文定義一種計算瞬時轉(zhuǎn)矩脈動平均值的方法如下:
(10)
1.4 可逆轉(zhuǎn)矩函數(shù)模型
(11)
式中:Lp(θ)已知;g(θ)也是關(guān)于轉(zhuǎn)子位置的函數(shù):
(12)

(13)
在不同轉(zhuǎn)子位置θ和電流ik下,通過式(13)計算的參考轉(zhuǎn)矩值與Maxwell有限元仿真得到的參考轉(zhuǎn)矩擬合曲線如圖4所示。可以看出,該可逆轉(zhuǎn)矩函數(shù)的擬合度較高,同時適用于線性磁鏈區(qū)域和飽和磁鏈區(qū)域。

圖4 有限元仿真的參考轉(zhuǎn)矩曲線
2 基于遺傳算法優(yōu)化的TSF
2.1 基于Tikhonov因子目標(biāo)函數(shù)
由式(8)可知,為了最大限度地提升SRM的寬速范圍,應(yīng)最小化磁鏈變化率的值。因此本文采用以參考電流及其微分值的平方與Tikhonov因子相結(jié)合的方法構(gòu)造新型目標(biāo)函數(shù)如下:
(14)
s.t. 0≤ik-1≤Imax;0≤ik≤Imax
Tk-1(θ,ik-1)+Tk(θ,ik)=Te
式中:m、n、p、q為Tikhonov因子;ik-1(θ)、ik(θ)表示當(dāng)前轉(zhuǎn)子位置角θ下前一相與后一相的電流值;電流變化步長和位置變化步長為Δik=ik(θ)-ik(θ0),Δθ=θ-θ0,θ0表示前一時刻的轉(zhuǎn)子位置角,ik-1(θ0)、ik(θ0)為該時刻相鄰兩相的電流值。
為了解決式(14)中的優(yōu)化問題,需要確定Tikhonov因子m、n、p、q的值。Tikhonov因子的大小表明該目標(biāo)函數(shù)的重要性,其值越大則對結(jié)果的影響也就越大。為了簡化分析,以避免復(fù)雜的公式推導(dǎo),將當(dāng)前相的參考電流作為基準(zhǔn)值,即令d=1;然后考慮在導(dǎo)通和關(guān)斷階段,磁鏈變化率對電流有效值,即銅耗的影響程度,定義如下:
(15)
事實上,導(dǎo)通角和關(guān)斷角的取值都會對磁鏈的變化率產(chǎn)生重要影響[9]。經(jīng)過在不同θon、θoff和θov下,直線型和立方型TSF的仿真比較得知,線型TSF的磁鏈變化率大于立方型TSF。以θon、θoff和θov分別為4.5°、19.5°和3°,負(fù)載轉(zhuǎn)矩為1 Nm為例,圖5給出了參考轉(zhuǎn)矩以及磁鏈變化率的曲線波形。
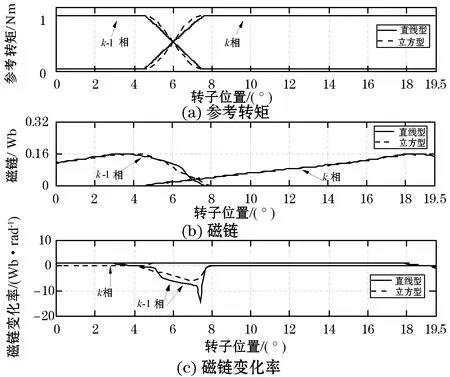
圖5 參考轉(zhuǎn)矩、磁鏈和磁鏈變化率曲線

J=r(ik(θ)2+sik-1(θ)2)
(16)
式中:r可以調(diào)整,以平衡銅耗損失和轉(zhuǎn)矩脈動率。由圖(2)可知,在導(dǎo)通初始階段,電感變化率較小,因此需要更高的相電流以達(dá)到參考轉(zhuǎn)矩值。r值較小時強調(diào)轉(zhuǎn)矩脈動率,k-1相的電流有效值Irms會增大,且轉(zhuǎn)子達(dá)到對其位置后剩余的磁共能就會產(chǎn)生負(fù)轉(zhuǎn)矩而降低電機的效率;而r值增大時,則強調(diào)銅損耗,k相電流值增大導(dǎo)致轉(zhuǎn)矩脈動率的上升。設(shè)定r取值范圍為0.25~1時的優(yōu)化效果如圖6所示,從上到下的曲線簇中,各曲線r的取值分別為1、0.75、0.5和0.25。

圖6 不同Tikhonov因子下的優(yōu)化效果
當(dāng)r=1時,這與傳統(tǒng)TSF的控制效果類似,在每一相導(dǎo)通初期,相電流ik急劇上升并產(chǎn)生峰值。r取值越小,導(dǎo)通初期被分配的轉(zhuǎn)矩越小,關(guān)斷階段被分配的轉(zhuǎn)矩也就越大,進(jìn)而控制了導(dǎo)通初期和關(guān)斷階段的瞬時電流變化率。
由圖5和圖6可知,在SRM整個運行階段,關(guān)斷階段的磁鏈變化率的絕對值是最大的,根據(jù)式(8),最大TRFS也就由關(guān)斷階段的磁鏈變化率決定。在參考轉(zhuǎn)矩為1 Nm時,直線型、立方型及r取0.5時優(yōu)化TSF的最大磁鏈變化率分別為12.6、6.4 和1.2 Wb/rad,可得最大TRFS為17.5、31.3和166.7 rad/s,因此直線型、立方型的最大TRFS為167.1、298.9 r/min,而優(yōu)化TSF在r=0.5時的TRFS可達(dá)到1 591.9 r/min,明顯提高了SRM的速度性能。
該算法可應(yīng)用于任何SRM的設(shè)計,以獲得更好的轉(zhuǎn)矩脈動性能。在寬速范圍內(nèi),可以調(diào)整式(16)中的r值以增加選擇的靈活性。通過選擇合適的Tikhonov因子可以增加重疊區(qū)域,減小電流變化率,如圖5所示。優(yōu)化后的TSF比傳統(tǒng)TSF的磁鏈(電流)變化要平穩(wěn)得多,最大磁鏈變化也明顯降低了。
2.2 遺傳算法
隨著轉(zhuǎn)速的升高,由于勵磁周期的縮短以及感應(yīng)電壓的影響,選擇合適的r值以實現(xiàn)保持最小銅耗和減少轉(zhuǎn)矩脈動率的平衡愈發(fā)困難。遺傳算法(Genetic Algorithm,GA)是借鑒遺傳進(jìn)化和自然選擇的思想和發(fā)展機制的一種直接搜索算法,它從隨機創(chuàng)造種群開始,通過不斷重復(fù)地評估、選擇、交叉和突變,直到達(dá)到預(yù)定的世代數(shù)或者找到滿意的解決方案[12-13]。因此,對于單目標(biāo)優(yōu)化參數(shù)的式(16)來說,遺傳算法可以得到更精確的r值。
在執(zhí)行基于GA的算法之前,需要進(jìn)行適當(dāng)?shù)木幋a,根據(jù)搜索范圍,設(shè)置精度為e-4,得到10位數(shù)的二進(jìn)制編碼。種群大小和迭代次數(shù)都設(shè)為50,如果后代的輸出參數(shù)的值不符合約束范圍0~1,則拋棄該數(shù)值。由于目標(biāo)函數(shù)是求相電流平方以及電流相對于轉(zhuǎn)子位置倒數(shù)平方的最小值,因此定義適應(yīng)度函數(shù)如下:
(17)
式中:Xi表示種群中第i個個體,其自適應(yīng)函數(shù)值越大,表明個體的適應(yīng)度越好。
選擇操作采用輪盤賭[13]選擇法,其目的是產(chǎn)生更多的后代,通過個體的適應(yīng)度值與種群的總適應(yīng)度值之比來計算個體i能遺傳到下一代的概率:
(18)
式中:F(Xi)、P(Xi)和N表示為個體的適應(yīng)度值、被選擇的概率和種群的大小。F(Xi)值越大,則繁衍出下一代的概率也就越高。
交叉的目的在于將不同個體的有用片段重新組合,形成適應(yīng)度更好的后代。交叉點的位置和個數(shù)由算法隨機生成,以便克服局部最優(yōu)現(xiàn)象,其原理如圖7所示。

圖7 交叉操作原理圖
突變操作是另一種避免局部最優(yōu)的方法。原理是以較小的概率隨機改變個體中的每位基因的數(shù)值,突變的示例結(jié)果如圖8所示。

圖8 突變操作原理圖
3 仿真結(jié)果
對于該12/8極三相開關(guān)磁阻電機,直流端電壓Ud為220 V,給定轉(zhuǎn)矩為2 Nm,采用AnsysEM 2019R1套件中的Maxwell與Simplorer的耦合場路仿真平臺,確保瞬態(tài)有限元分析和驅(qū)動系統(tǒng)的仿真分析實時、同步,以驗證所提出離線TSF的性能。電流滯環(huán)寬度設(shè)為0.1 A,仿真采樣時間ts為1 μs。每個權(quán)重參數(shù)r值由遺傳算法確定,以確保最優(yōu)選擇,主電路模型拓?fù)淙鐖D9所示。
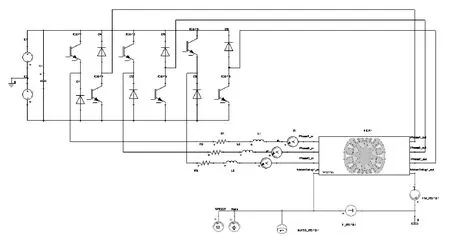
圖9 場路耦合仿真主電路拓?fù)鋱D
圖10為未采用遺傳算法下,不同Tikhonov因子的優(yōu)化TSF與傳統(tǒng)直線型和立方型TSF的轉(zhuǎn)矩脈動率和電流有效值的對比結(jié)果。

圖10 不同TSF下的對比結(jié)果
圖10(a)和(b)比較了在2 Nm轉(zhuǎn)矩下,不同轉(zhuǎn)矩分配函數(shù)的轉(zhuǎn)矩脈動率Tripple和電流有效值Irms,此時導(dǎo)通角θon和重疊角θov設(shè)定為4°和3.5°。電機轉(zhuǎn)速高于ωmax后,在轉(zhuǎn)子到達(dá)下一個對齊位置時,勵磁電流并不能減小到零,因此相轉(zhuǎn)矩Tk-ref會產(chǎn)生一定的負(fù)轉(zhuǎn)矩,從而導(dǎo)致了轉(zhuǎn)矩脈動。隨著轉(zhuǎn)速的進(jìn)一步提高,換向時間減小,參考轉(zhuǎn)矩跟蹤實際轉(zhuǎn)矩的能力降低,轉(zhuǎn)矩脈動變得更加明顯。傳統(tǒng)的線型和立方型TSF在1 800 r/min時的轉(zhuǎn)矩脈動率幾乎是300 r/min時的兩倍;而在1 800 r/min下,當(dāng)Tikhonov因子r小于0.75時,離線TSF的轉(zhuǎn)矩脈動率要小得多,r=0.25時的轉(zhuǎn)矩脈動率最低。由圖10(b)可知,離線TSF和線型以及立方TSF表現(xiàn)出了相似的電流平均值,r=0.5的電流平均值Irms最小。通過綜合考慮最大無轉(zhuǎn)動脈動速度、銅耗以及轉(zhuǎn)矩脈動率可得知,選取r=0.5的離線TSF是一種低轉(zhuǎn)矩脈動、低銅耗的開關(guān)磁阻電機控制策略。
為驗證本文所提出的采用遺傳算法后優(yōu)化離線轉(zhuǎn)矩分配函數(shù)的有效性,分別在600、1 200、1 800 r/min下進(jìn)行對比實驗。為了使離線TSF和傳統(tǒng)TSF進(jìn)行公平比較,還可以根據(jù)銅耗最小化的基礎(chǔ)上選擇導(dǎo)通角、重疊角和關(guān)斷角[5],依據(jù)文獻(xiàn)[7]方法選擇θon、θov分別為3.3°、4.2°。
在轉(zhuǎn)速為600 r/min、負(fù)載轉(zhuǎn)矩為2 Nm時,采用常規(guī)的直線型、立方型和本文所提出的離線轉(zhuǎn)矩分配函數(shù)控制得到的相電流、相轉(zhuǎn)矩和相參考轉(zhuǎn)矩以及總轉(zhuǎn)矩如圖11所示。

圖11 轉(zhuǎn)速為600 r/min,轉(zhuǎn)矩為2 Nm,θon=3.3°,θov=4.2°的仿真結(jié)果
在轉(zhuǎn)速為1 200 r/min、負(fù)載轉(zhuǎn)矩為2 Nm時,采用常規(guī)的直線型、立方型和本文所提出的離線轉(zhuǎn)矩分配函數(shù)控制得到的相電流、相轉(zhuǎn)矩和其參考轉(zhuǎn)矩以及總轉(zhuǎn)矩如圖12所示。
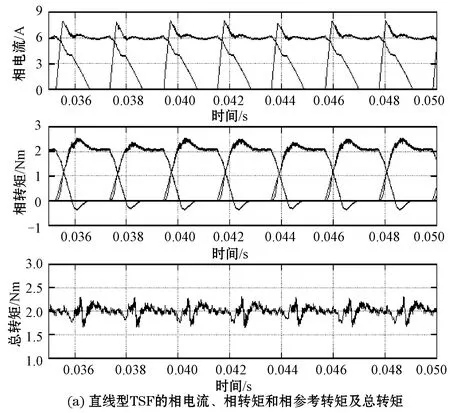
圖12 轉(zhuǎn)速為1 200 r.min,轉(zhuǎn)矩為2 Nm,θon=3.3°,θov=4.2°的仿真結(jié)果
在轉(zhuǎn)速為1 800 r/min、負(fù)載轉(zhuǎn)矩為2 Nm時,采用常規(guī)的直線型、立方型和本文所提出的離線轉(zhuǎn)矩分配函數(shù)控制得到的相電流、相轉(zhuǎn)矩和其參考轉(zhuǎn)矩以及總轉(zhuǎn)矩如圖13所示。

圖13 轉(zhuǎn)速為1 800 r/min,轉(zhuǎn)矩為2 Nm,θon=3.3°,θov=4.2°的仿真結(jié)果
在上述三種轉(zhuǎn)速下,采用直線型、立方型以及離線轉(zhuǎn)矩分配函數(shù)控制時,SR電機性能對比如表1所示。
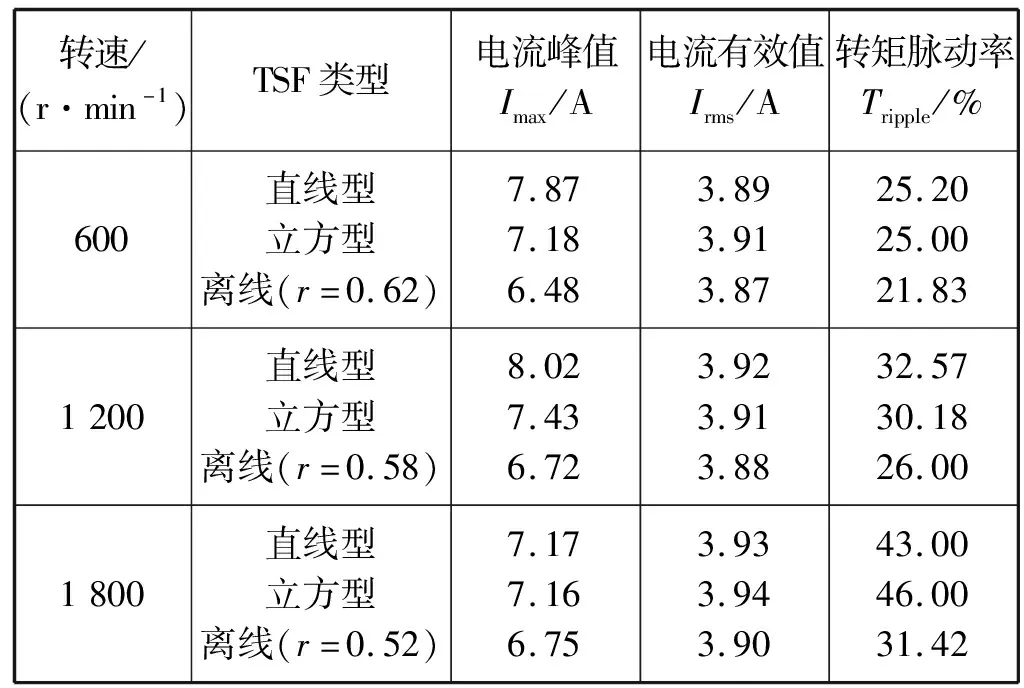
表1 不同轉(zhuǎn)速下直線型、立方型和離線TSF性能對比
由圖11-圖13可知,在負(fù)載轉(zhuǎn)矩為2 Nm時,本文所提出的離線轉(zhuǎn)矩分配函數(shù)控制策略能有效降低轉(zhuǎn)矩脈動率,且相電流的峰值Imax均小于傳統(tǒng)線型和立方型轉(zhuǎn)矩分配函數(shù)控制。在600和1 200 r/min下,相對于線型和立方型TSF,離線TSF的相轉(zhuǎn)矩跟蹤特性較好,跟蹤誤差接近于零;當(dāng)電機轉(zhuǎn)速超過ωmax而達(dá)到1 800 r/min時,離線TSF的跟蹤特性變差,跟蹤誤差開始增大,此時轉(zhuǎn)矩脈動率為31.42%,但相對于傳統(tǒng)的線型TSF和立方型TSF,該控制方式仍表現(xiàn)出顯著的優(yōu)越性。
4 結(jié) 語
本文提出一種高效的離線TSF來降低開關(guān)磁阻電機的轉(zhuǎn)矩脈動。引入Tikhonov因子來實現(xiàn)離線轉(zhuǎn)矩分配函數(shù)的優(yōu)化,優(yōu)化目標(biāo)包括最小化銅耗Irms和最大化轉(zhuǎn)矩脈動速度ωmax。針對1.2 kW 12/8極開關(guān)磁阻電機進(jìn)行耦合場路仿真分析,通過可逆轉(zhuǎn)矩函數(shù)模塊將相參考轉(zhuǎn)矩轉(zhuǎn)化為相參考電流,從而避免在換相區(qū)間出現(xiàn)相電流峰值較大的情況。與傳統(tǒng)線型、立方型轉(zhuǎn)矩分配控制策略相比,該策略在提升轉(zhuǎn)矩-速度性能方面具有優(yōu)勢,增加到了近1 800 r/min,分別是線型和立方型轉(zhuǎn)矩分配控制策略的10倍和5倍多。在降低轉(zhuǎn)矩脈動率和提升電機運行效率方面,采用遺傳算法在不同轉(zhuǎn)速下選擇合適的Tikhonov因子數(shù)值,使離線轉(zhuǎn)矩分配函數(shù)和線型及立方型轉(zhuǎn)矩分配函數(shù)具有相當(dāng)?shù)你~耗,且顯著降低了轉(zhuǎn)矩脈動率。
猜你喜歡
天水行政學(xué)院學(xué)報(2022年4期)2022-11-18 09:02:36
艦船科學(xué)技術(shù)(2022年13期)2022-08-11 09:30:02
鐵道通信信號(2020年9期)2020-02-06 09:15:22
漢語世界(The World of Chinese)(2019年3期)2019-07-01 02:37:48
數(shù)學(xué)大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學(xué)科學(xué)(學(xué)生版)(2019年5期)2019-05-21 01:00:18
中學(xué)生數(shù)理化·中考版(2018年10期)2018-12-07 00:44:52
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年30期)2018-11-22 06:20:24
中央社會主義學(xué)院學(xué)報(2017年1期)2017-04-16 05:34:07
中國衛(wèi)生(2014年12期)2014-11-12 13:12:40
