永磁同步電機的等效SVPWM調制方法研究
2020-12-29 09:21:06鞠全勇
機械設計與制造工程 2020年12期
郭 語,鞠全勇
(金陵科技學院機電工程學院,江蘇 南京 211169)
隨著電機技術的發展,永磁同步電機(PMSM)替代有刷電機已經成為主流趨勢。近些年,針對PMSM的驅動控制方法在各行各業進行了廣泛的研究[1-4]。充分發揮PMSM的優勢,提高電機的控制效果一直是主要研究熱點之一[5-6]。矢量控制結合空間矢量脈寬調制(space vector pulse width modulation,SVPWM)是PMSM的主流控制方式[7-8],但傳統的SVPWM調制是在采集三相電流、經過坐標變換后再通過電壓矢量合成實現的[9],這種方式需要利用電流傳感器采集電流,并經過Clark變換、Park變換和Park逆變換進行電流環控制,因此會增加硬件成本和軟硬件的復雜度。
本文采用波形描述方法,預先生成一個電周期的SVPWM調制波形數據表,利用速度閉環輸出調制電壓幅值,結合查表法實現等效SVPWM調制控制。
1 傳統SVPWM調制原理
傳統SVPWM調制一般是基于電流檢測并結合矢量控制實現的,圖1為典型的PMSM速度閉環控制系統框圖。采集三相電流,并經過Clark變換和Park變換得到q軸電流Iq和d軸電流Id,然后分別與設定值比較計算誤差值,經過Park逆變換轉化為兩相靜止參考坐標系中的電壓Uα和Uβ,最后通過SVPWM調制輸入三相逆變器從而實現電機驅動控制。

圖1 PMSM速度閉環控制系統框圖
傳統SVPWM調制方法一般基于電壓源型三相逆變器實現,其原理如圖2所示。每一相在同一時刻只有一個橋臂會導通,設開關狀態組合Sx=[S1,S2,S3],其中S1,S2,S3分別表示上橋臂的開關狀態,0為斷開,1為導通,則不同的開關狀態可形成8種組合,對應8種電壓空間矢量。
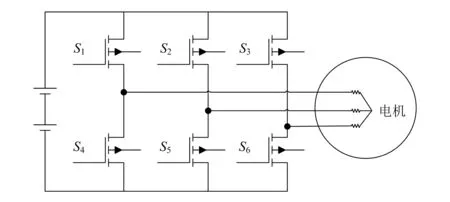
圖2 三相逆變器示意圖
將一個電周期劃分為6個扇區,每60°為一個扇區。磁鏈空間矢量可以等效為電壓空間矢量的積分[10],SVPWM的思想是控制參考電壓空間矢量Uref的軌跡為圓形,從而形成圓形磁場。將Uref分解為靜止參考坐標系中的電壓Uα和Uβ,再通過SVPWM算法計算得到電機的三相端電壓,各相端電壓均為含有三次諧波的馬鞍波,具體技術原理可參閱文獻[11],本文不再贅述。
2 等效SVPWM調制方式
為了降低軟硬件的復雜度和成本,本文利用波形生成器預先在軟件中生成一個電周期的端電壓波形數據表,通過查表法結合速度閉環控制的方式實現PMSM的速度控制,控制框圖如圖3所示。圖中ωref為設定轉速,ωfed為實際轉速,UAmp為端電壓幅值,θ為轉子當前位置角度。角度傳感器為增量式光電編碼器,采用M/T法測量電機轉速,DC為24 V直流電源,電機為四對極三相PMSM。
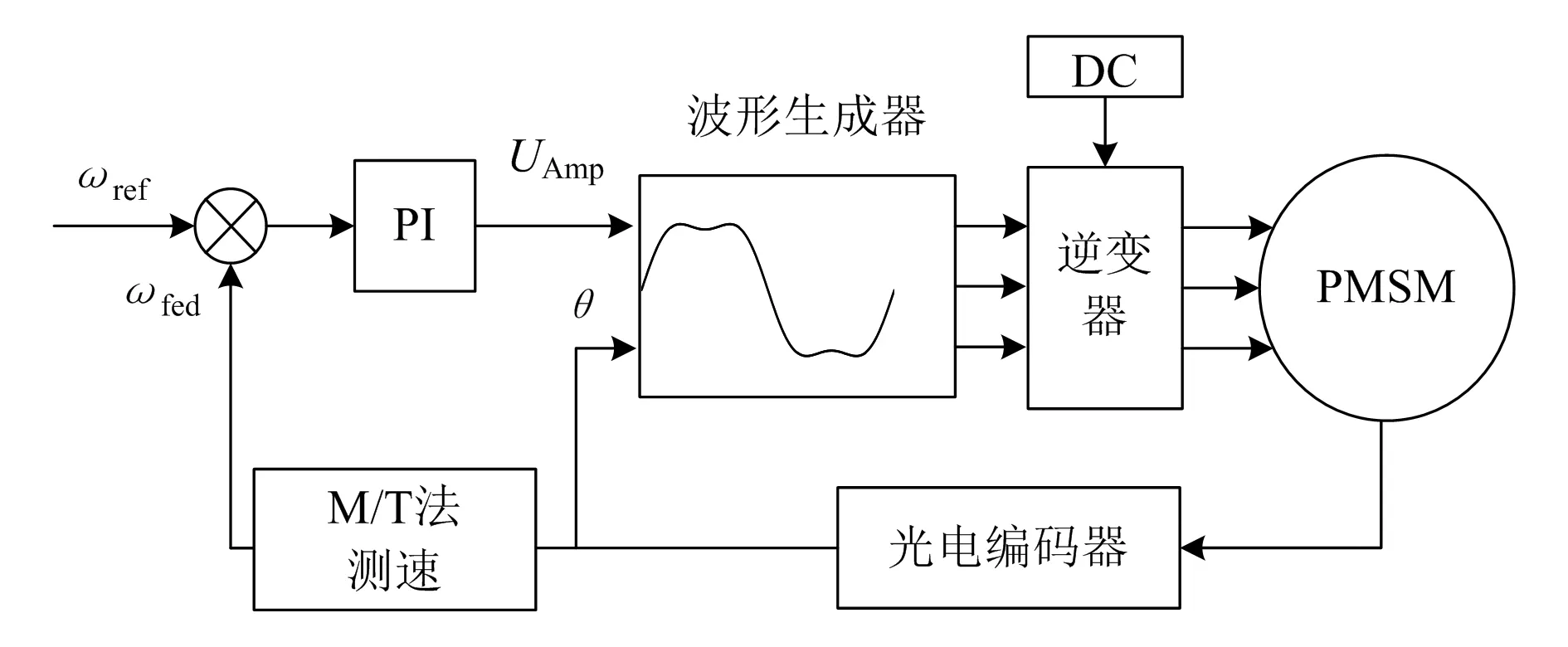
圖3 等效SVPWM調制速度控制框圖
2.1 位置與轉速計算
根據當前轉速,預設轉子轉過30°電角度所用時間T為轉速計算周期,設T時間內測得輸出脈沖數為N,編碼器每圈輸出脈沖數為M,對轉子位置角度θ及轉速ωfed進行計算,則有:
(1)
(2)
式中:θ0為上一次采樣位置角度。
2.2 波形生成器
利用WaveStar軟件對傳統SVPWM所生成的馬鞍波進行分解分析,可知波形中含有的主要分量為3次諧波,幅值為基波的21.45%,則等效SVPWM波形電壓可表示為:
UTab=sinθ+0.214 5sin(3θ)+Udc/2
(3)
式中:Udc為直流電源電壓;θ取值為0°~360°,控制程序中以1°為間隔取值,形成360個數據的電壓波形描述表。
利用角度傳感器結合式(1)、(2)得到轉子位置角度θ和轉速ωfed,通過速度環PI(比例、積分)控制器得到所需馬鞍波端電壓的幅值UAmp。將轉子位置角度和電壓幅值輸入波形描述表,輸出得到三相相差為120°的等效SVPWM調制波形,如圖4所示,圖中U、V、W分別表示輸入給電機的U相、V相、W相端電壓,A點為U相端電壓最大幅值處。
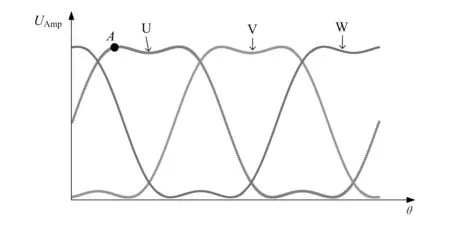
圖4 三相端電壓目標波形
本文采用ELMOS公司出品的E523.05單片機作為主控芯片實現PMSM的等效SVPWM調制控制。該型單片機主頻為48 MHz,MOS管驅動頻率為16 kHz,采用中心對稱方式生成脈沖寬度調制(pulse width modulation,PWM)波形,則PWM模塊對應的計數器最大值為:
PWMPRD=48 000 000/16 000/2=1 500
以圖4中的A點為例,設其對應的轉子位置角度為θU,所需電壓幅值為UAmp,控制程序通過PWM模塊比較器生成上下互補的兩路PWM驅動信號。同時,為了防止上下MOS管直通,加入1 μs的死區時間td。輸出的U相PWM波形如圖5所示。
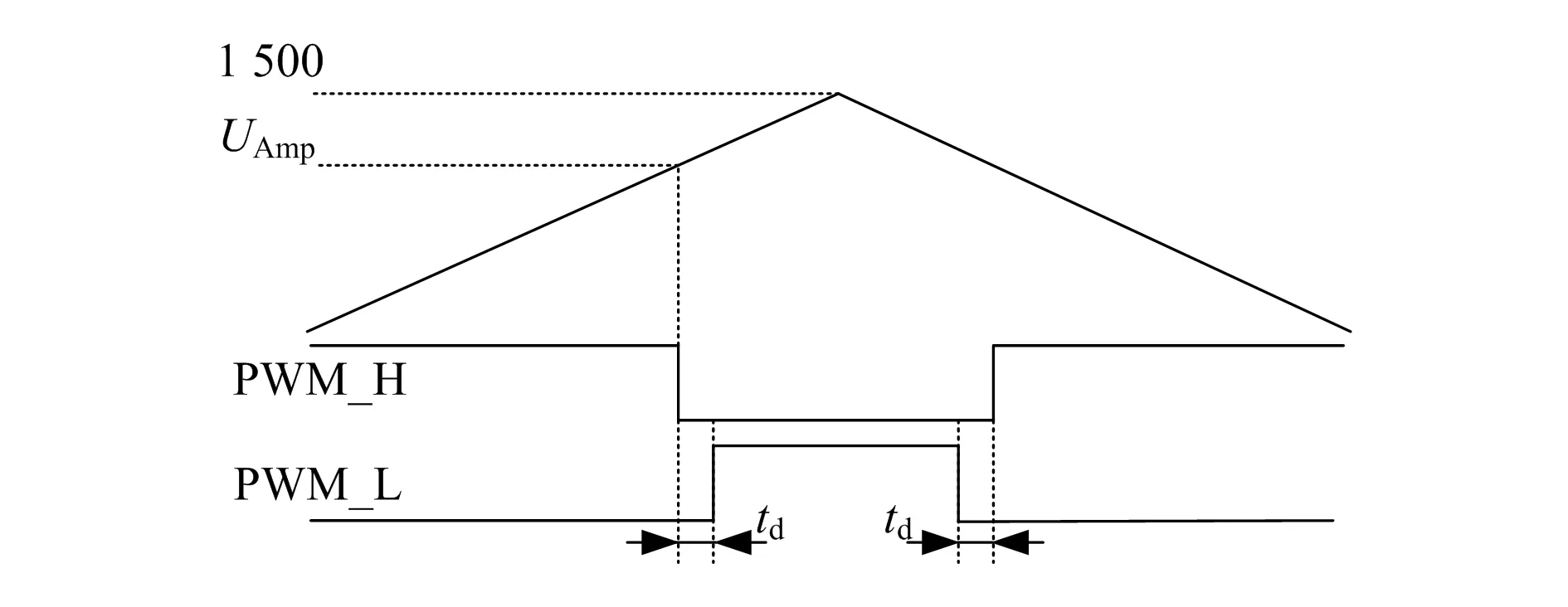
圖5 U相PWM波形
V、W兩相分別與U相相差120°、240°,轉子位置角度分別為(θU-120°)和(θU-240°),查表得到兩相所需電壓,PWM波形輸出與U相同理。基于等效SVPWM調制的速度閉環控制流程圖如圖6所示。
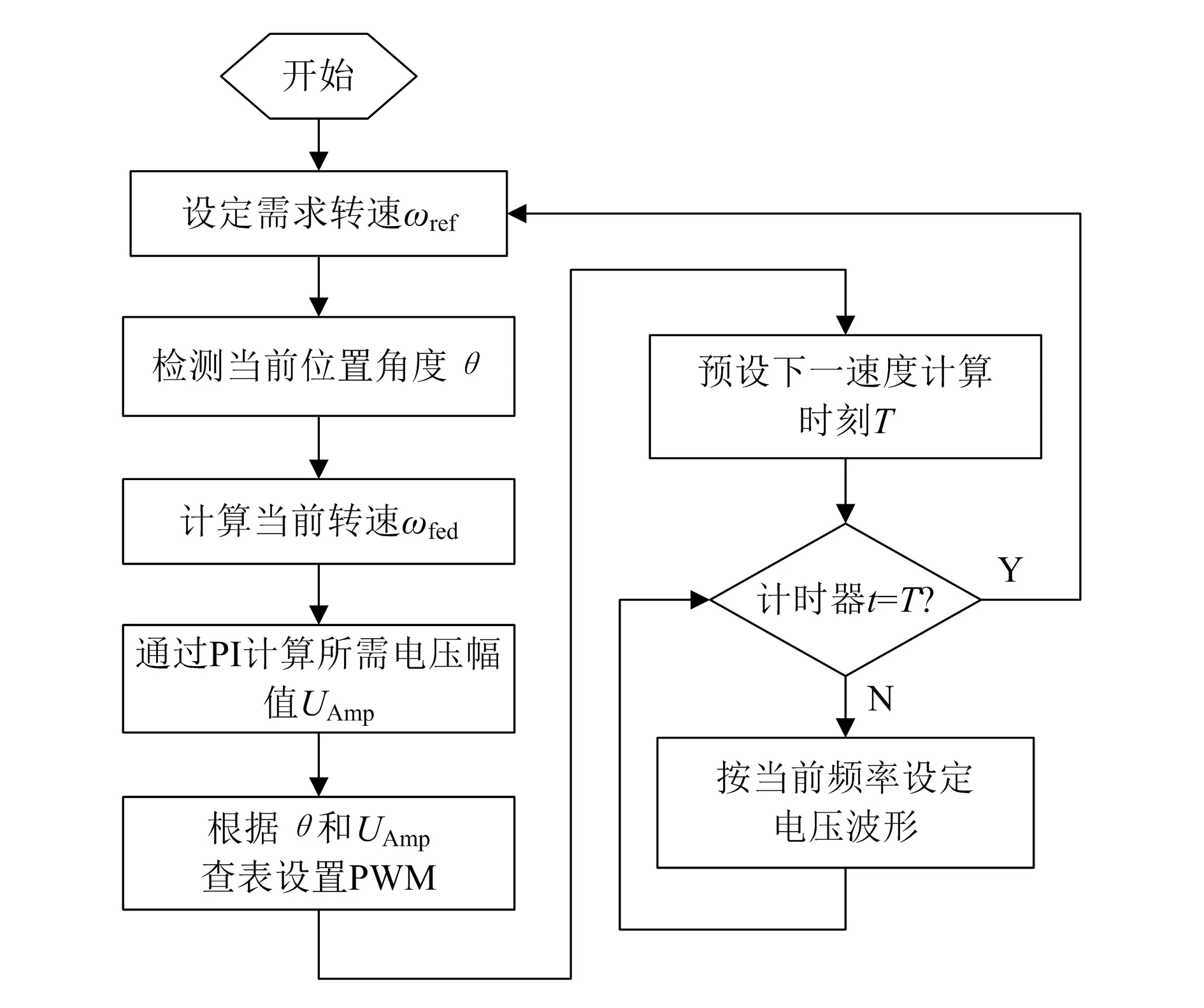
圖6 速度閉環控制流程圖
3 實驗驗證
為了驗證本文所提方法的正確性,搭建了三相PMSM控制系統,如圖7所示。設定電機轉速為2 400 r/min,以16 kHz的頻率驅動電機,DC為24 V穩壓電源。由于電機是感性負載,會導致相電流滯后于端電壓,實際控制時,速度環輸出的調制波形幅值相位需要前移一個超前角。通過多次標定實驗發現,當轉速為2 400 r/min時,超前角取值27°可使電機具有最高效率。
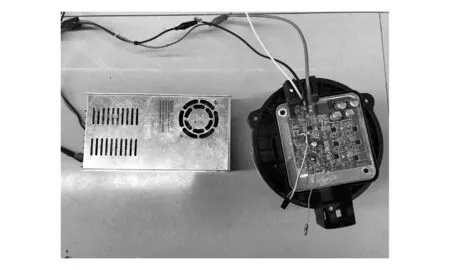
圖7 PMSM控制系統
利用示波器測量U相端電壓,同時對該相端電壓濾波,結果如圖8所示。可以看出,濾波后的電壓為標準的馬鞍波,與理論所需波形一致。圖9所示為三相濾波后的端電壓輸出波形,從圖中可以看出三相端電壓均為馬鞍波,且相位相差為120°,與理論一致。圖10所示為三相逆變器上橋MOS管輸出波形,驅動頻率為16 kHz。圖11所示為U相端電壓和相電流輸出波形,從圖中可以看出,相電流波形為正弦波,正弦性較高,表明本文所提方法可實現PMSM的穩定運行。
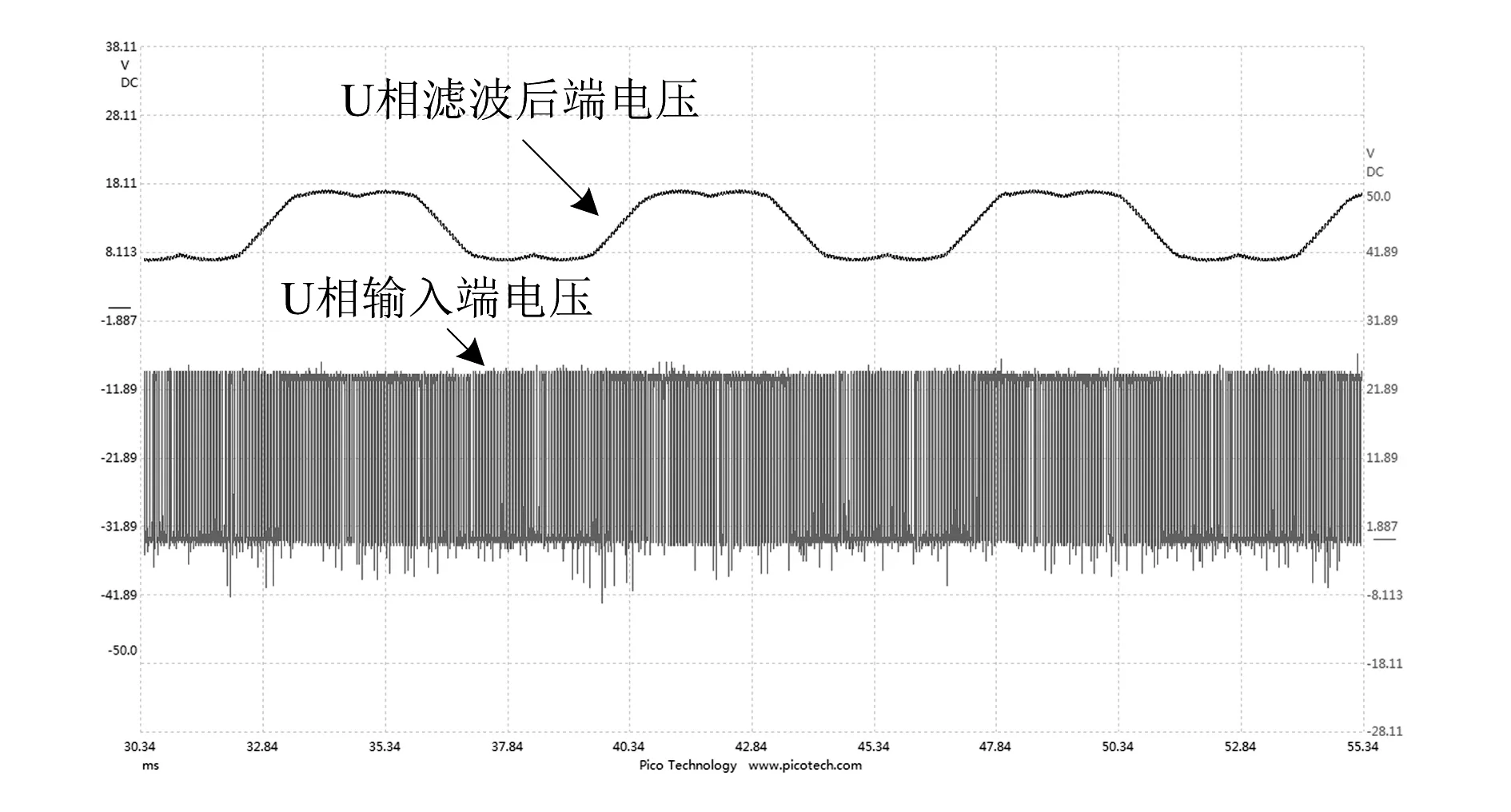
圖8 U相端電壓及濾波后的電壓
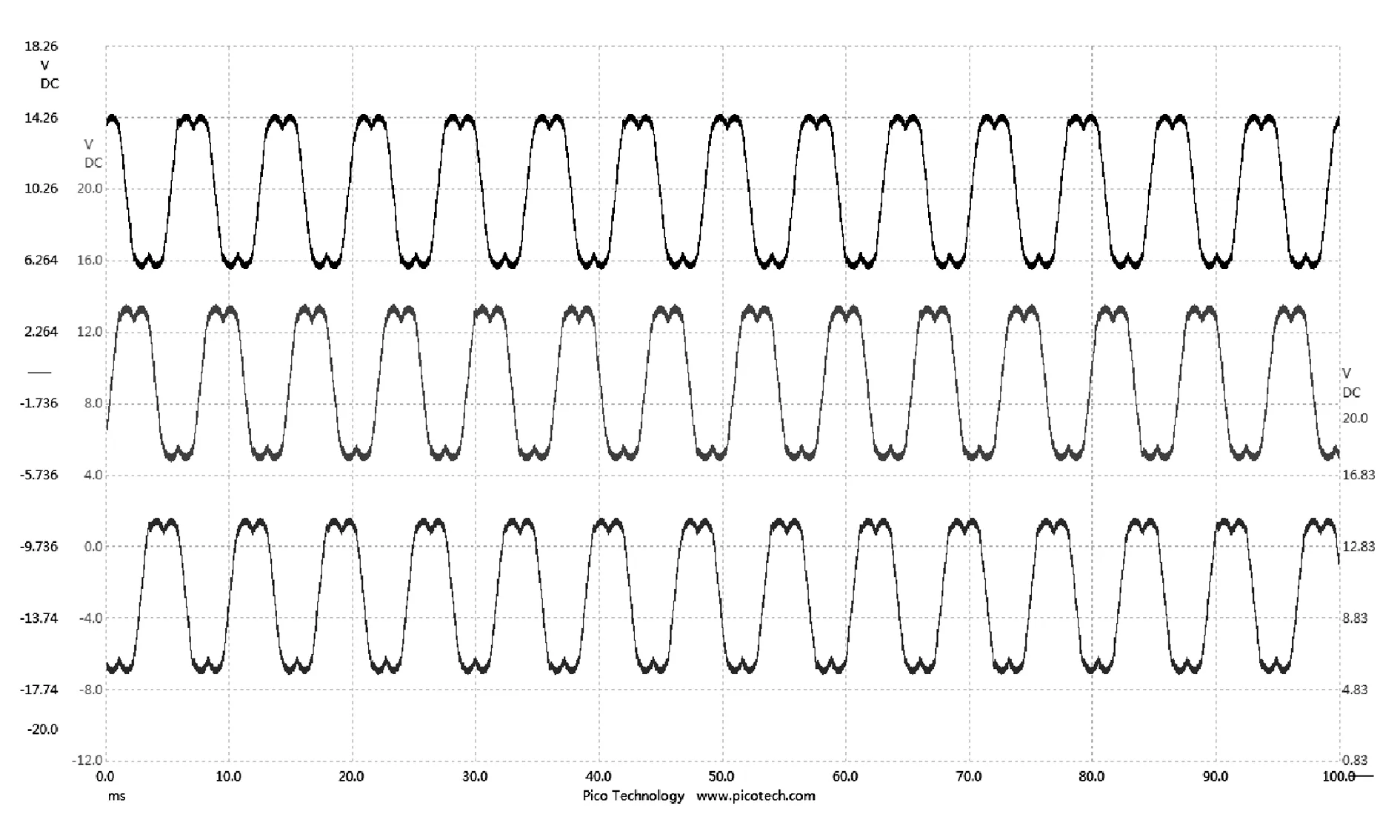
圖9 三相端電壓濾波后波形
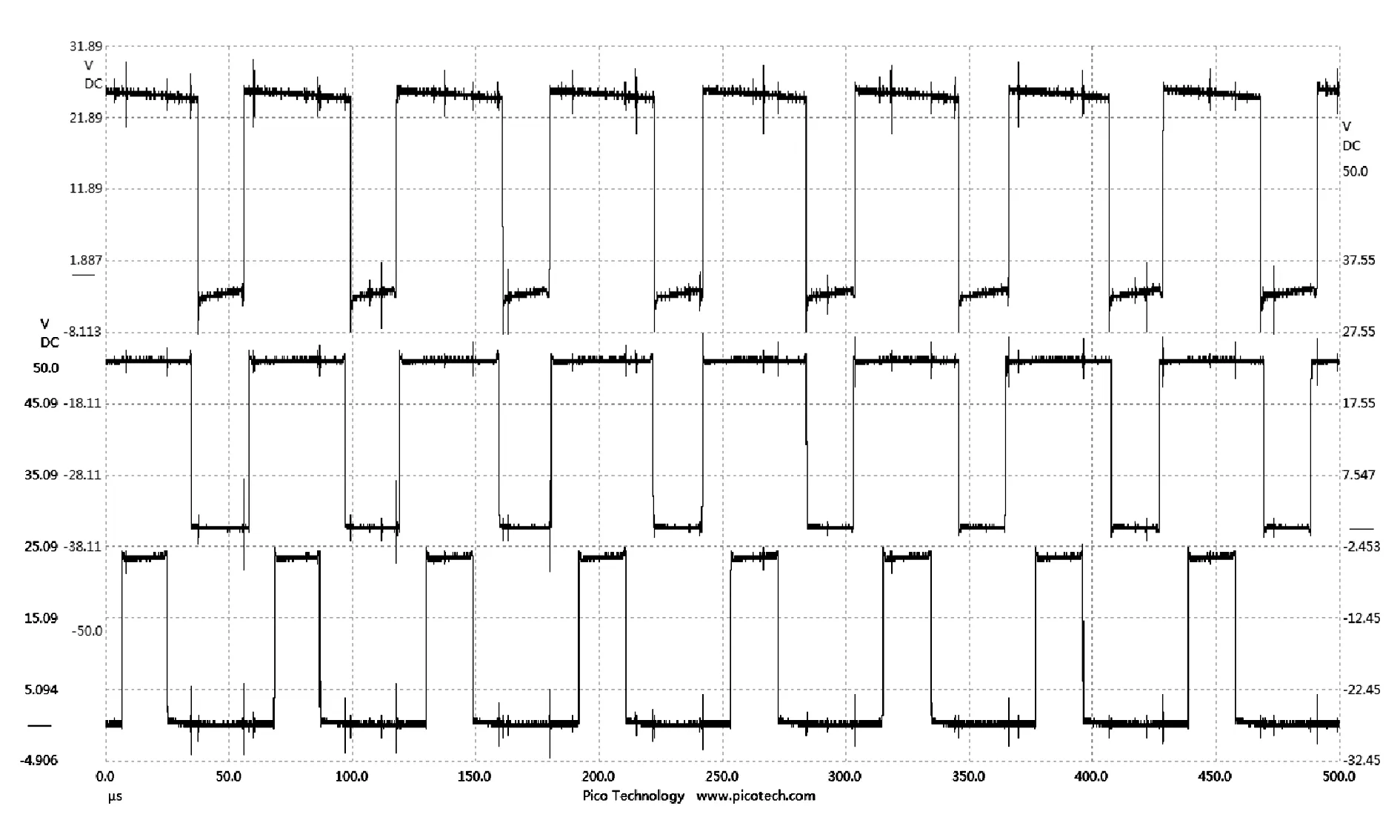
圖10 三相上橋臂MOS管輸出
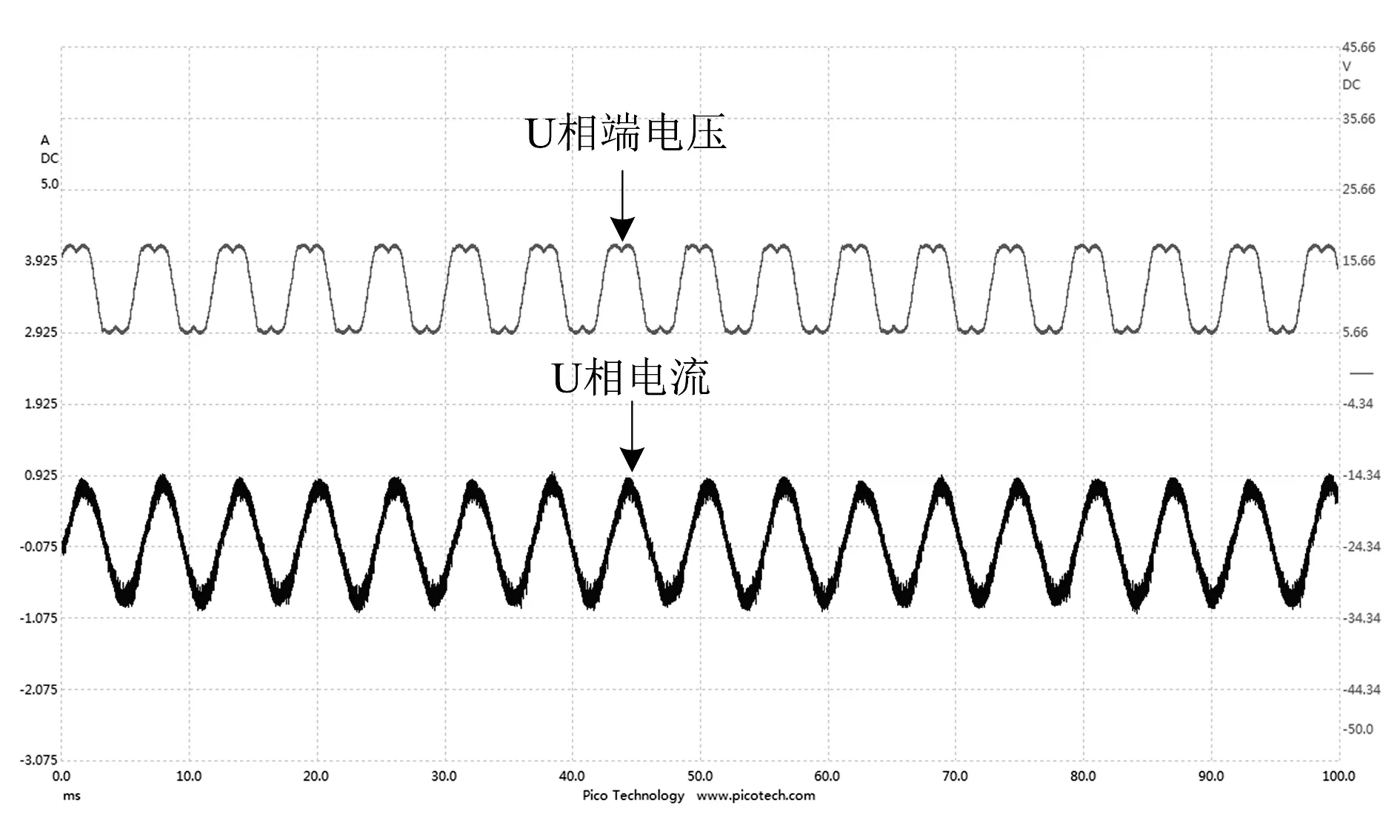
圖11 U相端電壓及相電流
4 結論
本文提出了一種等效SVPWM調制方法,并通過實驗進行了驗證,得到結論如下:
1)軟件內部預置SVPWM調制波形,通過速度環輸出作為調制波形電壓幅值,無需采集三相電流進行坐標變換,降低了硬件成本和軟硬件復雜度。
2)方法具有可行性和有效性,電機相電流正弦度較高,電機可以實現穩定運行。
