一種基于信息積累的外輻射源目標檢測方法
2020-12-31 03:33:44岑宗駿
雷達學報 2020年6期
關鍵詞:檢測
李 波 岑宗駿 湯 俊
(清華大學電子工程系 北京 100084)
1 引言
隨著電子信息技術的不斷發展,傳統的有源雷達系統不僅面臨著隱身飛機、反輻射導彈等先進軍事設備帶來的重大威脅,還需要面對超低空突防、綜合電子干擾等高超作戰手段的嚴峻挑戰。外輻射源雷達系統是指本身不發射能量,而是被動地接收目標反射的空間電磁環境中已經存在的外部輻射源發射的電磁信號來進行目標檢測與跟蹤的雷達系統。外輻射源雷達系統沒有大功率的發射源,隱蔽性好,具有強大的生存能力和潛在的反隱身、低空探測功能,具有傳統有源雷達系統無法比擬的優點,在國防領域的發展前景十分廣闊,是世界各國的學者研究的熱點[1–3]。
在雷達目標檢測中,最常用的算法是恒虛警(Constant False Alarm Rate,CFAR)檢測算法[4]。這是一種跟蹤前檢測(Detect-Before-Track,DBT)算法,根據奈曼-皮爾遜(Neyman-Pearson,NP)準則計算出閾值,對單幀雷達回波信號進行閾值判決。然而不同于傳統的有源雷達系統,外輻射源雷達系統的發射功率和發射波形不可控,目標回波的信噪比(Signal-to-Noise Ratio,SNR)通常比較低,過高的閾值會導致信噪比較低的目標無法被檢測,若降低閾值,則會產生過多的虛假點跡,降低算法的實時性。
為了有效地對低信噪比的弱目標進行檢測,形成了一類檢測前跟蹤(Track-Before-Detect,TBD)算法。這類算法并不直接對單幀數據進行閾值判決形成點跡,而是利用目標的運動特征沿著可能的運動軌跡進行多幀回波信號的能量積累,在此基礎上實現微弱目標的檢測和跟蹤。傳統的TBD算法主要包括霍夫變換、動態規劃和粒子濾波等方法。基于霍夫變換[5]的弱目標檢測算法能實現簡單的直線運動軌跡的弱目標檢測,但對于機動目標的檢測性能較差。基于動態規劃[6,7]的弱目標算法將多幀目標軌跡估計問題轉化為單幀的最優狀態估計問題,能對機動目標進行軌跡估計,但對狀態空間中的每一個狀態進行遍歷操作導致動態規劃算法計算復雜度高,運行時間長。而且,基于動態規劃和基于霍夫變換的弱目標檢測算法都是批處理算法,需要等待多幀觀測數據才能開始處理,實時性較差。
TBD算法的另一種重要實現方式是遞歸實現,無需等待多幀觀測數據。遞歸算法[8–12]以貝葉斯濾波為代表。然而除了某些特殊情形,貝葉斯濾波難以在連續的狀態空間中得到精確的解析解。一種解決方式是將連續狀態空間進行離散格點化,遞推計算后驗概率密度函數在離散目標狀態格點上的取值[13]。離散格點貝葉斯濾波的方法實現簡單,在進行目標檢測時,通常將目標不存在作為一種特殊的狀態添加到狀態空間中,需要建立目標存在和目標不存在兩種狀態之間的轉移概率模型,而轉移概率模型的好壞直接影響著目標檢測性能。貝葉斯濾波另一種常用的逼近實現形式是粒子濾波[14]。粒子濾波算法通過尋找一組在狀態空間傳播的隨機樣本來逼近后驗概率密度函數,按時間遞推地更新隨機樣本和相應的權值,進而可以遞推地通過近似的后驗概率密度函數對目標的狀態進行估計,從而實現弱目標的檢測和跟蹤。粒子濾波能夠有效地解決觀測非線性問題,但需要大量的粒子來保證其濾波性能,導致算法的計算復雜度較高,運行時間較長,難以保證外輻射源雷達系統中目標檢測較高的實時性需求。
外輻射源雷達系統利用各種民用或者商用信號作為輻射源,通常工作在較低的頻段,波長較長。基于外輻射源雷達系統的目標檢測特點,針對上述問題的不足,為了提高目標檢測算法的實時性,同時保證算法的檢測性能,本文對目標狀態空間進行離散網格化處理,結合經典的遞推貝葉斯濾波的思想在多幀觀測數據之間進行信息的傳遞和積累,提出了一種實現簡單、計算復雜度低、可并行度高的基于信息積累的外輻射源目標檢測方法。該算法引入了信息論中常用的信息熵對目標狀態的不確定度進行度量,并利用信息熵作為目標是否存在的判決條件,避免了對目標存在和目標不存在兩種狀態之間轉移概率的先驗建模,減少了算法的超參數。最后通過仿真實驗和對實測數據的處理驗證了算法的有效性和實時性。
本文中,(·)T和 (·)?分別表示向量或矩陣的轉置和共軛操作。本文內容安排如下:第2節對外輻射源雷達系統進行建模,第3節介紹基于信息積累的目標檢測算法,第4節給出實驗結果,第5節進行總結。
2 外輻射源系統模型
外輻射源雷達工作場景示意圖如圖1所示。分別用xe,xr,x(t)表示輻射源、雷達接收機和目標所在位置的三維笛卡爾空間坐標;v(t)表示目標的運動速度矢量;s(t)表示輻射源連續發射的復基帶信號。
為簡單起見,假設參考通道接收到的直達波信號經過處理后能夠恢復出發射信號s(t),回波通道接收信號經過處理后所包含的直達波和其他雜波被成功濾除,則回波信號可以建模為[2]

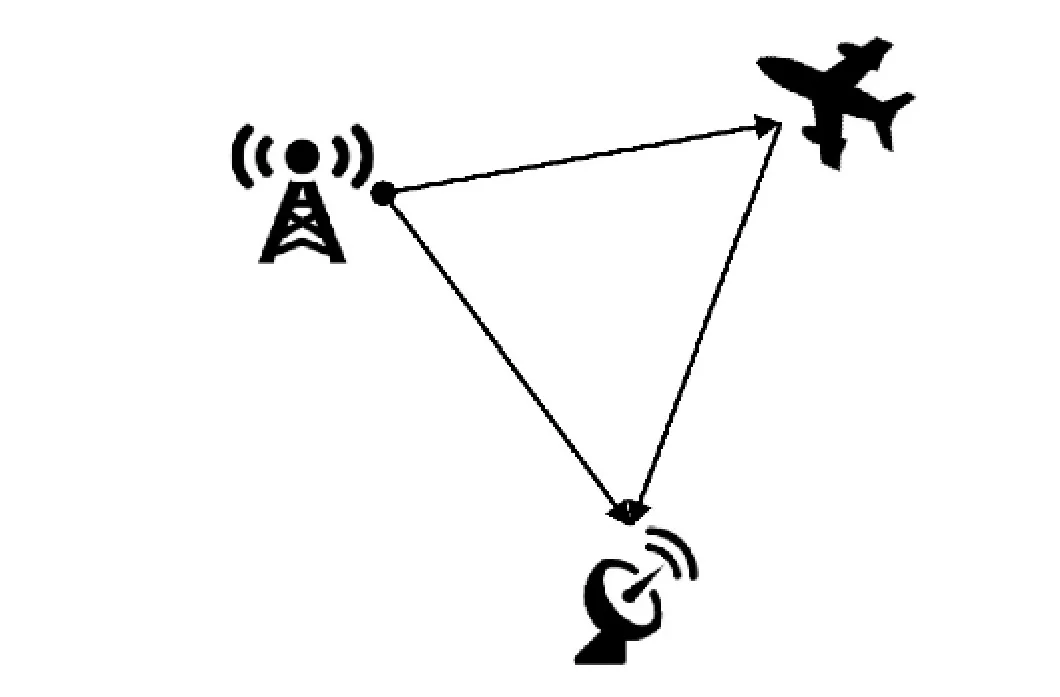
圖1 外輻射源雷達工作場景示意圖Fig.1 Working principle for passive radar
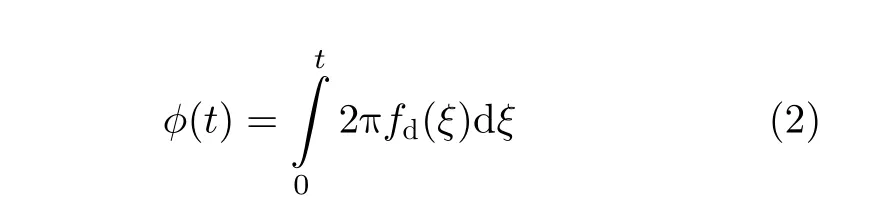
其中,A(t),φ(t),τ(t),fd(t)分別代表幅度、相位、延時和多普勒頻移;w(t)是均值為0,方差為σ2的加性復高斯白噪聲。延時和多普勒頻移可以通過式(3)和式(4)來計算[2]

其中,c為光速,fc為載波頻率。
定義模糊函數
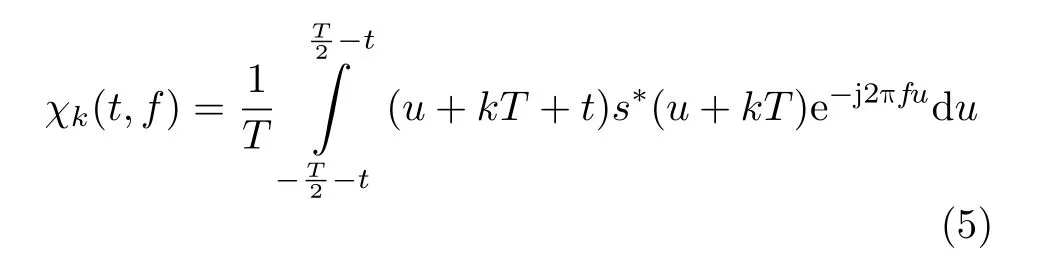
將回波信號與參考信號進行相參積累處理,結果如式(6)所示。
3 基于信息積累的目標檢測算法
經典的遞推貝葉斯濾波過程分為兩步:預測步和更新步[13]。假設已知k–1時刻的概率密度函數p(xk?1|z1:k?1),k時刻得到新的觀測值zk,預測過程利用過去的觀測結果z1:k?1對目標狀態xk進行預測得到概率密度函數p(xk|z1:k?1),更新過程利用新的觀測值zk去更新概率密度函數p(xk|z1:k)。
基于信息積累的目標檢測算法利用經典的遞推貝葉斯濾波的思想,首先將目標狀態空間離散化,與式(11)中的觀測結果相對應,目標狀態在式(12)所示的笛卡爾積中取值。

定義符號xi,j?(i,j),當目標狀態取值xk=xi,j時,對應的延時為ti,多普勒頻移為fj。因此概率密度函數p(xk?1|z1:k?1)可以用式(13)來表示。
若目標勻速運動,則目標信息傳遞矩陣T與時刻k無關,具有齊次性;若目標非勻速運動,則目標狀態變化為非齊次1階馬爾科夫過程,目標信息傳遞矩陣Tk隨時刻k變化,反映目標運動的機動性。獲取目標信息傳遞矩陣Tk有多種靈活的方式,可以根據已知目標的先驗信息預先存儲,或者按照目標狀態空間劃分的網格設置多個通道,也可以利用跟蹤的信息反饋進行實時更新。
預測過程得到概率密度函數p(xk|z1:k?1)如式(17)所示。
得到最終的概率密度函數p(xk|z1:k)如式(24)所示。
至此得到了狀態變量xk的離散概率分布,式(26)所示的信息熵反映了目標狀態在k時刻的不確定度。

假設初始時刻x0為均勻分布,無任何觀測數據時目標狀態的不確定性最大;隨著觀測數據的增加,獲取到更多關于目標狀態的信息,目標狀態的不確定性下降,熵值下降。當目標狀態的確定度達到一定水平,即熵值下降到一定門限的時候,判定當前時刻存在目標。假設判決門限為Hthr,如果Hk <Hthr,判定目標存在;如果Hk ≥Hthr,判定目標不存在。
基于信息積累的目標檢測方法總結如表1所示。
4 實驗結果
4.1 仿真實驗
本節實驗仿真選擇調頻廣播信號作為外輻射源,利用軟件無線電平臺接收北京地區載波頻率為97.4 MHz的一段調頻廣播信號,經過解調后得到的基帶復信號作為發射信號s(t),采樣頻率fs=200 kHz。調頻廣播信號的模糊函數如圖2所示,接近于理想的“圖釘型”函數,適用于作為目標檢測的外輻射源。
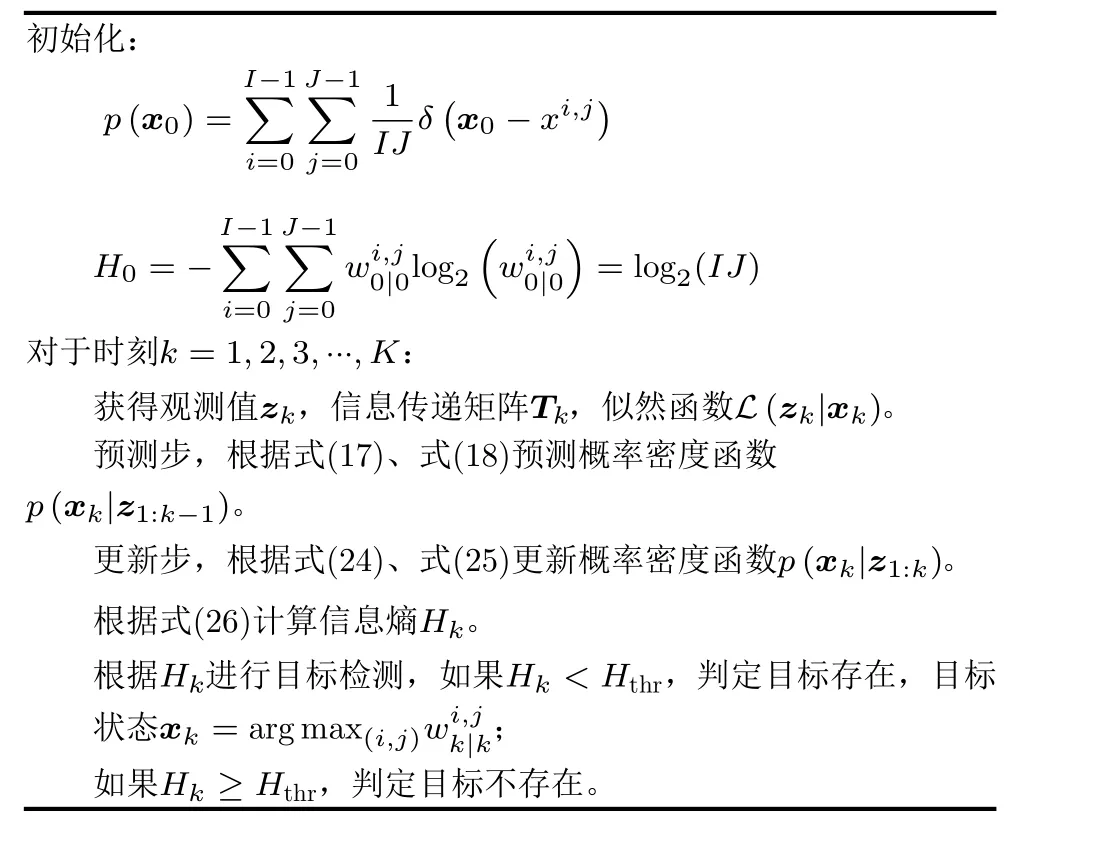
表1 基于信息積累的目標檢測方法Tab.1 The method of target detection based on information accumulation
外輻射源的位置xe=(0,-75e3,300)Tm,雷達接收機的位置xr=(0,0,70)Tm。
相參積累的時間T=0.5 s,即每一幀對應的時間間隔為0.5 s。將每一幀劃分為500個子段,每一個子段對應的時間間隔為1 ms。按照這種處理方式,可以計算出延時單元的個數I=200,t0=0 s。多普勒頻移單元的個數J=500,f0=-500 Hz,對應的頻率區間為[-500,500) Hz。
(1) 仿真場景1
本場景主要研究虛警概率與信息熵判決門限的關系。總共觀測2000幀數據,數據中不包含目標,只包含背景噪聲。調整信息熵的判決門限,統計其虛警概率,虛警概率的計算方式為判決目標存在的幀數占總的觀測幀數的比例。對每個判決門限都進行200次蒙特卡羅仿真實驗,得到的虛警概率pf隨信息熵判決門限Hk的變化曲線如圖3所示。
(2) 仿真場景2
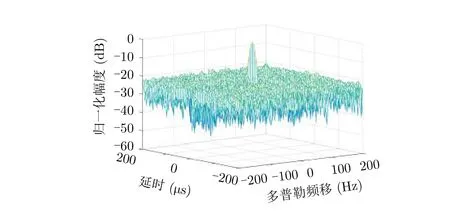
圖2 調頻廣播信號模糊函數Fig.2 The ambiguity function of FM broadcast signal
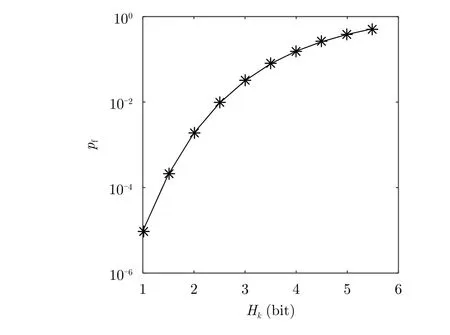
圖3 虛警概率隨判決門限變化曲線Fig.3 Relationship of the probability of false alarm and threshold
本場景主要對比分析不同算法的運行時間和檢測性能。考慮的是單目標直線運動的場景,總共觀測50幀數據,目標第1幀開始出現,一直持續到第50幀。目標初始位置位于(50,60,1)Tkm,保持勻速直線運動,運動速度v=(-180,-120,-2)Tm/s。目標散射截面積按照Swerling I型起伏,均值為10 m2。噪聲設置為零均值加性復高斯噪聲,調整噪聲功率,使得所對應的觀測數據的平均信噪比隨之變化。
為了對比不同算法的性能,選擇文獻[10]中介紹的粒子濾波算法,新生粒子數設置為 2000,存活粒子數設置為 2000。除此之外,文獻[16]中介紹的動態規劃算法以及離散格點貝葉斯濾波算法也用于對比,目標新生概率設置為0.9,目標消亡概率設置為0.1。而作為對比的經典DBT檢測算法選擇單元平均恒虛警算法(Cell Averaging Constant False-Alarm Rate,CA-CFAR),參考單元設置為16,保護單元設置為2。
選擇各個算法的參數,使得各個算法在不含目標的背景噪聲下的虛警概率保持一致,設置為1E-5。然后針對每個信噪比的數據,獨立地進行 200 次蒙特卡羅仿真實驗,統計各個算法在不同信噪比下的檢測概率,檢測概率的計算方式為目標被成功檢測的幀數占總觀測幀數的比例,得到的目標檢測概率pd隨信噪比變化曲線如圖4所示。
平均單幀檢測的運行時間對比如表2所示,處理器平臺為Intel?CoreTMi7-8750H 型號的12核CPU,主頻為2.20 GHz;軟件平臺為Matlab R2018b。
由于只對判決為目標存在的幀進行狀態估計,因此在對比不同算法的目標位置的估計精度時,只考慮判決為目標存在的所有幀的集合K,而不考慮其他判決為目標不存在的幀。按式(27)統計目標位置估計的均方根誤差 (Root Mean Square Error,RMSE)。其中,N為集合K中元素的個數,為第k幀目標位置的估計值,rk,0為第k幀目標的真實位置。目標位置估計的均方根誤差隨信噪比的變化曲線如圖5所示。


圖4 目標檢測概率隨信噪比的變化曲線Fig.4 Relationship of the probability of target detection and SNR

表2 多種目標檢測算法的運行時間對比Tab.2 Comparison of running time among multiple target detection algorithms
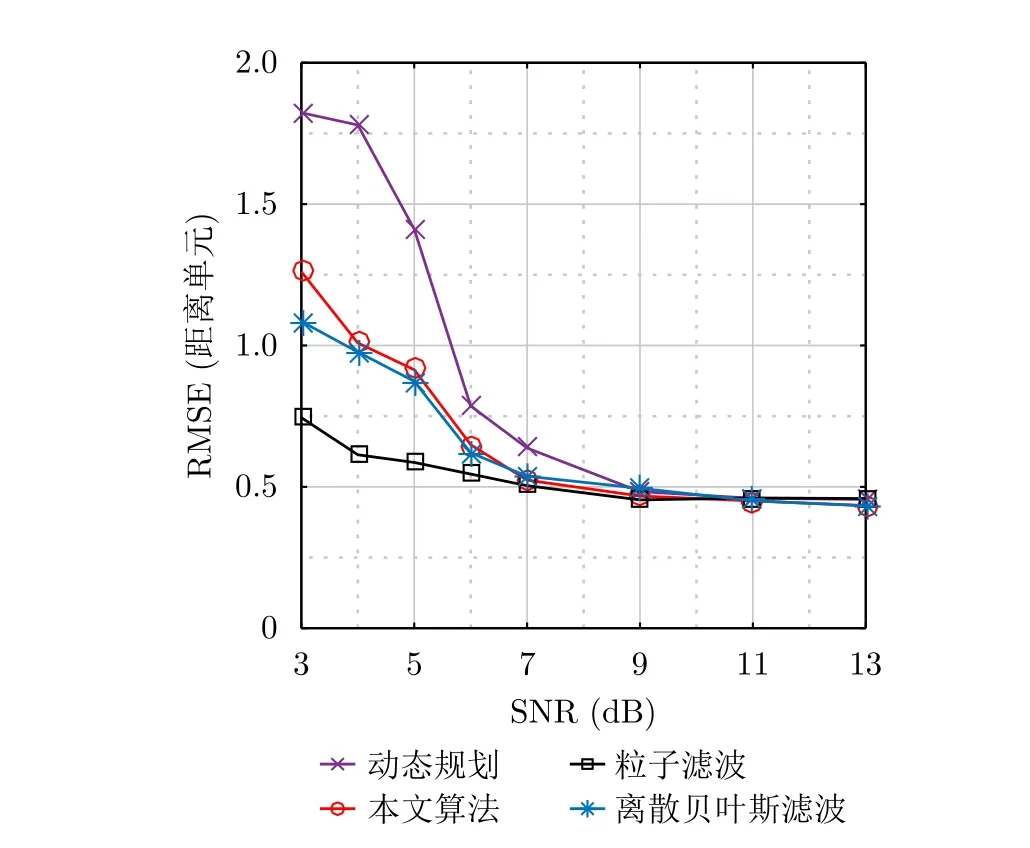
圖5 目標位置估計的均方根誤差隨信噪比的變化曲線Fig.5 Relationship of the RMSE and SNR
對比不同算法的檢測結果和運行時間可以看出,傳統的跟蹤前檢測算法運行時間較快,但由于沒有信息的積累,只有在單幀的觀測信號的信噪比足夠高時才能把目標檢測出來;相比于跟蹤前檢測算法,檢測前跟蹤算法的檢測性能得到了一定程度的提升。其中,動態規劃算法的檢測概率較高,但在低信噪比下的估計精度欠佳;動態規劃算法需要對狀態空間進行遍歷,運行時間比較長,而且批處理的方法會造成檢測的滯后;粒子濾波算法的檢測和估計性能都比較好,但需要大量的粒子來保證其濾波性能,計算復雜度高,運行時間也比較長;本文所提的基于信息積累的目標檢測算法與離散格點貝葉斯濾波算法的檢測和估計性能接近,在估計精度和計算效率之間進行了折中,兩種算法的估計精度都略差于粒子濾波算法,但同時算法的計算復雜度和運行時間也低于粒子濾波算法,保證了目標檢測算法的實時性需求。而另一方面,相比于離散格點貝葉斯濾波算法,本文所提的基于信息積累的目標檢測算法避免了對目標存在和目標不存在兩種狀態之間轉移概率的先驗建模,實現更為簡單。
(3) 仿真場景3
式(20)的計算需要首先估計噪聲,然后根據預設目標的信噪比通道去計算目標幅度。本小節考慮預設目標的信噪比通道與實際目標信噪比不匹配的場景,仿真目標的運動參數與仿真場景2一致。匹配情形將信噪比通道預設為仿真目標的信噪比,失配情形將信噪比通道預設為固定值10 dB。選擇算法參數使得兩種情形下的虛警概率相同,并比較其檢測概率和估計精度。檢測概率隨信噪比的變化曲線如圖6所示,目標位置估計精度隨信噪比的變化曲線如圖7所示。可以看出,當預設的信噪比通道與真實目標的信噪比高6~7 dB時,目標的檢測概率與估計精度有略微的下降;而當預設的信噪比通道與真實目標的信噪比的差異在3 dB以內時,失配對目標的檢測概率與估計精度幾乎不造成影響,說明算法具有一定的魯棒性。
4.2 實測數據處理
本小節通過對實測數據的處理驗證基于信息積累的目標檢測算法的有效性,所選用的實測數據來自于實際的基于調頻廣播信號的外輻射源雷達系統的接收數據。調頻廣播信號的帶寬為80 kHz,系統采樣頻率fs=200 kHz。相干積累的時間T=1 s,即每一幀對應的時間間隔為1 s;將每一幀劃分為1000 個子段,每一個子段對應的時間間隔為1 ms。截取目標附近的距離多普勒結果進行處理,包括100個距離單元,200個多普勒單元,目標的平均信噪比為6 dB,總共觀測25 幀數據。
信息熵隨時間k變化曲線如圖8所示,可以看出目標經過一定時間的信息積累后被成功檢測出來。目標的距離和多普勒頻移的估計結果分別如圖9和圖10所示。從目標狀態的估計結果可以看出本文所提方法能有效地檢測出實測數據中的目標。
5 結束語
針對外輻射源雷達系統目標檢測的問題,為了簡化檢測算法的復雜度,提升檢測算法的實時性能,本文首先對外輻射源雷達系統的目標狀態和觀測數據進行了建模分析,然后把目標狀態空間離散網格化,在此基礎上結合貝葉斯濾波的思想在多幀觀測數據之間進行信息的傳遞和積累,提出基于信息積累的外輻射源目標檢測算法,并引入信息熵作為目標是否存在的判決依據,最后通過仿真實驗和實測數據處理驗證了算法的有效性和高效性。
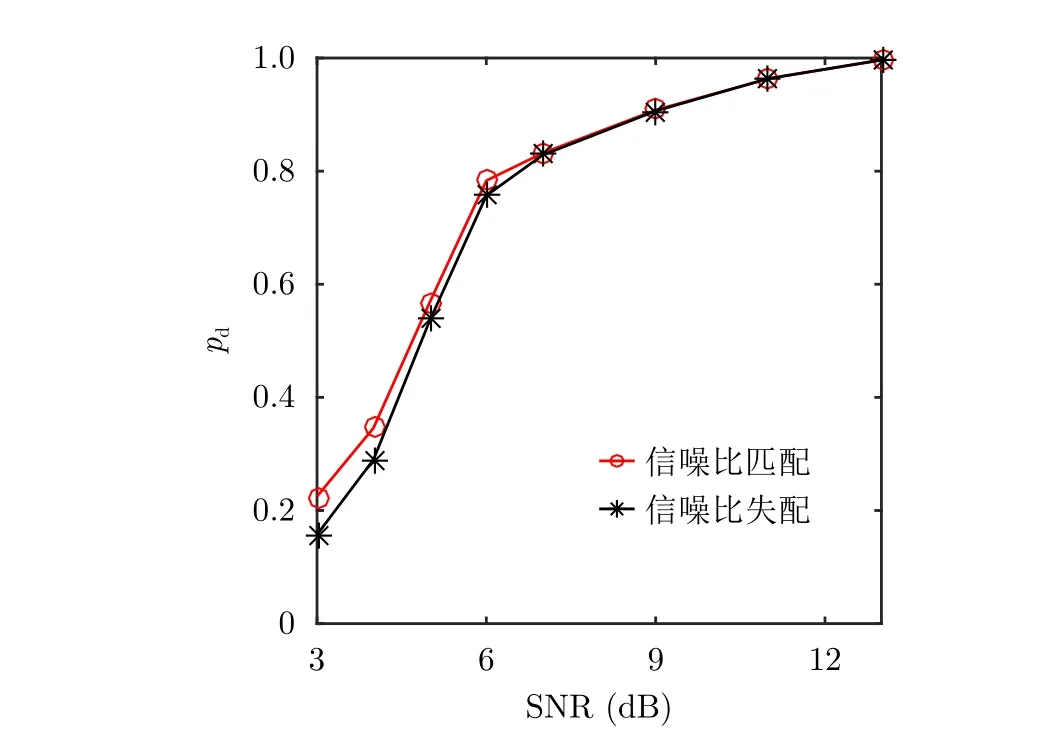
圖6 目標檢測概率隨信噪比的變化曲線Fig.6 Relationship of the probability of target detection and SNR
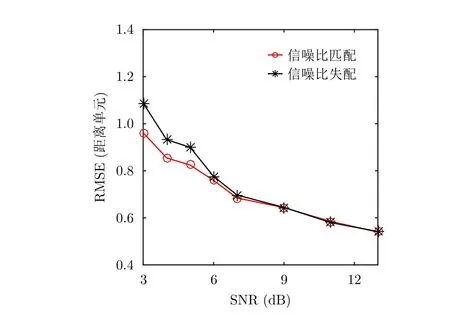
圖7 目標位置估計的均方根誤差隨信噪比的變化曲線Fig.7 Relationship of the RMSE and SNR
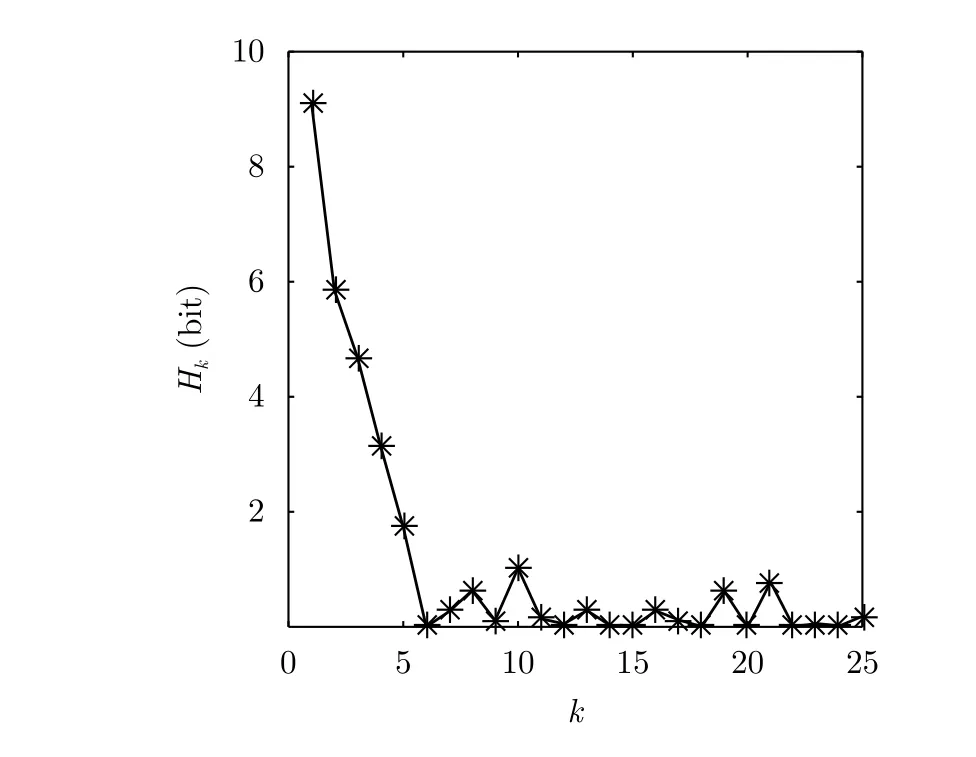
圖8 信息熵隨時間變化曲線Fig.8 Relationship of the information entropy and time
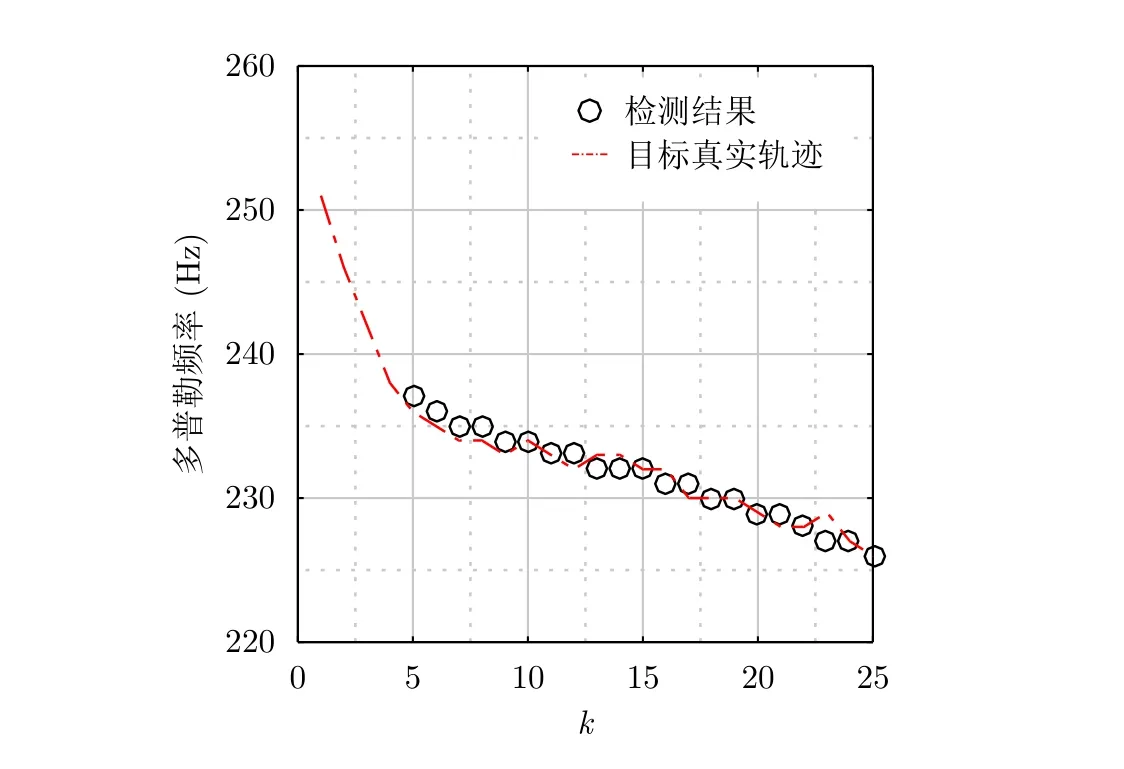
圖10 目標多普勒頻移的估計結果Fig.10 The results of the estimated target Doppler frequency
為簡化分析,本文僅仿真了復高斯噪聲的情形,未來的工作將針對更復雜的背景雜波下的檢測性能作進一步的分析,并將算法擴展到多目標的情形。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48