多自由度機械臂的智能控制策略設計研究
2021-01-03 14:12:13趙郅滔謝清全
科技信息·學術版 2021年35期
關鍵詞:智能控制
趙郅滔 謝清全
摘要:多自由度機械使用期間,動態變化的模型參數、難以預知的噪聲干擾,導致當前策略難以滿足控制要求。基于此,本文提出滑模自適應智能控制策略改進方案,參考動力方程,分析控制誤差產生的原因,設計出可調整擾動數據的模型。以此避免收斂性誤差影響、非奇異性誤差影響,設計出來的積分滑模面,可避免非連續項引發的誤差影響,并設計雙冪次逼近滑模。借助仿真實驗,驗證改進滑膜控制策略,確保控制精度、自適應能力,以此將自由度機械臂控制穩定與速度提升,確保自由度機械臂抗擾動能力的提升。
關鍵詞:自由度機械臂;智能控制;策略制定
自人工智能、機器人技術推廣,機械臂在航空、醫療與工業等領域得到了廣泛使用[1]。其可結合任務需求,借助控制策略,完成軌跡作業。自由度機械臂動作軌跡控制較為復雜,模型參數變化較大,計算模型存在這明顯的非線性、外界擾動未知等問題,對控制性能有著嚴重影響。本文綜合考慮系統動態時變、耦合性與輸入犢復雜等特性,引入滑膜控制,借助魯棒性與解耦性,提升響應速度,優化自由度機械臂的控制,提升控制效果。
1 自由度機械臂數學模型
多自由度機械臂控制系統內,動力方程為先高度非線性特性,可呈現明顯的動態非協調性,這也是影響自由度機械臂精準控制的根本原因。若未能建設精準的模型,即便是小參數變化,也會對控制效果產生影響。基于此,針對自由度機械臂動力特性,設計針對性的數學模型,其方程如下:
θ代表機械臂關節角度;M(θ)代表相應慣性;G(θ)代表相應重力; 代表相應離心性; 代表加速度。方程右側t代表機械臂受到的控制力矩,td代表機械臂受到的擾動力矩。結合多角度機械臂動力方程可得知,納入了擾動參數,但由于無法精準獲取擾動量,進而在機械臂運動階段,任何參數均無法擾動,會對控制性能產生影響。基于此,就參數擾動特性,設計參數自我調整模型:
式子中,M0(θ)代表擾動之前的參數;G0(θ)代表擾動補償參數; 代表擾動補償參數。將系統受到的擾動參數調整偏差整體視作d0,多角度機械臂狀態模型可描述為:
2 自適應滑膜控制策略設計
為精準描述模型參數誤差帶來的影響,在傳統的滑膜控制基礎上,本文設計出積分滑模面,主要如下:
為機械臂角度誤差; 為角速度誤差; 為誤差系數, 為誤差系數; 與 之間滿足關系式 = (1- )。在此滑模面基礎上,選擇非奇異處理,能夠將控制系統的輸入劃分到等效控制Uep,擾動控制Usmc,Uep求解,可根據積分滑模面、系統誤差計算,計算式:
Uep計算并沒包含非奇異項,可避免奇異性對性能的影響。除此之外,本文咋建設滑模控制期間,選擇積分滑膜,避免滑膜收斂停滯現象的出現。在滑膜逼近時,比如:包含非連續項處理,會導致控制結果產生振蕩,且對控制效果產生影響,使得生命周期大幅度的縮短。在采取取冪次逼近,能夠將取冪次逼近性能改善。基于此,本文設計取冪次逼近:
為正定矩陣, 為正定矩陣;
與 滿足關系式 =2- 。結合之前公式,可計算擾動控制Usmc,計算式為:
此時,整理可獲得多自由度機械臂滑膜控制規律,主要如下:
所對應的自由度機械臂滑膜自適應控制模型,見下圖1。
3 實驗與結果分析
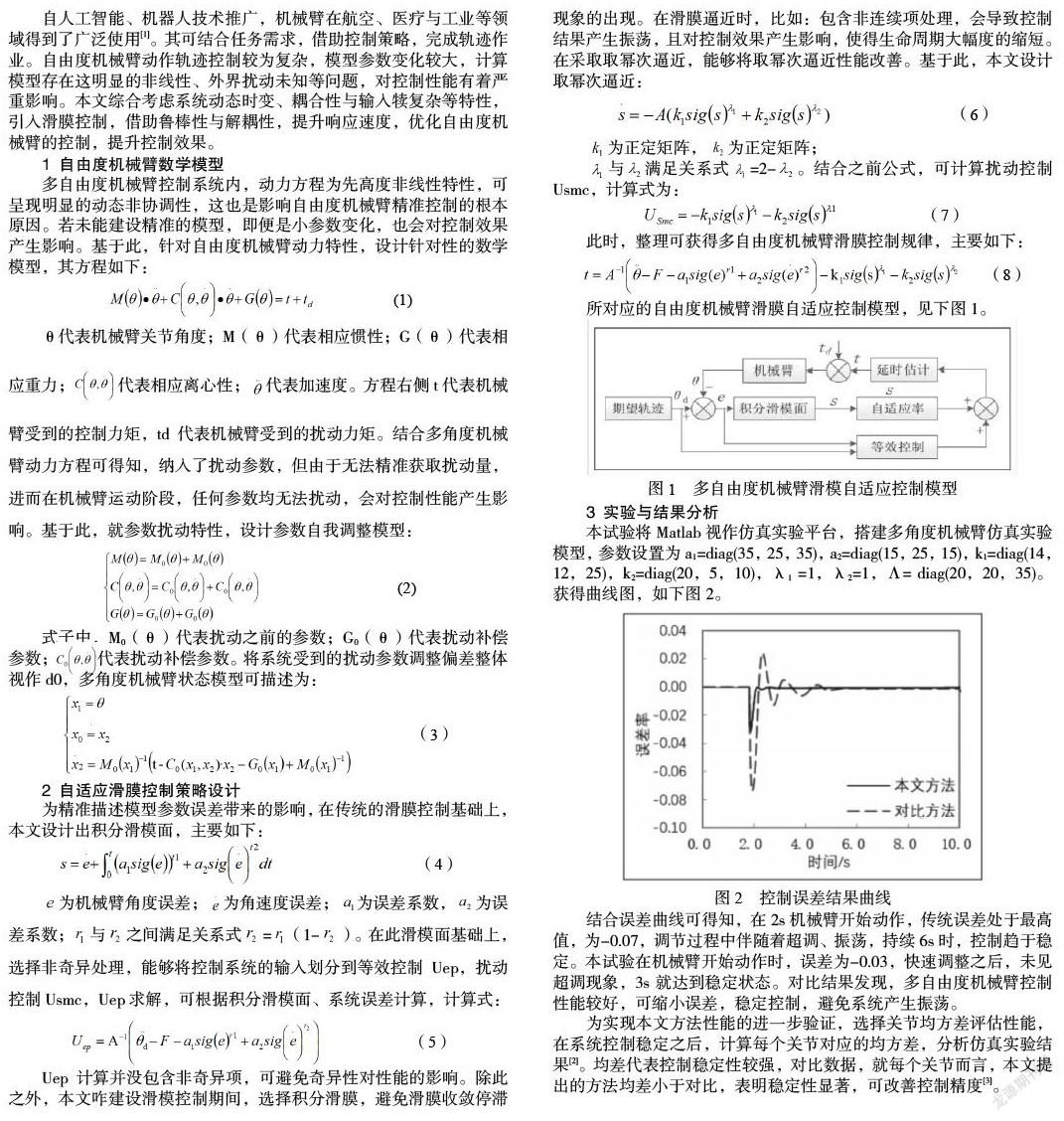
本試驗將Matlab視作仿真實驗平臺,搭建多角度機械臂仿真實驗模型,參數設置為a1=diag(35,25,35),a2=diag(15,25,15),k1=diag(14,12,25),k2=diag(20,5,10),λ1 =1,λ2=1,Λ= diag(20,20,35)。獲得曲線圖,如下圖2。
結合誤差曲線可得知,在2s機械臂開始動作,傳統誤差處于最高值,為-0.07,調節過程中伴隨著超調、振蕩,持續6s時,控制趨于穩定。本試驗在機械臂開始動作時,誤差為-0.03,快速調整之后,未見超調現象,3s就達到穩定狀態。對比結果發現,多自由度機械臂控制性能較好,可縮小誤差,穩定控制,避免系統產生振蕩。
為實現本文方法性能的進一步驗證,選擇關節均方差評估性能,在系統控制穩定之后,計算每個關節對應的均方差,分析仿真實驗結果[2]。均差代表控制穩定性較強,對比數據,就每個關節而言,本文提出的方法均差小于對比,表明穩定性顯著,可改善控制精度[3]。
本文提出的多自由度機械臂智能控制策略,可實現控制精度、控制穩定性的提升,能夠實現系統參數改善,減少系統振蕩發生率。究其原因,建設合理對數學模型,能夠對不確定擾動產生分析,避免對結果產生影響,結合擾動,建設自適應模型。設計、改進滑膜控制律,減少非奇異性、非連續性帶來的影響。
結束語
綜上所述,為實現自由度機械臂控制性能的提升,需要提出滑膜適應控制策略改進。通過建設自由度機械臂動力模型,分析誤差產生的原因,將擾動誤差引入氣質感呢。在數學模型基礎上,提出滑膜控制,并適當改進,設計出積分滑模面,避免出現非奇異性影響,雙冪次逼近設計,可避免非連續頂的影響,能夠確保自適應滑膜控制效率,以此提升適應能力與適應精度。
參考文獻:
[1]郭海全,劉燁,周秋坤.多自由度機械臂反演自適應滑模智能控制方法設計[J].智能計算機與應用,2020,10(12):16-17.
[2]張錦,靳煒,殷玉楓.基于智能感應的多自由度機械臂系統的設計探討[J].機械工程與自動化,2020(02):180-181+184.
[3]張念猛,程雅琳,張艷.多自由度機械臂的智能控制策略設計研究[J].電子測試,2019(22):49-50+88.
作者簡介:
趙郅滔(1999.6-)男,漢,四川綿陽,在讀學生,專科,單位:四川大學錦城學院,單位所在省市及郵編:四川省成都市,611731。
謝清全(2001.5-)男,漢,四川省巴中市,在讀學生,大專,單位:四川大學錦城學院,單位所在省市及郵編:四川省成都市,611731。
猜你喜歡
卷宗(2016年10期)2017-01-21 15:33:38
科技創新與應用(2016年34期)2016-12-23 16:04:06
科技創新與應用(2016年34期)2016-12-23 09:52:55
電子技術與軟件工程(2016年20期)2016-12-21 11:36:49
電子技術與軟件工程(2016年20期)2016-12-21 11:00:56
計算機教育(2016年10期)2016-12-19 12:15:52
演藝科技(2016年10期)2016-11-26 22:11:21
科學與財富(2016年28期)2016-10-14 04:41:37
科技視界(2016年4期)2016-02-22 19:51:01
