基于神經網絡模糊PID 的軌壓控制器設計
2021-01-05 06:06:08武警海警學院浙江寧波315801
機電設備 2020年6期
(武警海警學院,浙江寧波315801)
劉 宇
0 引言
很多因素會影響柴油機正常工作,但很難對這些因素進行有效控制。大量實驗證明,燃燒時的霧化程度、油氣混合質量、著火點時間和廢氣排放等都與燃油噴射系統有關。所以,通過對柴油機燃油噴射過程進行控制,達到改善柴油機性能的目的[1]。
目前,主要有2個有關高壓共軌電控噴射系統控制策略的研究方向:
1)采取柔性控制,即根據柴油機實際工況,結合MAP圖對噴油量、噴油正時和噴射控制的參數進行調整,使柴油機的噴油不受轉速、負載和外部環境的影響。但是參數調整過程復雜,難以明顯地提高柴油機電控噴射系統的性能。
2)通過增大軌壓,使柴油機油氣混合充分、著火延續期縮短和噪聲降低[2,3]等。雖說增大壓力可以迅速提高柴油機噴射系統性能,但受到高壓油管、噴油嘴等自身結構的限制,很難無限增大。
因此,只有把柔性控制和增大軌壓兩者相結合,才能使柴油機綜合性能真正邁上一個新臺階[4-8]。最終噴油量的實現,必須結合柴油機的實際工況選擇合理的控制策略,只有這樣才能達到柴油機工作的最優化。軌道壓力是柴油機實現噴油的前提條件,對柴油機的噴油起著至關重要的作用。因此,實現軌道壓力的控制是重點也是難點。
1 高壓共軌電控噴射系統控制策略的實現
1.1 軌道設定值的計算
1)環境修正量計算。首先,根據柴油機當前轉速和噴油量,查詢與此對應條件下的環境基本量基本值;其次,柴油機的外部因素,例如:冷卻水溫度、大氣溫度和大氣壓力,這些因素通過查詢對應曲線,分別會得到水溫修正系數、大氣溫度修正系數和大氣壓力修正系數。最后,這三個修正系數之和與環境修正量基本值之積就是環境修正量。
2)燃油溫度修正量計算燃油溫度修正量計算方法基本上和環境修正量的方法一致:首先,通過查詢柴油機軌道壓力MAP圖,可以知道燃油的基本修正值;然后,通過查詢軌道壓力—燃油溫度MAP圖,也可以知道燃油溫度的修正系數;最后利用這個燃油溫度修正系數和燃油基本修正值相乘,得到的積就是燃油溫度修正量。
1.2 基本的控制策略
柴油機的軌道壓力控制如圖1所示。
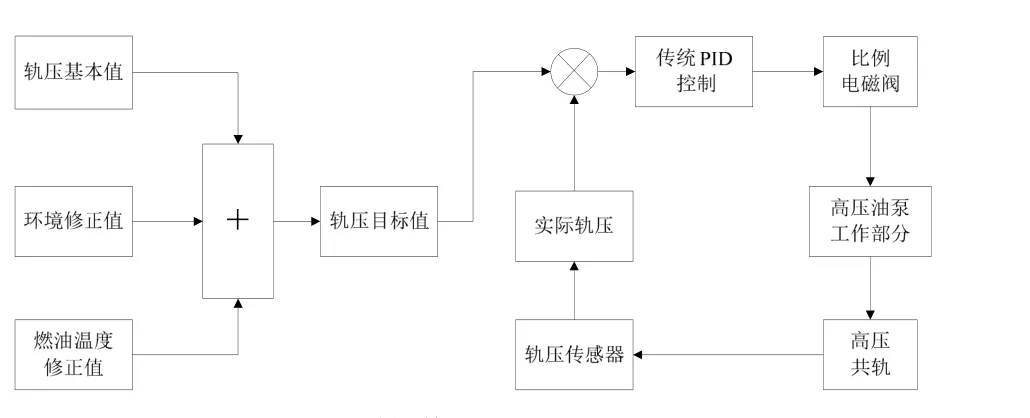
圖1 軌道壓力控制圖
根據上一小節對環境修正值和燃油溫度修正值的計算結果,把軌道壓力基本值、環境修正值和燃油溫度修正值進行相加,得到的值就是軌道壓力目標值。由于柴油機工作時軌道壓力一直在發生變化,所以需要對軌壓目標值進行限定,不能高于最高軌壓,也不能低于最低軌壓。
1)起動時油壓控制
起動時,需要根據實際情況選擇恰當的控制方式:剛起動時,由于轉速比較低,只能檢測到曲軸轉速信號,而判缸信號無法立即檢測到,此時運用開環控制,建立控制時序,可以快速起動油壓;當油壓接近目標值時,采用閉環控制對油壓進行反饋調節,使柴油機工作更加平穩。
2)起動后油壓控制
(1)正常工況:正常工作時,方法同基本的控制策略。
(2)緊急工況:在急加速或急減速情況下,采用開環和閉環相結合的控制方法進行控制。首先需要設定一個差值界限,當偏差值小于界限時,采用開環直接啟動;當偏差值大于界限時,需要反饋并做繼續調整。
這里采用了傳統PID閉環控制算法對軌壓實現控制,但是當柴油機發生工況改變時,會產生壓力波動,而傳統PID控制算法無法對壓力進行精準控制。
2 基于神經網絡模糊PID軌壓控制器設計
2.1 軌道設定值的計算
軌壓控制的目的在于解決共軌壓力的穩定性以及工況之間過渡的良好銜接性。但在軌壓控制過程中,會受到很多因素影響,如:
1)高壓燃油在高壓共軌內快速流動會與管壁碰撞發生反彈,導致壓力波動;
2)油泵的工作周期性會導致軌壓波動;
3)系統自身的結構會導致壓力波動,例如:高壓油管的長度和直徑、高壓油泵的供油油路的長度、高壓油路的彎曲等。
壓力波動對控制軌壓的穩定性能造成嚴重的影響,所以在軌壓控制的過程中,需要采取相應的措施來調節壓力波動引起的參數變化。
2.2 神經網絡模糊PID軌壓控制器設計
由于傳統PID控制算法只能使柴油機在某種工況下達到最優,而工況之間過渡時,傳統PID控制算法明顯無法滿足。因此,為了解決這一問題,又在此基礎上提出了神經網絡控制算法和模糊控制算法,但發現都不足以對軌壓實現精準的控制。為此,作者結合了模糊控制和神經網絡控制,并在此基礎上,取長補短,設計出神經網絡模糊控PID控制器。
2.2.1神經網絡模糊PID軌壓控制器設計
模糊控制是基于模糊集理論[9]和專家系統的成果而誕生的,把具體的信息經過模糊化處理,使它具有這個信息特點的一個范圍性描述。并不需要像其它控制那樣,對控制對象進行準確定量的數學建模實現控制,而是只需要通過從規則庫里面進行推理,得到相關的內容,從而對控制對象進行控制。
模糊控制是以模糊語言變量、模糊集合論及模糊邏輯推理為主的一種計算機控制。它由于不需要準確定量的數學建模和運用人們的工作經驗進行處理,相對而言缺乏一定的系統性和準確性。模糊控制系統由模糊控制器和控制對象組成,如圖2所示。
2.2.2神經網絡控制
1)神經網絡
神經網絡全名是“人工神經網絡”,顧名思義,是人們模仿大腦神經系統建立的模型。因而和人腦一樣,它的重要組成結構是人工神經元,神經元是神經網絡操作的基本信息處理單位[10]。具體結構如圖3所示。
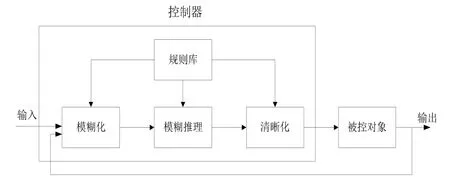
圖2 模糊控制器結構圖
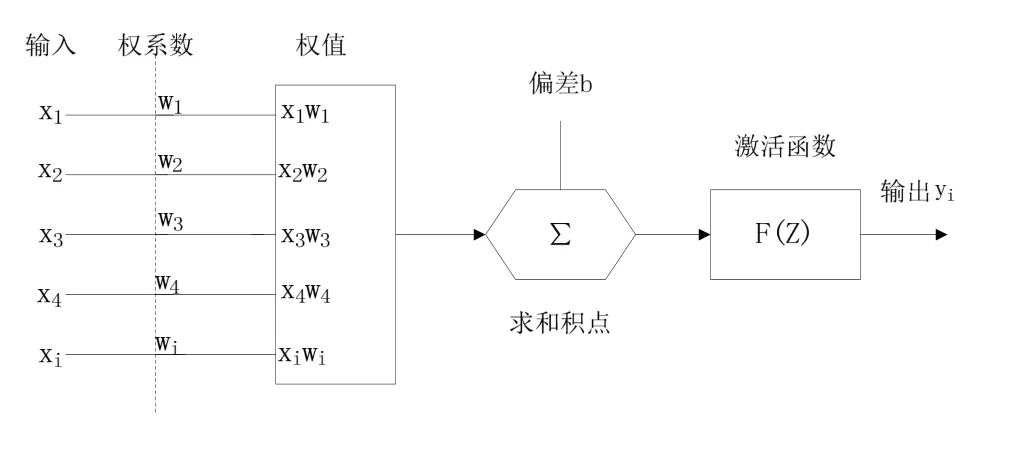
圖3 人工神經元的結構示意圖
其中,x1是輸入信號,y1是輸出信號;從圖中可以清楚的看出有多個輸入信號,但只有一個輸出信號。輸入信號x1和權系數w1之積是權值,權值與神經元的偏差之和作為激活函數f(z)的輸入值,y1是輸出值。
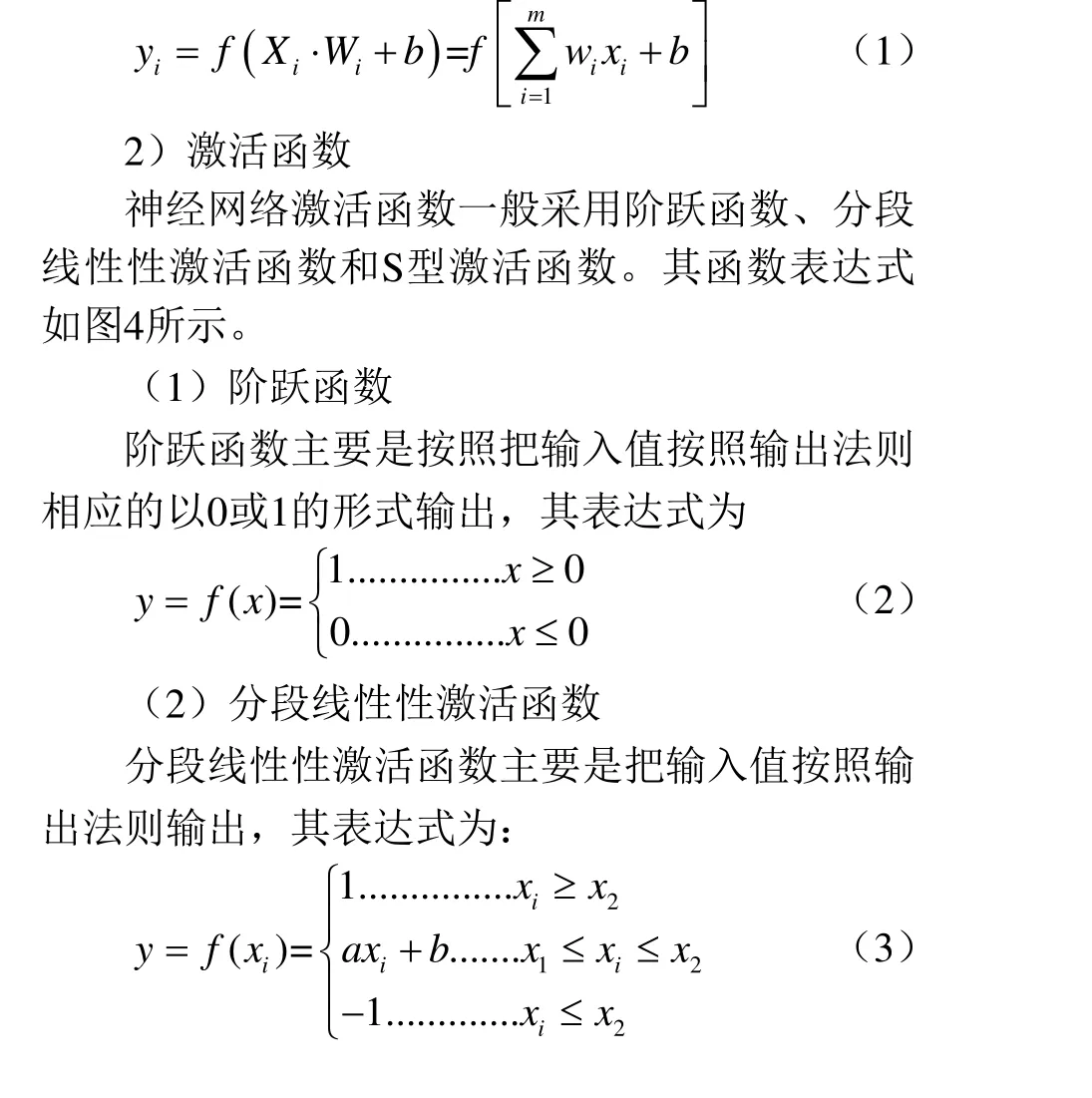
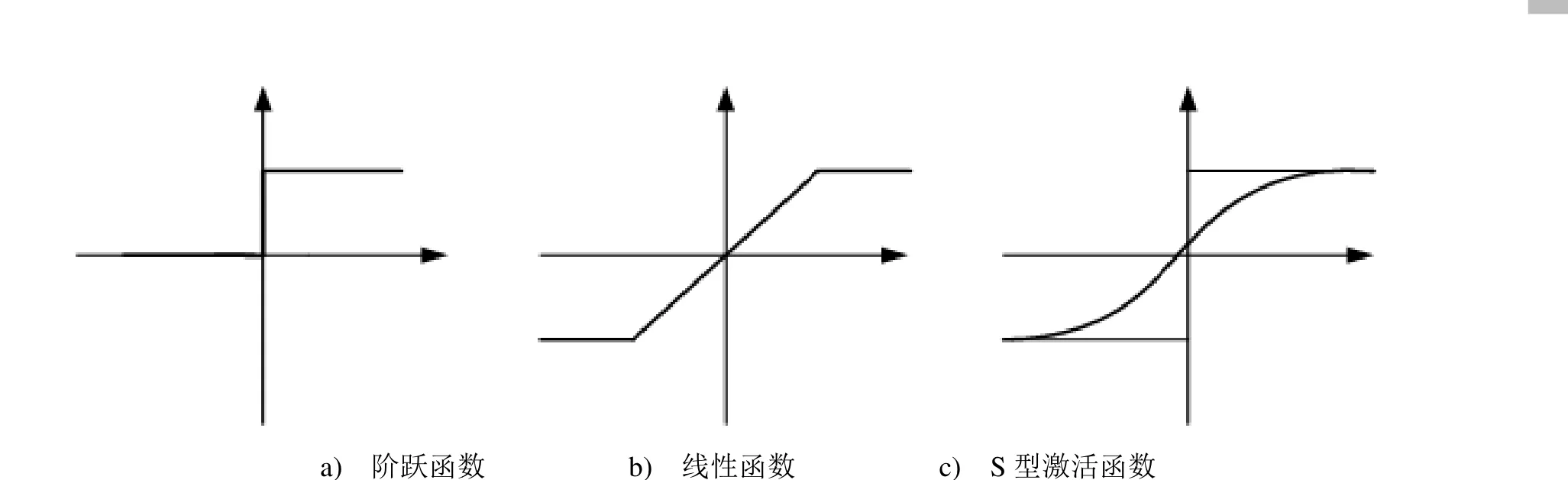
圖4 激活函數示意圖
(3)S型激活函數
S型激活函數主要將將輸入值變化到(0,1)的范圍內,它可以處理大的輸入信號值,也可以處理小的信號輸入值。其表達式為:

3)神經網絡控制系統特點
(1)非線性:現如今大部分問題都屬于非線性類,而神經網絡系統卻具備了線性和非線性這兩種特點;
(2)容錯性:當系統局部受到損害時,系統本身具有恢復信息的功能;
(3)并行性:通過神經元結構示意圖可知,系統可以同時有多個輸入信號且可以并行處理,得到一個輸出信號;
(4)時效性:因為具有并行性,因此響應速度快,滿足時效性要求;
(5)魯棒性:當系統受到外界干擾時,由于系統本身是按相似的輸出模式進行輸出,因此仍然可以在訓練結束的基礎上進行輸出。
2.2.3神經網絡模糊PID控制器
通過模糊控制和神經網絡控制基本理論的學習,可以知道模糊控制可以處理PID所不具備的動態性能和靜態性能的能力,神經網絡控制可以處理大量數據的能力。因而,在傳統PID的基礎上,引入模糊控制和神經網絡控制,從而設計出圖5所示的神經網絡模糊PID控制器,以更好地實現對軌壓的精準控制。
在PID控制算法中介紹PID是通過比例、積分和微分實現控制的,但是這三個參數KP、Ti和Td不是毫無關系的,恰恰相反,他們是緊密聯系在一起,相互聯系、相互制約的關系。
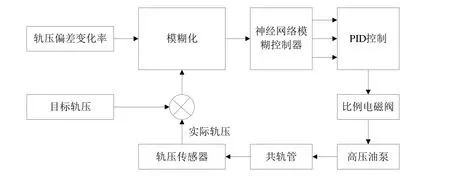
圖5 神經網絡模糊控制器系統結構圖
首先,把軌壓目標值和實際軌壓值之間的偏差及偏差值變化率輸入到模糊化板塊內,對這兩個變量進行模糊化處理,得到比例、積分和微分三個參數的值。其次,把這三個參數值作為神經網絡控制的輸入端,在神經網絡控制器中對這些值進行調試訓練,得到最佳的一組數值。最后,把這得出的三個數值輸入到PID控制器中,由PID控制器控制比例電磁閥實現對高壓油泵的控制。本文采用了閉環控制,把實際壓力反饋到輸入端與目標值進行對比,可以使得柴油機工作更加穩定。由此看來,所設計的神經網絡模糊PID閉環控制可以具有以下的優點:
1)結構簡單、操作方便,還具有較強的魯棒性。
2)處理復雜的問題時,不需要精準的定量建模,節約了成本。
3)有多個輸入端,可以處理大量的數據,得到最優的值。
4)工作穩定,具有自我學習和自我調節的功能。
3 結論
在柴油機高壓共軌電控噴射系統研究方面,控制策略一直是研究的重點和難點。傳統PID控制算法憑借結構簡單、容易實現的特點,被廣泛應用于柴油機電控系統。但是傳統PID控制算法還存在對控制對象參數變化比較敏感的缺陷,所以需要對軌壓的控制方法繼續研究。本文提出的神經網絡模糊PID控制算法,結合了模糊控制、神經網絡控制和傳統PID控制三者的優點,很大程度上改善了對軌壓控制的精準性和可控性。隨著對高壓共軌電控噴射系統控制策略研究的繼續深入,硬件設施不斷提高,相信在以后更精準、更智能的控制算法也會出現。
