核電廠氣泵控制器可靠性優化方案
2021-01-05 07:06:00朱桂霞李迪亮周田蜜錢玉剛
設備管理與維修 2020年19期
藍 劍,朱桂霞,李迪亮,周田蜜,錢玉剛
(中核武漢核電運行技術股份有限公司,湖北武漢 430070)
0 引言
在電子電路產品中,電子元器件本身的可靠性往往與產品的可靠性息息相關;尤其是對于電路中的高風險電子器件需要高度關注。通常要根據實際工況對設計方案進行優化以降低風險。
1 氣泵控制器應用背景
氣泵控制器廣泛應用于核電廠中的氚碳取樣器中,其目的是驅動氚碳取樣器中的氣泵,從而為氚碳取樣器提供工作所需要的氣流。
常用的氣泵通常由頻率為50 Hz、有效值為220 V 的市電所驅動。然而,由于市電的頻率和幅值無法調節,導致氣泵氣流量無法調節。因此,如要滿足可調節氣流量的需求,需要有針對性的設計控制器。由于控制器中存在功率電路,功率器件的工作可靠性即是設計的難點又是關鍵點,對于控制器的可靠性至關重要。因此,將對應用于氣泵控制器中的功率器件可靠性進行深入分析。
2 氣泵控制器基本原理
應用于系統中的氣泵控制器主功率部分采用推挽電路[1](圖1)。推挽電路輸入為直流24 V 電壓,取自系統自帶電源;推挽電路輸出為幅值240 V 的交流方波,方波直接驅動氣泵產生氣流。
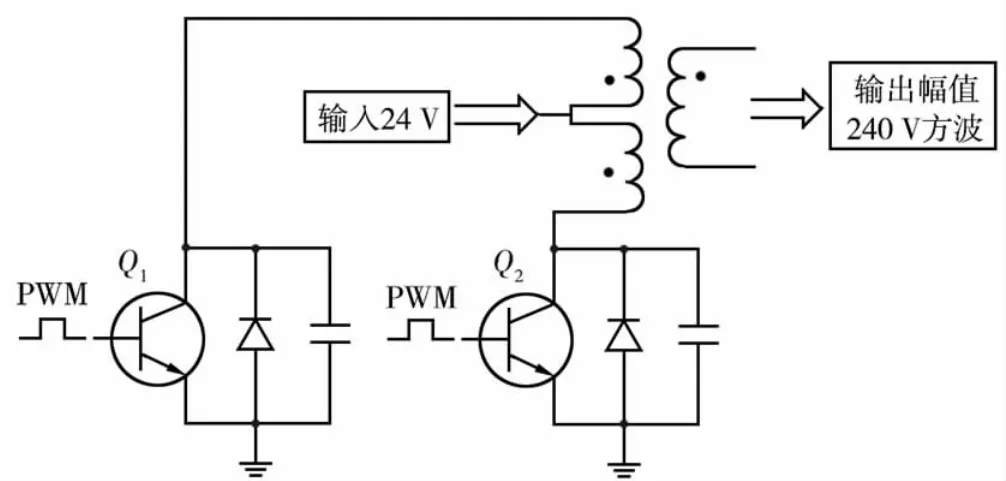
圖1 推挽拓撲電路
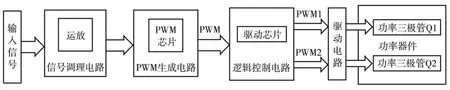
圖2 控制電路方案
氣泵控制器的控制電路如圖2 所示[2],輸入信號由外部控制器給出。控制電路的功能一方面是控制功率回路正常工作,驅動氣泵輸出氣流;另一方面,控制電路可根據輸入信號的要求,控制功率回路輸出指定量的氣流。
控制電路主要由信號調理電路、PWM(Pulse Width Modulation,脈沖寬度調制)生成電路、邏輯控制電路、驅動電路、功率器件等部分組成。信號調理電路主要由運放構成,負責對輸入信號進行濾波、放大,以匹配后級電路應用需求;PWM 生成電路主要由PWM 芯片構成,其作用是用來產生PWM 驅動波形;邏輯控制電路主要是用來產生兩路互斥的PWM 分別作為推挽拓撲中兩個開關管的驅動信號;驅動電路作用是將信號級的PWM信號進行功率放大,以便驅動功率三極管。
輸入信號經過信號調理電路處理之后送至PWM 芯片,PWM 芯片根據輸入信號幅值的大小控制輸出PWM 的占空比,從而控制推挽電路輸出交流方波電壓的脈寬,最終控制氣泵輸出的氣流量大小。
3 三極管基本工作原理
在氣泵控制器電路系統中,功率三極管主要工作在開關狀態以實現功率電路的換流功能;同時為了減小三極管本身的發熱以提高三極管工作的可靠性,三極管上消耗的功率宜越小越好。
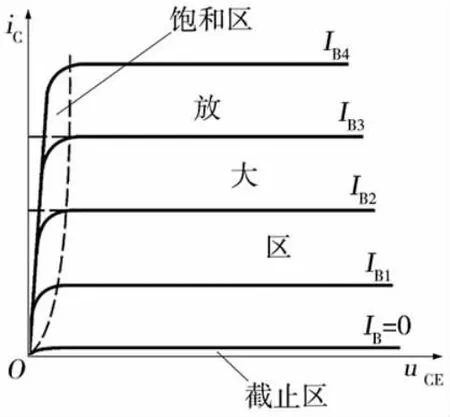
圖3 三極管輸出特性曲線
圖3 為三極管通用輸出特性曲線圖[3],其中IB表示三極管基極電流,IC表示三極管集電極電流,uCE表示三極管導通壓降,圖中曲線描述在不同基極電流IB的作用下,三極管輸出特性。
由圖3 可知三極管工作狀態分為三種:飽和區、截止區、放大區。
當三極管工作在飽和區時,三極管導通壓降uCE與集電極電流IC近似于線性關系。此時,三極管導通壓降很低,因此三極管導通損耗也較小。
當三極管工作在放大區時,三極管集電極電流IC與基極電流IB成正比,同時由于uCE急劇增大,此時三極管導通損耗極大。
當三極管工作在截止區時,三極管此時處于關斷狀態,僅有極小的漏電流。
基于上述分析,可以知道用作開關功能的三極管理想工作狀態是在截止區和飽和區之間進行切換工作。當三極管關斷時,宜工作在截止區;當三極管導通時,宜工作在飽和區。
4 氣泵控制器設計隱患
在對氣泵控制器測試過程中,發現氣泵控制器輸出電壓在帶載工況下出現了畸變。圖4 為氣泵控制器空載時輸出電壓,圖5 為氣泵控制器帶載時輸出電壓。可以明顯看到帶載時,輸出電壓出現塌陷。
圖4 控制器空載輸出電壓
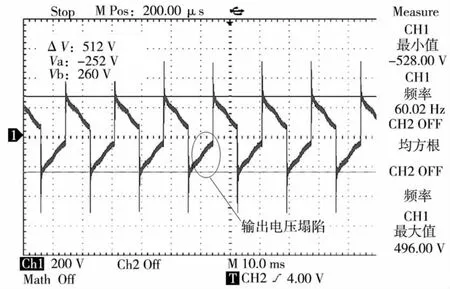
圖5 控制器帶載輸出電壓
由于氣泵控制器輸出電壓通過變壓器副邊輸出,且副邊輸出電壓與原邊輸入電壓成比例[4]。因此,進一步對變壓器原邊波形進行測試,測試對比原邊三極管集射極電壓uCE與輸出電壓,如圖6 所示。
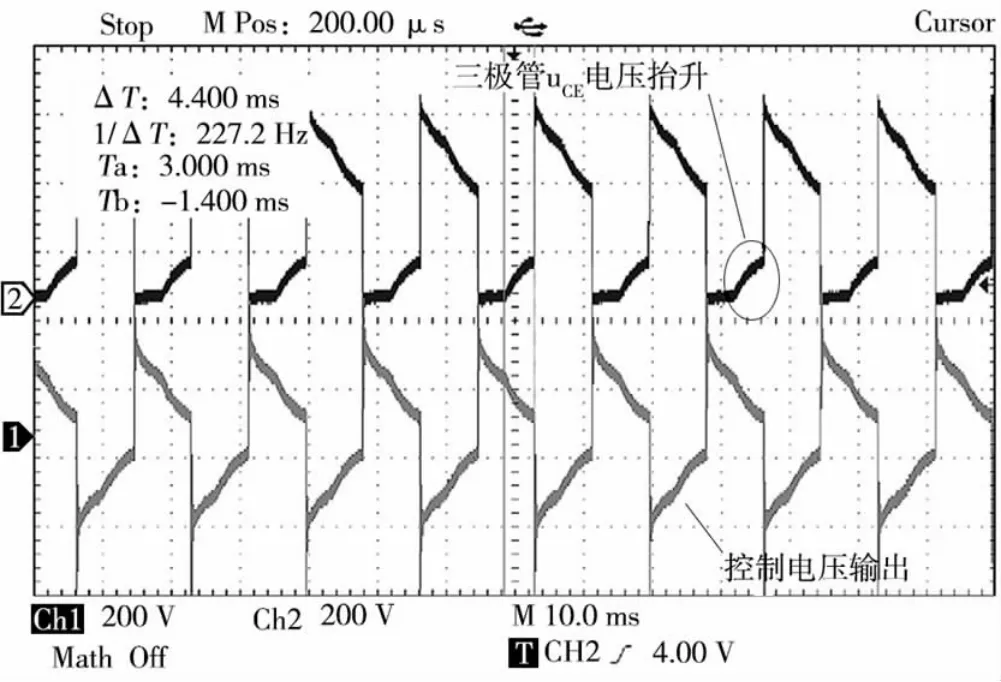
圖6 三極管集射極電壓與輸出電壓
從圖6 中可以很明顯看到在輸出電壓塌陷的同時,三極管集射極電壓uCE出現抬升。因為三極管集射極電壓與變壓器輸出電壓成反比,因此可以初步斷定氣泵控制器輸出電壓垮塌的原因是三極管集射極電壓升高對變壓器輸出電壓產生了分壓,從而造成輸出電壓垮塌。
根據第3 節分析,三極管的工作區間有三種:截止區、飽和區、放大區。當三極管導通,三極管工作在放大區時集射極電壓上升明顯。因此可以判斷三極管在導通時進入到了放大區,導致三極管導通壓降uCE上升明顯。
三極管作為功率開關器件,其功耗是需要重點關注的風險點,功耗越大三極管溫升越高,并最終影響三極管壽命。
當三極管導通壓降升高時,造成的最直接影響就是三極管導通損耗顯著增加。因此,對于功率三極管,通常希望它在導通時工作在飽和區域,以便降低導通損耗。
5 氣泵控制器改進方案及效果
根據上文,氣泵控制器在帶載情況下,三極管導通時的工作狀態由飽和區進入到放大區,而空載時無此情況。結合第3 節分析三級管工作的原理可以判斷,三極管進入放大區的原因是因為在帶載情況下,負載電流變大導致三極管集電極電流IC增大,從而使三極管工作狀態越過飽和區進入放大區。因此,可以通過提高三極管基極電流IB來提升三極管由飽和區過渡到放大區的集電極電流IC的閾值。
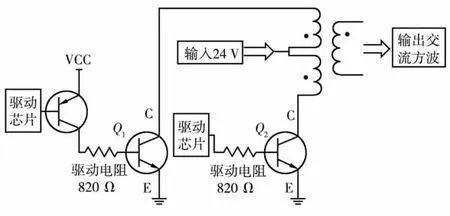
圖7 三極管驅動電路
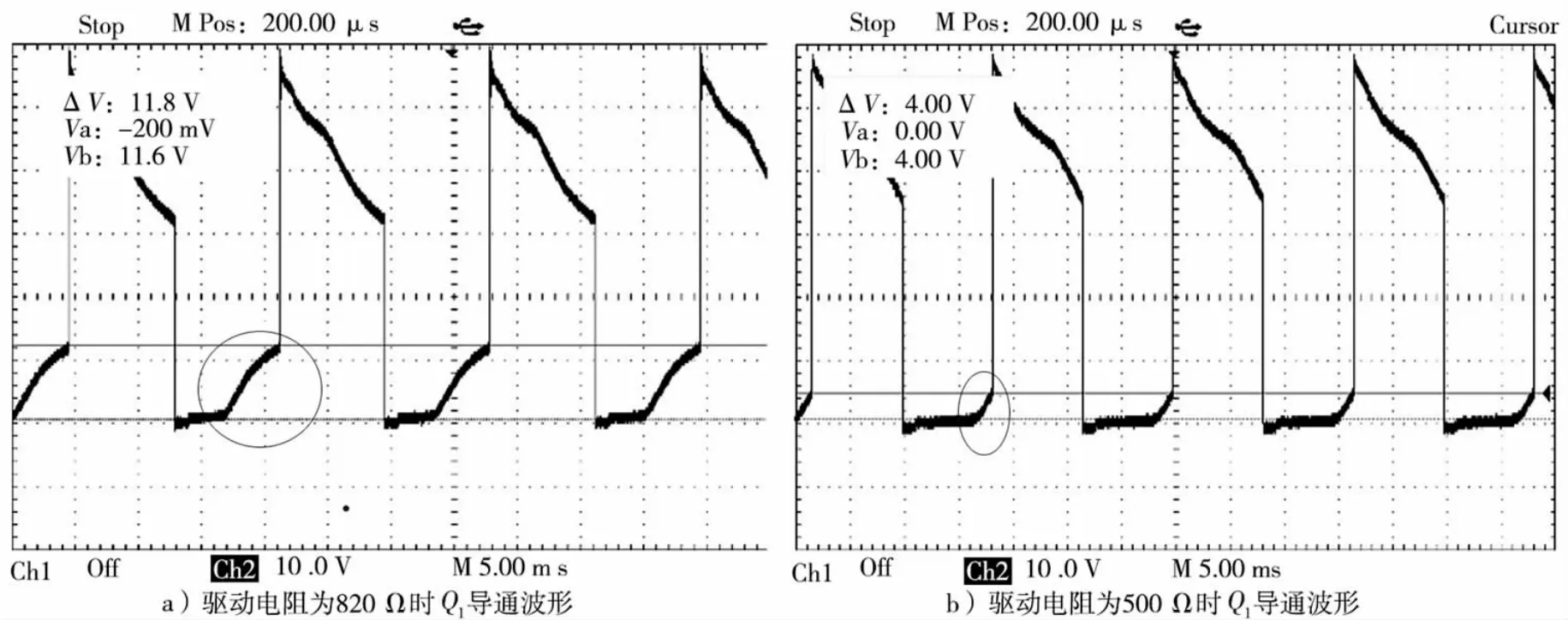
圖8 三極管Q1 導通波形對比
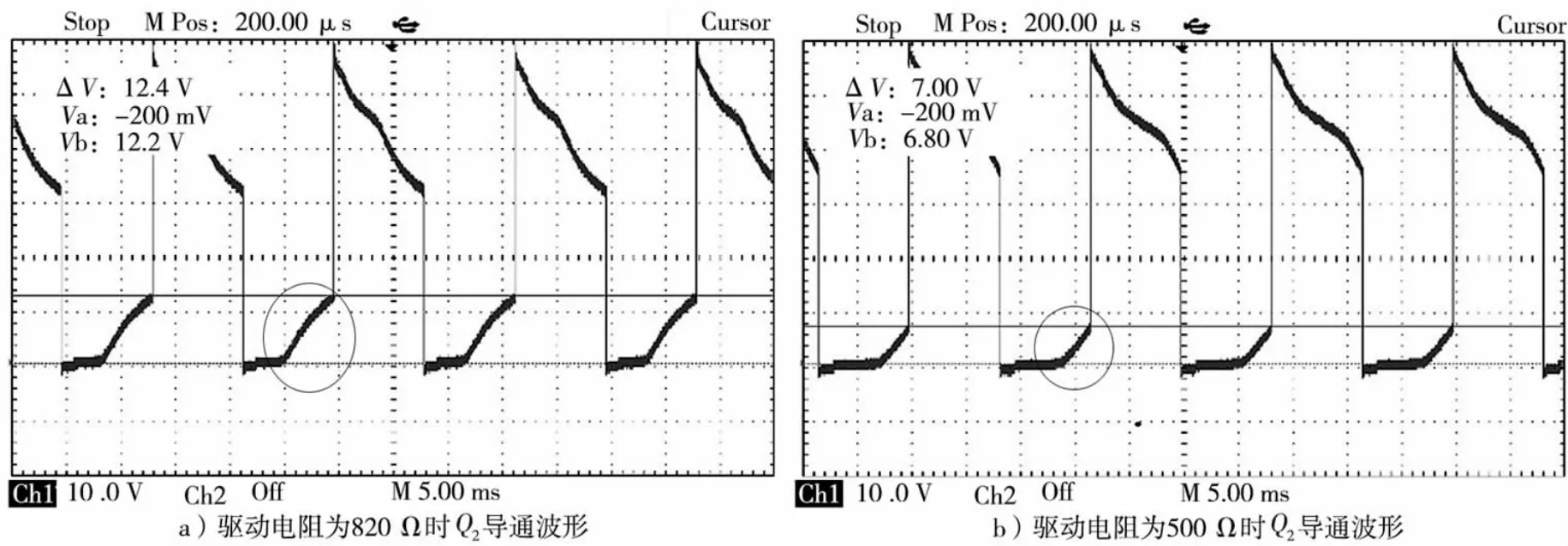
圖9 三極管Q2 導通波形對比
圖7 為氣泵控制器三極管驅動電路,其中Q1采用三極管驅動,Q2為驅動芯片直驅。原設計中三極管柵極驅動電阻均為820 Ω,驅動電壓為5 V。
為減小柵極電流IB,現將驅動電阻減小至500 Ω。對三極管帶載導通壓降進行測試,并與原設計導通壓降進行對比,測試波形如圖8 和圖9 所示,從圖中可以很明顯看到三極管導通電壓出現下降。
對圖8 和圖9 中幅值進行測試,記錄數據如表1 所示。根據表1 的測量數據,可以看到當減小柵極電阻時,三極管導通壓降uCE下降顯著。

表1 三極管導通電壓幅值對比
根據測量數據的下降趨勢,進一步對驅動電阻進行減小以增大基極電流IB來獲取更低的導通壓降。但是經過測試,發現三極管電壓導通幅值下降不明顯。通過分析,可以判斷由于驅動芯片的驅動能力有限,無法進一步增大IB,因此,進一步的優化方案需要對驅動電路原理圖進行修改。結合深入優化三極管驅動電路所需要耗費的時間成本、經濟成等,本次可靠性改進僅對驅動電阻進行改進,暫不對電路原理進行改進。
6 結語
當產品中包含功率電路時,功率電路本身輸入輸出功率較大,同時,其承受的損耗功率往往也較大,導致功率器件通常是電路中的薄弱環節,因此需要重點關注功率器件的工作狀態,盡可能降低其風險,從而提升產品的整體可靠性。
