板球系統(tǒng)平臺設(shè)計方案研究
2021-01-05 00:35:30陳芷琳溫曉靜丁肇紅
應(yīng)用技術(shù)學(xué)報 2020年4期
陳芷琳,溫曉靜,劉 鑫,王 翔,丁肇紅
(上海應(yīng)用技術(shù)大學(xué) 電氣與電子工程學(xué)院,上海 201418)
自從20世紀(jì)80年代末板球系統(tǒng)開始被國內(nèi)外學(xué)者當(dāng)作研究對象來驗(yàn)證各種控制算法,板球系統(tǒng)的研究已經(jīng)經(jīng)歷了從simulink模型仿真驗(yàn)證到實(shí)物平臺實(shí)時控制的過渡[1-2],陸續(xù)有各個課題組實(shí)驗(yàn)室以及企業(yè)生產(chǎn)制造出各類板球系統(tǒng)實(shí)物平臺,其中國內(nèi)比較常用的是由固高科技公司生產(chǎn)的GPB2001板球系統(tǒng),其平臺實(shí)物和上位機(jī)界面如圖1所示。
隨著自動控制技術(shù)的進(jìn)步和深入研究板球系統(tǒng)現(xiàn)在已經(jīng)成為各高校自動控制原理實(shí)驗(yàn)室的基礎(chǔ)實(shí)驗(yàn)平臺,目前市場所售板球系統(tǒng)未進(jìn)行技術(shù)升級換代,上位機(jī)軟件還只能運(yùn)行在windows xp系統(tǒng)環(huán)境下,技術(shù)相對來說已經(jīng)落后,不能滿足當(dāng)前教學(xué)和研究所需。而且板球系統(tǒng)平臺自身即是一個集合機(jī)械、電子、自動化以及計算機(jī)科學(xué)等多學(xué)科交叉綜合的系統(tǒng),因此對研究板球系統(tǒng)平臺設(shè)計研究有非常實(shí)用的價值和重要意義。本文就板球系統(tǒng)提出了一套完整的設(shè)計思路和可執(zhí)行方案,實(shí)現(xiàn)成本較低,而且采用技術(shù)手段均為當(dāng)前最新技術(shù),有較高的推廣價值。
1 總體設(shè)計方案
本研究設(shè)計的板球系統(tǒng)平臺主要有機(jī)械部分、硬件部分(包括硬件和嵌入式軟件)和上位機(jī)三大部分組成[3-4]。板球本體利用鋁合金搭建主體機(jī)械結(jié)構(gòu),采用2個0°~180°伺服舵機(jī)為動力機(jī)構(gòu),電阻屏作為小球位置傳感器,以STM32F103單片機(jī)為控制核心,通過串口與上位機(jī)進(jìn)行連接通訊,上位機(jī)設(shè)計采用python為編程語言,PyQt5為GUI框架進(jìn)行搭建。下面對各個部分詳細(xì)展開闡述。
2 機(jī)械結(jié)構(gòu)設(shè)計
主體機(jī)械結(jié)構(gòu)采用鋁合金為主要材質(zhì),CNC加工切割成設(shè)計好的形狀,舵機(jī)臂與平板之間通過鉸鏈結(jié)構(gòu)相連,為了保證平板在2個舵機(jī)推動運(yùn)動過程中維持圍繞中心運(yùn)動的狀態(tài),采用萬向節(jié)將平板的幾何中心與底座固定部分相連。同時底座固定部分設(shè)計了4個彈簧減震來減少在運(yùn)動過程中振動對系統(tǒng)造成的干擾。本設(shè)計中舵機(jī)采用的是Futaba3010模擬舵機(jī),非常關(guān)鍵的是,舵機(jī)的選擇非常重要,其性能的好壞直接影響整體系統(tǒng)的使用體驗(yàn),本研究方案所選用的舵機(jī)參數(shù)如表1。
在上述關(guān)鍵參數(shù)中,舵機(jī)的扭矩要與電阻屏質(zhì)量小球質(zhì)量等整體系統(tǒng)相匹配,以保證有足夠的動力輸出,舵機(jī)的響應(yīng)速度應(yīng)盡可能的快,一般情況下舵機(jī)的響應(yīng)也與供電電壓所相關(guān),需要機(jī)械和電子共同協(xié)調(diào)。
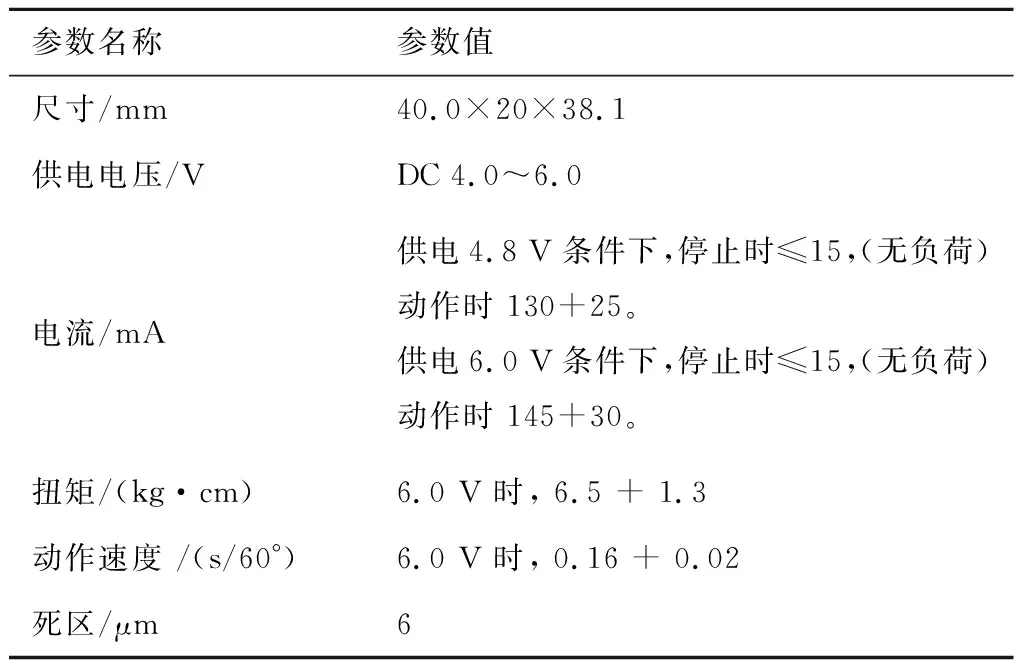
表1 Futaba3010舵機(jī)參數(shù)Tab.1 The parameters of Futaba3010 servo
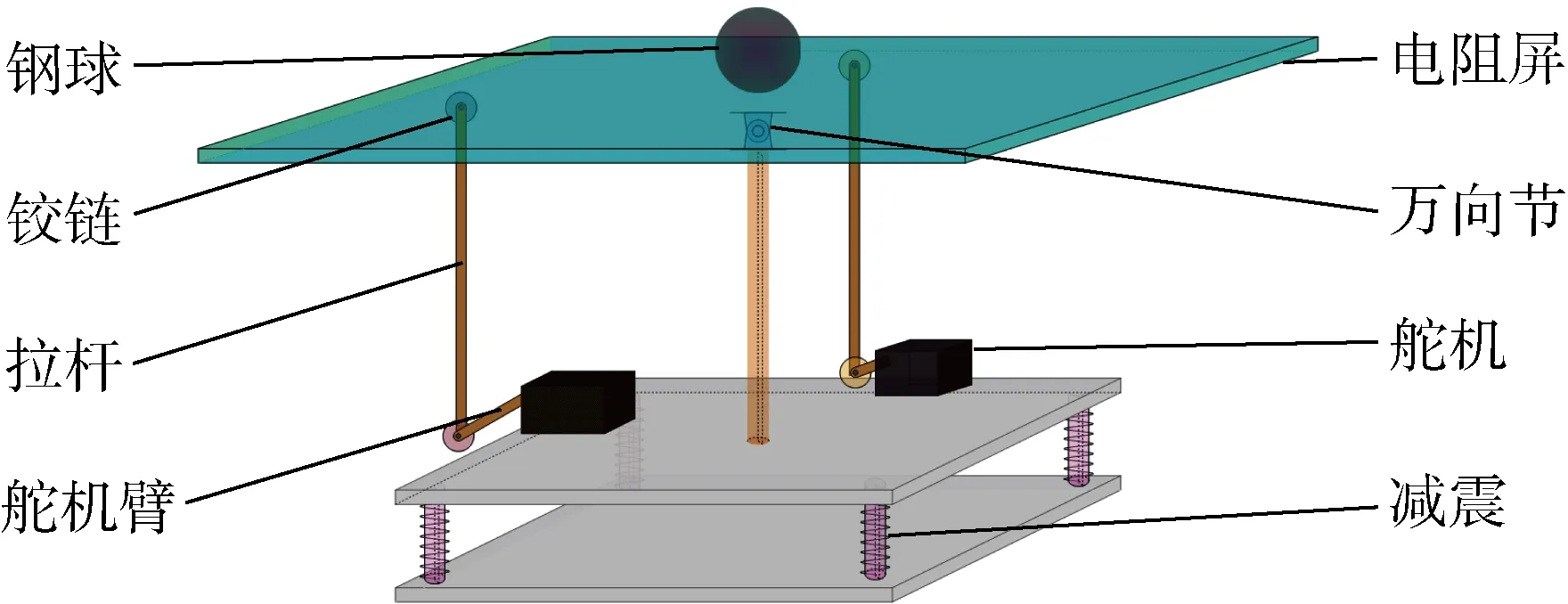
圖2 板球系統(tǒng)機(jī)械結(jié)構(gòu)圖Fig.2 Mechanical structure of Ball&Plate system
由于舵機(jī)本身已經(jīng)構(gòu)成一個閉環(huán)系統(tǒng),省去了傳統(tǒng)伺服電機(jī)需額外加裝編碼器等工作,因此本方案中執(zhí)行機(jī)構(gòu)選用舵機(jī)極大地降低了系統(tǒng)的復(fù)雜度同時也降低了系統(tǒng)的成本。
3 硬件設(shè)計
3.1 電路設(shè)計
本研究所設(shè)計的電路系統(tǒng)主要有單片機(jī)控制電路、電源電路、觸摸板電路、OLED顯示屏電路、按鍵電路,串口電路等,整體框架如圖3所示。
3.1.1 電源電路
電源電路為整個系統(tǒng)提供穩(wěn)定可靠的電能,是整個系統(tǒng)最基本的組成部分[5],系統(tǒng)設(shè)計外接供電為直流12 V供電。舵機(jī)是系統(tǒng)中的大功率用電設(shè)備,結(jié)合舵機(jī)參數(shù)本文采用的是5 V舵機(jī)供電。單片機(jī)觸摸板顯示屏等其余用外設(shè)模塊供電電壓均為3.3 V。由于2種電壓的存在,為了兼顧效率和性能,采用開關(guān)穩(wěn)壓和線性穩(wěn)壓相結(jié)合的方案。12 V轉(zhuǎn)5 V通過開關(guān)DC-DC的方案實(shí)現(xiàn),由于3.3 V采用的是線性穩(wěn)壓,為了減小其功耗降低線性DC-DC的壓差[6],3.3 V輸入由開關(guān)穩(wěn)壓所產(chǎn)生的5 V提供,電源部分電路圖見圖4。
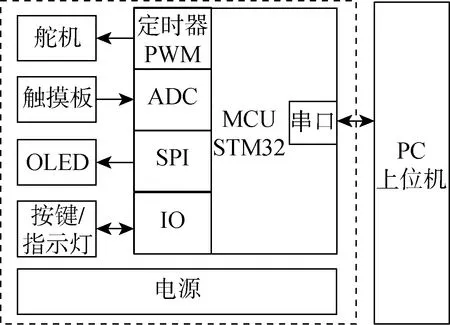
圖3 板球系統(tǒng)硬件框架圖Fig.3 Hardware framework of Ball&Plate system

圖4 電源電路Fig.4 Power circuit
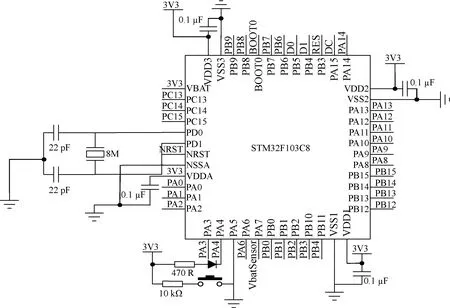
圖5 單片機(jī)主控電路Fig.5 MCU control circuit
3.1.2 主控電路
如圖5單片機(jī)引腳圖所示,主控電路選擇的芯片是STM32F103單片機(jī),該款單片機(jī)采用ARM的Cortex-M3內(nèi)核架構(gòu),兼?zhèn)涓咝阅堋⒌统杀尽⒌凸摹⒋鎯λ俣瓤斓葍?yōu)勢[7]。結(jié)合本研究方案需求,該款單片機(jī)所具備的外設(shè)端口以及運(yùn)行速度等均可達(dá)到要求,而且作為一款在民用領(lǐng)域有著廣泛地應(yīng)用的單片機(jī),供貨穩(wěn)定,成本較低。
主控電路定義了單片機(jī)各個引腳的功能和設(shè)計制作了與單片機(jī)引腳相連的電路,包括了與單片機(jī)引腳直接相連的復(fù)位電路、時鐘電路、電源電路、下載電路等;外圍電路還包括了OLED顯示屏電路、電阻屏驅(qū)動電路、串口通信電路等[8]。
3.1.3 電阻屏電路
電阻屏作為本研究設(shè)計方案中的小球位置傳感器是整個系統(tǒng)中較為關(guān)鍵的部分,設(shè)計采用的是一個 0.304 8 m(12 in)的電阻觸摸屏,其電路圖如圖6所示,驅(qū)動電路采用2對PNP-NPN三極管來分時控制其通斷狀態(tài)利用單片機(jī)的ADC功能來讀取觸點(diǎn)的位置。
3.1.4 串口電路
串口電路如圖7所示,單片機(jī)串口與上位機(jī)USB之間的通信轉(zhuǎn)換由此電路來完成,同時該電路具備給單片機(jī)一鍵下載程序的功能,為系統(tǒng)后續(xù)通過上位機(jī)升級程序提供了可能。

圖6 電阻屏電路Fig.6 Resistance screen circuit

圖7 串口轉(zhuǎn)USB電路Fig.7 Serial to USB circuit
3.1.5 顯示屏電路
考慮到人機(jī)交互的便捷性,設(shè)計方案在硬件設(shè)計中加入了顯示屏按鍵等人機(jī)交互方式,下位機(jī)采用的是一塊2.88 cm的OLED屏幕,可以顯示基本運(yùn)行狀態(tài)和參數(shù)等。該顯示屏支持多種協(xié)議,本次采用的I2C通信協(xié)議完成單片機(jī)對顯示屏的控制,其電路圖如圖8所示。
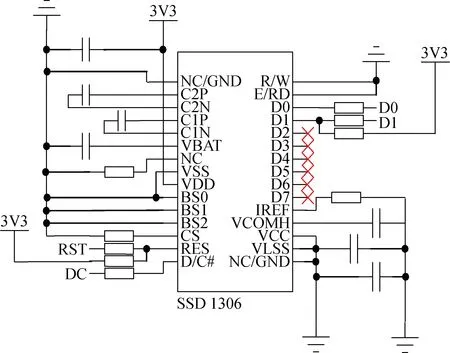
圖8 OLED顯示屏電路Fig.8 OLED driver circuit
3.2 嵌入式軟件設(shè)計
板球系統(tǒng)的功能較為復(fù)雜,從運(yùn)行模式上區(qū)分,分為離線模式和在線模式,離線模式即下位機(jī)自己根據(jù)內(nèi)置算法進(jìn)行控制[8-9],在線模式為與上位機(jī)連接,控制指令來自上位機(jī),下位機(jī)負(fù)責(zé)執(zhí)行。此外還有一些輔助模式,比如儀器校準(zhǔn)模式。程序設(shè)計流程圖如圖9所示。
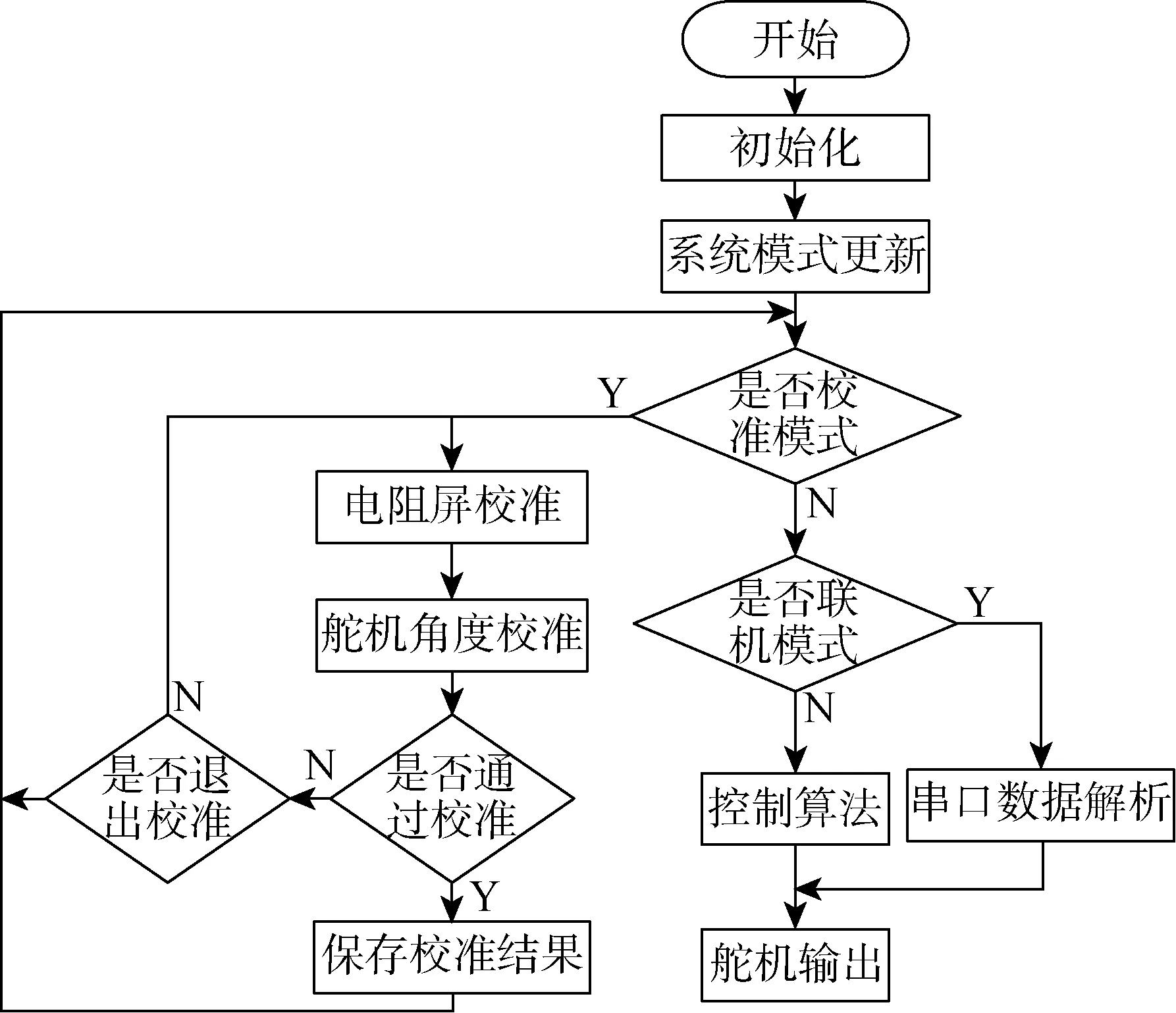
圖9 嵌入式軟件主程序流程圖Fig.9 Main program flow chart of embedded software
在嵌入式軟件設(shè)計還充分利用了定時器和中斷這2個單片機(jī)資源作為后端運(yùn)行程序,定時器用來控制程序運(yùn)行節(jié)奏,中斷用來接收外部輸入,比如按鍵串口接收數(shù)據(jù),電阻屏小球讀取等。前后端結(jié)合的方式有效地提高了程序的運(yùn)行效率[10-11]。
4 上位機(jī)軟件設(shè)計
上位機(jī)作為一種非常便捷的調(diào)試手段和下位機(jī)監(jiān)控手段在實(shí)際應(yīng)用中是非常常用的,本文采用python為編程語言,PyQt5為GUI框架為板球系統(tǒng)下位機(jī)設(shè)計了相配套對應(yīng)的上位機(jī)軟件,其框架如圖10所示。

圖10 板球系統(tǒng)上位機(jī)框架圖Fig.10 Host computer frame of Ball&Plate system
4.1 數(shù)據(jù)協(xié)議設(shè)計
下位機(jī)與上位機(jī)可進(jìn)行通信連接的關(guān)鍵是數(shù)據(jù)協(xié)議,即收發(fā)雙方互相可以正確解析所接收的消息,板球系統(tǒng)與上位機(jī)之間交互的信息比較單一,數(shù)據(jù)量適中,本次方案采用的是字符串?dāng)?shù)據(jù)協(xié)議,每一條字符串消息幀的字段與字段之間采用逗號分隔,數(shù)據(jù)協(xié)議格式如下:
〈起始符〉,〈消息類型〉,〈數(shù)據(jù)包〉,〈數(shù)據(jù)校驗(yàn)〉
其中數(shù)據(jù)包所包含的內(nèi)容根據(jù)消息類型來對應(yīng)解析。在本研究中所設(shè)計的消息類型有:心跳包、下位機(jī)硬件消息、系統(tǒng)狀態(tài)消息、小球?qū)崟r狀態(tài)消息、小球參數(shù)消息、控制指令消息以及設(shè)置指令消息等
4.2 程序設(shè)計
本研究中上位機(jī)編程采用的是python語言,上位機(jī)作為一個人-機(jī)交互,機(jī)-機(jī)通信的一個終端,更多的是處理交互邏輯,其本身不具備運(yùn)算密集型的特點(diǎn),對編程語言運(yùn)算性能要求并不高,python語言具備高效簡潔等特點(diǎn),而且python是一種很好的“膠水語言”,可以將各種編程語言進(jìn)行很容易地結(jié)合,因此選用python語言來做上位機(jī)既可滿足系統(tǒng)業(yè)務(wù)邏輯編程所需,也可提高上位機(jī)開發(fā)效率和降低后期維護(hù)成本,其“膠水語言”特性為二次開發(fā)留了很大的空間。
綜上,在上位機(jī)的程序設(shè)計充分利用python語言的高效性,遵循面向?qū)ο缶幊痰乃枷雽⒄w程序分為多個模塊逐個解耦設(shè)計對象,在上位機(jī)界面控件渲染顯示中利用了PyQt中信號和槽機(jī)制的手段,進(jìn)一步降低程序的耦合度。本研究的上位機(jī)程序設(shè)計中分為了串口程序設(shè)計、人機(jī)交互程序設(shè)計、圖像繪制程序設(shè)計、數(shù)據(jù)記錄程序設(shè)計以及算法導(dǎo)入程序設(shè)計。
采用多線程的方式,提高了上位機(jī)的使用體驗(yàn),特別在圖像繪制和串口數(shù)據(jù)處理上[12]。在小球控制算法導(dǎo)入中,不管何種算法最終都是輸出在2個舵機(jī)上進(jìn)而控制小球,利用這一特點(diǎn)結(jié)合python對象方法的重寫實(shí)現(xiàn)了算法導(dǎo)入功能,只要遵循相應(yīng)的代碼構(gòu)造方法即可實(shí)現(xiàn)不同控制算法的導(dǎo)入。
本次方案設(shè)計驗(yàn)證上位機(jī)所運(yùn)行的硬件環(huán)境為普通筆記本(Intel三代i5處理器),Windows10操作系統(tǒng),4GB內(nèi)存,由于上位機(jī)編程所采用的是有著跨平臺特性的python和pyqt,因此在其他操作系統(tǒng)的電腦上也是可以運(yùn)行的,最終完成的上位機(jī)界面如圖11所示。
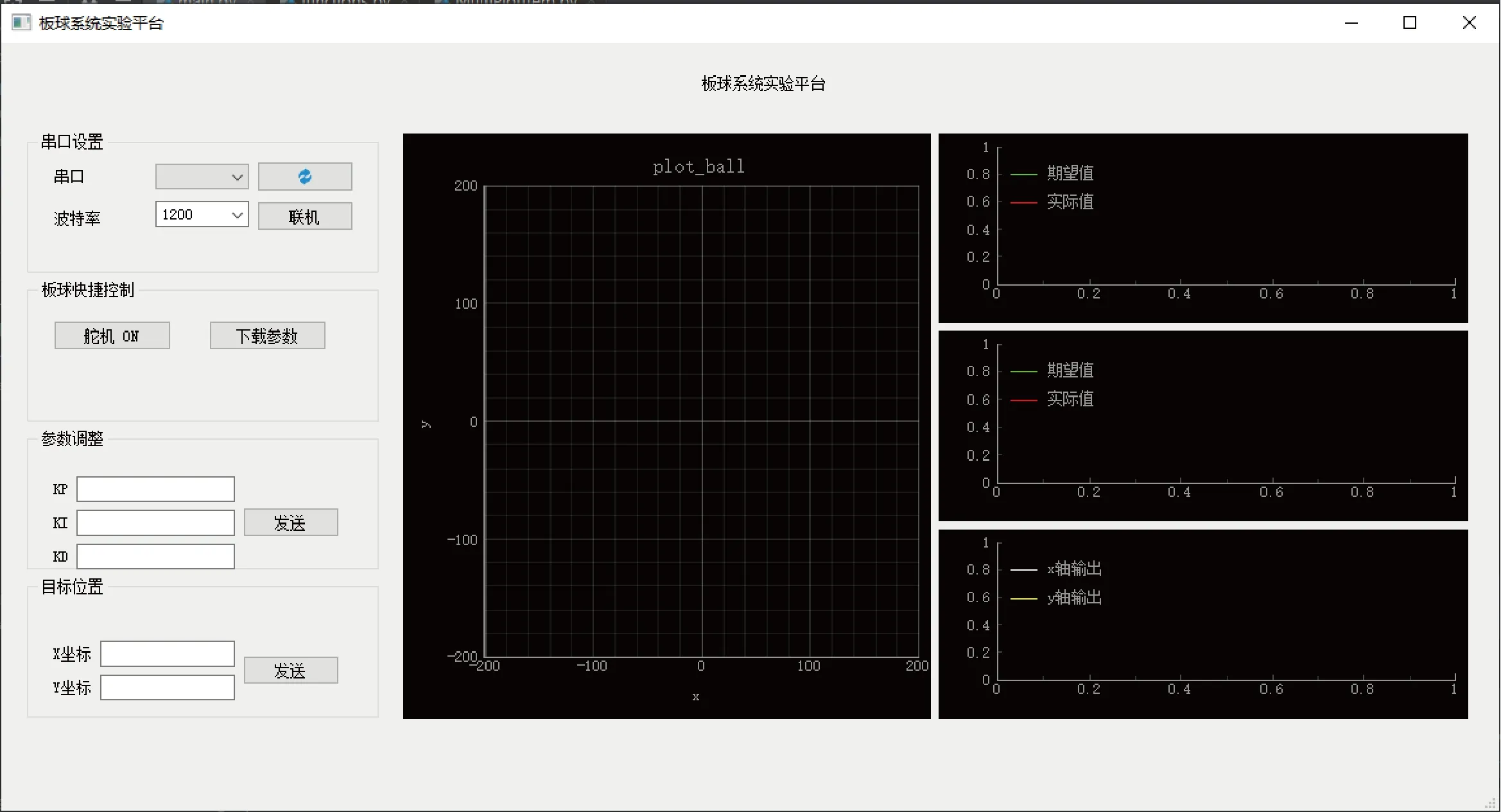
圖11 板球系統(tǒng)上位機(jī)界面圖Fig.11 Host computer interface of Ball&Plate system
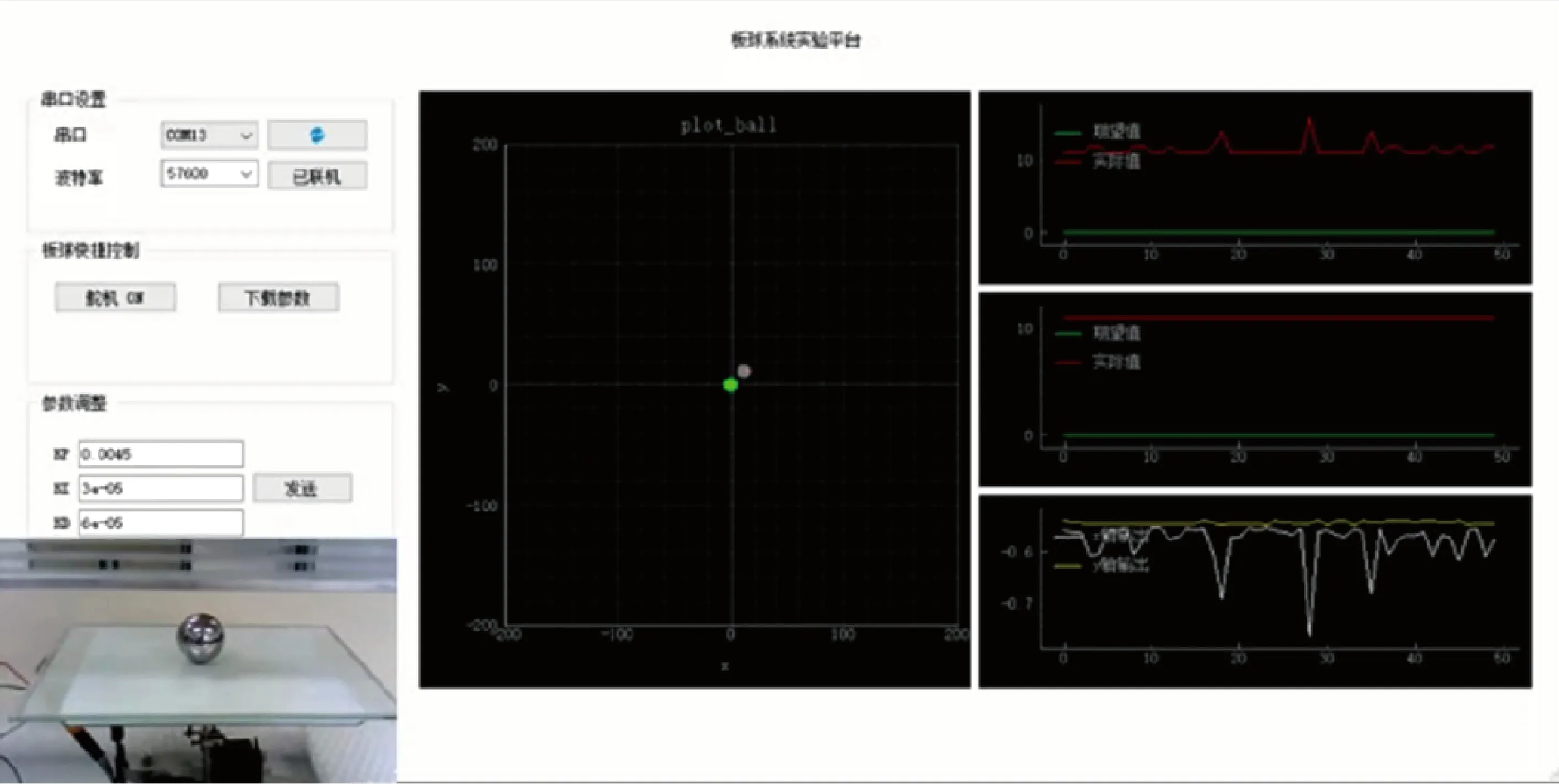
圖12 板球系統(tǒng)聯(lián)調(diào)界面圖Fig.12 Interface diagram of combined debugging of Ball&Plate system
5 結(jié)果分析
5.1 方案測試驗(yàn)證
最后下位機(jī)與上位機(jī)進(jìn)行聯(lián)調(diào)測試,進(jìn)行了上位機(jī)監(jiān)測板球系統(tǒng)運(yùn)行狀態(tài),參數(shù)調(diào)整,控制指令驗(yàn)證,基本PID實(shí)時控制等測試[13],實(shí)驗(yàn)過程如圖12所示,實(shí)驗(yàn)結(jié)果表明,下位機(jī)滿足板球系統(tǒng)的功能,上位機(jī)可實(shí)時監(jiān)測顯示板球系統(tǒng)的狀態(tài),并可以完成一些人機(jī)交互,對現(xiàn)有的板球系統(tǒng)是一個很好替代,但本研究的不足之處是沒有將matlab中的simulink硬件在環(huán)仿真所聯(lián)系起來,在算法調(diào)試有一定的局限,但通過后續(xù)的開發(fā),該部分功能可以實(shí)現(xiàn)。
由于本系統(tǒng)上位機(jī)開發(fā)采用的是python編程語言,采用的PyQt的GUI框架,兩者均有著非常好的跨平臺表現(xiàn),即相同的程序可運(yùn)行在windows、linux、mac等主流操作系統(tǒng)環(huán)境下,這將給相關(guān)科研工作帶來了極大的便利,可以非常容易的實(shí)現(xiàn)與其他項(xiàng)目進(jìn)行銜接。
5.2 方案對比分析與成本分析
下面以固高GPB2001為對比對象,從5個方面進(jìn)行對比分析。
(1) 在機(jī)械結(jié)構(gòu)上:GPB2001與本方案大體相同,不同的是GPB2001平板為圓形盤面,本方案為矩形盤面。
(2) 在驅(qū)動機(jī)構(gòu)方面:GPB2001采用伺服電機(jī),需要安裝編碼器等,機(jī)械結(jié)構(gòu)復(fù)雜,控制復(fù)雜。本次方案采用的舵機(jī)自身已是一個閉環(huán)系統(tǒng)。
(3) 在傳感器方面:GPB2001采用攝像頭采集小球位置,攝像頭造價高昂,程序復(fù)雜,且在運(yùn)行過程中收光線干擾嚴(yán)重,本研究方案采用的電阻屏成本低廉,使用簡單可靠。
(4) 在數(shù)據(jù)協(xié)議方面:GPB2001出于商業(yè)考量數(shù)據(jù)協(xié)議為私有協(xié)議,在二次開發(fā)上有很大的局限性,本研究方案數(shù)據(jù)協(xié)議采用常用的消息幀結(jié)構(gòu)協(xié)議,解碼簡單,方便二次開發(fā)接入其他系統(tǒng)。
(5) 在上位機(jī)軟件方面:GPB2001上位機(jī)軟件運(yùn)行系統(tǒng)環(huán)境為windows xp,而且沒有l(wèi)inux以及mac等系統(tǒng)下的軟件。本研究方案上位機(jī)軟件由于編程語言和框架所決定有良好的跨平臺性能。
最后對本方案所設(shè)計整體系統(tǒng)物料成本進(jìn)行統(tǒng)計分析,BOM表如表2所示,總價千元以內(nèi)即可實(shí)現(xiàn)一個滿足大部分需求的板球系統(tǒng)平臺,由于本次設(shè)計驗(yàn)證是按照制作一個樣機(jī)來采購物料的,部分零件如電容電阻螺絲螺母等有數(shù)量起售限制,實(shí)際成本要比BOM中所列出低,如果量產(chǎn),成本還可以進(jìn)一步降低。另外由于上位機(jī)等軟件所采用的語言為開源語言,所用的IDE等均免費(fèi),因此在軟件方面可以進(jìn)一步控制成本。
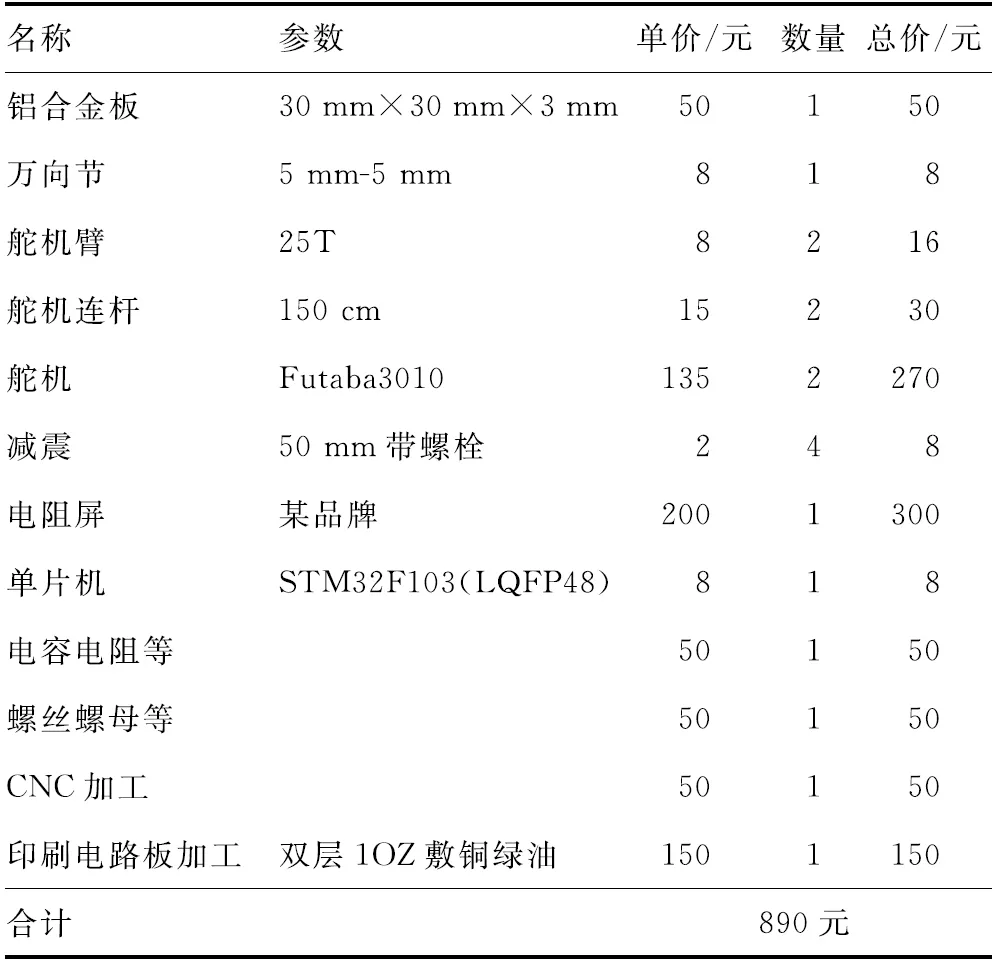
表2 板球系統(tǒng)物料表Tab.2 Ball&Plate bill of materials
綜上分析,在吸取了同類產(chǎn)品方案優(yōu)點(diǎn)的基礎(chǔ)上結(jié)合當(dāng)前較前沿的技術(shù)使得本研究方案更加有技術(shù)優(yōu)勢和創(chuàng)新性。而且在成本控制上有著更親民的價格,使其在自動控制實(shí)驗(yàn)室或其他領(lǐng)域有著更好的推廣價值。
6 結(jié) 語
針對現(xiàn)有板球系統(tǒng)平臺技術(shù)迭代升級較慢的問題,自行研究設(shè)計了一整套的完整的板球系統(tǒng)平臺,并驗(yàn)證了方案的可行性,通過實(shí)驗(yàn)驗(yàn)證本研究所提方案達(dá)到了課題的設(shè)計預(yù)期,證明了本課題的可行性和實(shí)用性,實(shí)現(xiàn)成本較低,而且提供了二次開發(fā)的接口,比傳統(tǒng)板球系統(tǒng)更加靈活,也為其他儀器開發(fā)設(shè)計提供了整套系統(tǒng)的解決思路,有較高的推廣價值和實(shí)用意義。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16