混合自動駕駛環境下快速路速度引導仿真
2021-01-05 00:35:26陳大山
應用技術學報 2020年4期
關鍵詞:模型
陳大山
(上海應用技術大學 軌道交通學院,上海 201418)
城市快速路作為城市內部的快速高效交通服務基礎設施,具有非常重要的作用,在城市道路交通基礎設施體系中,快速路占比不大,但是交通分擔率卻很高,上海市高架道路僅占市區道路面積的5%,卻承擔著市內35%的交通出行,北京市主要快速路占北京路網長度的8%,卻承載了近50%的車流量[1]。伴隨交通需求的跨越式增長以及交通擁堵與交通事故的頻發,在車路協調研究背景下,需要在城市快速路管理中引入主動交通集成管理。速度引導控制作為主動交通管理的重要組成部分,其對提高快速路通行能力、降低快速路事故的風險性與減緩甚至是消除交通擁堵具有一定的價值。同時,自動駕駛技術在近幾年來得到了廣泛的社會關注,IHS環球透視汽車部門曾預測2035年全球將擁有近 5 400 萬輛自動駕駛汽車,2050年之后,幾乎所有汽車或將是自動駕駛汽車。因此在全面自動駕駛時代到來之前,常規駕駛與自動駕駛混合的交通狀態將持續較長時間。混合自動駕駛環境下,對常規交通控制管理的理念、技術、方法等將帶來巨大的挑戰[2-4]。通過速度引導控制可以提高道路運行效率,降低事故發生率;然而在混合自動駕駛環境下,混合率直接影響控制效果。本文通過混合自動駕駛仿真環境下,對速度引導控制的效應分析,為精細化的速度引導控制提供支撐。
1 汽車自動駕駛環境
目前建模自動駕駛車輛可以分為2種方法,一種是基于修改交通流模型的建模,另外一種是基于實驗數據的建模。盡管基于真實的實驗數據更加的可靠,但是考慮到成本、安全性以及目前還不能夠實現完全自動駕駛實驗等原因,基于修改后的交通流模型建模方法在研究中應用更為普遍。由Treiber提出的智能駕駛人模型 (intelligent driver model,IDM)建模自動駕駛環境下車輛的行為具有一定的代表性[5]。與其他模型相比,IDM的模型需要標定的參數較少,而且IDM可以研究多種交通流狀態下的車輛交通行為,IDM模型公式如下:
式中:a(k)為k時段加速度;v(k)為當前車輛的速度;v0為車輛的期望速度;s(k)為車輛的車輛間距;s0為最小車輛間隔;HW為車頭時距;Δv(k)為車輛的速度差;a為最大加速度;b為期望減速度,期望速度v0與k時段的速度引導控制值相同。自動駕駛車輛通過采用較常規駕駛員駕駛更小的車頭間距,如果自動駕駛車輛相互跟隨,則服從自動駕駛跟馳模型,擁有最小的車頭間距,如果自動駕駛車輛跟隨常規駕駛車輛,其車頭間距較常規車輛跟馳的車頭間距要小,基于IDM模型,采用微觀仿真軟件VISSIM來模擬車輛自動駕駛環境。
2 快速路速度引導控制
對于快速路速度引導控制,國內外研究學者進行了一系列的研究。楊兆生等[6]通過城市快速路匝道調節與動態速度引導協調控制,根據歷史數據統計分析與專家經驗針對多種不同交通狀態進行速度引導控制;李家寶等[7]面向實際應用采用模糊邏輯來確定限速值,考慮的因素主要有車輛群狀態與路面狀態;林尚偉等[8]同樣采用模糊邏輯來確定限速值,考慮的因素有路段平均車流密度和路面狀態估計值。梁新榮等[9]認為限速控制系統是一個非線性時變系統,難于用數學模型準確建模,提出一種模糊神經網絡實現限速控制,通過分析車輛群狀態、路面性能、氣象條件等,建立交通流速度限制模糊神經網絡模型,并進行了仿真研究。Allaby等[10]采用的策略是根據流量、車輛速度與占有率進行二叉樹分析進而確定速度值,是基于規則的控制策略,簡單高效易于實現。確定合理速度引導值對于交通運行效果有很大的影響,國外多以85%位車速作為限速值,85%位車速改善行程安全與效率決定于道路上車輛速度分布的離散程度,當道路較為擁擠時,車輛離散程度較大,85%位車速限制顯得不夠精細。為充分考慮交通流參數以及速度引導控制的靈活適應性,速度引導值采用Khondaker模型[11],即:

3 仿真系統框架
速度引導仿真系統使用VISSIM軟件來模擬現實的交通世界;交通流模型的數值建模及求解在MATLAB軟件中實現;VISSIM、MATLAB的接口函數來實現數據交換和控制策略。因此在線仿真系統按照功能定位可以劃分為3個功能模塊,分別是仿真模塊、策略實現模塊和接口模塊,如圖1所示。

圖1 仿真框架Fig.1 Simulation framework
通過使用外部駕駛員模型的動態鏈接庫(dynamic link library,DLL)接口來實現IDM模型,VISSIM通過實時調用外部駕駛員動態鏈接庫函數,來實現車輛行為的改變。
4 道路安全評估
道路安全評估可以直接評估也可以通過間接的方法來評估。直接的評估方法以交通事故統計為基礎,該方法簡單易操作,在日常道路交通管理中應用較為廣泛,但是也存在一定的弊端,比如道路交通事故絕對數據相對較少、統計周期相對較長、事故的隨機性較大等問題。交通沖突技術是間接交通安全評價方法中的代表性方法,其具有沖突數量相對較多、周期較短、規律性較強等特點,在道路交通安全研究領域得到了極為廣泛的應用研究;但人工觀測交通沖突方法主觀隨意性較大,同時需要耗費大量人力物力。因此美國聯邦公路局開發了間接安全分析模型(surrogate safety assessment model,SSAM)[12],用來分析微觀仿真模型輸出軌跡文件的軟件,其可以利用交通沖突技術進行安全評價。

圖2 快速路圖Fig.2 Simulated expressway

圖3 中低流量下不同自動駕駛比例沖突數量Fig.3 Number of conflicts under low-medium traffic flow and different autonomous vehicles
5 案例仿真分析
案例仿真分析的實體路段及走向如圖2所示,其為上海市內環快速路外環方向黃興路至西藏北路長度約為5 km。該研究路段包含因車道減少而導致的常發性瓶頸點且路段線形變化較大,為研究速度引導控制效應分析提供了一個直接的目標對象。該快速路段分為8個路段,每個路段分別設有速度引導控制,速度引導變化周期為1 min。
混合自動駕駛環境下快速路速度引導仿真分析從混合率與交通量兩個方面進行研究,自動駕駛車輛比例從0%按照10%遞增到100%。其中0%為無自動駕駛車輛,100%為完全自動駕駛車輛。交通量從 1 000 veh/h按照500 veh/h步長逐漸遞增到 3 500 veh/h。仿真研究6類交通量模式,其中模式A、B、C對應為中低流量;模式D、E、F對應為高流量,每種模式下對應于不同的自動駕駛車輛比例。在仿真平臺中進行多種模式的測試分析,選取主線1 km路段作為行程時間監測段;不同交通需求模式下進行行程時間統計分析,同時在不同的交通模式與自動駕駛車輛比例條件下,通過SSAM沖突分析軟件分析仿真輸出的車輛軌跡文件,對沖突數據進行統計分析,最終結果如圖3~6所示。
圖3為在中低流量模式下的沖突數量,隨著自動駕駛車輛比例的提高,車輛的沖突數量呈減少的趨勢,同時隨著車量的增加,沖突的數量也不斷的增多,但不同自動駕駛比例之間變化不大。圖4為高流量模式下沖突的數量,由圖4可見,隨著自動駕駛車輛比例的提高,沖突數量并沒有明顯的規則變化。圖5為中低流量下不同自動駕駛比例行程時間,由圖5可見,在不同流量模式下隨著自動駕駛比例的提高,監測路段行程時間具有較好的穩定性。
圖6為高流量下不同自動駕駛比例行程時間。由圖6可見,盡管加入了自動駕駛,因為整體流量水平較高,難以保持行程時間的可靠性,自動駕駛比例對于行程時間的影響無明顯規則。結果表明,基于混合自動駕駛環境下的速度引導控制,在中低流量模式時行程時間與沖突數量都隨自動駕駛比例的提高有一定的減少,而且行程時間的穩定性較高;在高流量模式下,自動駕駛車輛比例對于沖突數量與行程時間無明顯的規則。因此在速度引導應用于實踐過程中需要對其邊界條件進行詳細的分析,使得速度引導控制正面效應最大化。
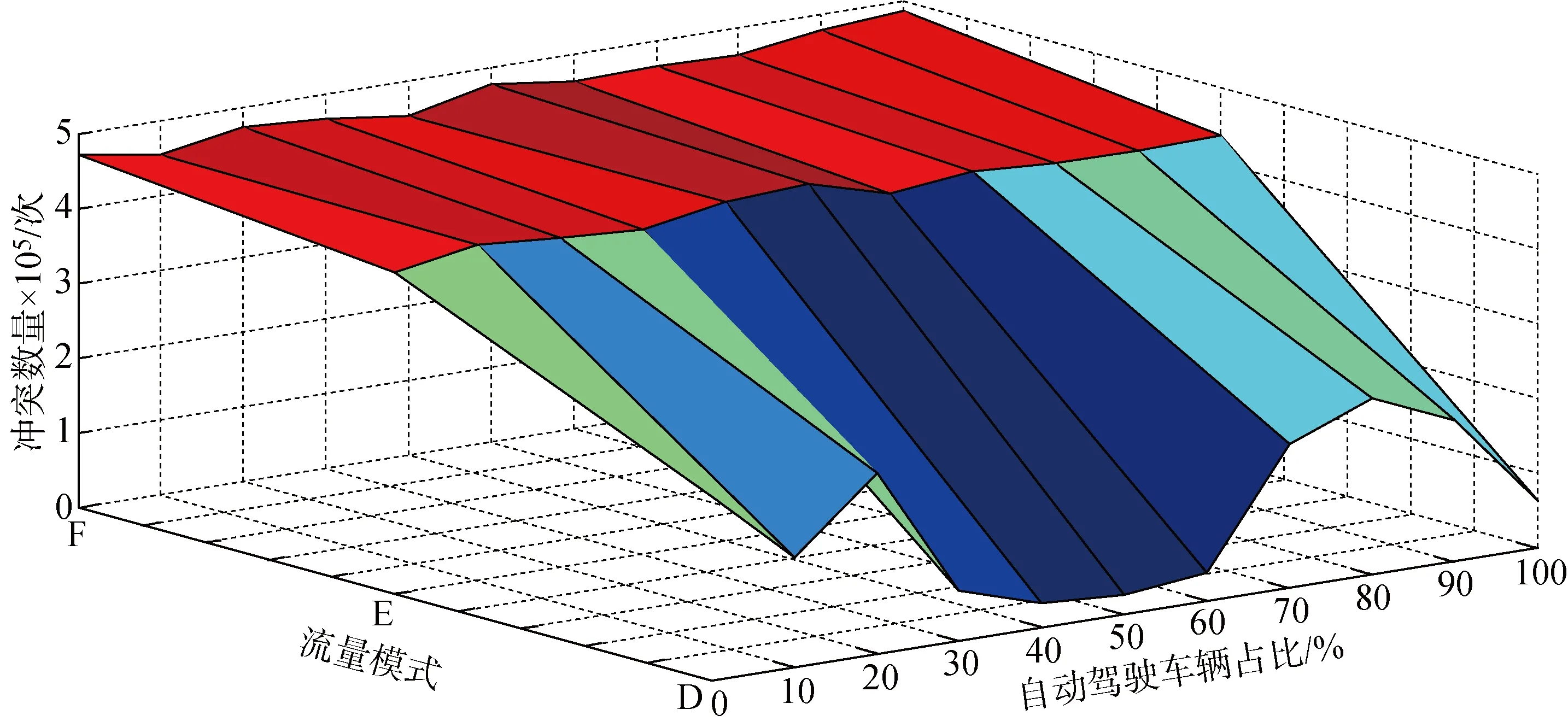
圖4 高流量下不同自動駕駛比例沖突數量Fig.4 Number of conflicts under high traffic flow and different autonomous vehicles
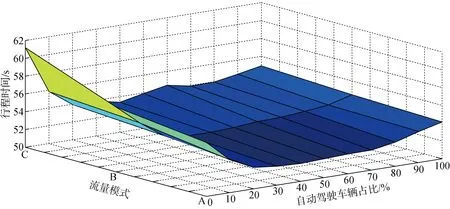
圖5 中低流量下不同自動駕駛比例行程時間Fig.5 Travel time under low-medium traffic flow and different autonomous vehicles
6 結 語
建立混合自動駕駛環境下快速路速度引導仿真分析平臺,通過VISSIM與MATLAB進行數據交換與控制策略實施,對比分析了多種交通模式在不同的自動駕駛比例下速度引導控制效應,表明速度引導控制在中低交通量模式時,隨著自動駕駛比例的提高,道路的安全與效率都得到改善。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19