基于雙目視覺的植物三維重建方法及應用
2021-01-05 13:14:01孫茜鄭書河
安徽農業科學 2021年24期
孫茜 鄭書河


摘要 概述了雙目視覺技術與基于雙目視覺的三維重建方法,介紹了基于雙目視覺的三維重建技術的發展歷程,分析了近幾年基于雙目視覺的三維重建方法在重構植物三維模型中的應用進展,提出了一種基于雙目視覺技術的茶梢冠層三維重構的方法。該方法具有成本低廉、易于實現、受光照影響小、實時性好等優點,適合在自然環境中對果實、植物冠層等進行三維重建,可為果蔬采摘、植物生長狀況監測、樹木修剪等領域的研究提供有益參考。
關鍵詞 雙目視覺;三維重建;植物可視化;茶梢冠層
中圖分類號 S126? 文獻標識碼 A
文章編號 0517-6611(2021)24-0011-07
doi:10.3969/j.issn.0517-6611.2021.24.003
Method of Plant 3D Reconstruction Based on Binocular Vision and Its Application
SUN Qian,ZHENG Shu-he (College of Mechanical and Electrical Engineering,Fujian Agriculture and Forestry University,Fuzhou,Fujian 350002)
Abstract Introduced the binocular vision technology,the 3D reconstruction method and the historical development of the 3D reconstruction technology based on binocular vision.We also analyzed the application progress of 3D reconstruction method in reconstructing 3D model of plants,proposed a method of 3D reconstruction of tea canopy based on binocular vision technology,and pointed out the future development trend of this method.This method has the advantages of low cost,easy implementation,less affected by illumination,and better real-time performance.It’s suitable for the 3D reconstruction of fruits and plant canopy in the natural environment,it provided a useful reference for research in the fields of fruit and vegetable picking,plant growth monitoring,and tree pruning.
Key words Binocular vision;3D reconstruction;Plant visualization;Tea crown layer
基金項目 茶園全程機械化作業關鍵技術研究(K1520005A05);福建省自然科學基金(2017J01423)。
作者簡介 孫茜(1996—),女,黑龍江綏化人,碩士研究生,研究方向:茶樹冠層三維重建技術。*通信作者,教授,博士生導師,從事智能農業裝備研究。
收稿日期 2021-07-14
智慧農業的研究和應用日益蓬勃發展,逐步成為全球農業發展的大趨勢,植物的可視化研究也逐漸成為研究熱點[1-2]。植物可視化是將植物學、計算機圖形學、仿真、傳感器等專業知識結合在一起,使植物的形態結構在計算機上逼真重現的技術[3-4]。通過植物可視化技術,可以實現在計算機上模擬植物的生長過程[5-7]、重建植物單個器官的三維模型[5-7]、植物冠層生理生態功能仿真計算[8-10]、植物的表型分析[11]等操作。植物可視化的實現依賴于植物三維重建技術,是進行植物生長過程模擬的前提[12],是植物冠層生理生態功能仿真計算的關鍵,在植物表型分析中扮演著至關重要的角色,對實現植物虛擬仿真分析、決策及應用,推廣智慧農業具有十分重要的意義[13]。
雙目立體視覺技術模擬人眼獲取相同點產生的視差從而進行目標三維重建,獲取三維圖像[14-15]。與三維數字化儀等獲取植物點云信息的方式相比,雙目立體視覺技術成本更低、數據處理更少、實時性更好[16];與Kinect等獲取深度圖像方式相比,雙目立體視覺技術對硬件、成本要求更低,不易受到光照的影響[17-18];與基于模型的三維重建技術相比,雙目立體視覺技術計算復雜度更小,系統實時性更高[19];與基于多視角圖像三維重建技術相比,雙目立體視覺的設備和模型更簡單易實現,更適合戶外場景的重建。
1 雙目視覺技術概述
1.1 雙目視覺系統簡介
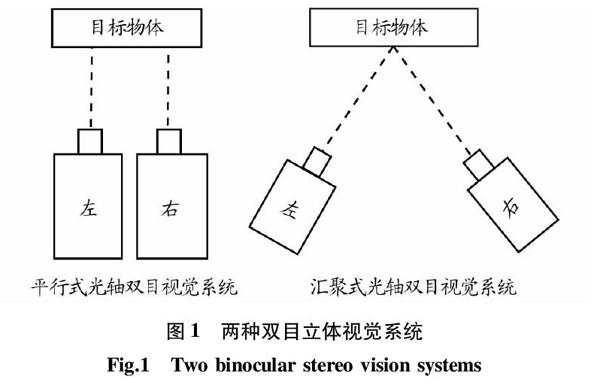
雙目立體視覺是機器視覺的一個重要分支,它模仿人的視覺原理獲取圖像的深度信息,將二維圖像轉換為三維圖像,使機器具有感知三維空間的能力[20]。雙目視覺系統分為兩種[21]:一種是平行式光軸雙目視覺系統[22],另一種是匯聚式光軸雙目視覺系統[23],其中平行式光軸雙目視覺系統是雙目視覺系統在理想狀態下的一種形式,而在實際的工作中由于安裝誤差等因素,使用的雙目視覺系統為匯聚式光軸雙目視覺系統(圖1)。
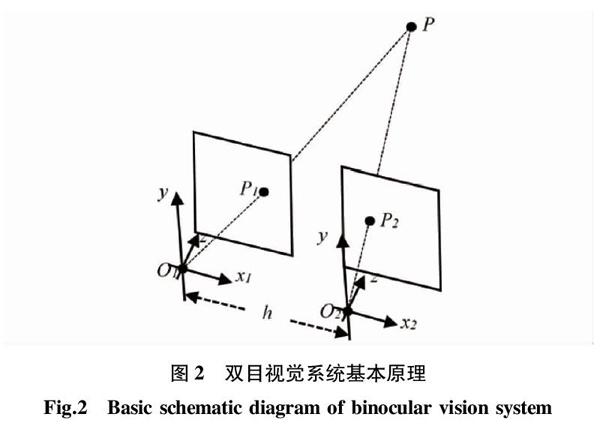
雙目立體視覺是利用視差原理的一種機器視覺方法,該方法利用三角測量原理進行三維信息的獲取,基本原理如圖2所示。
基于雙目視覺的三維重建方法大致可以分為5個步驟,分別是圖像采集、雙目相機標定、圖像矯正、立體匹配和三維重建[24-25]。
①圖像采集:圖像采集是采用兩臺相同的相機左右平行放置,同時獲取同一個場景中的目標物體圖像。在采集圖像后需要對圖像進行預處理,為后續工作做準備。
②雙目相機標定[26]:雙目相機標定是為了獲取相機的內參和外參系數,有了相機的內外參數可以對相機拍攝的圖像進行校正,并對畸變進行優化,得到畸變相對較小的圖像,為立體匹配提供約束條件,為三維重建提供所需的相機參數。
③圖像矯正:在實際的雙目立體視覺系統中,無法保證兩相機的絕對平行,以及相機的本身存在一定的畸變,所以要對采集的圖像進行校正。雙目校正主要利用極線約束,使兩張圖像的同一特征點處在同一水平直線上,這樣在特征匹配時只需要在極線上進行搜索匹配,而不是搜索整個二維圖像,大大減少了匹配的計算量。
④立體匹配[27]:立體匹配就是將左右兩張圖像上的特征點對應匹配起來。根據優化理論方法的不同可以分為局部匹配和全局匹配。立體匹配是對物體進行三維重建中至關重要的一步,立體匹配結果的好壞決定著三維重建的結果是否精準。
⑤三維重建[28]:雙目視覺方法中的三維重建是采用三角測量原理計算獲取的立體匹配圖像的深度值,從而可以得到稠密的三維空間點云,隨后,再對獲取的三維空間點云進行網格化和差值計算,進而可以得到物體的三維結構模型。
1.2 雙目立體視覺技術發展歷程
在19世紀30年代,Wheatstone[29]論證了人具有立體視覺,成為了雙目立體視覺的開端。從20世紀50年代開始,就不斷有科研人員提出雙目視覺的相關原理。Aschenbrenner[30]提出了隨機立體圖原理,該原理假設兩幅圖像上的隨機點一一對應,將任意一個隨機點在兩個圖像中的位移進行編碼表示,即可得到該點的深度,此過程叫做立體匹配。Julesz等[31-33]的研究中也得出了類似的結論,對同一場景的左右兩幅圖像進行特征點提取,完成兩幅圖像視差的計算。
20世紀60年代,麻省理工學院Roberts在對簡單規則的多面體三維結構進行研究后認為,三維物體可以簡單地用二維的形狀組合來表示,利用計算機實現二維圖像的立體匹配[34]。隨著研究的深入,研究的范圍逐漸擴大,立體匹配方法得到了持續的完善。
20世紀70年代,麻省理工學院Marr和Poggio提出了一種計算視覺理論[35],該理論通過3種限制條件,完成隨機點立體視圖的融合。Marr提出的D.Marr計算視覺理論框架,極大地推動了立體視覺技術的發展,使得立體視覺成為計算機視覺中一個很重要的分支。在該理論被提出后不久,Grimson[36]對該算法進行了進一步的推導,證明其能夠應用于自然環境中的圖像的匹配。
自此,在計算機視覺領域,涌現了大量的基于D.Marr計算視覺理論的新的立體視覺方法,使立體視覺技術得到快速的發展,并在航天測繪、機器人視覺、軍事運用、醫學成像和工業檢測等領域得到廣泛應用[37]。
ASADA等[38]
設計了一款立體視覺伺服系統,利用雙目立體視覺系統預測物體的運動方向從而實現自適應跟蹤。Fang等[39]設計了一款智能車輛系統,該系統采用了傳感器融合方法,電磁波探測和雙目立體視覺疊加對道路信息進行識別,實現道路信息的三維重建,可以較為精確地測量出車輛高速移動時的距離信息。上海交通大學的自主機器人實驗室設計了6款月球漫游機器人[40],它們全部采用雙目視覺系統來實現導航和避障功能。阮曉東等[41]提出了一種基于立體視覺的多自由度機器裝置姿態的測量方法,該方法算法簡單,計算量小,可以準確測量機器裝置的自由度特征點坐標。高慶吉等[42]采用了異構雙目活動視覺系統實現全自主足球機器人導航,該系統由固定攝像機和可以水平旋轉的攝像機組成,可以通過兩臺相機的協調來對目標進行多視角捕捉和數據融合,以提高測量精度。2013年成功發射的嫦娥三號月球車利用雙目視覺技術進行導航,共安裝了3對立體相機,分別用來實現導航、避障等不同的功能[43]。
2 基于雙目立體視覺的植物三維重建方法研究進展
近年來,隨著基于雙目視覺的三維重建技術在工業、航空航天等領域的日益成熟,國內外對基于雙目視覺的三維重建技術在植物領域的應用研究熱度很高,該技術針對研究對象搭建合適的雙目立體視覺系統獲取研究對象的左右兩幅圖像,然后在進行相機標定后,利用圖像處理技術和立體匹配技術獲取研究對象的三維信息,對其進行三維重建。目前國內外對于基于雙目立體視覺的植物三維重建技術的研究主要集中在果蔬的定位采摘、植株的表型分析和對植株的部分器官進行三維重建3個方面。
2.1 果蔬的定位采摘
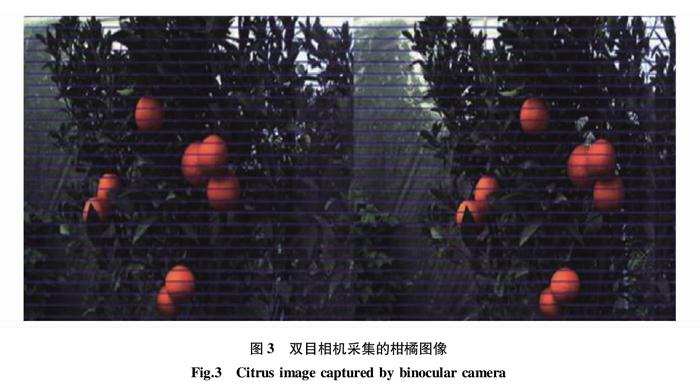
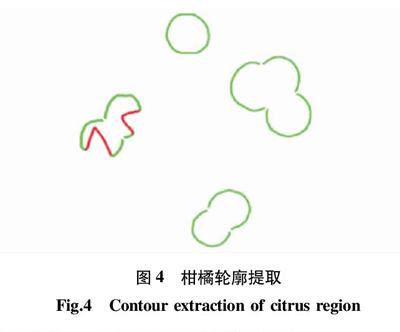
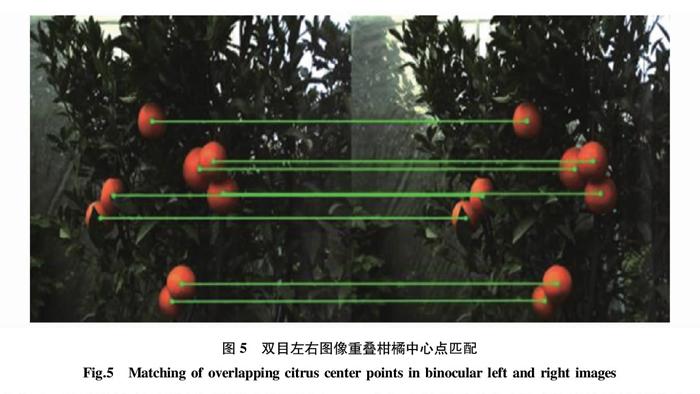
劉妤等[44]提出了一種基于雙目視覺的戶外柑橘空間定位法,該方法采用匯聚式光軸雙目視覺系統采集柑橘的左右圖像(圖3),結合LAB和HSV色彩空間對柑橘區域進行提取篩選(圖4),確定柑橘的中心點,完成中心點的匹配(圖5),再利用雙目立體視覺的視差原理,獲取柑橘的三維坐標信息,確定柑橘的遮擋關系,并按照深度值對柑橘進行排序(圖6)。將該方法與人工測量值進行對比,誤差為6.38 mm,可以滿足柑橘采摘機器人作業的精度要求。
此外,還有許多的國內外學者利用雙目視覺技術對果蔬進行定位,為采摘提供機器視覺基礎。王磊等[45]開發了一種基于嵌入式ARM的蘋果采摘雙目視覺系統。該系統結合CMOS雙目攝像頭和ARM cotexA9四核處理器開發一款專用的采摘機器人視覺處理模塊,經過目標提取、立體匹配等操作,并對BM、SGBM和AD Census 3種算法進行對比,發現ADCensus算法的誤差最小,在2.4 m內可以對采摘目標進
行精確測距并實時顯示,可以滿足采摘機器人的快速定位要求。周云成等[46]提出了一種基于自監督學習的番茄植株圖像深度估計模型,該模型可以根據雙目相機輸入的圖像對植株進行深度估計。試驗結果表明,該模型對植株進行深度估計的相對誤差可以控制在2.5 cm內,可以為農業機械的視覺模塊提供一定的理論依據。Jafari等[47]采用平行式光軸雙目視覺系統采集櫻桃樹圖像,用ABLM和ABGM兩種匹配算法分別對櫻桃樹圖像進行立體匹配,得到視差圖后發現ABGM算法更好,并且在自然條件下是具有魯棒性的。
通過雙目視覺技術中立體匹配得到的視差圖獲取的植物深度信息誤差較小,實時性較高,可以為果蔬采摘機器人快速定位提供技術支持和理論依據。
2.2 植株的表型分析 Nugroho等[48]提出了基于深度感知的立體相機植物高度監控系統(圖7),使用平行式光軸雙目視覺系統獲取植物圖像,對植物進行三維重建,根據獲得的植株三維模型對植株的高度進行測量。與人工測量結果進行對比,試驗結果表明,測量萵苣誤差最大為5.56 cm,決定系數大于0.7,可以進行植株的高測量,但是仍需要進行改進,將誤差最小化。
殷悅等[49]建立了基于雙目立體視覺的植物虛擬生長模型的人機交互系統,該系統利用雙目相機對擬南芥的圖像進行采集,使用MATLAB、OpenCV和OpenGL完成擬南芥的三維重建,獲取擬南芥的表型參數。與真實值進行線性擬合對比,葉片長度的相關系數為0.940 4,葉片寬度的相關系數為0.974 0,莖稈長度的相關系數為0.986 2,誤差均在±5%內,該系統對擬南芥進行三維重建具有一定的可靠性。楊鵬樹等[50]開展了作物苗期農田障礙物三維信息檢測方法的研究,提出了一種基于雙目視覺特征的障礙物檢測算法。首先利用圖像分割算法去除天空和作物苗背景,提取障礙物的邊緣,確定障礙物的目標區域,然后通過重心特征點立體匹配獲取視差圖,結合相機標定參數進行三維重建,最后計算障礙物的距離、寬度和高度等三維信息。與實際測量值對比,結果表明:障礙物三維信息的平均相對誤差分別為4.70%、5.79%和1.78%,可以較好地滿足田間障礙物檢測的需求。ZOYMAK1[51]建立了雙目立體視覺系統,基于LabVIEW編程語言對作物和雜草進行三維重建,提取作物和雜草的三維信息,對作物和雜草進行區分。將立體視覺的結果與物理測量結果進行比較,作物和雜草的相關系數r分別為0.981和0.989,試驗結果表明該系統能夠測量深度信息,為區分作物和雜草提供理論依據。Bao等[52]開發了一種高通量的基于現場的機器人表型分析系統,該方法結合了最新的立體匹配算法,對高粱進行三維重建后,提取植株表型信息,如:植株高度、植株寬度、植株表面積、莖直徑等。
使用雙目視覺技術對植物進行表型分析,提取植株的表型參數的結果顯示,該方法可以對植株的表型參數進行提取,且誤差較小,但是植物的表型分析需要的精度較高,對于此方向的應用應當繼續改進優化。
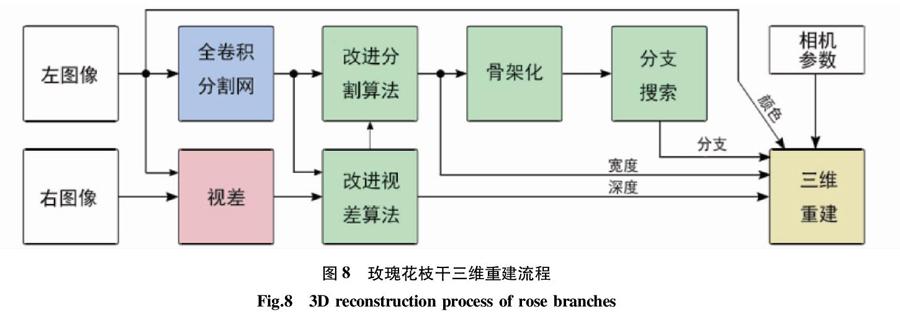
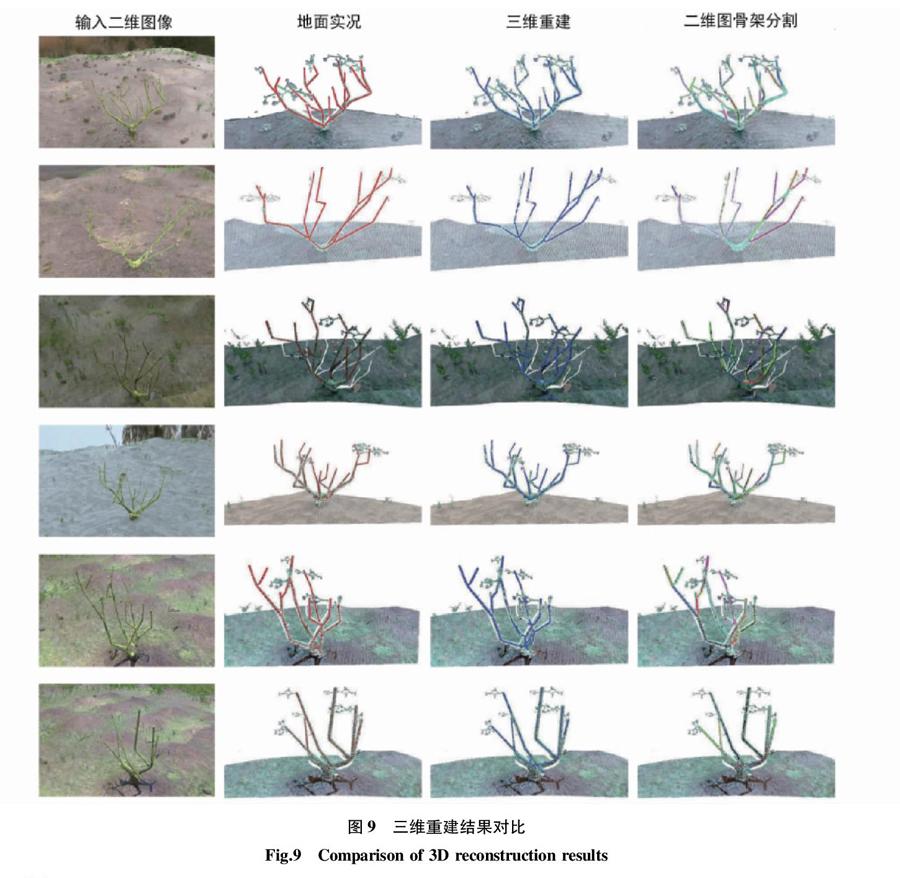
2.3 植株部分器官的三維重建 Hanz等[53]根據玫瑰花叢修剪規則使用雙目立體視覺系統對玫瑰花枝干進行三維重建,重建流程見圖8。該方法首先使用全卷積分割網絡(FSCN)對左側圖像進行分割,然后根據視差方法計算植物圖像的深度,結合分割圖像和視差圖像計算玫瑰花的骨架和分支結構,最后進行三維重建。該方法在室內和室外不同的環境下進行試驗,對各個步驟進行了評估,與實際數據和取得較好結果的二維圖骨架分割方法進行了比較(圖9),該方法的分割準確度提高了1.26%,視差圖像的誤差從0.252 7降到了0.086 9,整體重建與地面的距離與真實值的誤差僅為0.859 0 cm,表明該方法的穩定性較好,三維重建的準確度較高。
殷小舟等[54]利用雙目立體視覺系統對非洲菊等花卉進行三維重建,采用Delaunay三角部分重建了花卉的曲面模型,該方法較好地還原了花卉的真實面目,具有快速、無損等特點,其不足之處在于必須采集花卉頂部的圖像,花卉的側面以及花卉的花蕊部分重建效果不甚理想。賀磊盈等[55]以無葉山核桃樹為研究對象,根據果實自適應振動收獲方式的需要,研究了一種利用雙目視覺技術基于雙輪廓同步跟蹤的果樹枝干三維重建方法,該方法結合了閾值分割算法和輪廓跟蹤技術對果樹的枝干進行提取,細化后得到枝干骨架并用二叉樹進行描述,然后根據拓撲結構、極線約束及形狀的相似性匹配得到雙視圖中樹枝骨架對應關系,最后對山核桃樹枝干進行三維重建。試驗結果表明,使用該方法重建的三維枝干與真實枝干在視覺上很接近,估測的枝干半徑與實測的半徑間相對誤差小于9%,該方法可以為果實的自適應振動收獲提供技術參考。Dandrifosse等[56]提出了基于立體視覺成像小麥冠層的方案,該方案使用雙目立體視覺系統采集小麥冠層的圖像,使用MATLAB立體相機校準器對立體視覺系統進行校準后,采用SVM分類集對圖像進行分割,然后利用LAI和MTA算法生成每個圖像的三維點云,最后利用Delaunay三角剖分法將三維點云轉換為三維網絡,完成三維重建。
對植物進行三維重建完成植株的可視化,需要較高的重建精度,可以將植物的模型完整清晰地重構出來,但是目前的研究結果不夠理想,需要繼續優化拍攝角度,提高算法精度。
3 一種基于雙目視覺的茶梢冠層三維重構方法
茶起源于中國[57],茶產業一直是中國農業經濟的重要產業[58-59],同時也是傳播中華文化的重要途徑。智慧茶園是智慧農業的一部分,可以更好地幫助茶農管理茶園,同時以可視化的方式將茶園的數據信息傳輸到網絡上對茶葉的品質、產量進行分析,為消費者提供品質保障。茶梢冠層的三維重構可以為茶園可視化提供一定的技術支持和理論依據。
實現茶園可視化需要滿足任何時間在茶園的任意地點都可以對有代表性的茶梢冠層序列進行三維重構的要求,這就需要選用的三維重建技術具有成本低、天氣影響小、速度快等優點。而基于雙目視覺的三維重建技術就可以滿足上述要求,只要在茶園內擺放好足夠數量的雙目視覺系統,就可以對茶梢冠層進行三維重構,輸出茶梢冠層的表型信息,讓用戶直觀地觀察到茶梢的生長情況,同時也可以為茶樹的修剪采摘定位提供一定的依據,具體的技術路線如圖10所示。
4 小結
基于雙目視覺的三維重建方法具有成本低廉、易實現、受光照影響較小、實時性較好等優點,更適合在室外的自然環境中對果實、植物冠層等進行三維重建,可以廣泛地應用于果蔬定位采摘、植物生長狀況監測,樹木修剪等領域。基于雙目視覺的茶梢冠層三維重構方法不受天氣影響,可以隨時為用戶提供茶梢冠層生長的三維模型,為智慧茶園的早日實現提供一定的理論參考。
參考文獻
[1] 趙春江,陸聲鏈,郭新宇,等.數字植物研究進展:植物形態結構三維數字化[J].中國農業科學,2015,48(17):3415-3428.
[2] 趙春江.智慧農業發展現狀及戰略目標研究[J].智慧農業,2019,1(1):1-7.
[3] 劉丹,諸葉平,劉海龍,等.植物三維可視化研究進展[J].中國農業科技導報,2015,17(1):23-31.
[4] 周靜靜,郭新宇,吳升,等.基于多視角圖像的植物三維重建研究進展[J].中國農業科技導報,2019,21(2):9-18.
[5] PRUSINKIEWICZ P,LINDENMAYER A.Developmental models of herbaceous plants[M]//PRUSINKIEWICZ P,LINDENMAYER A.The Algorithmic beauty of plants.New York:Springer,1990.
[6] BRADBURY R.Fractal modelling:Growth and form in biology[J].Journal of experimental marine biology & ecology,1995,185(1):131-132.
[7] 趙星,DE REFFYE PHILIPPE,熊范綸,等.虛擬植物生長的雙尺度自動機模型[J].計算機學報,2001,24(6):608-615.
[8] CHELLE M,ANDRIEU B.The nested radiosity model for the distribution of light within plant canopies[J].Ecological modelling,1998,111(1):75-91.
[9] DA SILVA D,BOUDON F,GODIN C,et al.Multiscale framework for modeling and analyzing light interception by trees[J].SIAM journal on multiscale modeling & simulation,2008,7(2):910-933.
[10] DRAGONI D,LAKSO A N,PICCIONI R M.Transpiration of apple trees in a humid climate using heat pulse sap flow gauges calibrated with whole-canopy gas exchange chambers[J].Agricultural & forest meteorology,2005,130(1/2):85-94.
[11] 黃偉.基于植物生長過程仿真的虛擬植物建模研究[D].重慶:重慶大學,2011.
[12] 胡鵬程,郭焱,李保國,等.基于多視角立體視覺的植株三維重建與精度評估[J].農業工程學報,2015,31(11):209-214.
[13] 劉剛,司永勝,馮娟.農林作物三維重建方法研究進展[J].農業機械學報,2014,45(6):38-46.
[14] 趙晨園,李文新,張慶熙.雙目視覺的立體匹配算法研究進展[J].計算機科學與探索,2020,14(7):1104-1113.
[15] 黃鵬程,江劍宇,楊波.雙目立體視覺的研究現狀及進展[J].光學儀器,2018,40(4):81-86.
[16] 溫維亮,郭新宇,趙春江,等.基于三維數字化的玉米株型參數提取方法研究[J].中國農業科學,2018,51(6):1034-1044.
[17] 方志力,溫維亮,郭新宇,等.基于Kinect的三維玉米植株骨架提取[J].系統仿真學報,2017,29(3):524-530.
[18] 余秀麗,王丹丹,牛磊磊,等.Kinect在現代農業信息領域中的應用與研究進展[J].農機化研究,2015,37(11):216-221.
[19] 趙元棣,溫維亮,郭新宇,等.基于參數化的玉米葉片三維模型主脈提取[J].農業機械學報,2012,43(4):183-187.
[20] 朱袁旭.基于多視角圖片的三維重建算法實現[D].南京:東南大學,2019.
[21] 鄭太雄,黃帥,李永福,等.基于視覺的三維重建關鍵技術研究綜述[J].自動化學報,2020,46(4):631-652.
[22] ZOU X J,ZOU H X,LU J.Virtual manipulator-based binocular stereo vision positioning system and errors modelling[J].Machine vision and applications,2012,23(1):43-63.
[23] 李占賢,許哲.雙目視覺的成像模型分析[J].機械工程與自動化,2014(4):191-192.
[24] 張文明,劉彬,李海濱.基于雙目視覺的三維重建中特征點提取及匹配算法的研究[J].光學技術,2008,34(2):181-185.
[25] BRUNO F,BIANCO G,MUZZUPAPPA M,et al.Experimentation of structured light and stereo vision for underwater 3D reconstruction[J].ISPRS journal of photogrammetry and remote sensing,2011,66(4):508-518.
[26] SMISEK J,JANCOSEK M,PAJDLA T.3D with kinect[C]//2011 IEEE International Conference on Computer Vision Workshops(Conference Paper).Barcelona,Spain:IEEE,2011:1154-1160.
[27] HIRSCHMULLER H,SCHARSTEIN D.Evaluation of stereo matching costs on images with radiometric differences[J].IEEE transactions on pattern analysis and machine intelligence,2009,31(9):1582-1599.
[28] 黃林超.基于雙目立體視覺的三維重建技術研究[D].廣州:華南理工大學,2019.
[29] WHEATSTONE C.Contributions to the physiology of vision.Part the first.On some remarkable,and hitherto unobserved,phenomena of binocular vision[J].Philosophical transactions of the royal society of London,2009,128:371-394.
[30] SHIPLEY T.The first random-dot texture stereogram[J].Vision research,1971,11(12):1491-1492.
[31] JULESZ B,MILLER J E.Automatic stereoscopic presentation of functions of two variables[J].Bell system technical journal,1962,41(2):663-676.
[32] WRIGHT W D.Foundations of cyclopean perception[J].Journal of modern optics,1972,19(6):550.
[33] JULESZ B.Towards the automation of binocular depth perception[J].Communications of the ACM,1962,5(6):439-444.
[34] ZHI Q,COOPERSTOCK J R.Toward dynamic image mosaic generation with robustness to parallax[J].
IEEE transactions on image processing,2012,21(1):366-378.
[35] MARR D,NISHIHARA H K.Representation and recognition of the spatial organization of three-dimensional shapes[J].Proceedings of the royal society of london,1978,200(1140):269-294.
[36] GRIMSON W? W L.A computer implementation of a theory of human stereo vision[J].Philosophical transactions of the royal society B:Biological sciences,1981,292(1058):217-253.
[37] CAO H,WANG R W,WEN X B,et al.A novel recognition algorithm in 3D point clouds based for on local spherical harmonics[C]//2019 IEEE International Conference on Mechatronics and Automation(ICMA).Tianjin,China:IEEE,2019:1041-1046.
[38] ASADA M,TANAKA T,HOSODA K.Adaptive binocular visual servoing for independently moving target tracking[C]//Proceedings of the 2000 IEEE International Conference on Robotics & Automation.San Francisco,CA,USA:IEEE,2000.
[39] FANG Y,MASAKI I,HORN B.Depth-based target segmentation for intelligent vehicles:Fusion of radar and binocular stereo[J].IEEE transactions on intelligent transportation systems,2002,3(3):196-202.
[40] 魏菊錦.基于雙目視覺的三維重建方法研究[D].沈陽:沈陽工業大學,2016.
[41] 阮曉東,李世倫,諸葛良,等.用立體視覺測量多自由度機械裝置姿態的研究[J].中國機械工程,2000,11(5):571-573.
[42] 高慶吉,洪炳熔,阮玉峰.基于異構雙目視覺的全自主足球機器人導航[J].哈爾濱工業大學學報,2003,35(9):1029-1032,1088.
[43] 王保豐,周建亮,唐歌實,等.嫦娥三號巡視器視覺定位方法[J].中國科學:信息科學,2014,44(4):452-460.
[44] 劉妤,劉灑,楊長輝,等.基于雙目立體視覺的重疊柑橘空間定位[J].中國農業科技導報,2020,22(9):104-112.
[45] 王磊,李會容,周科,等.嵌入式ARM的果蔬采摘雙目視覺系統與算法設計[J].光電子·激光,2020,31(1):71-80.
[46] 周云成,許童羽,鄧寒冰,等.基于自監督學習的番茄植株圖像深度估計方法[J].農業工程學報,2019,35(24):173-182.
[47] JAFARI MALEKABADI A,KHOJASTEHPOUR M,EMADI B.Disparity map computation of tree using stereo vision system and effects of canopy shapes and foliage density[J].Computers and electronics in agriculture,2019,156:627-644.
[48] NUGROHO A P,FADILAH M A N,WIRATMOKO A,et al.Implementation of crop growth monitoring system based on depth perception using stereo camera in plant factory[J].IOP conference series earth and environmental science,2020,542(1):1-9.
[49] 殷悅,張慧春,鄭加強.基于雙目立體視覺的植物三維重建系統[J].中國農機化學報,2021,42(3):129-135.
[50] 楊鵬樹,劉卉,王曉翠,等.基于雙目視覺的作物苗期障礙物三維信息檢測方法[J].農機化研究,2021,43(4):11-16.
[51] ZOYMAK1 B.Determination of plant height for crop and weed discrimination by using stereo vision system[J].Journal of tekirdag agricultural faculty,2020,17(1):97-107.
[52] BAO Y,TANG L,BREITZMAN M W,et al.Field-based robotic phenotyping of sorghum plant architecture using stereo vision[J].Journal of field robotics,2019,36(2):397-415.
[53] CUEVAS-VELASQUEZ H,GALLEGO A J,FISHER R B.Segmentation and 3D reconstruction of rose plants from stereoscopic images[J].Computers and electronics in agriculture,2020,171:1-29.
[54] 殷小舟,淮永建,黃冬輝.基于雙目立體視覺的花卉三維重建[J].揚州大學學報(農業與生命科學版),2012,33(3):91-94.
[55] 賀磊盈,武傳宇,杜小強.基于雙輪廓同步跟蹤的果樹枝干提取及三維重建[J].農業工程學報,2014,30(7):182-189.
[56] DANDRIFOSSE S,BOUVRY A,LEEMANS V,et al.Imaging wheat canopy through stereo vision:Overcoming the challenges of the laboratory to field transition for morphological features extraction[J].Frontiers in plant science,2020,11:1-15.
[57] 王偉羊.基于計算機視覺的采茶機導航技術研究[D].杭州:浙江工業大學,2016.
[58] 鄭瓊娥,雷國銓.三產融合與茶產業轉型升級:問題、驅動力與路徑[J].學術交流,2019(5):114-123.
[59] 劉珈妮,劉少群,孫彬妹,等.茶產業科技扶貧模式與經驗淺析[J].福建茶葉,2020,42(6):115-116.
