海上中近程防空跨平臺目標(biāo)指示誤差研究
2021-01-07 10:53:16王犇,付林
艦船電子對抗 2020年6期
關(guān)鍵詞:跨平臺
王 犇,付 林
(中國船舶重工集團(tuán)公司第七二四研究所,江蘇 南京 211153)
0 引 言
反艦導(dǎo)彈是打擊水面艦艇的殺手锏武器,對水面艦艇構(gòu)成了重大威脅。特別是“飽和攻擊”戰(zhàn)術(shù)和“低空隱蔽突防”戰(zhàn)術(shù)在20世紀(jì)70年代和90年代被分別提出后,對海上目標(biāo)的打擊方式演變?yōu)樵陬A(yù)警機(jī)的指揮下,空襲飛機(jī)從艦艇防區(qū)外發(fā)射反艦導(dǎo)彈,采用航路規(guī)劃、遠(yuǎn)距離發(fā)射、低空突防和飽和攻擊的方式,穿透水面艦艇防御體系[1]。因此,反艦導(dǎo)彈技術(shù)的不斷進(jìn)步,已經(jīng)使得海上中近程防空作戰(zhàn)的主要對象從飛機(jī)轉(zhuǎn)變?yōu)楦黝惙磁瀸?dǎo)彈。
水面艦艇面對反艦導(dǎo)彈攻擊處于天然的劣勢,由于受地球曲率影響,艦載雷達(dá)對反艦導(dǎo)彈的探測距離無法超過視距,攔截縱深小,反應(yīng)時間短,使得反艦導(dǎo)彈的攔截十分困難。馬島戰(zhàn)爭中,阿根廷海軍用“飛魚”導(dǎo)彈擊沉英軍“謝菲爾德號”驅(qū)逐艦,兩伊戰(zhàn)爭期間伊拉克“飛魚”導(dǎo)彈誤傷美軍“斯塔克”號護(hù)衛(wèi)艦,反映了即使是代表世界先進(jìn)水平的海上軍事強(qiáng)國,水面艦艇在面對反艦導(dǎo)彈威脅時防御能力仍十分有限。為此,美國于20世紀(jì)70年代提出了協(xié)同交戰(zhàn)能力(CEC)[2],旨在通過高品質(zhì)網(wǎng)絡(luò),把多個海上與空中平臺的傳感器集成在一起,形成單一合成空中態(tài)勢(SIAP),支持跨平臺協(xié)同交戰(zhàn)。20世紀(jì)末美軍提出網(wǎng)絡(luò)中心戰(zhàn)的理念后,CEC成為美國海軍在網(wǎng)絡(luò)中心戰(zhàn)的重要實踐。隨后,美軍又在CEC基礎(chǔ)上發(fā)展了海軍一體化火控防空系統(tǒng)(NIFC-CA)[3],提出了海上、空中和陸上殺傷鏈的概念,將CEC編隊協(xié)同防空的概念擴(kuò)展到空中和陸上。
從美軍水面艦艇防空的發(fā)展歷程可以看到,采用網(wǎng)絡(luò)化手段構(gòu)建編隊協(xié)同防空體系,是解決水面艦艇應(yīng)對反艦導(dǎo)彈威脅的有效手段。本質(zhì)上,是將原來部署于單一平臺的“探、控、射、導(dǎo)”4個環(huán)節(jié)的資源與平臺解耦,在網(wǎng)絡(luò)化手段的支撐下,組織本平臺或遠(yuǎn)端的“探、控、射、導(dǎo)”資源,完成與空中目標(biāo)的交戰(zhàn)過程。
水面艦艇傳感器一般采用以本平臺為中心的參考坐標(biāo)系,傳感器誤差能夠滿足本平臺防空武器目標(biāo)指示要求。為了實現(xiàn)探測資源與平臺解耦,必然涉及本平臺和遠(yuǎn)端平臺的參考坐標(biāo)系轉(zhuǎn)換問題。本平臺傳感器誤差在遠(yuǎn)端平臺的參考坐標(biāo)系下,其概率分布會發(fā)生變化,同時平臺間相對定位還會引入額外的誤差,必須考察轉(zhuǎn)換后能否滿足遠(yuǎn)端平臺的防空武器目標(biāo)指示要求。因此,跨平臺目標(biāo)指示誤差分析是實現(xiàn)探測資源解耦、構(gòu)建網(wǎng)絡(luò)化協(xié)同防空體系必須解決的關(guān)鍵技術(shù)問題。
本文采用數(shù)值分析的方法,研究了GPS定位和相對定位2種條件下,海上中近程防空跨平臺目標(biāo)指示的誤差分布,并根據(jù)計算結(jié)果分析了編隊協(xié)同防空中跨平臺目標(biāo)指示誤差分布對編隊防空陣型的影響。
1 基本模型
按照“探、控、射、導(dǎo)”4個環(huán)節(jié),利用本平臺還是遠(yuǎn)端資源,網(wǎng)絡(luò)化協(xié)同防空可以分為多種不同模式,如提示交戰(zhàn)、遠(yuǎn)程發(fā)射、遠(yuǎn)程數(shù)據(jù)交戰(zhàn)、接力制導(dǎo)等。跨平臺目標(biāo)指示主要應(yīng)用于“探”與“射、導(dǎo)”分布于不同平臺的模式,即武器系統(tǒng)所在平臺利用其他平臺傳感器提供的目標(biāo)跟蹤信息,進(jìn)行火力解算和武器制導(dǎo)。
如圖1所示,平臺A和平臺B構(gòu)成目標(biāo)指示關(guān)系,平臺B為目指平臺,對來襲目標(biāo)進(jìn)行探測,并為平臺A提供目標(biāo)跟蹤信息。平臺A為武器平臺,平臺A的武器系統(tǒng)利用平臺B提供的目標(biāo)位置信息完成火力解算,并引導(dǎo)攔截武器對來襲目標(biāo)進(jìn)行攔截。
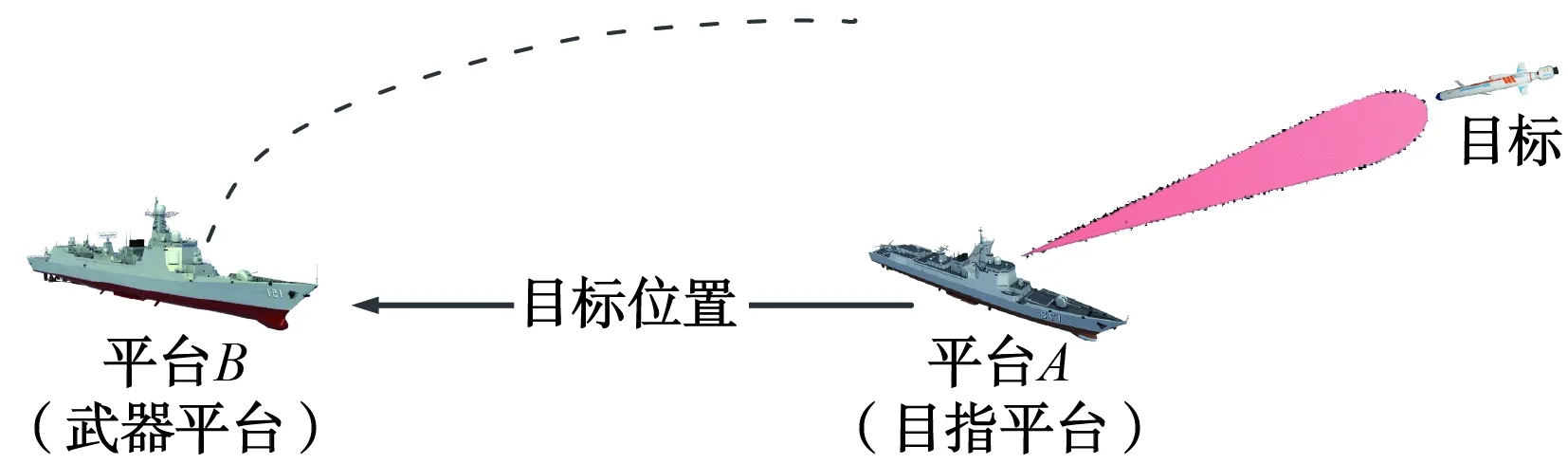
圖1 跨平臺目標(biāo)指示場景
以平臺A和平臺B傳感器天線所在位置為原點,分別建立ENU坐標(biāo)系,平臺A和平臺B的ENU坐標(biāo)系N軸指向正北(即正北指向角Aa和Ab為0),假設(shè)兩平臺導(dǎo)航系統(tǒng)正北方向的均方根誤差分別為ΔAa和ΔAb。目標(biāo)的極坐標(biāo)位置在平臺B的ENU坐標(biāo)系下表示為(rt,b,φt,b,θt,b),其中,rt,b、φt,b和θt,b分別為目標(biāo)的距離、方位和俯仰角,均方根誤差分別為(Δrt,b,Δφt,b,Δθt,b)。當(dāng)B平臺為A平臺提供目標(biāo)指示時,武器系統(tǒng)的輸入是目標(biāo)相對于A的ENU極坐標(biāo)(rt,a,φt,a,θt,a),因此需要求得跨平臺目指的目標(biāo)的均方根誤差(Δrt,a,Δφt,a,Δθt,a)。
1.1 平臺A和B采用GPS定位
若平臺A和B采用GPS定位,平臺的地理坐標(biāo)分別為(Ba,La,Ha)和(Bb,Lb,Hb),3個坐標(biāo)分別為平臺A和B的緯度、經(jīng)度和高度。平臺A和B的導(dǎo)航定位誤差(地球空間坐標(biāo))分別為(Δxa,Δya,Δza)和(Δxb,Δyb,Δzb),對應(yīng)的地理坐標(biāo)誤差分別為(ΔBa,ΔLa,ΔHa)和(ΔBb,ΔLb,ΔHb)。
則跨平臺目標(biāo)指示誤差的求解可以表述為:已知直接測量量(Ba,La,Ha)、(Bb,Lb,Hb)、(rt,b,φt,b,θt,b)、Aa和Ab,以及直接測量誤差(Δrt,b,Δφt,b,Δθt,b)、ΔAa、ΔAb、(ΔBa,ΔLa,ΔHa)和(ΔBb,ΔLb,ΔHb),求間接測量誤差(Δrt,a,Δφt,a,Δθt,a)。
1.2 平臺A和B采用相對定位
若平臺A和B采用相對定位,平臺B相對平臺A的位置為(rb,φb),誤差為(Δrb,Δφb)。
則跨平臺目標(biāo)指示誤差的求解可以表述為:已知直接測量量(rb,φb)、(rt,b,φt,b,θt,b)、Aa和Ab,以及直接測量誤差(Δrb,Δφb),(Δrt,b,Δφt,b,Δθt,b),ΔAa、ΔAb,求間接測量誤差(Δrt,a,Δφt,a,Δθt,a)。
2 誤差傳遞關(guān)系分析
2.1 基本思路
根據(jù)標(biāo)準(zhǔn)誤差傳遞公式,若直接測量量X=[x1,x2,…,xM]T的方差為ΔX=[Δx12,Δx22,…,ΔxM2]T,間接測量量Y=[y1,y2,…,yN]T的方差ΔY=[Δy12,Δy22,…,ΔyN2]T可通過以下方法求得:
ΔY=(M*M)ΔX
(1)
式中:*表示矩陣的哈達(dá)瑪積(基本積);M為X關(guān)于Y的雅克比矩陣,表示為:
(2)
由于從B平臺ENU極坐標(biāo)系變換到A平臺ENU極坐標(biāo)系需要經(jīng)過多次坐標(biāo)變換,因此,必須利用式(1)分析每一次坐標(biāo)轉(zhuǎn)換的誤差,并將上一次變換的間接測量量和誤差,作為下一次變換的直接測量量和誤差代入式(1)和(2)。
下面針對GPS定位和相對定位2種情況,分析跨平臺目指的誤差傳遞關(guān)系。
2.2 采用GPS定位時的跨平臺目標(biāo)指示誤差
采用GPS定位時的跨平臺目標(biāo)指示中,目指平臺B提供的是目標(biāo)相對于B的ENU極坐標(biāo)(rt,b,φt,b,θt,b),武器系統(tǒng)所需的是目標(biāo)相對于A的ENU極坐標(biāo)(rt,a,φt,a,θt,a)。從(rt,b,φt,b,θt,b)到(rt,a,φt,a,θt,a)共需要進(jìn)行4次變換,用F1、F2、F3、F4表示,過程如圖2。4次變換分別為:
F1:在ENU坐標(biāo)系下,將極坐標(biāo)轉(zhuǎn)換為直角坐標(biāo);
F2:將地理坐標(biāo)轉(zhuǎn)換為地球空間坐標(biāo);
F3:將B平臺ENU直角坐標(biāo)系轉(zhuǎn)換為A平臺ENU直角坐標(biāo)系;
F4:在ENU坐標(biāo)系下,將直角坐標(biāo)轉(zhuǎn)換為極坐標(biāo)。

圖2 采用GPS定位時的跨平臺目標(biāo)指示的坐標(biāo)轉(zhuǎn)換過程
在上述4次變換中,變換F3采用坐標(biāo)旋轉(zhuǎn)平移公式:
rt,a=Ta-1Tbrt,b+Ta-1(pb-pa)
(3)
(4)
式中:rt,a=[et,a,nt,a,ut,a]T;pa=[xa,ya,za]T;pb=[xb,yb,zb]T;σ3,out=[Δet,a,Δnt,a,Δut,a]T。
4次變換的誤差傳遞關(guān)系如表1所示。
2.3 采用相對定位時的跨平臺目標(biāo)指示誤差
采用相對定位時的跨平臺目標(biāo)指示中,從(rt,b,φt,b,θt,b)到(rt,a,φt,a,θt,a)共需要進(jìn)行4次變換,用F1、F2、F3、F4表示,過程如圖3所示。4次變換分別為:
F1:在平臺B的ENU坐標(biāo)系下,將極坐標(biāo)轉(zhuǎn)換為直角坐標(biāo);
F2:在平臺A的ENU坐標(biāo)系下,將平臺B的極坐標(biāo)轉(zhuǎn)換為直角坐標(biāo);
F3:將B平臺ENU直角坐標(biāo)系轉(zhuǎn)換為A平臺ENU直角坐標(biāo)系;

表1 采用GPS定位時的跨平臺目標(biāo)指示的誤差傳遞關(guān)系

圖3 采用相對定位時的跨平臺目指的坐標(biāo)變換過程
F4:在平臺A的ENU坐標(biāo)系下,將直角坐標(biāo)轉(zhuǎn)換為極坐標(biāo)。
與采用GPS定位時的跨平臺目標(biāo)指示相比,采用相對定位時變換的主要差異在于F3使用的變換公式不同,其他變換方法基本相同。
3 數(shù)值計算及結(jié)果
3.1 數(shù)值計算參數(shù)
由于誤差傳遞涉及的變量很多,若采用蒙特卡洛仿真方法,收斂極慢,且很難快速獲得穩(wěn)定的結(jié)果。因此考慮采用數(shù)值計算的方法進(jìn)行分析。數(shù)值計算需要按照式(2)推導(dǎo)每次變換雅克比矩陣的解析表達(dá)式,當(dāng)坐標(biāo)變換公式較為復(fù)雜時,解析表達(dá)式難以獲得。因此,本文考慮通過MATLAB符號計算推導(dǎo)每次變換的雅克比矩陣,然后再通過代入數(shù)值的方式,用數(shù)值計算求解每次變換的雅克比矩陣數(shù)值,進(jìn)而得到4次變換后的間接測量量誤差。
本文在數(shù)值計算結(jié)果分析時主要研究跨平臺目標(biāo)指示坐標(biāo)變換對方位誤差的影響,通過對不同條件下跨平臺目標(biāo)指示的方位角誤差進(jìn)行計算,繪制方位角誤差的等高線圖。
數(shù)值計算所采用的計算參數(shù)如表2所示。
3.2 數(shù)值計算結(jié)果及分析
以武器平臺為原點,以方位角誤差為等高線的高度軸,繪制的等高線圖如圖4所示。目指平臺位于武器平臺右側(cè)。若以武器平臺到目指平臺連線為基線方向,以基線方向左側(cè)為法線方向;跨平臺目標(biāo)指示使得方位角誤差沿基線方向下降,沿基線反方向上升。
若以0.3°作為武器系統(tǒng)對目標(biāo)指示方位角誤差的要求,則以0.3°等高線為界,大體可將圖中區(qū)域分為方位角誤差滿足防空武器要求區(qū)域和不滿足防空武器要求區(qū)域。數(shù)值計算結(jié)果顯示,目指平臺提供的目標(biāo)跟蹤信息經(jīng)坐標(biāo)變換后,無法保障防空武器全方位攔截。不滿足防空武器要求區(qū)域主要位于兩平臺之間區(qū)域和法線左側(cè)區(qū)域。

表2 數(shù)值計算參數(shù)
以武器平臺A為圓心繪制一組同心圓,表示跨平臺目標(biāo)指示下的目標(biāo)與武器平臺的距離,如圖5所示。每個圓與0.3°等高線存在交點,繪制交點到武器平臺的連線,該連線與基線方向的夾角α即為該距離下攔截武器的最大航路角。根據(jù)數(shù)值計算結(jié)果,最大航路角隨目標(biāo)與武器平臺間距離減小而減小。即目標(biāo)距離武器平臺越近時,滿足防空武器可攔截的方位就越窄。

圖5 跨平臺目標(biāo)指示的可攔截范圍
從以上分析可以看到,最大航路角是決定可攔截區(qū)域大小的關(guān)鍵指標(biāo),可將最大航路角作為考察跨平臺目標(biāo)可攔截區(qū)域大小的指標(biāo)。
本文對5 km,10 km、20 km和30 km 4種基線長度下的方位角誤差進(jìn)行了計算,若以0.3°作為武器系統(tǒng)對目標(biāo)指示方位角誤差的要求,則不同基線長度、不同目標(biāo)距離的條件下,最大航路角的變化如表3所示。數(shù)值計算結(jié)果顯示,無論是采用GPS定位還是采用相對定位,都有以下結(jié)論:
橫向比對表格中不同目標(biāo)距離下的最大航路角,可以看到,目標(biāo)距離越小,最大航路角對基線長度變化越敏感。例如:采用GPS定位,目標(biāo)距離為15 km時,最大航路角從119.1°縮小到25.2°;目標(biāo)距離為20 km時,最大航路角從140.9°縮小到87.1°。也就是說,末端近距離防空武器不適合采用跨平臺目標(biāo)指示信息。
縱向比對表格中不同基線長度下的最大航路角,可以看到,拉長基線長度,會使最大航路角縮小。同樣的目標(biāo)距離下,長基線跨平臺目標(biāo)指示的最大航路角更小,因此采用長基線跨平臺目標(biāo)指示時,為保證最大航路角足夠大,目標(biāo)距離武器平臺應(yīng)盡可能遠(yuǎn),這就要求防空武器能夠提供足夠大的攔截距離。也就是說,基線長度越大,對防控武器射程要求越高。
當(dāng)目標(biāo)距離遠(yuǎn)大于基線長度時,武器系統(tǒng)有可能實現(xiàn)全向攔截,例如基線長度5 km,目標(biāo)距離30 km時,最大攔截方位角為180°,即實現(xiàn)了全向攔截。實際上這種場景可以近似看作武器和傳感器位于同一平臺。

表3 不同基線長度下的最大航路角
4 對編隊防空陣型的影響分析
4.1 跨平臺目標(biāo)指示精度對防御縱深的影響
通過面向威脅軸方向部署前出的目指平臺,可以擴(kuò)展防空武器攔截的防御縱深,如圖6所示,MN為2個平臺傳感器覆蓋范圍的交點。當(dāng)目標(biāo)位于目指平臺傳感器覆蓋范圍,而尚未進(jìn)入武器平臺傳感器覆蓋范圍時,通過跨平臺目標(biāo)指示,使得武器平臺防空武器可以超視距攔截來襲目標(biāo)。目標(biāo)進(jìn)入武器平臺傳感器覆蓋范圍后,武器平臺利用本平臺傳感器信息引導(dǎo)武器打擊。
由于跨平臺目標(biāo)指示的坐標(biāo)變換使得誤差的空間分布發(fā)生改變,目指平臺傳感器探測到的目標(biāo)并不一定能用于跨平臺引導(dǎo)防空武器。根據(jù)數(shù)值分析結(jié)果,只有目標(biāo)到武器平臺的連線與基線的夾角α小于最小航向角,才能保證經(jīng)過坐標(biāo)變換誤差能夠滿足防空武器的要求。實際跨平臺目標(biāo)指示的覆蓋范圍如圖6所示,要在目指平臺傳感器覆蓋范圍基礎(chǔ)上,截去夾角α大于最大航路角的部分和兩平臺共視區(qū)的部分。
通過縮短基線長度,可以增大最小航向角,當(dāng)最大航路角大于圖6中的∠MBA時,目指平臺傳感器覆蓋范圍內(nèi)的所有目標(biāo),經(jīng)過坐標(biāo)變換后誤差都能夠滿足引導(dǎo)防空武器的要求。但是,這樣做也犧牲了防御縱深。因此,基線長度的選擇實際上是在防御縱深和防御角度之間的折衷。

圖6 利用跨平臺目標(biāo)指示擴(kuò)展防御縱深
4.2 跨平臺目標(biāo)指示精度對抗飽和攻擊的影響
在兩平臺共視區(qū)內(nèi),可以通過傳感器資源的協(xié)同調(diào)度,增加精跟目標(biāo)的數(shù)量,提升抗飽和攻擊能力。如圖7所示,由于只有目標(biāo)到武器平臺的連線與基線的夾角α小于最大航路角,才能保證經(jīng)過坐標(biāo)變換誤差能夠滿足防空武器的要求。因此,實際能夠?qū)崿F(xiàn)多重覆蓋的區(qū)域是在共視區(qū)的基礎(chǔ)上,截去夾角α大于最大航路角的部分。
若縮短基線長度,使最小航向角大于90°時,共視區(qū)域內(nèi)的所有目標(biāo),經(jīng)過跨平臺坐標(biāo)變換后誤差都能夠滿足引導(dǎo)防空武器的要求。
抗飽和攻擊中,目標(biāo)位于武器平臺傳感器探測范圍內(nèi),與擴(kuò)展防御縱深相比,目標(biāo)距離武器平臺更近,為了保證最大航路角不至于過窄,需要更短的基線長度。但是短基線不適合擴(kuò)展防御縱深。因此,通過跨平臺目指擴(kuò)展防御縱深與抗飽和攻擊相互矛盾,經(jīng)坐標(biāo)變換后的目標(biāo)指示誤差可能會使二者無法兼得。

圖7 利用跨平臺目標(biāo)指示提升抗飽和攻擊能力
5 結(jié)束語
本文主要對中近程防空中的跨平臺目標(biāo)指示誤差進(jìn)行分析,采用數(shù)值分析的方法,研究了GPS定位和相對定位2種條件下,海上中近程防空跨平臺目標(biāo)指示的誤差分布,并根據(jù)計算結(jié)果,分析編隊協(xié)同防空中跨平臺目標(biāo)指示誤差分布對編隊防空陣型的影響。數(shù)值分析結(jié)果顯示,跨平臺目標(biāo)指示使得方位角誤差沿基線方向下降,沿基線反方向上升。目指平臺提供的目標(biāo)跟蹤信息經(jīng)坐標(biāo)變換后,無法保障防空武器全方位攔截。最大航路角隨目標(biāo)與武器平臺間距離減小而減小。即目標(biāo)距離武器平臺越近時,滿足防空武器可攔截的方位就越窄。通過跨平臺目標(biāo)指示擴(kuò)展防御縱深,基線長度的選擇實際上是在防御縱深和防御角度之間的折衷。通過跨平臺目指擴(kuò)展防御縱深與抗飽和攻擊相互矛盾,經(jīng)坐標(biāo)變換后的目標(biāo)指示誤差可能會使二者無法兼得。
猜你喜歡
軍民兩用技術(shù)與產(chǎn)品(2022年5期)2022-06-28 02:15:24
電腦報(2021年11期)2021-07-01 08:10:05
通信產(chǎn)業(yè)報(2020年31期)2020-09-10 01:27:00
測控技術(shù)(2018年9期)2018-11-25 07:44:58
數(shù)碼世界(2017年12期)2017-12-28 15:45:13
電子技術(shù)與軟件工程(2017年8期)2017-05-10 17:43:26
環(huán)球市場信息導(dǎo)報(2016年29期)2016-11-18 11:56:53
智能計算機(jī)與應(yīng)用(2016年2期)2016-05-03 02:46:06
電測與儀表(2015年21期)2015-04-09 11:52:08
電機(jī)與控制應(yīng)用(2015年1期)2015-03-01 03:49:19