基于四旋翼無(wú)人機(jī)的搜尋與探測(cè)系統(tǒng)設(shè)計(jì)
2021-01-07 10:54:50王慶豐
艦船電子對(duì)抗 2020年6期
關(guān)鍵詞:系統(tǒng)設(shè)計(jì)
徐 光,葉 明,王慶豐,于 燁
(1.海裝駐上海地區(qū)第十軍事代表室,上海 201800;2.上海微波設(shè)備研究所,上海 201802;3.中國(guó)科學(xué)院微電子研究所,北京 100029;4.中國(guó)科學(xué)院大學(xué)微電子學(xué)院,北京 100049)
0 引 言
隨著科學(xué)技術(shù)的飛速發(fā)展,無(wú)人機(jī)的應(yīng)用領(lǐng)域越來(lái)越廣泛。近年來(lái),由于這項(xiàng)技術(shù)的日臻完善,使其在社會(huì)的諸多領(lǐng)域發(fā)揮著重要的作用。無(wú)人機(jī)具有操作簡(jiǎn)單,方便靈活,體積小巧,功能多樣,成本較低,野外生存率高等優(yōu)點(diǎn),在野外搜救、高空航拍、勘探測(cè)繪、氣象探測(cè)、森林防火巡視等諸多領(lǐng)域得到了廣泛的應(yīng)用[1]。在當(dāng)今國(guó)際社會(huì),無(wú)人機(jī)技術(shù)的發(fā)展象征著國(guó)家科學(xué)技術(shù)的進(jìn)步,并且無(wú)人機(jī)的發(fā)展促進(jìn)了社會(huì)生產(chǎn)力的提高,因此近幾年無(wú)人機(jī)技術(shù)的發(fā)展得到了國(guó)家的高度重視。基于此,本文設(shè)計(jì)了一款適用于野外搜尋與探測(cè)的無(wú)人機(jī)飛行系統(tǒng)。該款四旋翼飛行器具有環(huán)境適應(yīng)能力強(qiáng)、穩(wěn)定性高和易于控制等優(yōu)勢(shì)。
1 系統(tǒng)總體設(shè)計(jì)方案
該系統(tǒng)使用STM 32作為核心處理器,該處理器基于ARM Cortex-M3內(nèi)核架構(gòu),具有低成本、低功耗和高性能的優(yōu)勢(shì)。系統(tǒng)通過(guò)移植UCOS-III實(shí)時(shí)操作系統(tǒng),提高了運(yùn)行效率及實(shí)時(shí)處理能力[2-4]。
硬件電路上,系統(tǒng)由飛行系統(tǒng)、遠(yuǎn)程控制系統(tǒng)兩部分構(gòu)成。
飛行系統(tǒng)的外圍硬件電路主要包括陀螺儀MPU6050、氣壓傳感器MS 5611、無(wú)線(xiàn)通信模塊、GPS模塊、液晶OLED模塊、攝像頭模塊、超聲波避障模塊、電子調(diào)速器和電源電路等。陀螺儀MPU6050用于反饋飛行器的姿態(tài)角位置信息,氣壓傳感器MS5611用于檢測(cè)飛行器所處高度的氣壓值, 2.4 GHz無(wú)線(xiàn)模塊用于控制飛行器的穩(wěn)定飛行, 5.8 GHz無(wú)線(xiàn)模塊用于實(shí)現(xiàn)圖像數(shù)據(jù)的實(shí)時(shí)傳輸, GPS模塊用于獲得實(shí)時(shí)定位信息及一鍵返航功能,攝像頭模塊和液晶OLED模塊用于將飛行器捕捉的畫(huà)面信息顯示給地面控制, 現(xiàn)場(chǎng)可編程門(mén)陣列(FPGA)芯片用于實(shí)現(xiàn)圖像壓縮編碼算法,超聲波模塊用于進(jìn)行實(shí)時(shí)避障,電子調(diào)速器用于實(shí)現(xiàn)飛行器變速功能,電源電路用于提供模塊所需的電源電壓。其中,主控芯片STM 32與FPGA、GPS連接,均采用串行接口的連接方式;傳感器與控制芯片的連接,采用集成電路(IIC)總線(xiàn)接口的連接方式;STM 32與電子調(diào)速器之間傳遞脈沖寬度調(diào)制(PWM)控制信號(hào)。飛行系統(tǒng)結(jié)構(gòu)如圖1所示。遠(yuǎn)程控制系統(tǒng)的外圍硬件電路包括2.4 GHz無(wú)線(xiàn)接收模塊、5.8 GHz無(wú)線(xiàn)發(fā)送模塊、下位機(jī)電路和下位機(jī)與上位機(jī)的接口電路等,遠(yuǎn)程控制系統(tǒng)結(jié)構(gòu)如圖2所示。通過(guò)系統(tǒng)之間組合,實(shí)現(xiàn)定點(diǎn)、定高飛行及全自動(dòng)探測(cè)功能。

圖1 飛行系統(tǒng)結(jié)構(gòu)框圖

圖2 遠(yuǎn)程控制系統(tǒng)結(jié)構(gòu)框圖
在軟件及算法實(shí)現(xiàn)上,該系統(tǒng)采用四元數(shù)加互補(bǔ)濾波器作為姿態(tài)解算算法[5],采用經(jīng)典的比例積分微分(PID)控制器控制舵機(jī)和無(wú)刷電機(jī)[6],采用MPEG-4圖像壓縮編碼算法,使用C++設(shè)計(jì)并且實(shí)現(xiàn)了用于控制及數(shù)據(jù)采集的上位機(jī)程序,方便系統(tǒng)調(diào)整參數(shù)及數(shù)據(jù)整合。
2 系統(tǒng)硬件設(shè)計(jì)
2.1 電源電路設(shè)計(jì)
由于飛行器的設(shè)計(jì)要求,本系統(tǒng)需要控制其整體重量。因此,在電池選取上,優(yōu)先考慮體積小、重量輕,容量較大的鋰電池。系統(tǒng)的控制芯片為STM32,其所需的供電電壓為3.3 V,同時(shí)傳感器MPU 6050、MS 5611均采用3.3 V電壓供電,F(xiàn)PGA為ALTERA公司生產(chǎn)的Cyclone IV系列芯片EP4CE6E22C8,它需要3.3 V、2.5 V、1.2 V 3種供電電壓。其他模塊,如GPS模塊、OLED模塊等均使用5 V電壓供電。
電池使用25C 5 000 m Ah的4 S鋰電池,電池供電電壓為14.8 V。因此,為了系統(tǒng)各模塊的正常工作,本系統(tǒng)將鋰電池的電壓調(diào)到各模塊工作的正常電壓范圍內(nèi)。通過(guò)綜合考慮本系統(tǒng)多電平的供電要求及系統(tǒng)設(shè)計(jì)的便利性,該系統(tǒng)的電源電路采用LM1117-1.2、LM1117-2.5、LM1117-3.3和LM2940-5等4種穩(wěn)壓芯片。鋰電池電壓經(jīng)過(guò)LM2940-5芯片降到5 V后,再分別使用LM1117-1.2、LM1117-2.5、LM1117-3.3等芯片將5 V電壓降為1.2 V、2.5 V和3.3 V。
2.2 主控模塊電路設(shè)計(jì)
飛行器的核心是主控模塊,它應(yīng)能采集多路模擬信號(hào),輸出PWM脈沖控制信號(hào),并具有脈位調(diào)制(PPM)信號(hào)捕獲解碼的能力。另外,它還應(yīng)具有FPGA的交互接口、傳感器數(shù)據(jù)的傳輸接口和多個(gè)通信的信道接口。因此,綜合各方面因素考慮,采用STM 32作為控制的核心芯片,該芯片功耗低,穩(wěn)定性好,運(yùn)算處理能力強(qiáng),并且具有多種接口標(biāo)準(zhǔn),完全符合本系統(tǒng)設(shè)計(jì)的要求。
2.3 圖像處理模塊電路設(shè)計(jì)
在視頻傳輸系統(tǒng)中,最大的障礙是大數(shù)據(jù)量的處理,一般單片機(jī)處理速度達(dá)不到這么高的要求,因此對(duì)芯片的處理能力提出了更高的要求。綜合各方面的考慮,本系統(tǒng)使用ALTERA公司生產(chǎn)的Cyclone IV系列芯片EP4CE6E22C8,該款芯片性?xún)r(jià)比高,以硬件實(shí)現(xiàn)壓縮編碼算法,完全能夠滿(mǎn)足本系統(tǒng)的設(shè)計(jì)要求。攝像頭采用ALIENTEK生產(chǎn)的一款200 W高清攝像頭模塊,數(shù)字?jǐn)z像頭采集的數(shù)據(jù)為 8-bit RAW格式的原始數(shù)據(jù)。
2.4 數(shù)據(jù)采集模塊電路設(shè)計(jì)
飛行器通過(guò)陀螺儀MPU 6050獲取姿態(tài)角數(shù)據(jù),為了提高數(shù)據(jù)的可靠性,本系統(tǒng)使用俯仰角與橫滾角同時(shí)作為姿態(tài)反饋,形成一個(gè)閉環(huán)控制回路[7-9]。為了提高它的穩(wěn)定性,系統(tǒng)加入角速率反饋來(lái)增加系統(tǒng)阻尼[10]。采用氣壓傳感器MS 5611實(shí)現(xiàn)飛行器的定高功能,采用超聲波模塊完成實(shí)時(shí)避障,遇障礙物報(bào)警。飛行器的精確位置信息可以通過(guò)GPS模塊獲取。
2.5 執(zhí)行機(jī)構(gòu)驅(qū)動(dòng)模塊
在傾斜狀態(tài)下,飛行器需要在最短時(shí)間內(nèi)回到平衡狀態(tài),這對(duì)執(zhí)行機(jī)構(gòu)的反應(yīng)速度要求比較高。針對(duì)本系統(tǒng)的研究,采用電子調(diào)速器控制無(wú)刷電機(jī)的運(yùn)轉(zhuǎn),本系統(tǒng)使用的電子調(diào)速器模塊采用的是PWM信號(hào),它的周期時(shí)長(zhǎng)為20 ms。
3 系統(tǒng)軟件設(shè)計(jì)
3.1 軟件設(shè)計(jì)流程
本系統(tǒng)的軟件部分采用C語(yǔ)言編寫(xiě),完成了硬件平臺(tái)的初始化狀態(tài)。通過(guò)數(shù)據(jù)采集和信號(hào)解碼,更好地實(shí)現(xiàn)了姿態(tài)角的解算。主程序的流程如圖3所示。

圖3 主程序流程圖
在解算姿態(tài)角時(shí),本系統(tǒng)將其融合遙控信息后,進(jìn)行完整的解算和分析,以完成飛行器的控制。
3.2 控制算法設(shè)計(jì)
在控制器方面,系統(tǒng)選擇PID控制器。PID控制器的參數(shù)是可調(diào)節(jié)的[11],對(duì)于所使用的對(duì)象沒(méi)有局限性,因此可以高效精確地分析模型。通過(guò)PID控制器可以較好地整合比例、微分和積分三個(gè)方面的參數(shù)設(shè)定,以達(dá)到最佳控制效果。PID控制表達(dá)式如下:
(1)
式中:kp為比例增益;Ti為時(shí)間積分常數(shù);Td為時(shí)間微分常數(shù);u(t)為輸出變量;e(t)為偏差數(shù)量。
在姿態(tài)角的控制上,系統(tǒng)將遙控器信號(hào)轉(zhuǎn)換成1個(gè)角度,并與解算出的測(cè)量角進(jìn)行作差計(jì)算,得到偏差,最后將偏差乘以1個(gè)比例系數(shù)。由于任何一個(gè)系統(tǒng)都不可能非常精確,都會(huì)有一定的誤差,所以利用積分減少穩(wěn)態(tài)誤差。為了解決設(shè)定值不規(guī)則變化可能給系統(tǒng)帶來(lái)的不良影響,系統(tǒng)在姿態(tài)角計(jì)算上引入了PID算法,通過(guò)對(duì)陀螺儀角速度進(jìn)行微分處理,而不是對(duì)設(shè)定值進(jìn)行微分處理。因此,在設(shè)定值發(fā)生變化時(shí),輸出量也不會(huì)發(fā)生改變,極大程度地改善了其性能。姿態(tài)控制系統(tǒng)如圖4所示。
設(shè)定3個(gè)控制量,分別為俯仰、橫滾和航向,并將其分別輸入到PID控制器中,則會(huì)得到3個(gè)輸出:pid_roll,pid_pitch,pid_yaw。
通過(guò)線(xiàn)性運(yùn)算,部分代碼如下:
#define PIDMIX (X,Y,Z) Motor_Thr + pid_pitch* Y+ pid_roll*X + pid_yaw*Z
MOTOR1=MOTORLimit(PIDMIX(+1,+1,-1));//REAR_R 后右電機(jī)
MOTOR2=MOTORLimit(PIDMIX(-1,-1,-1));//FRONT_R 前右電機(jī)
MOTOR3=MOTORLimit(PIDMIX(-1,+1,+1));//REAR_L 后左電機(jī)
MOTOR4=MOTORLimit(PIDMIX(+1,-1,+1));//FRONT_L 前左電機(jī)

圖4 姿態(tài)控制系統(tǒng)框圖
3.3 圖像壓縮算法設(shè)計(jì)
本系統(tǒng)在圖像壓縮算法上,根據(jù)設(shè)計(jì)需求,采用經(jīng)典的MPEG-4圖像壓縮算法實(shí)現(xiàn)[12]。同時(shí)在圖像壓縮算法上,既要對(duì)外圍的硬件電路進(jìn)行設(shè)計(jì),也要完成相關(guān)軟件的設(shè)計(jì)。圖5為基于FPGA的MPEG-4編碼系統(tǒng)框圖。

圖5 基于FPGA的MPEG-4編碼系統(tǒng)框圖
傳統(tǒng)的解決方案是通過(guò)提高處理器的時(shí)鐘頻率,但隨著時(shí)鐘頻率的提高,系統(tǒng)功耗也會(huì)相對(duì)增大,因此傳統(tǒng)方法很難達(dá)到對(duì)圖像處理的要求。所以,為了降低功耗,提高壓縮效率,在視頻壓縮算法中引入流水線(xiàn)處理的思想,將一系列的視頻壓縮算法分割成不同模塊,每個(gè)模塊的操作都獨(dú)占一個(gè)處理單元,并與其他模塊在計(jì)算時(shí)間上互不相干,這是一種時(shí)間并行的處理思想。在視頻壓縮算法中,同樣引入圖像分割的概念,分割后的數(shù)據(jù)會(huì)及時(shí)分配給一個(gè)處理單元,可以避免算法中像素點(diǎn)重復(fù)運(yùn)算和多像素相同運(yùn)算的問(wèn)題。
4 系統(tǒng)調(diào)試
4.1 姿態(tài)角調(diào)試
本系統(tǒng)采用串口傳輸協(xié)議將解算出的數(shù)據(jù)傳輸?shù)缴衔粰C(jī)進(jìn)行姿態(tài)角的調(diào)試,通過(guò)四軸機(jī)體的搖動(dòng),可以得到如圖6所示的上位機(jī)數(shù)據(jù)曲線(xiàn)與姿態(tài)示意圖。
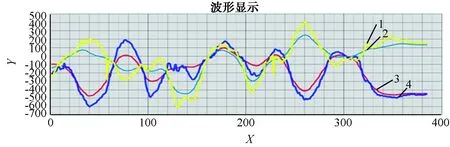
圖6 上位機(jī)數(shù)據(jù)曲線(xiàn)與姿態(tài)演示圖
在圖6中,曲線(xiàn)1代表俯仰,2代表橫滾角,3和4為姿態(tài)解算前后的姿態(tài)角。通過(guò)圖中曲線(xiàn)可以看出直接由加速度計(jì)算出的姿態(tài)角并不能真實(shí)反映變化情況。但是,由四元數(shù)算法解算后的姿態(tài)角反應(yīng)較快,噪聲較小。
4.2 PID參數(shù)調(diào)節(jié)
PID的參數(shù)調(diào)節(jié)直接影響到該系統(tǒng)的控制效果。在該系統(tǒng)中采用湊試法進(jìn)行PID參數(shù)設(shè)定。湊試法是一種通過(guò)實(shí)際閉環(huán)系統(tǒng)觀察系統(tǒng)響應(yīng)曲線(xiàn)的方法。在本系統(tǒng)中,通過(guò)觀察被調(diào)量、PID輸出、設(shè)定值3條曲線(xiàn),判斷出kp、ki、kd對(duì)系統(tǒng)響應(yīng)的影響,反復(fù)調(diào)試,最終達(dá)到滿(mǎn)意響應(yīng),從而達(dá)到確定控制參數(shù)的kp、ki、kd的目的。在參數(shù)調(diào)節(jié)過(guò)程中遵循以下原則:
(1) 在輸出不振蕩時(shí),增大比例增益P。
(2) 在輸出不振蕩時(shí),減小積分時(shí)間常數(shù)Ti。
(3) 在輸出不振蕩時(shí),增大微分時(shí)間常數(shù)Td。
(4) 一般步驟如下:
Step 1:確定比例增益P;
Step 2:確定積分時(shí)間常數(shù)Ti;
Step 3:確定微分時(shí)間常數(shù)Td;
Step 4:系統(tǒng)空載、帶載聯(lián)調(diào),再對(duì)PID參數(shù)進(jìn)行微調(diào)處理,直至滿(mǎn)足我們的要求。
(5) 最終調(diào)試好的結(jié)果是有一個(gè)階躍響應(yīng),響應(yīng)由一大一小2個(gè)波組成,小波是大波的四分之一。
具體操作如下:
首先,將四軸固定在平衡臺(tái)上,讓飛行器獨(dú)立完成單軸平衡,觀察姿態(tài)角的穩(wěn)定性、響應(yīng)性和操縱性。然后,在調(diào)整參數(shù)時(shí),應(yīng)先調(diào)P,然后將I、D設(shè)定為0。先給P賦一個(gè)小值P1,如果飛行器不能夠穩(wěn)定下來(lái),則說(shuō)明P1太小了。然后接著賦值一個(gè)較大的數(shù)P2,如果飛行器產(chǎn)生震蕩,則說(shuō)明P2增大了。經(jīng)過(guò)反復(fù)試驗(yàn),可以找到P震蕩的臨界點(diǎn)P0。最后,保持P0不變,按照上述調(diào)節(jié)P的方法來(lái)調(diào)節(jié)D。當(dāng)找到合適的P0、D0后,再加入I,參數(shù)從小到大,當(dāng)誤差較小時(shí),我們?cè)賹?duì)P、I、D3組參數(shù)在小范圍內(nèi)微調(diào),從而完成整個(gè)PID參數(shù)的設(shè)定,得到PID的參數(shù)值,如表1所示。

表1 PID參數(shù)調(diào)節(jié)
5 結(jié)束語(yǔ)
本文設(shè)計(jì)了一款適用于野外搜尋與探測(cè)的無(wú)人機(jī)飛行系統(tǒng)。該飛行系統(tǒng)通過(guò)2.4 GHz遙控器控制飛行器遠(yuǎn)距離飛行,飛行器的飛行比較穩(wěn)定,實(shí)現(xiàn)了遠(yuǎn)距離的搜尋與探測(cè)功能,而且飛行器有報(bào)警、障礙物躲避及氣壓計(jì)定高等功能,通過(guò)自動(dòng)增穩(wěn)算法調(diào)節(jié)飛行器的運(yùn)動(dòng)參數(shù),極大地提高了飛行器的安全性和穩(wěn)定性,使其能夠適應(yīng)極其惡劣的環(huán)境。在遇到緊急情況時(shí),通過(guò)GPS實(shí)現(xiàn)飛行器定位功能,使用路徑搜索算法,實(shí)現(xiàn)了GPS一鍵返航功能,防止飛行器在野外墜落和丟失。此外,該飛行系統(tǒng)圖像遠(yuǎn)距離傳輸效果比較好,抗干擾能力強(qiáng)。即使在惡劣的環(huán)境也不會(huì)影響視頻傳輸?shù)馁|(zhì)量。圖像傳輸系統(tǒng)帶有兩軸云臺(tái),實(shí)現(xiàn)了2個(gè)方向的多角度探測(cè)功能,并且云臺(tái)自帶增穩(wěn)功能,極大地消除了攝像頭機(jī)械抖動(dòng)對(duì)視頻圖像質(zhì)量的影響。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17