Adams仿真的柑橘采摘末端執行器設計
2021-01-11 12:40:38秦雪靜王海寶張益維
湖北農機化 2020年21期
秦雪靜 羅 強 王海寶 張益維 鄭 巖
(重慶三峽學院機械工程學院,重慶 萬州 404100)
0 引言
柑橘是我國種植面積較大的一種水果,重慶萬州2018年全區柑橘種植面積已達2.4萬hm2。目前,重慶市柑橘的采摘作業基本上采用手工采摘方式,采摘約占整個生產過程一半的作業量,費用占成本的比例較高。近年來,社會老齡化問題日趨嚴重,工業的快速發展使農業勞動力逐步向其他行業轉移,農業行業的從業人員逐漸減少。柑橘采摘末端執行器的研究,能有效提高采摘效率,減少使用農業方面的勞動力。在研究過程中,通過使用SolidWorks和Adams仿真軟件可以大大降低產品的設計周期,降低產品的生產成本。
1 柑橘采摘結構設計原理
1.1 末端執行器的結構設計與建立
柑橘采摘末端執行器的結構包括剪切機構和吸附機構2個部分,吸附機構通過氣缸伸縮使吸盤上下移動,通過海綿吸盤來吸附果實。柑橘采摘末端執行器中,剪切機構是關鍵機構。剪切機構通過平行四邊形結構的原理,通過使用鉸鏈結構將平行四邊形的四個邊連接起來,通過推拉其中一個邊使剪切機構剪切果梗,原理見圖1。
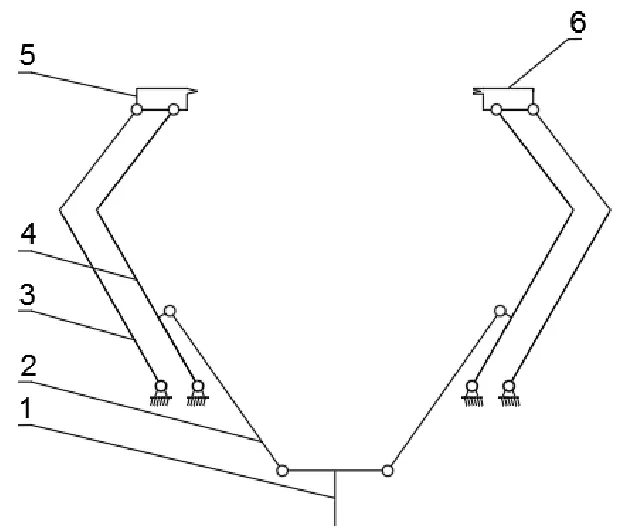
1.拉桿;2.連接桿;3.平行四邊形連桿一;4.平行四邊形連桿二;5.刀片;6.刀槽
剪切機構通過驅動拉桿,使拉桿向下運動,帶動連接桿轉動,連接桿帶動平行四邊形連桿二繞鉸鏈旋轉,帶動刀片和刀槽平行向中心運動,將果梗切斷。通過此原理,設計柑橘采摘末端執行器的剪切結構,再通過調研重慶柑橘果實的大小設計整體的結構,使用吸盤作為吸附果實的結構,通過使用直線氣缸來使吸盤上下移動和使用直線氣缸作為剪切機構的動力來源。在SolidWorks完成了對柑橘采摘末端執行器的設計,如圖2所示。

1.氣缸一;2.缸活塞一;3.連接架;4.推拉旋轉連接桿;5.旋轉連接桿一;6.旋轉連接桿二;7.刀槽;8.攬枝桿一;9.攬枝桿二;10.刀片;11.刀具固定架;12.海綿吸盤;13.吸盤支架;14.氣缸吸盤連接件;15.氣缸活塞二;16.氣缸二;17.固定盤
柑橘采摘末端執行器的工作流程:首先通過氣缸二帶動吸盤向上直線運動一定的距離,吸盤通過負壓吸附果實,再通過氣缸二向下運動一定的距離,啟動氣缸一向下運動,拉動剪切機構剪切果梗,果梗剪切之后,氣缸一再推動剪切機構打開,等待下一次吸盤吸附果實。
2 柑橘采摘末端執行器的運動學仿真
將已經設計出來的模型導入Adams運動仿真軟件中,通過Adams軟件來分析此模型刀片運動的軌跡、刀片的速度和加速度的運動曲線。
首先,設置好重力加速度,將模型材料設置為steel,在Adams能看到材料的密度、楊氏模量和泊松比。將導入的模型根據柑橘采摘末端執行器的實際運動狀態,給定約束條件,連接架和推拉旋轉連接桿之間為鉸鏈約束,在連接方式中選擇旋轉副,對于其它同樣使用鉸鏈連接的部分,連接方式選擇創建旋轉副。對氣缸活塞部分由于它是在做直線運動,所以創建一個移動副。然后在設置好的旋轉副中添加摩擦力,氣缸活塞部分創建一個單向作用力,作用力大小根據選型選擇的雙桿氣缸在空氣壓力為0.5MPa時產生的空氣壓力將力設置為150N。
如圖3所示,紅色部分為刀具固定架一,刀片固定在刀具固定架一內,綠色部分為刀片,橘色部分為刀片固定架二,刀片固定架二與刀槽為一個整體。由于刀具固定架一和刀片為固定連接,它們的運動軌跡、速度和加速度一致,就以刀具固定架一來分析刀片的運動曲線。刀具固定架一和刀具固定架二在相對運動前相對的表面相距為142mm。
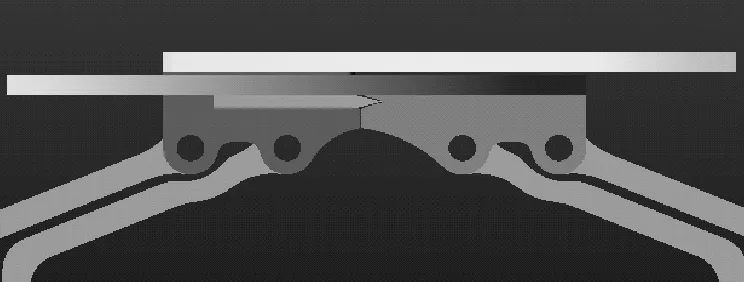
圖3 剪切機構部分圖片
仿真后,得到仿真結果如圖4和圖5所示。

圖4 刀具固定架一和刀具固定架二在X和Y方向的位移

圖5 刀具固定架一和刀具固定架二的速度曲線
由于兩側對稱,從圖4中得知,刀具固定架一和刀具固定架二在Y軸方向上位移較小,控制在10mm以內,在X軸方向刀具固定架一和刀具固定架二在同一平行線上,逐漸靠近并相切。
在圖5中,給定氣缸的拉力為150N,刀片的速度在剪切機構運動過程中在逐漸增大,是一條平滑的曲線。從圖5中還能得知,加速度隨著剪切機構的運動而逐漸變大。
通過Adams仿真,我們簡單地認識了這個機構刀具固定架一和刀具固定架二的運動軌跡,刀具固定架一和刀具固定架二的速度曲線,給后續實物驗證、實地調研提供了一系列的數據。在后續改進中,需要調整刀具固定架一和刀具固定架二在相對運動前相對的表面距離,根據果實的橫徑和縱徑來調整剪切機構的開口大小,根據果梗被切割時需要的力來調整氣缸輸出力的大小,節約成本。
3 結語
通過SolidWorks軟件和Adams軟件去設計柑橘采摘末端執行器,剪切機構通過平行四邊形的原理來設計,吸附機構通過負壓來吸附果實,使用氣缸作為執行機構,并對柑橘采摘末端執行器進行運動仿真,從仿真中得到運動的位移和速度曲線,節省了大量的時間,降低了成本。
