二次雷達(dá)射頻脈沖信號(hào)時(shí)序記錄系統(tǒng)
2021-01-11 10:12:38李寶鵬王守權(quán)高偉亮張凱旋
自動(dòng)化與儀表 2020年12期
李寶鵬,王守權(quán),高偉亮,張凱旋
(海軍航空大學(xué) 青島校區(qū),青島266041)
二次雷達(dá)在民用上主要用于空中交通管制ATC 系統(tǒng),獲取目標(biāo)的高度、批號(hào);在軍事上主要用于敵我識(shí)別IFF 系統(tǒng),獲取目標(biāo)的“敵我”屬性信息[1]。二次雷達(dá)采用“一問一答”方式,通過詢問機(jī)發(fā)射詢問脈沖和應(yīng)答機(jī)發(fā)回應(yīng)答脈沖來獲取目標(biāo)的相關(guān)信息。二次雷達(dá)詢問機(jī)與應(yīng)答機(jī)之間進(jìn)行信息交互協(xié)同,詢問脈沖與應(yīng)答脈沖必須滿足嚴(yán)格碼型要求和時(shí)序關(guān)系[2]。因此,二次雷達(dá)在日常測(cè)試維護(hù)中,必須對(duì)信號(hào)鏈路周期內(nèi)詢問信號(hào)、應(yīng)答信號(hào)的時(shí)序(脈沖串發(fā)生時(shí)間)進(jìn)行測(cè)試分析。
針對(duì)二次雷達(dá)射頻脈沖信號(hào)時(shí)序測(cè)試項(xiàng)目需求,設(shè)計(jì)研制了二次雷達(dá)詢問/應(yīng)答射頻脈沖時(shí)序數(shù)據(jù)記錄裝置(簡(jiǎn)稱“信號(hào)時(shí)序記錄系統(tǒng)”),可以采集二次雷達(dá)詢問/應(yīng)答脈沖串發(fā)生時(shí)刻,并進(jìn)行“值守式”記錄存儲(chǔ),可提供人機(jī)交互和記錄時(shí)序數(shù)據(jù)導(dǎo)出功能,為二次雷達(dá)的日常檢測(cè)、現(xiàn)場(chǎng)驗(yàn)證和事后分析提供有效的技術(shù)支撐手段。
1 信號(hào)時(shí)序記錄系統(tǒng)功能
以采集應(yīng)答機(jī)射頻脈沖信號(hào)為例,如圖1 所示。時(shí)序記錄系統(tǒng),通過功分器采集應(yīng)答機(jī)天線接收的詢問射頻脈沖信號(hào)和經(jīng)過信號(hào)處理后天線發(fā)射的應(yīng)答射頻脈沖信號(hào),然后對(duì)射頻脈沖進(jìn)行采集并打上時(shí)間戳進(jìn)行記錄。
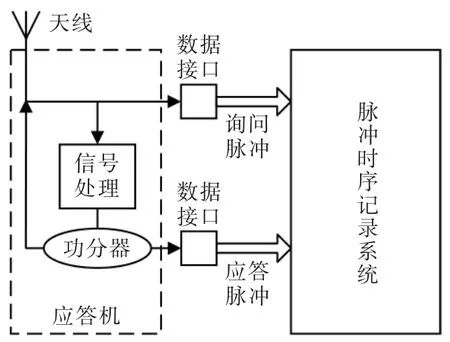
圖1 系統(tǒng)與應(yīng)答機(jī)交聯(lián)關(guān)系Fig.1 Cross-linking relationship between system and transponder
系統(tǒng)功能具體如下:
1)記錄詢問和應(yīng)答事件發(fā)生次數(shù)及時(shí)刻。通過記錄詢問信號(hào)和應(yīng)答信號(hào)脈沖以及發(fā)生時(shí)刻,判斷脈沖串碼型,獲取詢問和應(yīng)答時(shí)間的時(shí)刻及次數(shù),時(shí)間精確到納秒級(jí)。
2)目標(biāo)信號(hào)值守式存儲(chǔ)記錄。有目標(biāo)脈沖才進(jìn)行記錄,其它時(shí)間不記錄,可節(jié)省系統(tǒng)存儲(chǔ)空間。存儲(chǔ)容量為128 GB,持續(xù)記錄時(shí)間大于3 個(gè)月。
3)數(shù)據(jù)導(dǎo)出功能。記錄數(shù)據(jù)結(jié)果可以通過USB接口導(dǎo)出,用于事后分析和處理。
4)支持網(wǎng)絡(luò)通訊,可以對(duì)地面監(jiān)測(cè)站系統(tǒng)進(jìn)行遠(yuǎn)程控制,網(wǎng)口為10 M/100 Mbit·s-1自適應(yīng)接口。
5)人機(jī)交互功能,可以對(duì)記錄信號(hào)的篩選條件,如脈沖幅度、脈沖間隔、脈沖串寬度等進(jìn)行設(shè)置。可以顯示回放記錄應(yīng)答事件及其對(duì)應(yīng)的射頻脈沖波形。
2 系統(tǒng)設(shè)計(jì)
2.1 總體架構(gòu)
信號(hào)時(shí)序記錄系統(tǒng)總體設(shè)計(jì)方案如圖2 所示。系統(tǒng)主要由AD 采集模塊、 主控制器模塊、GPS 模塊、存儲(chǔ)單元、人機(jī)交互面板等五大模塊組成。
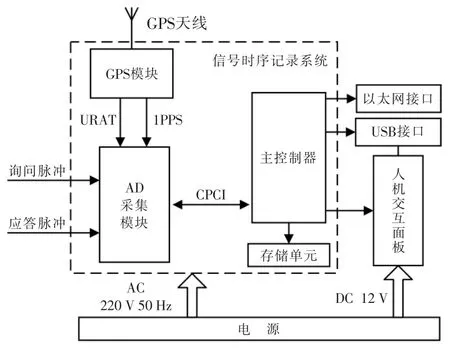
圖2 信號(hào)時(shí)序記錄系統(tǒng)功能框架Fig.2 Functional framework of signal timing recording system
各部分功能如下:
AD 采集模塊用于采集應(yīng)答機(jī)輸出的射頻脈沖信號(hào),以獲取詢問和應(yīng)答事件。AD 采集模塊設(shè)計(jì)2 個(gè)獨(dú)立采樣通道分別對(duì)詢問和應(yīng)答脈沖檢波信號(hào)進(jìn)行采集,并通過內(nèi)置GPS 授時(shí)的高精度計(jì)時(shí)器給采集數(shù)據(jù)提供精確的時(shí)間戳信息,并利用直接存儲(chǔ)器訪問DMA(direct memory access)技術(shù)把A/D 轉(zhuǎn)換數(shù)據(jù)直接寫入主控制器內(nèi)存。
主控制器模塊是數(shù)據(jù)記錄系統(tǒng)的控制核心,負(fù)責(zé)對(duì)各類數(shù)據(jù)進(jìn)行融合和記錄。主要與應(yīng)答機(jī)進(jìn)行通訊,處理采集到的脈沖信號(hào)(詢問/應(yīng)答事件),并為這些事件增加時(shí)間戳信息,以及處理以太網(wǎng)通信,協(xié)調(diào)人機(jī)交互控制等。其內(nèi)部集成了存儲(chǔ)單元用于對(duì)數(shù)據(jù)進(jìn)行有效保存;外部通過CPCI(PCIe)總線與GPS 模塊、AD 模塊交互以獲取位置、時(shí)鐘信息,以及詢問、應(yīng)答脈沖。
GPS 模塊為系統(tǒng)提供準(zhǔn)確的時(shí)間數(shù)據(jù),為采樣數(shù)據(jù)標(biāo)定時(shí)間戳提供精確時(shí)間,同時(shí)提供系統(tǒng)當(dāng)前地理位置信息。
存儲(chǔ)單元負(fù)責(zé)安全、高速、可靠的存儲(chǔ)數(shù)據(jù)信息。
人機(jī)交互面板包括顯示器和鍵盤,用于現(xiàn)場(chǎng)控制及應(yīng)答事件顯示,系統(tǒng)控制參數(shù)的輸入等。
該系統(tǒng)采用監(jiān)守式對(duì)數(shù)據(jù)進(jìn)行采集,當(dāng)接收到脈沖信號(hào)時(shí),首先提取脈沖幅度和脈沖寬度等特征參數(shù),對(duì)信號(hào)類型進(jìn)行篩選判斷,當(dāng)符合詢問/應(yīng)答信號(hào)的特征要求時(shí),才進(jìn)行后續(xù)數(shù)據(jù)采集存儲(chǔ)處理。這種實(shí)現(xiàn)方式。系統(tǒng)信號(hào)處理工作流程如圖3 所示,具體如下:
步驟1設(shè)備啟動(dòng)后,對(duì)數(shù)據(jù)接口接收的信號(hào)進(jìn)行檢波,提取脈沖的幅度和脈寬等參數(shù);
步驟2檢波信號(hào)經(jīng)AD 轉(zhuǎn)換成數(shù)字信號(hào),并交由FPGA 數(shù)據(jù)處理模塊進(jìn)行信號(hào)類型判斷處理;
步驟3當(dāng)脈沖參數(shù)不符合篩選特征時(shí)剔除數(shù)據(jù),重復(fù)步驟1;
步驟4當(dāng)脈沖參數(shù)符合篩選特征時(shí),保留數(shù)據(jù)進(jìn)行采集,F(xiàn)PGA 將為所有的采樣數(shù)據(jù)標(biāo)定一個(gè)時(shí)間戳,采集到的原始數(shù)據(jù)都將被封裝成具有時(shí)間信息的數(shù)據(jù)幀;
步驟5具有時(shí)間戳信息的數(shù)據(jù)幀會(huì)按照FIFO(first-in first-out)的順序,經(jīng)過CPCI 總線傳輸?shù)街骺刂破鳎骺刂破鲿?huì)將數(shù)據(jù)進(jìn)行結(jié)構(gòu)化之后寫入存儲(chǔ)單元執(zhí)行存儲(chǔ)。
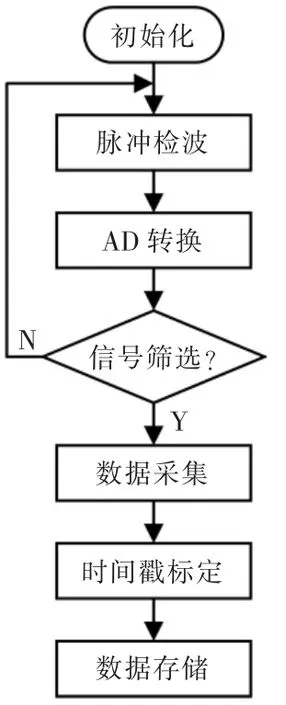
圖3 系統(tǒng)信號(hào)處理工作流程Fig.3 System signal processing flow chart
這種實(shí)現(xiàn)方式下,可以進(jìn)行靈活的篩選條件設(shè)置,在很大程度上增強(qiáng)數(shù)據(jù)記錄的有效性、靈活性,以適應(yīng)不同類型詢問/應(yīng)答脈沖信號(hào)的采集,同時(shí)節(jié)省了數(shù)據(jù)存儲(chǔ)空間。一般采用門限值進(jìn)行篩選,也可根據(jù)需求啟用簡(jiǎn)單的特征比較進(jìn)行篩選。不同的設(shè)定將為最終的數(shù)據(jù)記錄結(jié)果帶來不同的影響。
2.2 硬件設(shè)計(jì)
系統(tǒng)硬件交聯(lián)關(guān)系如圖4 所示。主控器選用型號(hào)UFO6388 貨架產(chǎn)品,內(nèi)置Intel I5 四核處理器,主頻為2.1 GHz 搭載2 GB 及以上內(nèi)存,板載10 M/100 M/1000 Mbit·s-1自適應(yīng)以太網(wǎng)接口及其它常用接口。內(nèi)置的存儲(chǔ)單元采用電子固態(tài)硬盤,讀取速度達(dá)到400 MB/s,寫盤速度可達(dá)90 MB/s,完全滿足記錄和導(dǎo)出的要求[3-4]。
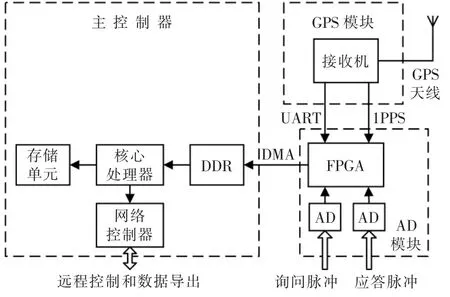
圖4 系統(tǒng)硬件模塊交聯(lián)關(guān)系Fig.4 Cross-linking relationship between system hardware modules
GPS 模塊采用U-blox NEO-M8T 高精度精密授時(shí)模塊,內(nèi)部接收機(jī)完成信號(hào)處理后通過UART 總線和中斷為系統(tǒng)提供定位、時(shí)間以及1PPS 脈沖信息,模塊與FPGA 系統(tǒng)主要有兩部分通信,一部分是通過UART 讀取實(shí)時(shí)時(shí)間和位置信息,另一部分為Time-pulse 接口,通過0.25 Hz~40 MHz 脈沖進(jìn)行時(shí)間校正以及精確計(jì)時(shí)。
AD 模塊為系統(tǒng)獨(dú)立設(shè)計(jì)模塊,其硬件結(jié)構(gòu)框架如圖5 所示。
圖中,主芯片采用Altera FPGA(型號(hào)EP4CGX75 CF23I7N),負(fù)責(zé)數(shù)字信號(hào)獲取、標(biāo)記及傳輸。在通信方式上,除PCIe 部分需要FPGA 內(nèi)部專用接口采用DMA 方式傳輸外,其余接口均為通用IO[5-6]。電源采用四通道BUCK 芯片(型號(hào)ADP5054),4.5~15 V 寬范圍輸入,250 kHz~2 MHz 開關(guān)頻率可設(shè),低噪聲,輸出時(shí)序可控。考慮到雜波及抗干擾與阻抗匹配,在前端將AD8065 放大器作為調(diào)理濾波電路,同時(shí)也對(duì)AD 芯片端口起到基本防護(hù)作用。AD 部分將選用使用AD9226,采用通用并行數(shù)據(jù)接口,具有12 位精度,采樣率60 MS/s。上位機(jī)主要包含采集卡驅(qū)動(dòng)、接口調(diào)用函數(shù)、調(diào)試操作界面等3 個(gè)模塊。驅(qū)動(dòng)層為內(nèi)部接口,負(fù)責(zé)完成板卡與PC 系統(tǒng)之間基礎(chǔ)通信,PC則可對(duì)板卡實(shí)時(shí)相關(guān)指令控制以及采集數(shù)據(jù)讀取。
3 軟件設(shè)計(jì)
系統(tǒng)軟件從功能架構(gòu)劃分了4 個(gè)模塊,分別為系統(tǒng)管理和交互模塊、AD 數(shù)據(jù)處理模塊、位置信息處理模塊、數(shù)據(jù)管理模塊。其中,系統(tǒng)管理和交互模塊是整個(gè)系統(tǒng)的主控模塊,同時(shí)還通過以太網(wǎng)接口對(duì)外提供交互。系統(tǒng)軟件結(jié)構(gòu)如圖6 所示。
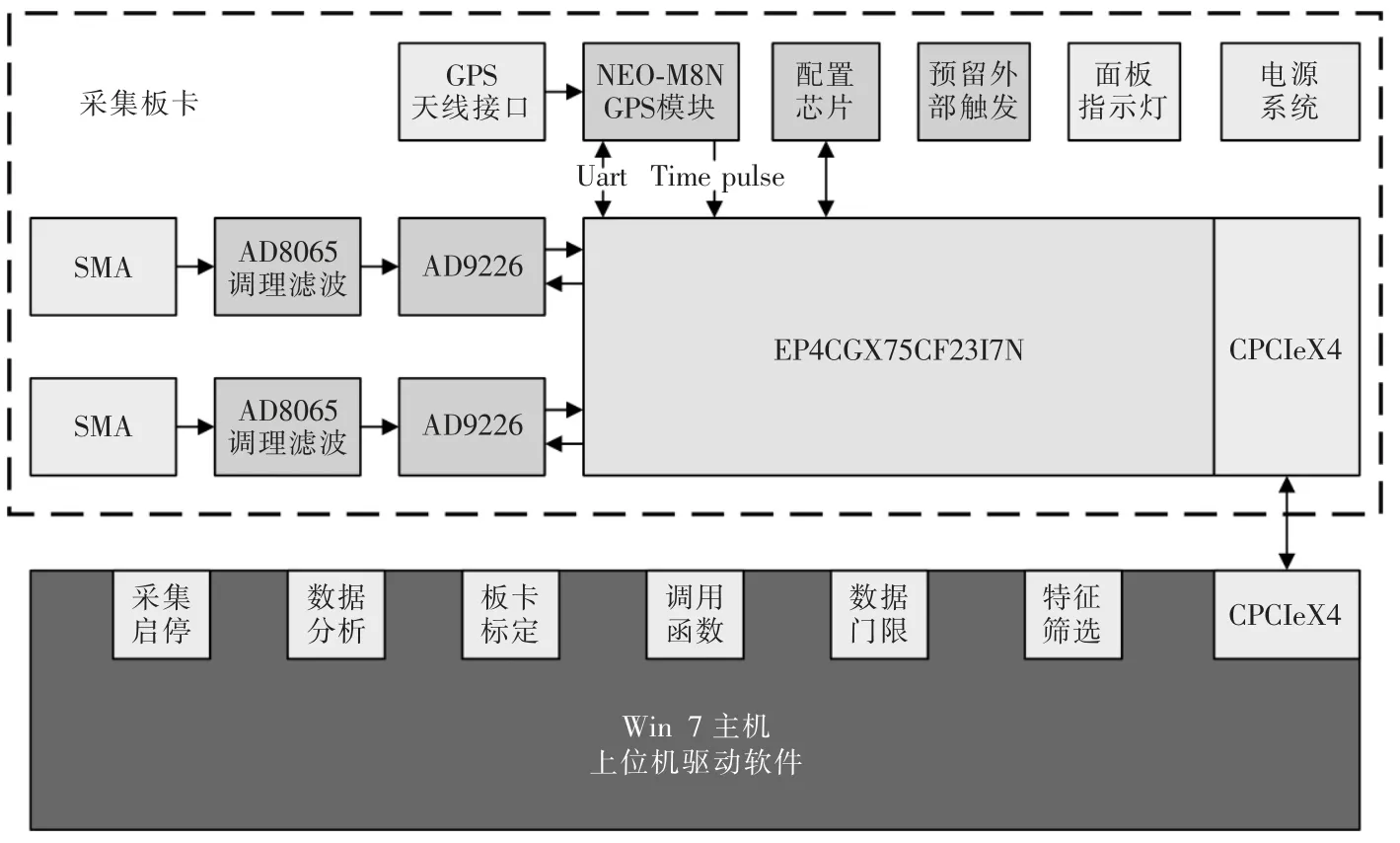
圖5 AD 模塊硬件框架Fig.5 AD module hardware framework
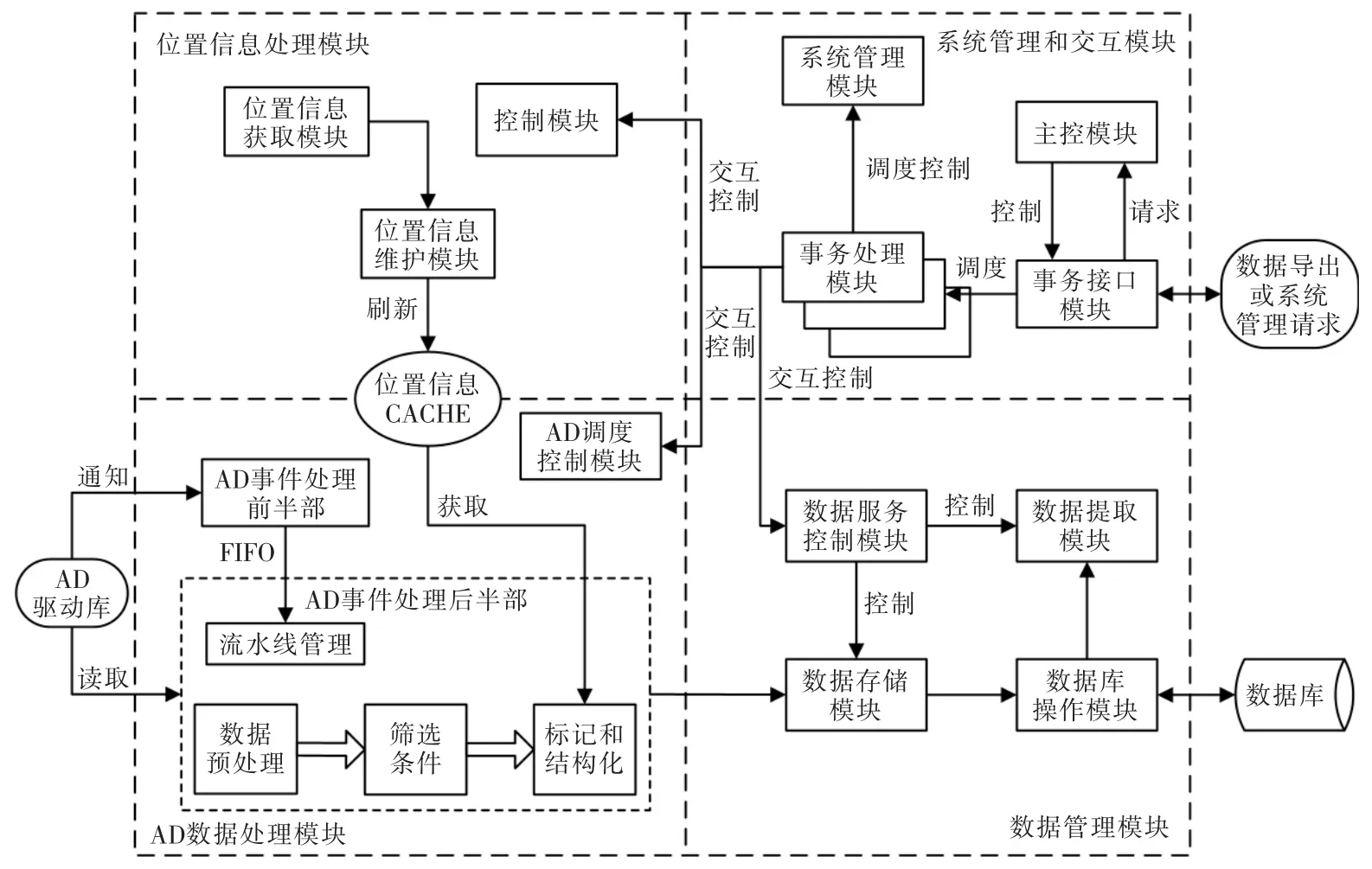
圖6 軟件結(jié)構(gòu)Fig.6 Software structure
1)系統(tǒng)管理和交互模塊 負(fù)責(zé)整個(gè)系統(tǒng)的調(diào)度和控制,其主要由4 個(gè)子模塊組成。①主控模塊,負(fù)責(zé)整個(gè)系統(tǒng)的控制,其運(yùn)行流程如圖7 所示。該模塊在完成系統(tǒng)的啟動(dòng)和初始化工作后,長(zhǎng)期阻塞在事件循環(huán)(Eventloop)中,等待并處理用戶交互權(quán)限、操作系統(tǒng)事件、功能模塊狀態(tài)、啟停處理各類控制事件[7]。②事務(wù)接口模塊,作為整個(gè)系統(tǒng)的外部通信接口,以網(wǎng)絡(luò)服務(wù)器的形式為用戶提供數(shù)據(jù)導(dǎo)出、系統(tǒng)控制等交互服務(wù)。同時(shí),它也是主控模塊的控制接口,用來下達(dá)各類控制指令,此外該模塊還負(fù)責(zé)人機(jī)交互。③事務(wù)處理模塊,與各個(gè)功能模塊進(jìn)行交互,協(xié)調(diào)各功能模塊具體處理事務(wù)請(qǐng)求。事務(wù)接口模塊與事務(wù)處理模塊共同構(gòu)成一個(gè)并發(fā)服務(wù)器模型,兩個(gè)模塊中后者在結(jié)構(gòu)上是一個(gè)事務(wù)處理線程池,而前者負(fù)責(zé)快速分類和響應(yīng)各項(xiàng)事務(wù)請(qǐng)求。④系統(tǒng)管理模塊,負(fù)責(zé)對(duì)計(jì)算機(jī)系統(tǒng)產(chǎn)生交互,完成系統(tǒng)管理的相關(guān)工作。
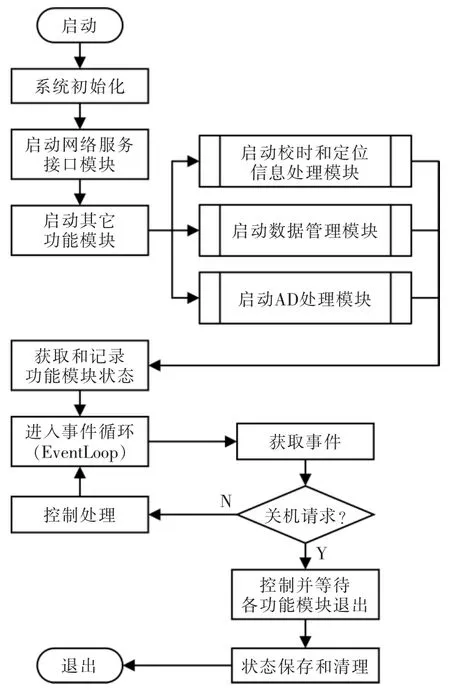
圖7 主控模塊的流程Fig.7 Flow chart of main control module
2)AD 數(shù)據(jù)處理模塊 負(fù)責(zé)處理從應(yīng)答機(jī)獲取的詢問脈沖和應(yīng)答脈沖數(shù)據(jù),用于AD 調(diào)度控制模塊設(shè)備控制和功能調(diào)度,并對(duì)原始數(shù)據(jù)進(jìn)行條件篩選。該模塊分為前半部和后半部2 個(gè)部分:AD 事件處理前半部模塊,具有應(yīng)用軟件系統(tǒng)內(nèi)部最高的執(zhí)行優(yōu)先級(jí),其主要作用是等待AD 采樣通知的達(dá)到,并立即推送至緩存管道;AD 事件處理后半部模塊則按一般優(yōu)先級(jí),(在稍后) 通過FIFO 管道獲取前半部生成的數(shù)據(jù)送達(dá)信息,并以三級(jí)流水線方式分步對(duì)數(shù)據(jù)進(jìn)行讀取、預(yù)處理、標(biāo)記及結(jié)構(gòu)化等工作,最后將采集數(shù)據(jù)推送給數(shù)據(jù)管理模塊。
3)位置信息處理模塊 主要負(fù)責(zé)系統(tǒng)時(shí)鐘和位置信息獲取和維護(hù)等功能。其中,控制模塊一方面負(fù)責(zé)外部設(shè)備控制,另一方面控制協(xié)調(diào)內(nèi)部各相關(guān)子模塊的運(yùn)行;位置信息維護(hù)模塊和位置信息獲取模塊協(xié)同完成位置信息的獲取和刷新,并以“讀優(yōu)先”Cache 的形式提供最新的位置信息獲取接口。
4)數(shù)據(jù)管理模塊 負(fù)責(zé)數(shù)據(jù)的存儲(chǔ)、導(dǎo)出,以及數(shù)據(jù)庫(kù)的管理。其底層的數(shù)據(jù)庫(kù)操作模塊為其它功能模塊提供同步的操作支持,數(shù)據(jù)存儲(chǔ)模塊和數(shù)據(jù)提取模塊則分別負(fù)責(zé)具體的存儲(chǔ)和導(dǎo)出操作,數(shù)據(jù)服務(wù)控制模塊對(duì)其它模塊進(jìn)行控制調(diào)度。
4 系統(tǒng)測(cè)試
4.1 脈沖信號(hào)采集測(cè)試
采用信號(hào)注入法使用同軸線纜連接信號(hào)源和應(yīng)答脈沖采集接口,信號(hào)源產(chǎn)生幅值范圍為3 V,寬度為10 μs 的脈沖信號(hào)。系統(tǒng)采集信號(hào)篩選條件設(shè)置為幅值3.5~4 V,脈寬9~11 μs。系統(tǒng)采集得到的射頻脈沖顯示畫面如圖8 所示,采集結(jié)果與信號(hào)源設(shè)置信號(hào)參數(shù)完全一致。
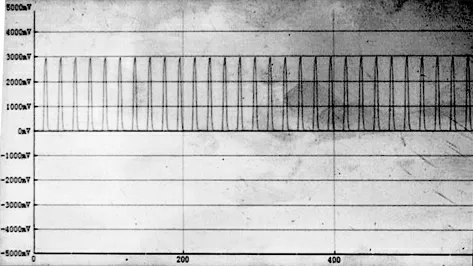
圖8 系統(tǒng)采集脈沖顯示界面Fig.8 System acquisition pulse display interface
4.2 脈沖信號(hào)時(shí)序記錄測(cè)試
利用圖1 所示交聯(lián)關(guān)系,連接信號(hào)時(shí)序記錄系統(tǒng)與應(yīng)答脈沖模擬器,使應(yīng)答脈沖模擬器發(fā)射100個(gè)應(yīng)答脈沖串信號(hào),設(shè)置系統(tǒng)采集信號(hào)篩選條件為幅值0.2~5 V,脈寬20~22 μs。系統(tǒng)采集到應(yīng)答脈沖信號(hào)為100 次,采集脈沖時(shí)序部分原始數(shù)據(jù)見表1。
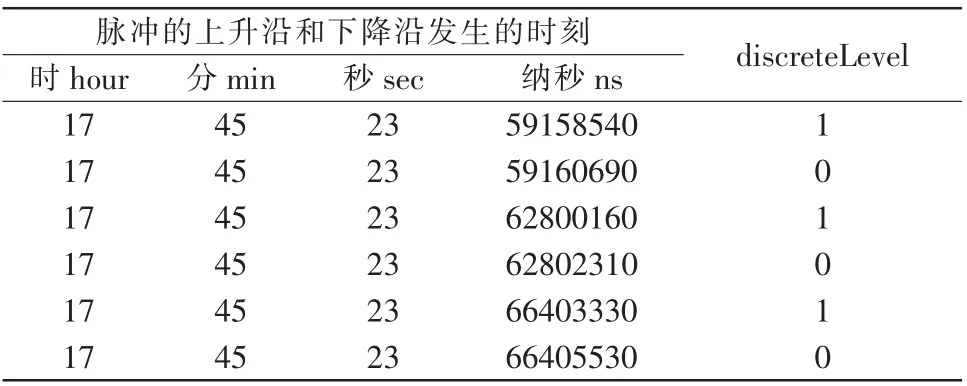
表1 系統(tǒng)采集脈沖時(shí)序數(shù)據(jù)Tab.1 Pulse time sequence data collected by system
表中,離散水平discreteLevel 一列的“1”表示脈沖上升沿,“0”表示脈沖下降沿。由表可知該系統(tǒng)所記錄的脈沖時(shí)序非常精確。
5 結(jié)語
針對(duì)二次雷達(dá)信號(hào)測(cè)試需求,設(shè)計(jì)研制了一種二次雷達(dá)詢問/應(yīng)答射頻脈沖時(shí)序記錄系統(tǒng),系統(tǒng)可以記錄射頻脈沖的發(fā)生時(shí)序,幫助檢查二次雷達(dá)信號(hào)鏈路的時(shí)序關(guān)系是否正確。目前該系統(tǒng)已在某型二次雷達(dá)系統(tǒng)性能測(cè)試外場(chǎng)試驗(yàn)中得到應(yīng)用,系統(tǒng)采集數(shù)據(jù)速度快、精確高,對(duì)目標(biāo)信號(hào)捕捉的概率可達(dá)到100%。通過更改系統(tǒng)的信號(hào)篩選條件,該系統(tǒng)可以應(yīng)用于其他類型射頻脈沖信號(hào)時(shí)序記錄,具有一定的推廣應(yīng)用價(jià)值。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中外會(huì)展(2014年4期)2014-11-27 07:46:46
