執(zhí)行器故障下的運(yùn)載火箭非奇異終端滑模容錯(cuò)控制
2021-01-12 13:55:16馬艷如胡昌華周志杰梁小輝
宇航學(xué)報(bào) 2020年12期
馬艷如,王 青,胡昌華,周志杰,梁小輝
(1. 北京航空航天大學(xué)自動(dòng)化科學(xué)與電氣工程學(xué)院,北京 100191;2. 火箭軍工程大學(xué)導(dǎo)彈工程學(xué)院,西安 710025)
0 引 言
近年來(lái),隨著航空航天技術(shù)的發(fā)展,運(yùn)載火箭成為人類(lèi)進(jìn)入太空的重要工具,承擔(dān)任務(wù)種類(lèi)愈加復(fù)雜,承載載荷愈發(fā)多樣[1]。例如,中國(guó)的長(zhǎng)征系列運(yùn)載火箭和美國(guó)NASA的Ares系列運(yùn)載火箭、美國(guó)太空探索技術(shù)公司(SpaceX)獵鷹系列運(yùn)載火箭等[2],承擔(dān)發(fā)射不同地球軌道衛(wèi)星和載人飛船的任務(wù)。發(fā)射任務(wù)一旦失敗,不僅會(huì)帶來(lái)巨大的經(jīng)濟(jì)損失,還會(huì)影響其戰(zhàn)略、軍事、外交等[3]。然而,運(yùn)載火箭發(fā)射失敗的主要原因是控制精度不夠和機(jī)械故障等。因此,在如此耗資巨大和復(fù)雜的系統(tǒng)中,提高系統(tǒng)的控制精度和在故障下仍能保持良好的控制性能顯得尤為重要。滑模控制因其對(duì)外界干擾和不確定參數(shù)具有強(qiáng)魯棒性、快速全局收斂特性和對(duì)建模誤差不敏感等特性。廣泛應(yīng)用于機(jī)器人控制、化工控制和航空航天等領(lǐng)域[4-6]。傳統(tǒng)滑模控制采用線性滑模面,不具備有限時(shí)間收斂特性[7],而非奇異終端滑模控制不但能實(shí)現(xiàn)有限時(shí)間收斂,而且改進(jìn)了傳統(tǒng)的終端滑模控制存在控制輸入趨于無(wú)窮大的問(wèn)題,成為當(dāng)前研究熱點(diǎn),并取得了一定成果。
非奇異終端滑模控制方法在航天器控制方面取得了許多成果[8-12]。文獻(xiàn)[8-12]考慮模型不確定性和外部干擾的情況對(duì)控制器進(jìn)行設(shè)計(jì);不同之處在于文獻(xiàn)[8]構(gòu)造了固定時(shí)間擴(kuò)張狀態(tài)觀測(cè)器,用于估計(jì)外部干擾和不確定狀態(tài)的總擾動(dòng),設(shè)計(jì)了一種新的非奇異快速終端滑模面,并根據(jù)總擾動(dòng)的估計(jì)和提出的滑模面設(shè)計(jì)了相應(yīng)的固定時(shí)間控制器。文獻(xiàn)[9]重點(diǎn)解決具有未知邊界擾動(dòng)的撓性航天器有限時(shí)間姿態(tài)控制問(wèn)題。文獻(xiàn)[10]針對(duì)航天器姿態(tài)跟蹤控制問(wèn)題提出一種復(fù)合控制器。該控制器由非奇異終端滑模法的反饋控制和基于有限時(shí)間擾動(dòng)觀測(cè)器的補(bǔ)償項(xiàng)組成。文獻(xiàn)[11]設(shè)計(jì)了非奇異快速終端滑模動(dòng)態(tài)輸出反饋控制器,僅利用角速度和角度信息實(shí)現(xiàn)有限時(shí)間快速姿態(tài)穩(wěn)定。文獻(xiàn)[12]在反步法中最后一步設(shè)計(jì)了終端滑模控制法,以保證有限時(shí)間收斂。眾多文獻(xiàn)[13-15]對(duì)更為復(fù)雜的模型控制問(wèn)題作了研究。文獻(xiàn)[13]針對(duì)存在模型不確定性的再入飛行器提出了基于神經(jīng)網(wǎng)絡(luò)的固定時(shí)間終端滑模控制律,引入飽和函數(shù)以避免奇異性問(wèn)題。自適應(yīng)神經(jīng)網(wǎng)絡(luò)用于估計(jì)飛行器的不確定性,從而在不犧牲魯棒性的情況下減輕了顫動(dòng)。文獻(xiàn)[14]基于非奇異終端滑模技術(shù)和徑向基神經(jīng)網(wǎng)絡(luò)設(shè)計(jì)了航天器編隊(duì)飛行多目標(biāo)姿態(tài)跟蹤魯棒控制器。魯棒控制器由徑向基神經(jīng)網(wǎng)絡(luò)和自適應(yīng)控制器組成,并根據(jù)非奇異終端滑模有限時(shí)間收斂特性,提出了一種徑向基網(wǎng)絡(luò)在線學(xué)習(xí)算法,提高其逼近效率。文獻(xiàn)[15]將非奇異終端滑模控制與自適應(yīng)方法相結(jié)合,自適應(yīng)更新律用于估計(jì)各種不確定性的邊界。
與上述方法不同,本文提出了一種新型非奇異終端滑模控制設(shè)計(jì)方法,將應(yīng)用于單輸入單輸出(SISO)系統(tǒng)的終端滑模方法[16]擴(kuò)展到多輸入多輸出(MIMO)非線性系統(tǒng),且考慮系統(tǒng)在執(zhí)行器卡死故障下的控制。首先,本文針對(duì)存在執(zhí)行器卡死故障的運(yùn)載火箭姿態(tài)跟蹤系統(tǒng)設(shè)計(jì)了一種新型終端滑模面,基于李雅普諾夫函數(shù)證明系統(tǒng)能在有限時(shí)間到達(dá)滑模面。而對(duì)于奇異問(wèn)題,本文修改了奇異區(qū)域的控制律。當(dāng)閉環(huán)系統(tǒng)到達(dá)滑模面后,原點(diǎn)是該系統(tǒng)的全局漸近穩(wěn)定點(diǎn)。能較快實(shí)現(xiàn)運(yùn)載火箭姿態(tài)跟蹤系統(tǒng)的控制。
本文對(duì)存在執(zhí)行器卡死故障的運(yùn)載火箭姿態(tài)控制跟蹤問(wèn)題進(jìn)行研究。首先對(duì)運(yùn)載火箭姿態(tài)控制系統(tǒng)進(jìn)行動(dòng)力學(xué)建模;在此基礎(chǔ)上考慮未知干擾和執(zhí)行器故障建立系統(tǒng)模型,執(zhí)行器故障主要考慮執(zhí)行機(jī)構(gòu)卡死故障,將干擾和執(zhí)行器故障視為廣義干擾,并將系統(tǒng)轉(zhuǎn)換為一種多輸入多輸出系統(tǒng),該系統(tǒng)為三個(gè)獨(dú)立的二階單輸入單輸出微分方程。利用非奇異終端滑模控制技術(shù),實(shí)現(xiàn)了故障下的運(yùn)載火箭姿態(tài)角非線性跟蹤控制,同時(shí)保證運(yùn)載火箭的控制精度。
1 系統(tǒng)動(dòng)力學(xué)模型

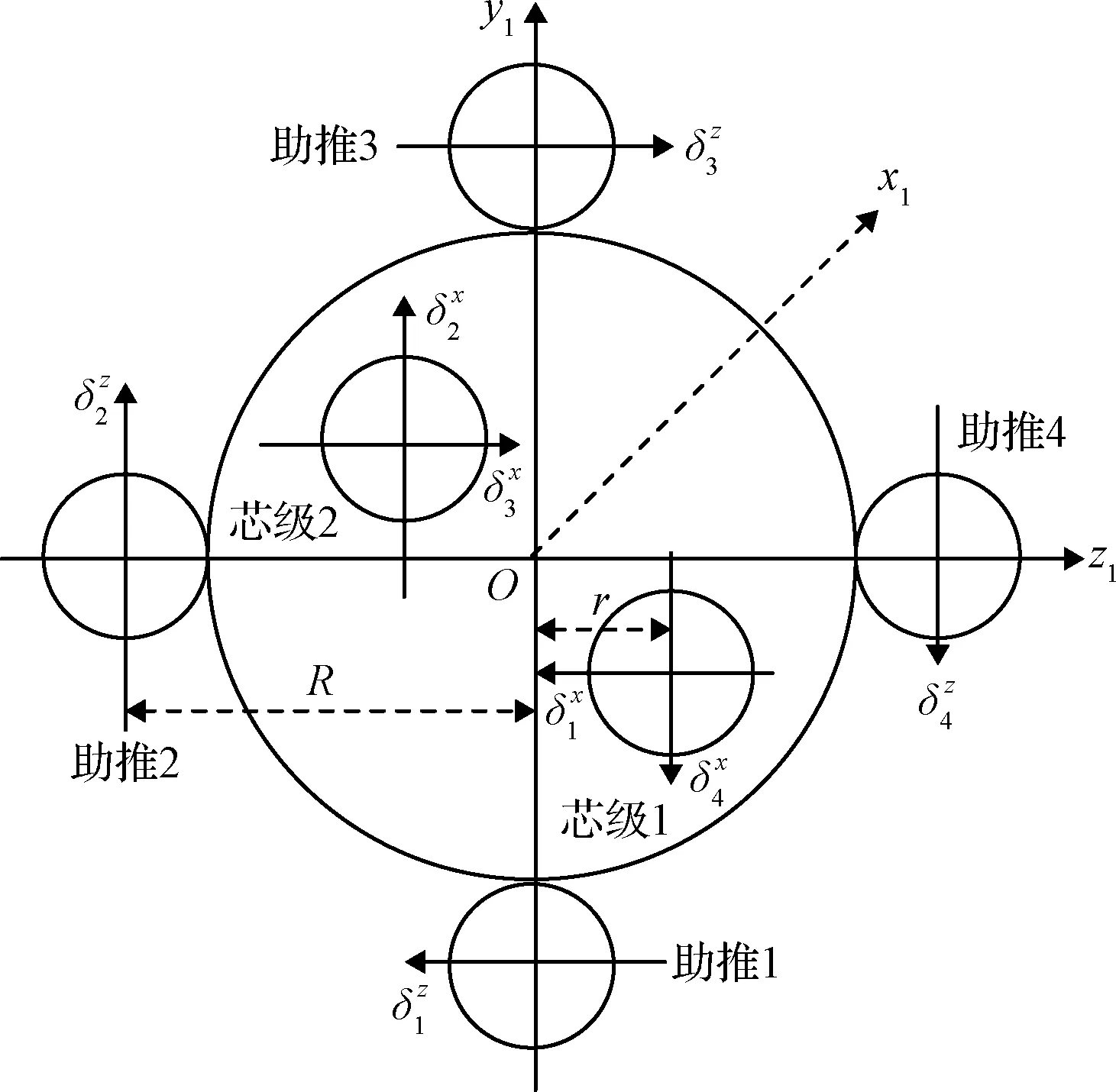
圖1 運(yùn)載火箭發(fā)動(dòng)機(jī)布局尾視圖
(1)
(2a)
(2b)
對(duì)于某大型運(yùn)載火箭,忽略彈性模態(tài),并將燃油晃動(dòng)和氣動(dòng)力矩考慮到干擾中,建立其旋轉(zhuǎn)運(yùn)動(dòng)模型:
(3)
式中:J=diag(Jxx,Jyy,Jzz)∈R3×3為運(yùn)載火箭的轉(zhuǎn)動(dòng)慣量矩陣;ω=[ωx,ωy,ωz]T為角速度;矩陣κ定義為:
(4)
式中:u為控制輸入向量;ufault為執(zhí)行器故障輸入矩陣;D=[Dx,Dy,Dz]T為干擾向量。
式(3)中的控制輸入力矩u由6個(gè)發(fā)動(dòng)機(jī)擺動(dòng)產(chǎn)生。其中,控制力矩為:
(5)
式中:R=3 m和r=1 m分別為助推發(fā)動(dòng)機(jī)中心和芯級(jí)發(fā)動(dòng)機(jī)中心到運(yùn)載火箭箭體x軸的距離。XR為發(fā)動(dòng)機(jī)噴嘴到火箭頂端的距離;XZ為質(zhì)心位置;P為每個(gè)發(fā)動(dòng)機(jī)的推力。將式(1)代入式(5),可得:
u=Bδ
(6)
式中:B為輸入矩陣,其中

(7)
C=Pdiag(-4R,-2(XR-XZ),-2(XR-XZ))。
根據(jù)慣性坐標(biāo)系與機(jī)體坐標(biāo)系之間的關(guān)系,可以得到運(yùn)載火箭姿態(tài)運(yùn)動(dòng)方程為:

(8)
式中:Ω=[φ,φ,θ]T,φ為滾轉(zhuǎn)角,φ為偏航角,θ為俯仰角。其中,Z(Ω)的定義為:
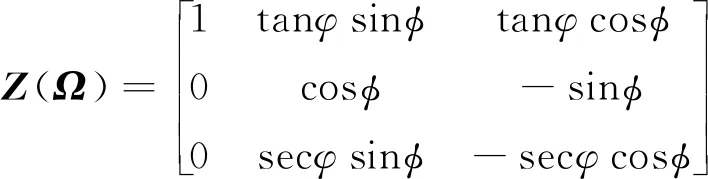
(9)
根據(jù)式(1)~(9),建立運(yùn)載火箭動(dòng)力學(xué)模型:
(10)
式(10)中的第一項(xiàng)對(duì)時(shí)間微分,可得:

(11)
由式(10)可得:
(12)

(13)
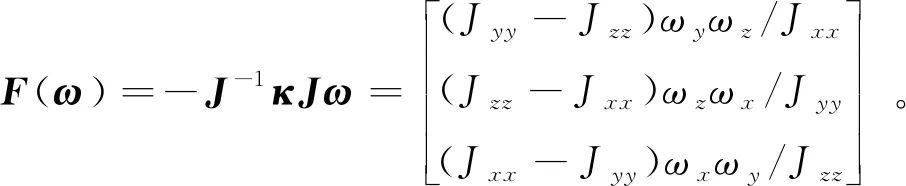
式中:f(x)∈R3,G(x)∈R3×3,d∈R3。其中,上述三項(xiàng)的定義為:
(14)
令xr為運(yùn)載火箭姿態(tài)角參考信號(hào),即xr=[φr,φr,θr]T,φr,φr,θr分別為滾轉(zhuǎn)角、偏航角和俯仰角參考信號(hào)。定義系統(tǒng)誤差信號(hào):
(15)
為簡(jiǎn)化閉環(huán)跟蹤控制系統(tǒng)問(wèn)題,給出下述假設(shè)條件。
假設(shè)1[17]. 在任意t>0時(shí)刻,令λ=(ufault+D),并定義λ′=[|λ1|, |λ2|, |λ3|]T,且廣義干擾λ′均有上屆λup,其中λup∈R3,定義λ′≤λup,即|λi|<λiup,i=1,2,3。
假設(shè)2[16]. 控制輸入向量δ(t)∈L2空間,即δ(t)在任何有限時(shí)間內(nèi)的積分均有界。
假設(shè)3[17]. 姿態(tài)角指令參考信號(hào)xr和其前二階導(dǎo)數(shù)均可得到且有界。
本文的控制目標(biāo)為設(shè)計(jì)控制器δ(t)使得滿足上述假設(shè)條件的運(yùn)載火箭姿態(tài)系統(tǒng)(10)能在有限時(shí)間跟蹤到期望值,并且有良好的控制精度,即:
(16)
2 非奇異終端滑模控制器設(shè)計(jì)
(17)
對(duì)于式(17)所描述的系統(tǒng),本文設(shè)計(jì)了一種非奇異終端滑模控制器,實(shí)現(xiàn)對(duì)火箭姿態(tài)角的快速跟蹤。首先介紹本文在設(shè)計(jì)控制器時(shí)所用到的引理。
設(shè)計(jì)如下終端滑模面:
s=v2+c1v1+c2sigβ(v1)
(18)
式中:s=[s1,s2,s3]T∈R3,0<β<1。其中定義c1v1=c1[v11,v12,v13]T,且c1,c2滿足c1,c2>0,sigβ(v1)=[sigβ(v11), sigβ(v12), sigβ(v13)]T,定義sigβ(x)=|x|βsgn(x),其中,符號(hào)函數(shù)sgn(x)定義為:
并令:
h′(v1)=c1v1+c2sigβ(v1)
(19)
由式(19)可知:limz→0h′(z)=0。

(20)
由式(20)可知,V1>0,并對(duì)V1求導(dǎo)可得:
-zT(t)(c1z(t)+c2sigβ(z(t)))=
-c1zT(t)z(t)-c2zT(t)sigβ(z(t))=
(21)
定理1. 對(duì)于運(yùn)載火箭姿態(tài)控制系統(tǒng)(10),如果假設(shè)1~3都成立,根據(jù)式(18)所設(shè)計(jì)的終端滑模控制律保證該系統(tǒng)在有限時(shí)間內(nèi)跟蹤參考信號(hào),控制律如下:
δ=δeq+δd
(22)
(23)

證. 首先選取如下李雅普諾夫候選函數(shù):
(24)
(25)
將式(22)和(23)代入式(25)可得:
(26)
將式(26)代入可得:
(27)

由引理1,系統(tǒng)可在有限時(shí)間到達(dá)滑模面s=0,假設(shè)到達(dá)滑模面時(shí)間為T(mén)r。由式(18)可得:
(28)
由此可知,可以利用定理1所提出的控制律實(shí)現(xiàn)運(yùn)載火箭姿態(tài)跟蹤系統(tǒng)有限時(shí)間收斂。

(29)

綜上所述,下面給出非奇異終端控制律:
(30)
3 仿真校驗(yàn)
本文以文獻(xiàn)[17]中運(yùn)載火箭姿態(tài)控制系統(tǒng)為例,校驗(yàn)所提出的非奇異終端滑模控制方案的有效性。運(yùn)載火箭總飛行時(shí)間為160 s,每個(gè)發(fā)動(dòng)機(jī)的推力為P=1200000 N,轉(zhuǎn)動(dòng)慣量(Jxx,Jyy,Jzz)和火箭在質(zhì)心位置Xz是時(shí)間的線性函數(shù),表1給出了具體參數(shù)。初始姿態(tài)角為x1(0)=[-0.1, 10.1, 79.9]T。姿態(tài)控制系統(tǒng)的參考信號(hào)xir,i=1,2,3分別為:
式中:ω1,2=0.1,ω3=0.05,ζ1,2,3=1,p1,3=0.2,p2=0.4。本文設(shè)置助推發(fā)動(dòng)機(jī)2在初始時(shí)刻卡死,且卡死角度為5°,之后助推發(fā)動(dòng)機(jī)2擺角保持常數(shù)不變。圖2~4為運(yùn)載火箭故障下姿態(tài)角跟蹤軌跡。其中,圖2為滾轉(zhuǎn)角跟蹤軌跡;圖3為偏航角跟蹤軌跡;圖4為俯仰角跟蹤軌跡。由圖2~4可知,通過(guò)設(shè)計(jì)的非奇異終端滑模控制律,可以保證姿態(tài)角能夠跟蹤控制指令。圖5為姿態(tài)角跟蹤誤差,姿態(tài)角初始值存在一定的誤差,隨著時(shí)間變化,誤差逐漸減小,并在穩(wěn)態(tài)時(shí)誤差角小于0.02°,由此可知運(yùn)載火箭姿態(tài)角控制精度較好。此外,由圖5可知,偏航角和俯仰角誤差角度為0時(shí),其導(dǎo)數(shù)不為0,即本文的奇異區(qū)域,本文通過(guò)修改該區(qū)域的控制律避免奇異問(wèn)題的出現(xiàn)。且與文獻(xiàn)[17]對(duì)比,本文設(shè)置的故障角度較大,但最終誤差角相比更小,具有更高的控制精度。圖6為整角速度ω=[ωx,ωy,ωz]T的變化曲線。圖7為助推發(fā)動(dòng)機(jī)擺角變化曲線,由圖7可知,初始時(shí)刻助推發(fā)動(dòng)機(jī)2卡死,擺角保持在5°不變,系統(tǒng)穩(wěn)定之后,助推發(fā)動(dòng)機(jī)1、3、4的擺角不為0,保持在某個(gè)常數(shù)。圖8為芯級(jí)發(fā)動(dòng)機(jī)擺角變化曲線,由圖可知,當(dāng)系統(tǒng)穩(wěn)定后,芯級(jí)發(fā)動(dòng)機(jī)的擺角同樣保持在某個(gè)不為0的常數(shù)。即當(dāng)某個(gè)發(fā)動(dòng)機(jī)發(fā)生故障如卡死故障時(shí),本文所設(shè)計(jì)的控制律借助其余助推發(fā)動(dòng)機(jī)和芯級(jí)發(fā)動(dòng)機(jī)來(lái)平衡該故障帶來(lái)的影響。由圖2~4可知,運(yùn)載火箭發(fā)動(dòng)機(jī)發(fā)生故障后,姿態(tài)角仍能較好跟蹤參考信號(hào)。因此,本文提出的基于非奇異終端滑模控制策略可以控制故障下運(yùn)載火箭姿態(tài)跟蹤系統(tǒng),且具有良好的控制精度。

表1 運(yùn)載火箭仿真中的參數(shù)Table 1 Parameter of launch vehicle used in numerical simulations
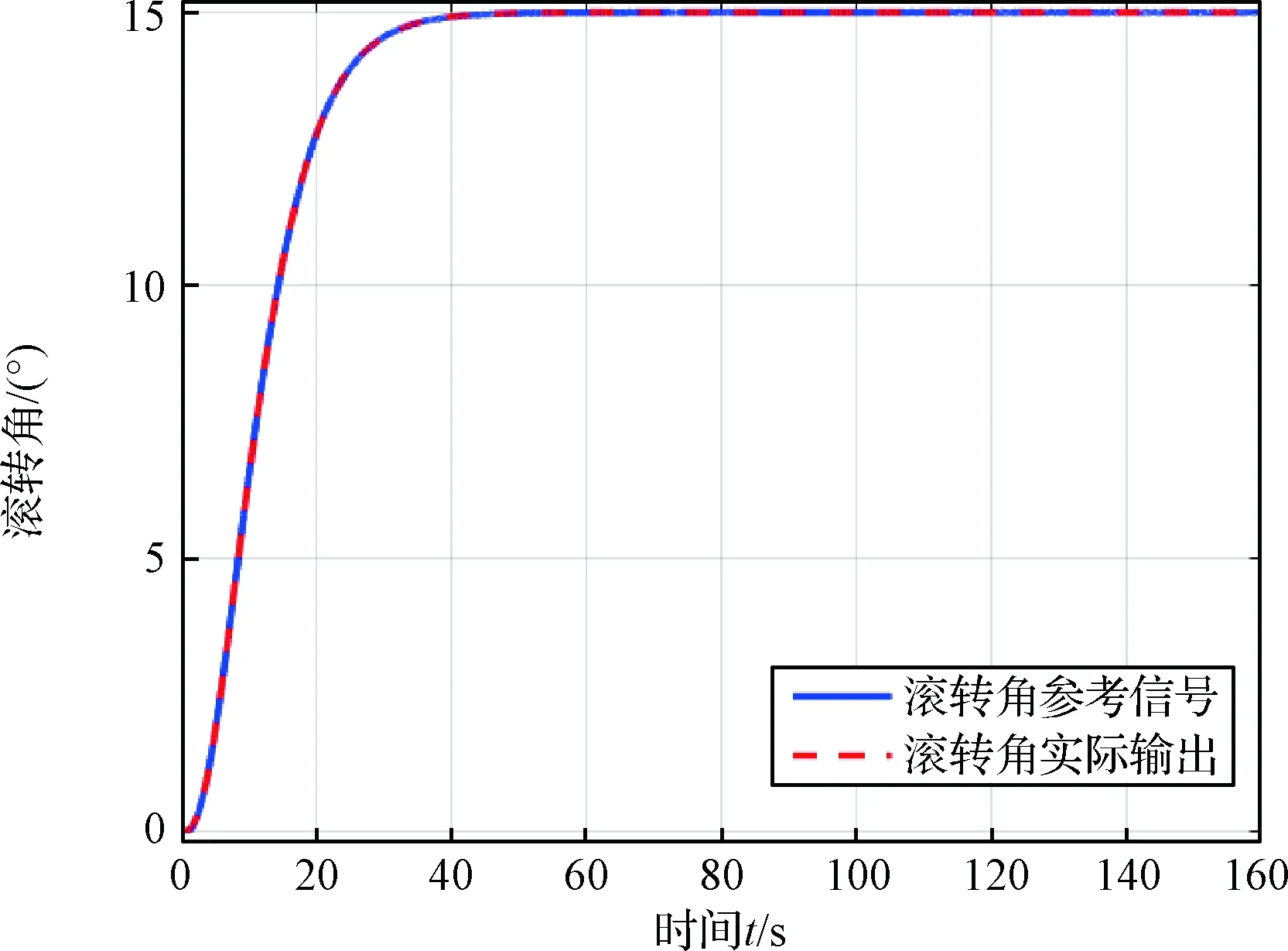
圖2 滾轉(zhuǎn)角跟蹤軌跡
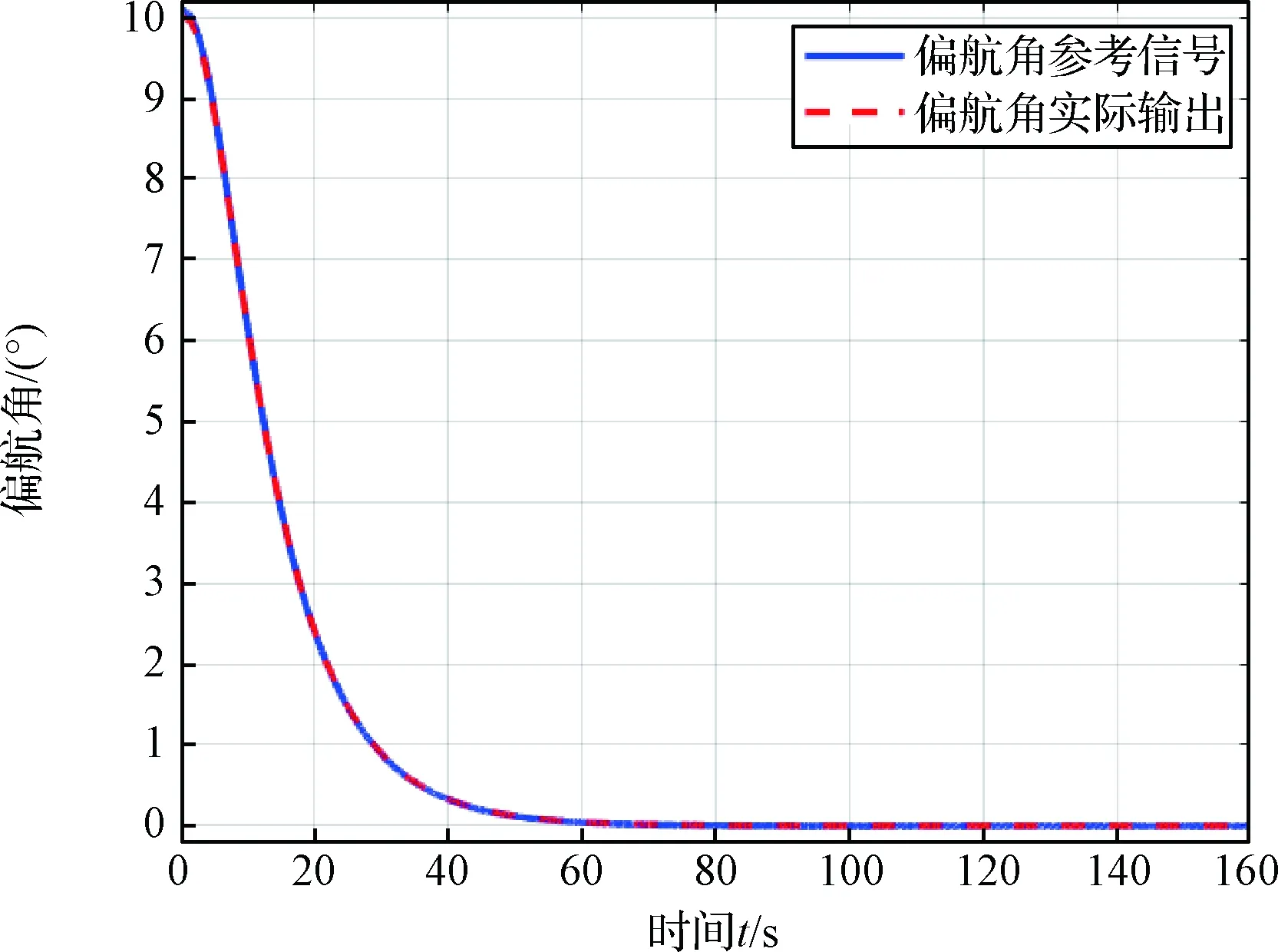
圖3 偏航角跟蹤軌跡
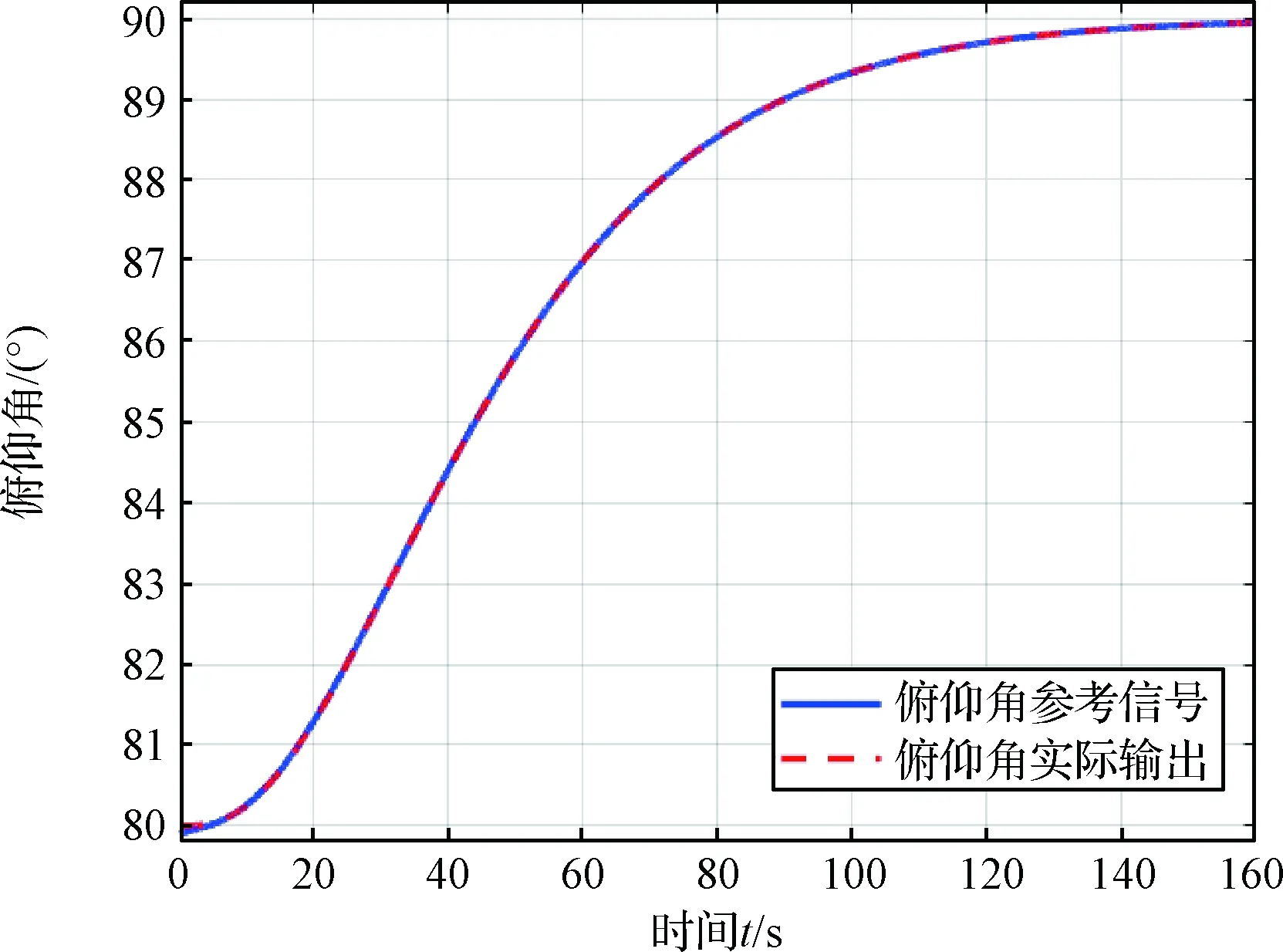
圖4 俯仰角跟蹤軌跡

圖5 姿態(tài)角跟蹤誤差
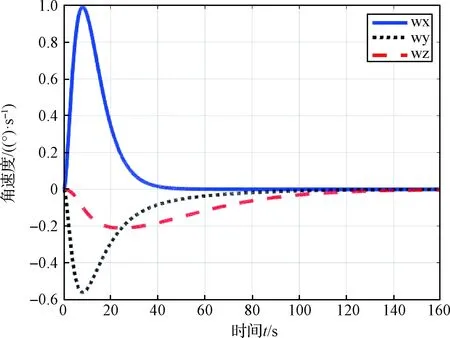
圖6 角速度變化曲線
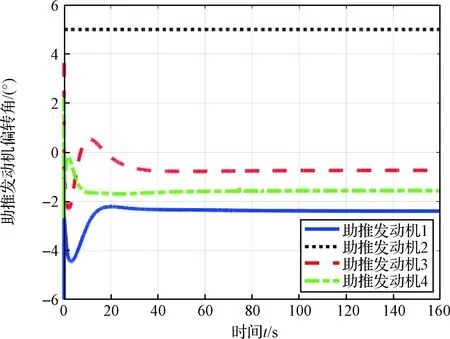
圖7 助推發(fā)動(dòng)機(jī)偏轉(zhuǎn)角度曲線
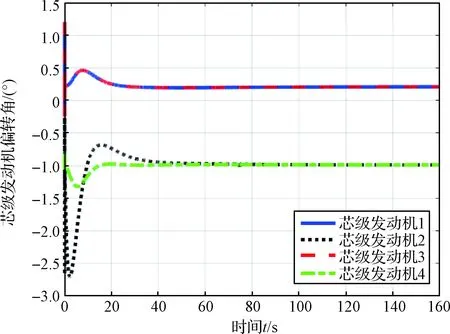
圖8 芯級(jí)發(fā)動(dòng)機(jī)偏轉(zhuǎn)角度曲線
4 結(jié) 論
本文研究了考慮外部干擾和執(zhí)行器卡死故障的運(yùn)載火箭姿態(tài)跟蹤控制問(wèn)題,將執(zhí)行器卡死故障視為廣義干擾,在此基礎(chǔ)上設(shè)計(jì)了基于李雅普諾夫函數(shù)的非奇異終端滑模控制律。所設(shè)計(jì)的控制律使得系統(tǒng)閉環(huán)軌跡快速到達(dá)滑模面并在滑模面上收斂到零。本文通過(guò)修改奇異區(qū)域的控制律,避免出現(xiàn)奇異問(wèn)題。所設(shè)計(jì)的控制律實(shí)現(xiàn)了故障情況下對(duì)運(yùn)載火箭姿態(tài)角精確跟蹤的控制目標(biāo),通過(guò)仿真可以進(jìn)一步校驗(yàn)所得到的結(jié)論。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
汽車(chē)維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
民用飛機(jī)設(shè)計(jì)與研究(2019年2期)2019-08-05 01:33:40
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
汽車(chē)維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車(chē)維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車(chē)維護(hù)與修理(2015年2期)2015-02-28 12:15:39
汽車(chē)與新動(dòng)力(2015年1期)2015-02-27 12:11:01