一種紅外導(dǎo)引頭小型快速伺服穩(wěn)定平臺
2021-01-14 09:22:46王舒雁王春宇
激光與紅外 2020年12期
關(guān)鍵詞:設(shè)計
董 超,王舒雁,劉 科,王春宇,常 曄
(中國空間技術(shù)研究院 北京控制工程研究所,北京 100190)
1 引 言
隨著現(xiàn)代高性能武器系統(tǒng)的發(fā)展,對伺服穩(wěn)定平臺控制系統(tǒng)的控制技術(shù)及控制精度有更高的要求,在精確制導(dǎo)導(dǎo)彈上的應(yīng)用成為非常重要的應(yīng)用領(lǐng)域。本項目的應(yīng)用背景是肩扛式反坦克導(dǎo)彈的紅外導(dǎo)引頭,其主要作用是通過瞄準具人工操作瞄準線運動,鎖定目標并對目標進行跟蹤。伺服穩(wěn)定平臺作為紅外探測器和光學(xué)系統(tǒng)的載體,是精確制導(dǎo)武器的核心部件,其系統(tǒng)響應(yīng)的快速性,穩(wěn)定性和位置的精確性對紅外成像制導(dǎo)的精度有著至關(guān)重要的影響[1]。
結(jié)合光學(xué)系統(tǒng)視場大小和跟蹤視場范圍的要求,伺服穩(wěn)定平臺采用了以MEMS速率陀螺為穩(wěn)定核心,俯仰+偏航的雙框架式結(jié)構(gòu),角度關(guān)系明確,簡單緊湊,兩通道相互獨立、耦合少,方便設(shè)計和控制。利用DSP和FPGA構(gòu)建平臺控制電路,提出了一種電流、速度和位置三環(huán)串級PID改進型算法控制框架電機實現(xiàn)目標鎖定和跟蹤,并通過了轉(zhuǎn)臺試驗驗證。結(jié)果表明,該伺服穩(wěn)定平臺跟蹤范圍廣、快速跟蹤能力強、跟蹤精度高、抗干擾性強。
2 伺服穩(wěn)定平臺結(jié)構(gòu)設(shè)計
為了實現(xiàn)產(chǎn)品小型化和輕量化,同時滿足跟蹤范圍俯仰-40°~+20°,偏航±20°的要求,伺服穩(wěn)定平臺采用了以MEMS速率陀螺為穩(wěn)定核心,俯仰/偏航式雙框架結(jié)構(gòu),如圖1所示,由內(nèi)框和外框組成,分別實現(xiàn)俯仰和偏航方向上的運動控制。兩個框架軸兩端分別安裝力矩電機和絕對位置編碼器,光學(xué)系統(tǒng)安裝在內(nèi)框上,背面安裝速率陀螺。通過內(nèi)框架的速率陀螺敏感兩軸速度信息,內(nèi)外框架的絕對位置編碼器敏感角度信息,內(nèi)外框架上的力矩電機控制角度驅(qū)動框架運動,從而實現(xiàn)平臺上光學(xué)系統(tǒng)光軸的指向不變。
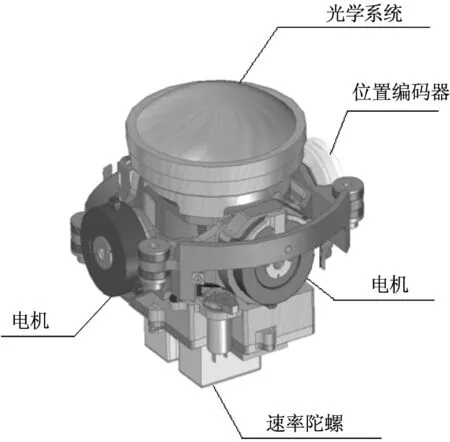
圖1 伺服穩(wěn)定平臺框架結(jié)構(gòu)圖Fig.1 Frame structure of servo stabilized platform
速率陀螺作為伺服穩(wěn)定平臺的核心部件,其性能直接影響穩(wěn)定平臺的控制精度,所以選用MEMS慣性測量單元(IMU),能夠敏感三軸的速度信息,經(jīng)過了零位和靈敏度標定,并在內(nèi)部對全溫范圍進行了補償,精度更高,低噪聲,零偏穩(wěn)定性好,且模塊對振動和沖擊的敏感度很低。
位置編碼器作為測角元件,選用絕對位置式光柵編碼器,其為非接觸式光電工作原理,因此與濕度、溫度、振動等條件無關(guān),體積小,可靠性高,精度高,上電即可讀取當(dāng)前位置,滿足結(jié)構(gòu)尺寸需求。
電機作為驅(qū)動部件,需要綜合考慮平臺的結(jié)構(gòu)尺寸限制和負載力矩要求,選用定制尺寸的有限轉(zhuǎn)角電機,持續(xù)輸出力矩約為60 mN·m,滿足性能需求。
3 伺服穩(wěn)定平臺控制系統(tǒng)設(shè)計
伺服穩(wěn)定平臺的主要作用為:穩(wěn)定光電探測器的光軸,使光軸不受載體運動的影響,保證獲得清晰地圖像;實現(xiàn)光軸預(yù)置功能,將光軸預(yù)訂指向需要的方向,提高目標發(fā)現(xiàn)速度;實現(xiàn)對目標的跟蹤,通過伺服穩(wěn)定平臺控制光軸跟蹤目標視線軸。
為實現(xiàn)上述功能本設(shè)計采用DSP和FPGA構(gòu)建平臺控制電路,以FPGA作為接口,DSP作為控制核心。伺服穩(wěn)定平臺控制系統(tǒng)電路框圖如圖2所示,FPGA讀取MEMS陀螺儀的角速率數(shù)據(jù)、絕對位置編碼器的角度數(shù)據(jù)以及圖像處理后的坐標數(shù)據(jù);伺服DSP讀取電機電流的采集數(shù)據(jù),和FPGA進行數(shù)據(jù)交互獲得控制數(shù)據(jù),完成電機控制算法輸出電機控制PWM信號,經(jīng)由光耦隔離輸出給MOSFET功率驅(qū)動電路,從而控制電機帶動框架運動[2-3]。
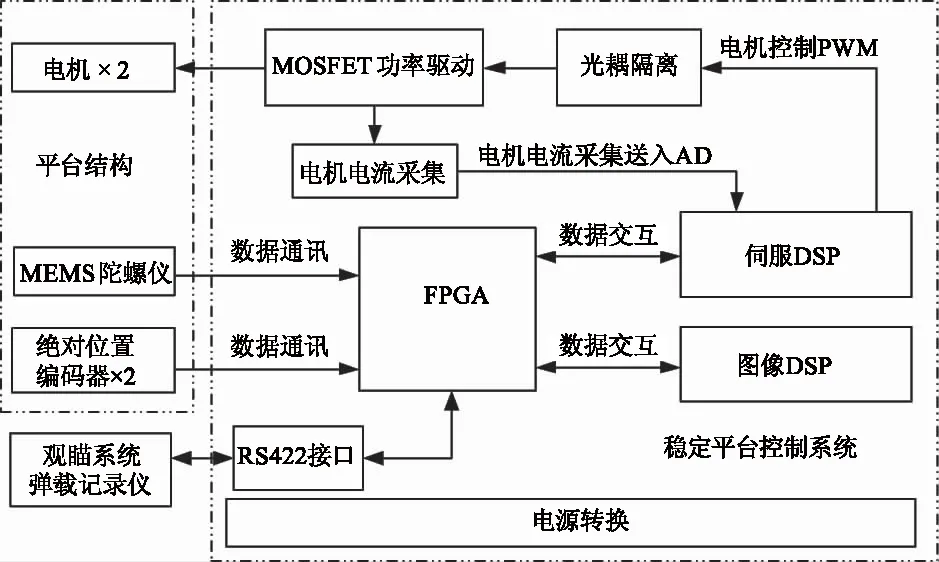
圖2 伺服穩(wěn)定平臺控制系統(tǒng)電路框圖Fig.2 Circuit diagram of servo stabilized platform control system
在實現(xiàn)功能的基礎(chǔ)上,可以得出伺服穩(wěn)定平臺相應(yīng)的主要技術(shù)指標包括預(yù)定精度、穩(wěn)定精度、跟蹤精度、最大跟蹤速度等。而穩(wěn)定精度和跟蹤精度是所有動載體光電成像系統(tǒng)共同關(guān)注的重要問題,也是設(shè)計難點[4]。
穩(wěn)定精度指標代表了穩(wěn)定回路對載體運動的隔離能力。穩(wěn)定精度指標設(shè)計首先要從滿足光電成像系統(tǒng)探測器的性能要求出發(fā),即避免或減小載體運動導(dǎo)致的圖像模糊。同時還要從彈控的要求出發(fā),即伺服穩(wěn)定平臺輸出給彈控的視線角速度不能引起彈體抖動。關(guān)鍵指標為隔離度。
跟蹤精度指標代表了跟蹤回路對運動目標的穩(wěn)定跟蹤能力。跟蹤精度指標設(shè)計要從滿足跟蹤位置精度和跟蹤速度精度兩方面的要求出發(fā),即能快速跟蹤的同時不能造成目標丟失。關(guān)鍵指標為跟蹤回路帶寬。
4 伺服穩(wěn)定平臺控制關(guān)鍵技術(shù)
影響伺服穩(wěn)定平臺隔離度和跟蹤回路帶寬指標的因素主要包含兩個方面:一方面是伺服穩(wěn)定平臺所用的執(zhí)行電機、機械結(jié)構(gòu)件性能、傳感器及控制器元器件的特性,另一方面是伺服穩(wěn)定平臺所采用的控制理論和控制算法,是最大限度發(fā)揮伺服穩(wěn)定平臺各組成部件性能的關(guān)鍵。本設(shè)計的關(guān)鍵技術(shù)為MEMS陀螺的數(shù)據(jù)處理[5]和三環(huán)串級PID控制算法[6]。
4.1 MEMS陀螺的數(shù)據(jù)處理
伺服穩(wěn)定平臺以MEMS陀螺為穩(wěn)定核心,其性能直接影響穩(wěn)定平臺的控制精度,所以在選擇性能較好MEMS陀螺的同時,對陀螺的輸出數(shù)據(jù)也要進行處理,包括剔除野值、濾波和在線零位校準。
(1)剔除野值:陀螺的輸出數(shù)據(jù)由FPGA通過RS422數(shù)字接口接收,采集周期為1 ms,通過對FPGA采集的原始數(shù)據(jù)觀察,數(shù)據(jù)偶爾會受到干擾出現(xiàn)野值,野值不會在短時間內(nèi)連續(xù)出現(xiàn),且野值與正常值的偏差較大,影響電機控制,需要對陀螺數(shù)據(jù)進行實時野值剔除。通過對陀螺試驗發(fā)現(xiàn),當(dāng)電機全速運轉(zhuǎn)時,在相鄰的兩個采集周期陀螺的正常值偏差絕對值不會超過10,因此對相鄰兩個周期的陀螺采集值的偏差絕對值設(shè)置閾值10,當(dāng)超過閾值時,判定后一個周期的陀螺采集值為野值,輸出為前一個周期的采集值。當(dāng)沒有超過閾值時,判定沒有出現(xiàn)野值,輸出為后一個周期的采集值。
(2)濾波:陀螺的數(shù)據(jù)濾波采用了所選MEMS慣性測量單元(IMU)的內(nèi)置濾波器,是帶線性相位補償?shù)腃IC低通濾波器,其本質(zhì)為滑動平均濾波器的一種有效實現(xiàn),通過對其寄存器進行參數(shù)配置選擇不同的截止頻率和延時,帶寬越高,噪聲越大,延時越小。濾波器參數(shù)的配置要對帶寬和噪聲進行綜合考慮,選擇截止頻率為131 Hz,延時3 ms,陀螺數(shù)據(jù)輸出噪聲為0.2 °/s。
(3)在線零位校準:MEMS陀螺儀的一個特點是偏置不穩(wěn)定,造成陀螺初始零位會隨時間漂移,漂移的不良后果就是航向計算的誤差會持續(xù)增加而不減退,同時伺服穩(wěn)定平臺輸出的視線角速度的零位也會隨之發(fā)生偏移。因此,需要對陀螺的零位進行校準。一種有效的校準方案是對陀螺實施零角速度更新,只要知道陀螺處于靜止狀態(tài),便可將陀螺的偏移歸零。零位校準的關(guān)鍵問題是校準的時機,在導(dǎo)引頭處于電鎖狀態(tài)時,陀螺處于靜止狀態(tài),且具有一定程度的抗干擾能力。具體方法為,導(dǎo)引頭上電自檢通過后,通過計算框架是否到達預(yù)置角位置判斷是否進入電鎖狀態(tài),確認進入電鎖狀態(tài)后,采集一段時間內(nèi)陀螺靜止穩(wěn)定的數(shù)據(jù),計算該段數(shù)據(jù)的均值,作為陀螺當(dāng)前狀態(tài)下的零位偏移量,后續(xù)使用陀螺數(shù)據(jù)時均減去這個偏移量,此時零位即得到校準。
4.2 三環(huán)串級PID控制算法
隨著現(xiàn)代高性能武器系統(tǒng)的發(fā)展,對導(dǎo)引頭伺服穩(wěn)定平臺控制系統(tǒng)的控制技術(shù)及控制精度有更高的要求,傳統(tǒng)的單環(huán)或者雙環(huán)控制已經(jīng)不能滿足性能需求。本設(shè)計主要采用了以電流環(huán)和速度環(huán)為內(nèi)環(huán),位置環(huán)為外環(huán)的三環(huán)串級PID控制算法,該算法可以對系統(tǒng)的環(huán)路從內(nèi)到外進行逐步設(shè)計,通過提高某環(huán)路的帶寬,可迅速抑制環(huán)路內(nèi)的干擾,每個部分的設(shè)計都有明確的目標,在系統(tǒng)調(diào)試時可以提高效率,其工作原理框圖如圖3所示。
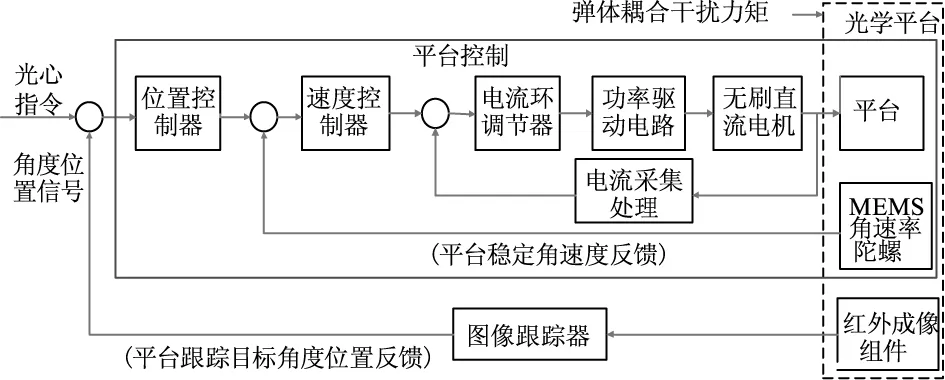
圖3 三環(huán)串級PID控制原理框圖Fig.3 Three loop cascade PID control principle block diagram
導(dǎo)引頭工作于跟蹤狀態(tài)時,伺服系統(tǒng)通過電流采集和陀螺反饋閉合穩(wěn)定回路,隔離載體擾動;通過圖像跟蹤器閉合跟蹤回路,使光軸精確跟蹤視軸的運動。
(1)電流環(huán):電流環(huán)的作用是提高電流的響應(yīng)速度,能夠減小電樞電流在動態(tài)過程中的跳動情況,使電機的控制力矩平穩(wěn)輸出,同時可以提高系統(tǒng)剛度,提升系統(tǒng)的帶寬。電流環(huán)的輸入是速度環(huán)的輸出,反饋是實時采集的電流。
不同于傳統(tǒng)的硬件電流環(huán)設(shè)計,本設(shè)計采用了軟件實現(xiàn)電流環(huán),處理器主頻150 MHz,電流環(huán)控制周期為50 μs,帶寬可以做的更寬,調(diào)試參數(shù)更為方便。對反饋電流的檢測采用了精密電阻和高共模抑制比的電流檢測放大器來實現(xiàn)高邊電流采集,對放大器輸出進行了濾波處理,濾波算法為滑動平均濾波,同時軟件對電流輸出限幅1 A,提升可靠性。
(2)速度環(huán):速度環(huán)的作用是保持視軸的穩(wěn)定,能夠隔離載體的抖動,提高系統(tǒng)的響應(yīng)速度。速度環(huán)的輸入是位置環(huán)的輸出,反饋是MEMS速率陀螺的角速度輸出。
本設(shè)計速度環(huán)在PID算法的基礎(chǔ)上引入了抗積分飽和來調(diào)節(jié)積分環(huán)節(jié)的作用,積分環(huán)節(jié)并不能完全消除系統(tǒng)的穩(wěn)態(tài)誤差,只能根據(jù)控制誤差不斷累加,對控制信號進行補償。這種情況下,控制器輸出有可能會進入飽和區(qū),整個系統(tǒng)陷入短暫失控狀態(tài)。在軟件中每次在積分環(huán)節(jié)累加前,先判斷上一周期的控制量是否超過了最大設(shè)置值,如果超過設(shè)置值,則用設(shè)置值代替當(dāng)前積分累加值,避免控制量長時間停留在飽和區(qū),提高響應(yīng)速度。對MEMS速率陀螺的輸出則采用了上述中的剔除野值、濾波和在線零位校準的處理方式。
(3)位置環(huán):位置環(huán)的作用是實現(xiàn)對圖像中心坐標快速、穩(wěn)定、精確地跟蹤。位置環(huán)的輸入是圖像跟蹤器的目標位置反饋與光心坐標的差值。
本設(shè)計位置環(huán)的輸出既是速度環(huán)的給定輸入,同時也是提供彈控的視線角速度,所以位置環(huán)算法關(guān)鍵在于控制輸出的視線角速度波動。圖像解算需要20 ms的時間,延遲較大,將位置環(huán)控制周期設(shè)置為1 ms,同時在算法中對圖像坐標進行積分線性插值,使在20 ms下一幀圖像坐標輸入時能夠平穩(wěn)控制,視線角速度不會出現(xiàn)較大波動從而影響彈控。同時對輸出給速度環(huán)的跟蹤角速度進行限幅,避免跟蹤角速度過大造成圖像模糊。
5 試驗驗證
紅外導(dǎo)引頭產(chǎn)品通過了仿真和轉(zhuǎn)臺試驗的驗證,在試驗過程中伺服穩(wěn)定平臺的隔離度和跟蹤回路帶寬都滿足設(shè)計指標要求。隔離度設(shè)計指標要求為小于5 %,測試結(jié)果最大為3.8 %;跟蹤回路帶寬設(shè)計指標要求為2 Hz,測試結(jié)果為2 Hz。
隔離度測試:將導(dǎo)引頭固定在轉(zhuǎn)臺上,目標源不動,轉(zhuǎn)臺以(3°,3 Hz)正弦擺動模擬載體抖動,測量輸出視線角速度,如圖4和圖5所示。
跟蹤回路帶寬測試:將目標源固定在轉(zhuǎn)臺上,導(dǎo)引頭不動,轉(zhuǎn)臺以(1°,2 Hz)正弦擺動,測量輸出視線角速度與轉(zhuǎn)臺角速度,如圖6和圖7所示。
圖4 干擾3°,3 Hz下的偏航視線角速度Fig.4 Yaw LOS angular velocity under disturbance 3°,3 Hz
圖5 干擾3°,3 Hz下的俯仰視線角速度Fig.5 Pitch LOS angular velocity under disturbance 3°,3 Hz
圖6 跟蹤1°,2 Hz的偏航視線角速度Fig.6 Yaw LOS angular velocity of tracking 1°,2 Hz
圖7 跟蹤1°,2 Hz的俯仰視線角速度Fig.7 Pitch LOS angular velocity of tracking 1°,2 Hz
6 結(jié) 論
本文針對紅外導(dǎo)引頭伺服穩(wěn)定平臺小型化和快速穩(wěn)定設(shè)計需求,采用了以MEMS速率陀螺為穩(wěn)定核心,俯仰/偏航式雙框架結(jié)構(gòu),利用DSP和FPGA構(gòu)建平臺控制電路,提出了一種電流、速度和位置三環(huán)串級PID改進型控制算法,實現(xiàn)了產(chǎn)品小型化設(shè)計,并對產(chǎn)品進行了轉(zhuǎn)臺試驗驗證,隔離度為3.8 %,跟蹤回路帶寬為2Hz,提高了產(chǎn)品的快速穩(wěn)定性和控制精度,滿足了設(shè)計需求。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04