基于歐氏距離的無人艇載毫米波雷達點跡凝聚方法
2021-01-16 05:18:12李瑞偉李立剛金久才劉德慶李方旭戴永壽
水下無人系統學報 2020年6期
李瑞偉, 李立剛, 金久才, 劉德慶, 李方旭, 戴永壽
基于歐氏距離的無人艇載毫米波雷達點跡凝聚方法
李瑞偉1, 李立剛2*, 金久才3, 劉德慶3, 李方旭2, 戴永壽2
(1. 中國石油大學(華東) 控制科學與工程學院, 山東 青島, 266580; 2. 中國石油大學(華東) 海洋與空間信息學院, 山東 青島, 266580; 3. 自然資源部第一海洋研究所, 山東 青島, 266061)
毫米波雷達在工作中會存在虛警和目標點跡分裂等問題。當前多數研究均通過處理雷達回波, 根據波形特征降低虛警, 但結果中仍存在無效點跡; 通過依次比較點跡距離和角度等多維信息判斷其是否屬于同一目標, 方法過程較為繁瑣, 且表示目標狀態常用的質心法不夠準確。因此文中提出一種基于歐氏距離的點跡凝聚方法, 通過對雷達點跡數據進行處理解決了虛警和目標點跡分裂問題。首先, 結合雷達回波強度和有效檢測范圍等先驗知識, 采用閾值濾波法去除無效點跡。然后, 依據“屬于同一個目標的點跡速度相同、距離相近”這一規律, 通過歐氏距離度量點跡間的信息相似度, 實現目標點跡聚類。最后, 計算障礙目標的位置和截面寬度等信息, 以矩形危險區域表示障礙目標所屬范圍, 從而實現無人艇前方障礙目標的準確檢測。實船試驗驗證了文中方法的有效性。
無人艇; 毫米波雷達; 障礙目標檢測; 點跡凝聚
0 引言
無人艇是一種新型水面無人平臺, 具有體積小、靈活自主等優點, 逐漸在水質檢測、偵查取證及海上搜救等應用領域引起廣泛關注。海面障礙物的準確檢測是實現無人艇自主作業的前提。毫米波雷達通過發射1~10 mm電磁波對目標進行檢測, 精度高且受光線等環境因素的干擾較小, 應用于無人艇前方障礙目標檢測具有顯著優勢。由于雷達檢測波束有一定寬度[1], 檢測波束掃過目標時, 一個目標可能會反射多個回波, 導致雷達將其誤識為多個目標, 輸出多個目標點跡, 進而造成目標點跡分裂的問題。此外, 受風浪干擾, 雷達隨無人艇俯仰晃動時會檢測到海面并將其誤識別為障礙目標, 輸出無效目標點跡, 造成虛警。
目前, 以無人艇自主避碰為應用背景的毫米波雷達海面障礙目標檢測方法較少, 通常采用點跡凝聚的方法[1]解決虛警和點跡分裂問題。其中, 針對虛警問題, 當前大多數研究均在回波層, 通過對雷達回波進行處理, 采用恒虛警檢測[2]等方法, 根據波形特征等降低虛警, 但處理效果有限, 雷達檢測結果中仍存在無效點跡, 而且在采購成品雷達后, 雷達回波也并不容易獲取; 在數據層, 通常采用閾值濾波法[3], 通過對點跡的距離等關鍵信息設置有效范圍, 來濾除無效目標點跡, 該方法原理簡單, 易于實現, 可有效地進一步抑制虛警。針對目標點跡分裂問題, 通常采用點跡聚類方法劃分屬于同一目標的點跡, 常用的聚類方法有均值法、基于密度的聚類算法(density-based spatial clustering of applications with noise, DBSCAN)等。其中均值法必須預知目標數量[4-5], 顯然難以滿足當前需求。DBSCAN法認為只有某區域內點跡密度達到一定閾值時點跡有效[6], 容易造成目標丟失。
如何判斷不同點跡是否屬于同一目標是實現點跡聚類的關鍵環節, 目前主流方法通過依次比較點跡距離和角度等多維信息進行判斷[6-9], 每次判斷需多次比較, 較為繁瑣。采用基于點跡信息相似度的方法可有效簡化判斷過程, 常見的相似度度量有歐幾里德距離和曼哈頓距離等。曼氏距離常用于度量路徑差異, 而歐氏距離常用于度量空間中兩點間的直線距離, 用于度量點跡信息相似度更加準確。
在點跡完成聚類后, 通常采用質心法[8-12]1.91.101.11根據點跡信息計算各目標的位置、距離和角度等信息, 該方法較簡單, 但無法獲取目標最近距離及所屬區域范圍等信息, 計算結果在近距離(200 m)無人艇避碰應用中顯然不夠完整和準確。
綜上所述, 現有方法在無人艇避碰應用背景下尚存不足, 為此文中提出了基于歐氏距離的雷達目標點跡凝聚(plots-centroid based on Euclideansistance, PCBED)方法, 以實現海面障礙物的準確檢測, 為無人艇避碰和路徑規劃準確提供前方障礙目標的相對距離、角度、速度和橫向和縱向截面寬度等信息。
1 基于歐氏距離的點跡凝聚方法
首先, 采用閾值濾波法濾除無效目標點跡。然后, 依據“屬于同一個目標的點跡速度值相同、距離相近”的規律, 通過歐氏距離度量點跡間的信息相似度, 實現目標點跡聚類。最后, 計算目標距離、角度、速度和寬度等信息, 并以矩形危險區域表示目標所屬范圍。
1.1 數據獲取與預處理
將雷達安裝于船艏, 檢測無人艇前方障礙目標, 可實時獲取目標點跡的相對距離()、角度()、徑向速度()、雷達散射截面()和位置(,)等信息。通過觀察分析大量試驗數據, 結合毫米波雷達檢測原理, 可以得出無效目標點跡具有以下特點: 其、、值可能會超出雷達有效檢測范圍; 無效目標點跡對應的回波強度通常較低, 因此其值較低。根據上述特點, 采用閾值濾波法去除無效目標點跡, 具體如下: 設置、、及閾值, 確定信息有效范圍, 即當點跡的、、及值不滿足以下條件時, 則該點跡將被視為無效目標點跡濾除。
式中:min0、min0、min0、max0、max0和max0分別為相對距離、角度、速度的最小閾值和最大閾值, 具體數值根據所用毫米波雷達的性能指標設置;0為雷達散射截面最小閾值, 具體數值應結合應用場景經試驗分析設定。
由于從雷達得到的點跡數據未按距離排序, 此時按文中方法的聚類過程處理亂序目標點跡時, 容易導致聚類失敗, 即一個目標被錯誤處理為多個目標。為了減少上述情況的發生, 按照目標點跡的相對距離, 由近及遠對所有目標點跡進行重排列, 得到一組新的有序目標點跡。
1.2 目標點跡聚類
目標點跡聚類即通過數據處理將屬于同一目標的點跡進行有效劃分。依據“屬于同一個目標的點跡速度值相同、距離相近”這一規律, 根據目標點跡的速度和位置信息, 計算點跡之間的歐氏距離, 用其度量點跡之間的信息相似度[13], 并據此對目標點跡進行聚類處理, 流程如圖1所示。
首先, 獲取預處理后的目標點跡數據, 建立目標點跡集與空目標集,且
式中:為目標點跡集中的點跡序號;為目標集中的目標序號, 將屬于目標的點跡稱為目標的“成員點跡”;為成員點跡序號。
生成新目標并將首個點跡設定為該目標的成員點跡, 即
然后, 依次計算第1個目標所有成員點跡1p與下一目標點跡D的歐氏距離, 用其度量兩點跡間的數據信息相似度,值越小, 則兩點跡的信息相似度越高, 反之亦然。標準歐氏距離

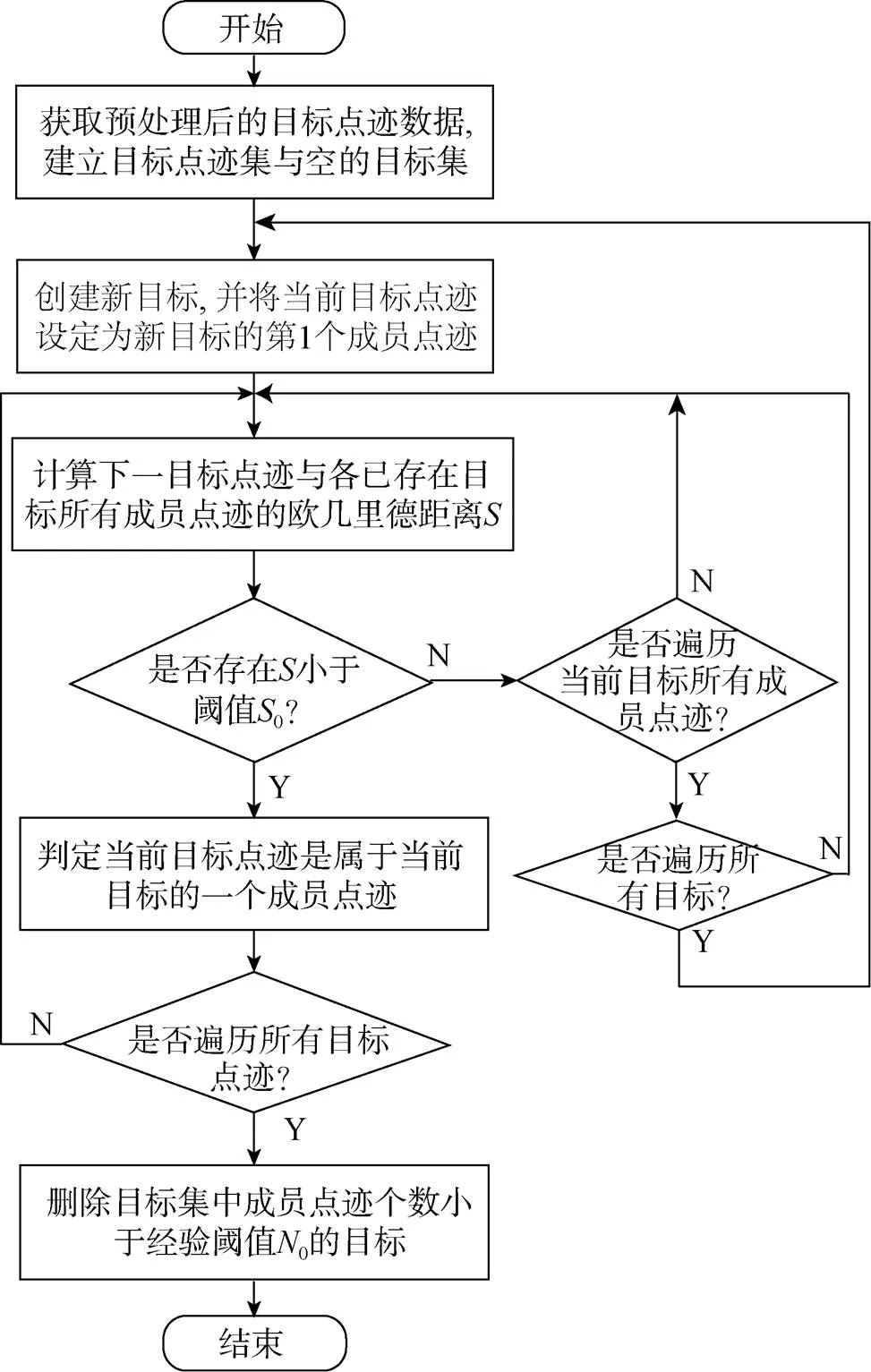
圖1 目標點跡聚類流程圖
式中,、和分別為點跡的橫向距離、縱向距離和徑向速度值。
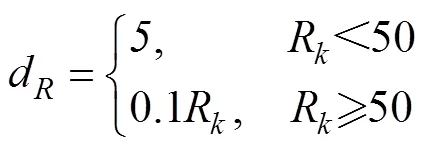
由于計算歐氏距離時使用了位置和徑向速度2種不同量綱的信息, 而且當無人艇以某一角度與大型障礙目標接近時, 可能造成同一目標的點跡徑向速度值差異較大, 此時直接采用式(4)將會造成較大誤差。針對上述問題, 首先采用閾值化方法對位置和速度指標進行無量綱化處理, 然后在計算歐氏距離時為點跡速度信息設置衰減系數,在10~100 m內隨點跡距離減小而減小, 從而在一定程度上降低隨著目標的靠近同一目標點跡徑向速度值不同帶來的影響, 即
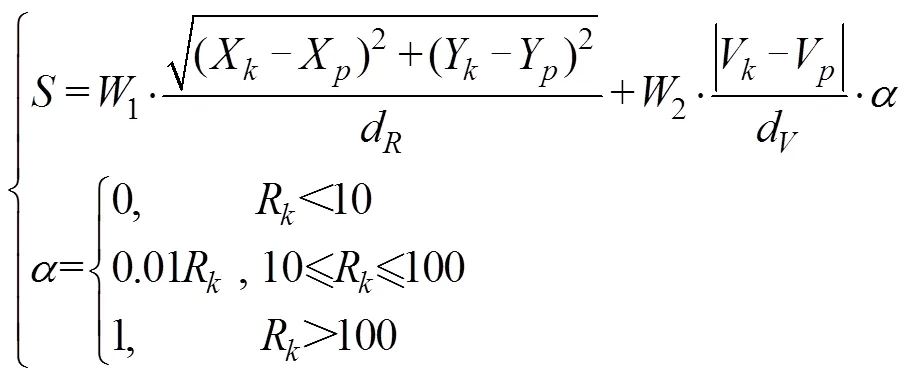
式中:1、2為位置和速度指標在計算歐氏距離時所占權重, 分別取值0.7和0.3;d、d分別為位置差異和速度差異的閾值,d=2 m/s, 而由于隨著探測距離增大, 雷達分辨率會逐漸降低, 同時考慮無人艇自主避碰的安全性等因素,d取值為
判斷是否存在<1, 若是, 則認為該目標點跡是屬于該目標的一個成員點跡, 繼續按上述過程處理下一目標點跡; 若否, 則計算下一目標所有成員點跡與該目標點跡的歐氏距離, 進行上述判定; 若遍歷所有已存在目標仍無法將該目標點跡劃分, 則在目標集生成新目標, 并將該點跡設定為新目標的第1個成員點跡。循環上述過程, 直至遍歷所有目標點跡。
最后, 將目標集中成員點跡個數小于經驗閾值0的目標視為虛假目標, 刪除此類目標, 降低離散點跡對檢測結果的影響。
通過上述過程, 能夠遍歷所有目標點跡, 將屬于不同目標的點跡進行區分, 將屬于同一目標的點跡實現聚類。
1.3 目標信息計算與表示
由于無人艇自主避碰不僅需要獲取前方障礙目標的距離、角度和速度, 還必須得到障礙目標的寬度等信息, 因此采用主流方法質心法獲取的障礙目標信息在無人艇近距離避碰應用中顯然不夠完整和準確。文中根據各目標所包含的成員點跡信息, 計算相應目標的最近距離、角度、速度和橫向、縱向截面寬度等信息, 并得到一個矩形危險區域來表示障礙目標所屬范圍。
假設目標包含成員點跡數量為, 則根據各成員點跡信息計算目標的信息
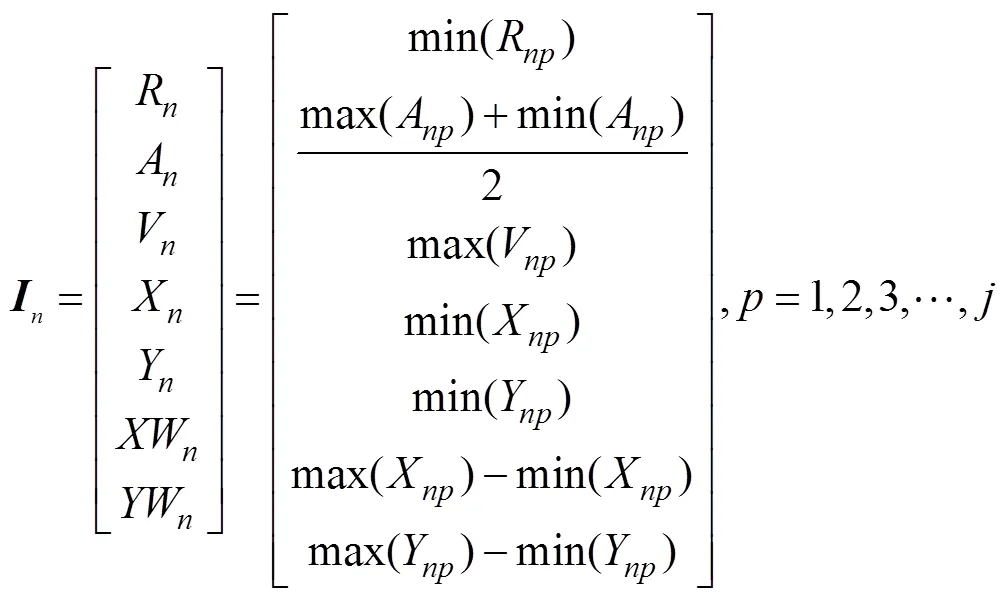
式中:R,A和V表示目標的距離, 角度和速度; (X,Y)表示目標所屬矩形危險區域的左下角位置;XW和YW分別表示目標矩形危險區域的橫向、縱向截面寬度, 考慮安全性, 設置最小目標寬度值0, 若目標寬度值小于0, 則令其等于0。
2 實船試驗與結果分析
為驗證PCBED法在工程應用中的有效性, 通過實船試驗, 選取多個不同試驗場景, 并采用PCBED法(方法1)和常用的基于DBSCAN聚類的點跡凝聚方法(方法2)分別對各試驗場景獲取的目標點跡數據進行二次處理, 對比分析文中方法應用于障礙目標檢測的有效性和準確性。
2.1 試驗準備及過程
該試驗在1~2級海況下進行, 地點為青島膠州灣海域, 共有4處試驗場景。3種被測目標分別為: 小型皮劃艇、小型漁船和大型輪船。試驗中, 為使雷達保持穩定, 保證試驗數據的可靠性, 試驗船以低速行駛靠近被測目標, 獲取檢測數據。經調研, 試驗選用德國 Continental公司的ARS408-21型77 GHz長距離毫米波雷達。該雷達采用快斜率調頻連續波體制, 檢測范圍可達200 m(20o~120o), 測距精度為0.1~0.4 m, 檢測周期為70 ms。將毫米波雷達安裝于船艏位置, 距海平面高度約1.5 m, 通過計算機控制毫米波雷達開啟, 獲取各試驗場景中本船前方障礙目標點跡信息并進行實時處理。
試驗前對方法中涉及的各個閾值參數進行設定: 根據雷達性能說明書設置min0=0,max0=200,min0=-60,max0=60,min0=-40,max0=25,0=3, 其中速度值的正負分別代表目標遠離和靠近; 考慮無人艇避碰安全距離等因素設置0=3。0設置過小會導致濾除效果較差, 過大容易造成漏檢, 因此對其進行合理設定最為關鍵。在車載雷達中0參考值為0, 即值正負分別代表點跡有效和無效。但海上障礙目標類型、材質等更加多樣復雜, 采用該值相對過大, 易濾除有效點跡, 造成漏檢。因此從各類目標中分別隨機選取若干不同目標的300個點跡, 統計其值分布情況, 如表1所示。
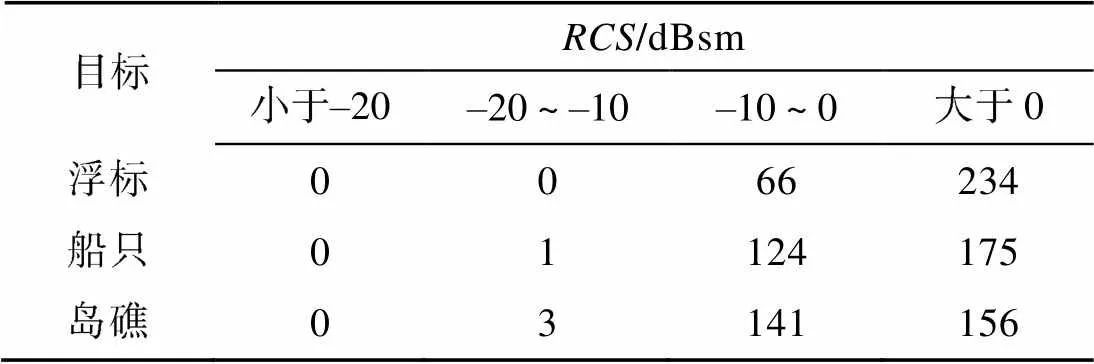
表1 海面障礙目標RCS值分布表
顯然, 各類目標點跡的值基本大于–10 dBsm, 因此設置0=–10 dBsm。
2.2 試驗結果
在4個試驗場景的檢測結果中均存在以下問題: 盡管試驗船低速行駛, 行駛過程中仍不可避免地產生俯仰運動, 導致毫米波雷達會檢測到海面并將其誤識別為目標, 從而檢測結果存在無效目標點跡, 同時, 受雷達分辨率等因素影響, 有效目標會被分裂為多個目標點跡。以2種點跡凝聚方法分別對4處試驗場景獲取的目標點跡數據進行凝聚處理, 具體結果如下。
1) 試驗一: 被測目標為前方70 m外一艘小型皮劃艇, 試驗船與其相對徑向速度約為–2 m/s, 試驗場景及雷達原始目標點跡如圖2所示。
通過圖2可以看出, 被測目標在原始目標點跡圖中表現為6個點跡, 圖中存在3個無效目標點跡, 分別采用2種點跡凝聚方法對本幀數據進行處理, 效果如圖3所示。通過2種點跡凝聚方法所得目標信息如表2所示。
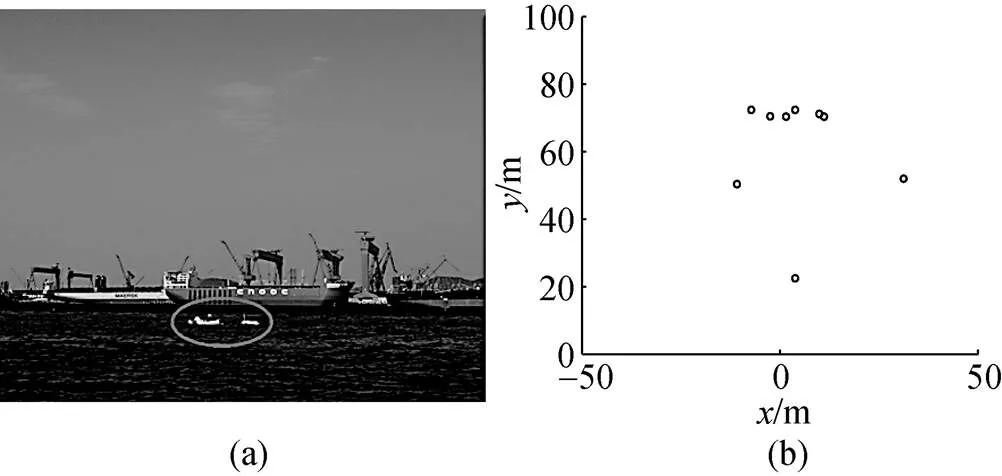
圖2 試驗一場景及雷達原始目標點跡圖
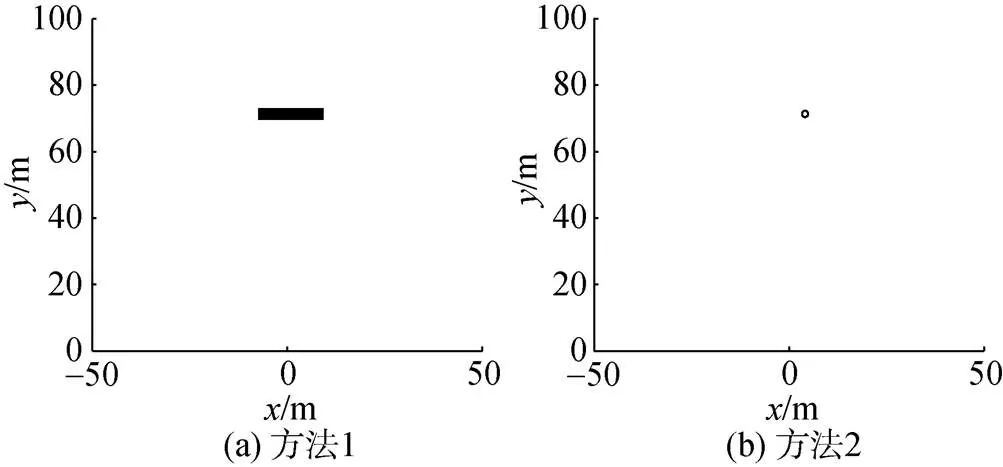
圖3 試驗一數據處理效果圖

表2 試驗一計算所得目標信息
通過對比試驗結果可知, 2種方法均對目標信息進行較為準確的計算, 而方法1可獲取目標最近距離、最高速度以及目標寬度等信息, 能夠在無人艇進行自主避碰時進一步提高安全性。
2) 試驗二: 被測目標為前方15 m以外一艘小型漁船, 本船與其相對徑向速度約為–1 m/s試驗場景及雷達原始目標點跡如圖4所示。
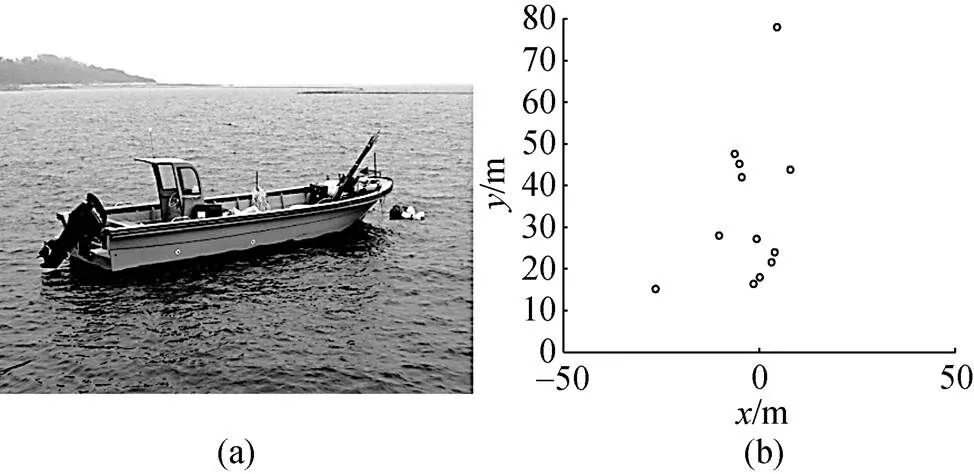
圖4 試驗二場景及雷達原始目標點跡圖
通過圖4可以看出, 原始目標點跡圖中除目標船返回的4個點跡外, 還存在大量無效目標點跡, 分別采用2種點跡凝聚方法對本幀數據進行處理, 效果如圖5所示。通過2種點跡凝聚方法所得目標信息如表3所示。通過對比試驗結果可知, 方法2所得的目標1實際為虛假目標, 而針對虛警問題, 方法1通過數據預處理及聚類后刪除離散點跡雙重處理, 有效濾出了虛假目標。
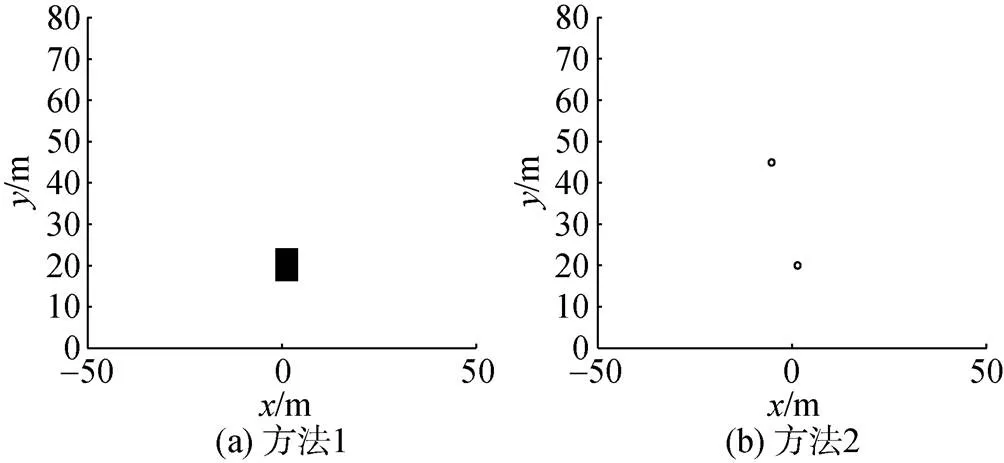
圖5 試驗二數據處理效果圖
3) 試驗三: 被測目標為前方80 m以外一艘大型輪船, 試驗船與其相對徑向速度約為–2 m/s試驗場景及雷達原始目標點跡如圖6所示。
通過圖6可以看出, 被測大型輪船返回了大量點跡, 分別采用2種點跡凝聚方法對本幀數據進行處理, 效果如圖7所示。通過2種點跡凝聚方法所得目標信息如表4所示。

表3 試驗二計算所得目標信息
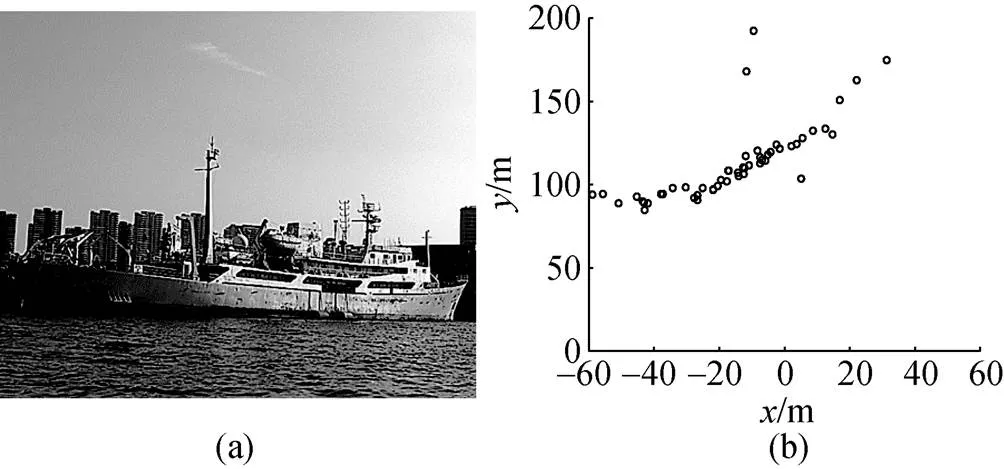
圖6 試驗三場景及雷達原始目標點跡圖
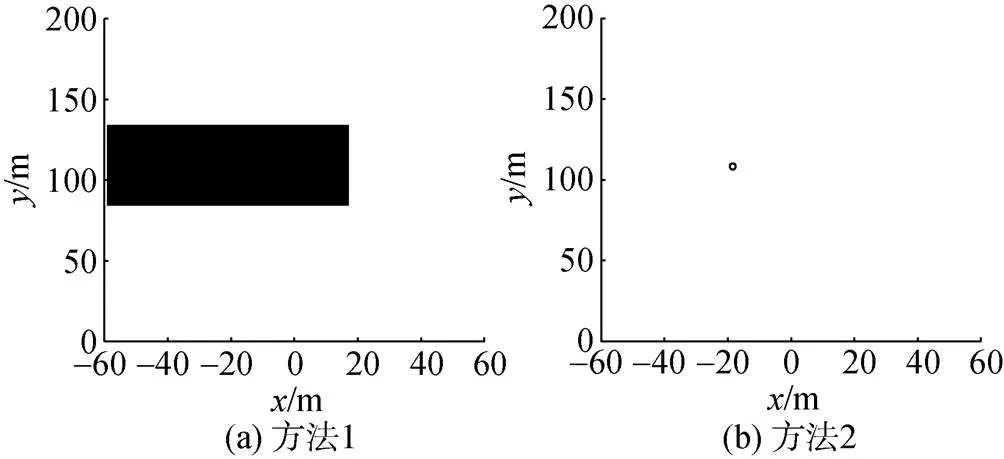
圖7 試驗三數據處理效果圖

表4 試驗三計算所得目標信息
通過試驗結果可知, 相對方法1而言, 盡管方法2計算得出了目標的質心距離、角度和速度等信息, 但在無人艇進行自主避碰及路徑規劃時該結果顯然不能代表目標實際情況, 甚至嚴重威脅本船安全。
4) 試驗四: 實驗船緩慢行駛與試驗三被測大型輪船不斷靠近至30 m左右, 實際速度約–3 m/s, 點跡的徑向速度檢測值為–2.75~0 m/s, 試驗場景及雷達原始目標點跡如圖8所示。
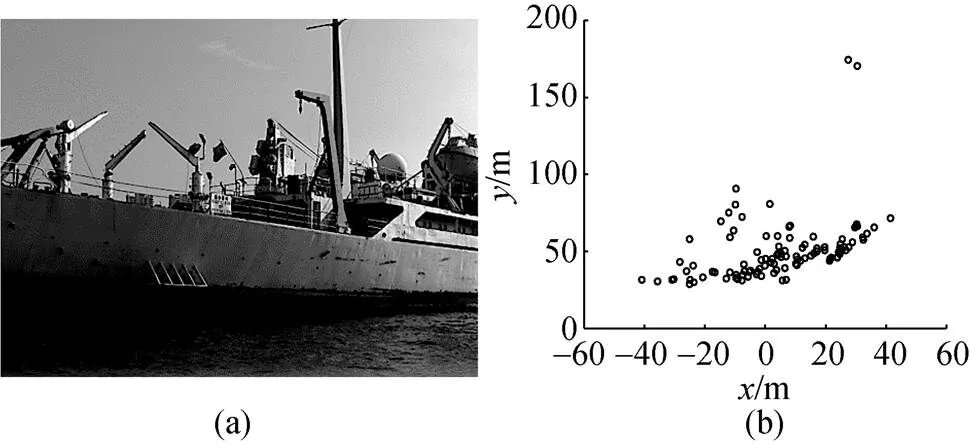
圖8 試驗四場景及雷達原始目標點跡圖
分別采用2種點跡凝聚方法對本幀數據進行處理, 效果如圖9所示。
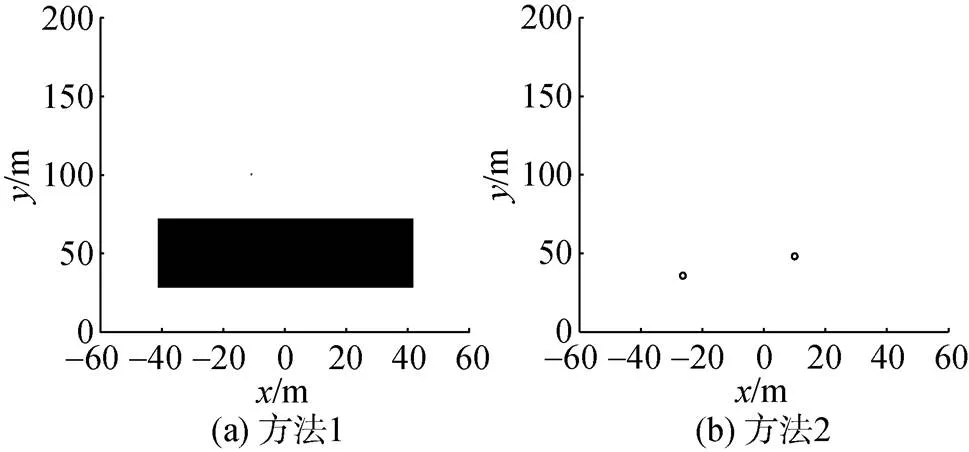
圖9 試驗四數據處理效果圖
通過2種點跡凝聚方法所得目標信息如表5所示。
當試驗船與大型目標靠近時會導致屬于同一目標的點跡速度值不同, 影響聚類效果。通過試驗結果可知, 在計算歐氏距離時為速度設置與距離相關的衰減系數, 有效解決了上述問題。

表5 試驗四計算所得目標信息
2.3 試驗結果分析
通過對比不同場景下2種方法效果可得: PCBED法有效濾除了大量虛假目標點跡, 降低虛警; 基于歐氏距離實現點跡聚類, 解決了不同大小目標的點跡分裂問題; 計算獲得了目標的最近距離、角度、速度和橫向、縱向截面寬度, 并以矩形危險區域表示障礙目標的所屬范圍, 所得信息較為全面, 有效提高了檢測結果的準確性, 保證了無人艇的安全。
3 結束語
針對毫米波雷達應用于無人艇前方海面障礙目標檢測存在的虛警和目標點跡分裂問題, 文中提出了PCBED法, 能夠有效提高雷達檢測結果的準確性。采用閾值濾波法濾除了無效目標點跡, 同時能夠降低數據量, 提高后續數據處理的效率; 通過計算歐氏距離度量點跡間信息相似度的方式判定點跡是否屬于同一目標, 簡化了目標點跡聚類過程; 得到了目標的位置、速度和橫向、縱向截面寬度等信息, 以矩形危險區域表示障礙目標的所屬范圍, 為無人艇自主避碰提供更完整、準確的障礙物信息。
PCBED法是基于單幀檢測數據的處理, 在下一步研究中, 可根據“同一目標在多幀檢測數據中存在關聯”進行展開, 通過處理連續多幀檢測數據, 進一步提高檢測結果的有效性和準確性。
[1] 劉美云. 一種基于兩坐標搜索雷達的點跡凝聚算法[J]. 科學技術創新, 2018(24): 60-61.
[2] 孫元, 孫梧雨, 韋家軍, 等. 基于恒虛警檢測的汽車主動防撞毫米波雷達信號處理算法[J]. 兵工自動化, 2017, 36(9): 45-49.Sun Yuan, Sun Wu-yu, Wei Jia-jun, et a1. CFAR Based Signals Processing of Millimeter-wave Radar for Automotive Anti-collision[J]. Ordnance Industry Automation, 2017, 36(9): 45-49.
[3] Liu Y Y, Gao S W, Wang J, et a1. Design and Implementation of Target Detection System for Miniature Intelligent Vehicles[J]. Journal of Beijing University of Technology, 2016, 42(10): 1509-1518.
[4] 何佩佩, 唐霜天, 匡華星. 一種基于層次劃分聚類的雷達信號分選算法[J]. 現代防御技術, 2016, 44(4): 51-55.He Pei-pei, Tang Shuang-tian, Kuang Hua-xin. A Radar Signal Sorting Algorithm Based on Hierarchical Clustering[J]. Modern Defence Technology, 2016, 44(4): 51-55.
[5] 張什永, 張海黎, 胡澤賓, 等. 基于聚類分析的雷達信號分選研究[J]. 航天電子對抗, 2013, 29(1): 49-52.Zhang Shi-yong, Zhang Hai-li, Hu Ze-bin, et al. Research on Clustering-based Radar Signal Sorting[J]. Aerospace Electronic Warfare, 2013, 29(1): 49-52.
[6] 王曉峰, 張國毅, 王然. 一種新的未知雷達信號快速分選方法[J]. 電子信息對抗技術, 2011, 26(5): 19-22.Wang Xiao-feng, Zhang Guo-yi, Wang Ran. A New Method of Unknown Radar Signals Sorting[J]. Electronic Information Warfare Technology, 2011, 26(5): 19-22.
[7] 劉志英. 基于TS-201的三坐標雷達點跡處理器的設計與實現[J]. 信息技術與信息化, 2012(1): 79-81.Liu Zhi-ying. The Design and Implementation of Plot Acquisition Processor for 3D Radar Based on TS-201[J]. Information Technology and Informatization, 2012(1): 79-81.
[8] 吉軍. 雷達點跡的目標智能特征提取方法研究[J]. 信息技術, 2013(6): 83-87.Ji Jun. Intelligent Radar Point Target Trace Feature Extraction Method[J]. Information Technology, 2013(6): 83-87.
[9] 周釔辛. 基于多維特征數據信息的點跡凝聚算法[J]. 工程技術(文摘版), 2017(9): 96-97.
[10] Ruoskanen J, Eskelinen P, Heikkila H. Target Detection Trials with a Millimeter Wave Radar System[J]. IEEE Aerospace and Electronic Systems Magazine, 2003, 18(11): 26-30.
[11] 韓俊峰, 寧軍. 一種三坐標雷達的點跡凝聚處理方法[J]. 現代導航, 2011(5): 363-366.Han Jun-feng, Ning Jun. A Plots Centriod Method of Three Dimension Radar[J]. Modern Navigation, 2011(5): 363-366.
[12] 熊毅, 張承志. VxWorks平臺下的米波雷達點跡凝聚方法研究[J]. 雷達科學與技術, 2009, 7(6): 47-50, 55.Xiong Yi, Zhang Cheng-zhi. A Plot Clotting Approach of Meter Wave Radar Based on VxWorks[J]. Radar Science and Technology, 2009, 7(6): 47-50, 55.
[13] Wang X, Xu L H, Sun H B, et al. On-Road Vehicle Detection and Tracking Using MMW Radar and Monovision Fusion[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(7): 2075-2084.
Plots-Centroid Method for USV-Borne Millimeter-Wave Radar Based on Euclidean Distance
LI Rui-wei1, LI Li-gang2*, JIN Jiu-cai3, LIU De-qing3, LI Fang-xu2, DAI Yong-shou2
(1. College of Control Science and Engineering, China University of Petroleum(East China), Qingdao 266580, China; 2. College of Ocean and Space Information, China University of Petroleum(East China), Qingdao 266580, China; 3. Laboratory of Marine Physics and Remote Sensing, First Institute of Oceanography, Ministry of Natural Resources, Qingdao 266061, China)
To solve the problems of false alarm and target-plot splitting of millimeter-wave(MMW) radar used in the detection of obstacles in unmanned surface vessels(USVs) on the sea, most recent studies have reduced false alarms by processing radar echo based on waveform characteristics. These studies have also compared multi-dimensional information such as the distance and angle of plots to determine whether the plots belong to the same target, this studies are cumbersome. And the centroid methods are not sufficiently accurate to represent the target state. Therefore, this study proposes a plots-centroid method based on Euclidean distance that solves the problems of false alarm and target-plot splitting by processing radar plot data. First, using prior knowledge related to radar echo intensity and effective detection range, a threshold filtering method is used to remove invalid plots. Then, based on the rule stating that plots belonging to the same target have the same speed and close distance, the Euclidean distance is used to measure the similarity of information between plots. Finally, target-plot clustering is realized. Finally, the position and section width of the obstacle target are calculated, where the range of the obstacle target is denoted by a rectangular dangerous area to enable accurate detection of the obstacle target in front of the USV. The effectiveness of this method is verified by an actual ship test conducted.
unmanned surface vessel(USV); millimeter-wave radar; obstacle target detection; plots-centroid
李瑞偉, 李立剛, 金久才, 等. 基于歐氏距離的無人艇載毫米波雷達點跡凝聚方法[J]. 水下無人系統學報, 2020, 28(6): 604-610.
TJ630; U674.91; TN959.1
A
2096-3920(2020)06-0604-07
10.11993/j.issn.2096-3920.2020.06.003
2020-05-16;
2020-07-29.
國家重點研發計劃(2017YFC1405203); 中央高校基本科研業務費專項資助(19CX05003A-1).
李立剛(1976-), 男, 博士, 副教授, 主要研究方向為無人船智能信息處理技術.
(責任編輯: 許 妍)
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中華手工(2017年2期)2017-06-06 23:00:31
海峽科技與產業(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中外會展(2014年4期)2014-11-27 07:46:46
祝您健康(1987年3期)1987-12-30 09:52:32