一種滑動后向遞推的EKF純方位目標跟蹤方法
2021-01-16 05:34:08王明洲
水下無人系統學報 2020年6期
關鍵詞:方法
鄭 藝, 王明洲
一種滑動后向遞推的EKF純方位目標跟蹤方法
鄭 藝, 王明洲
(中國船舶重工集團公司 第705研究所, 陜西 西安, 710077)
由于只有一個觀測點且只能獲取目標方位信息, 被動的單站純方位水下目標跟蹤是定位跟蹤領域的難點之一。在工程應用中有時存在觀測時間短、數據量小的情況, 進一步加大了定位跟蹤的難度。基于此, 文中研究了常規擴展卡爾曼濾波(EKF)原理, 分析了其在單站純方位目標跟蹤中狀態估計變化的特點, 并通過公式推導進行了證明。針對短時觀測、小數據量的特殊背景, 提出了一種滑動后向遞推的EKF方法, 通過后向遞推與正向遞推的結合, 增加對數據的反復利用, 降低了估計誤差。仿真試驗結果證明, 在不同觀測噪聲、不同噪聲協方差估計的情況下, 對于短時觀測小數據量下的單站純方位目標跟蹤, 文中方法比常規EKF方法具有更低的誤差。
水下目標跟蹤; 后向遞推; 擴展卡爾曼濾波; 純方位; 短時觀測
0 引言
水下單站純方位的被動目標跟蹤僅利用單個觀測站在隱蔽的狀態下對目標進行定位跟蹤, 從而實現秘密的行動策劃與目標打擊, 是水下無源定位跟蹤領域熱點方法之一[1]。但由于只有一個觀測站且只能獲取目標方位信息, 水下單站純方位目標跟蹤也是最具挑戰性的方法之一[2]。在實際應用場景中, 有時會存在目標運動速度快、觀測時間短、觀測數據量少的情況, 因此如何在較短的觀測時間中實現快速收斂并降低估計誤差, 是單站無源定位跟蹤領域亟待解決的難點之一。
水下單觀測站的純方位目標定位利用測向交叉定位原理, 反映了一種非線性濾波問題[3]。針對這一類問題, 下列基于貝葉斯原理的遞推類濾波方法得到廣泛運用: 擴展卡爾曼濾波(extended Kalman filter, EKF)[4]通過對非線性方程進行1階泰勒級數展開, 從而逼近真實的狀態分布; 無跡卡爾曼濾波(unscented Kalman filter, UKF)[5]根據確定性采樣方法, 通過無跡變換來獲取目標的后驗均值和協方差分布; 容積卡爾曼濾波(cubature Kalman filter, CKF)[6]通過三自由度球面-徑向容積規則構建, 將非線性濾波看作非線性函數與高斯概率密度乘積的積分求解問題; 粒子濾波(particle filter, PF)[7]在每個時刻通過加權粒子集來估計目標的均值和標準協方差, 其缺點在于運算量大。近年來, 由這類算法衍生的一些算法也得到了學者們的關注, 例如: 通過一些特定的規則加入調整系數對算法進行改進的方法[8]; 基于QR分解的平方根類濾波算法[9-10]; 結合自適應算法對噪聲統計進行估計的改進方法[11-12]; 基于粒子群優化方法的改進算法[13-14]。這些算法存在一個共同問題[15], 就是由于后續估計是通過前值遞推所得, 前值的誤差會對后續濾波結果造成持續影響。在短時觀測、小數據量的情形下, 引入的誤差難以快速消除, 狀態估計前值對后值的影響效應更為明顯。
文中根據分析EKF濾波中狀態估計的變化特點, 提出一種基于滑動后向遞推的EKF(sliding backward recursive-EKF, SBR-EKF)初值優化方法, 在不需要增加新的觀測量的前提下, 利用現有的觀測數據后向濾波, 通過前后雙向的遞推對目標狀態進行估計。仿真結果表明, 該方法可以加快算法收斂速度, 降低估計誤差, 得到更精確的目標狀態估計值。
1 基于EKF的單站純方位目標跟蹤
1.1 觀測模型


對于純方位目標跟蹤, 觀測量是方位角, 觀測方程為
1.2 EKF步驟

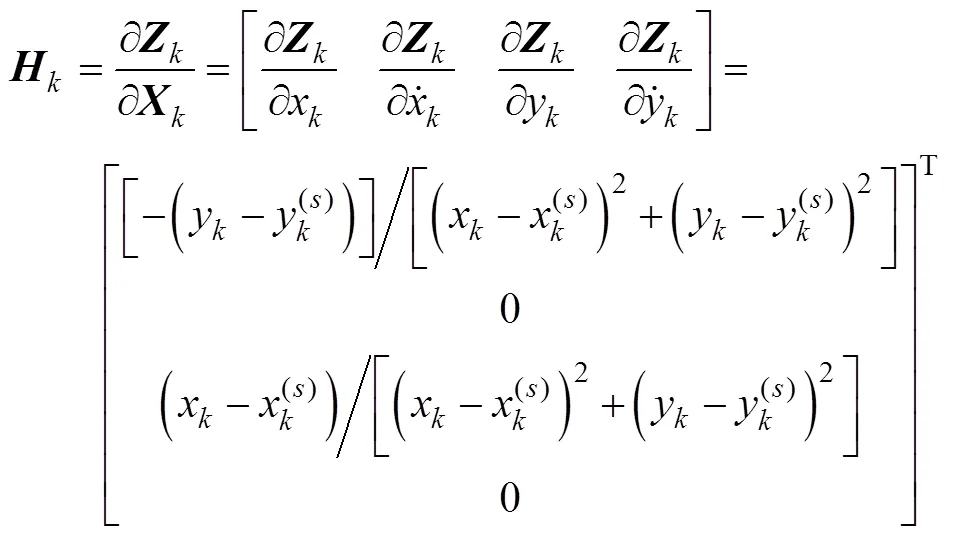
線性化后的觀測方程為
用狀態方程(1)和線性化后觀測方程(4)進行卡爾曼濾波, 可得到EKF的遞推方程, 步驟和線性卡爾曼濾波相似, 為了減少線性化誤差, 在計算狀態預測和觀測預測時, 仍然使用非線性函數。EKF具體步驟如下[4]。
1) 求解狀態預測值
2) 求解狀態協方差預測值

3) 求解卡爾曼增益矩陣

4) 狀態更新

5) 協方差更新

通過式(5)~式(9), 可完成EKF一個計算周期, 整個計算過程就是通過各時刻獲取的觀測量反復循環計算, 從而獲取各個時刻的目標狀態估計。
2 狀態估計變化方式
2.1 狀態估計變化
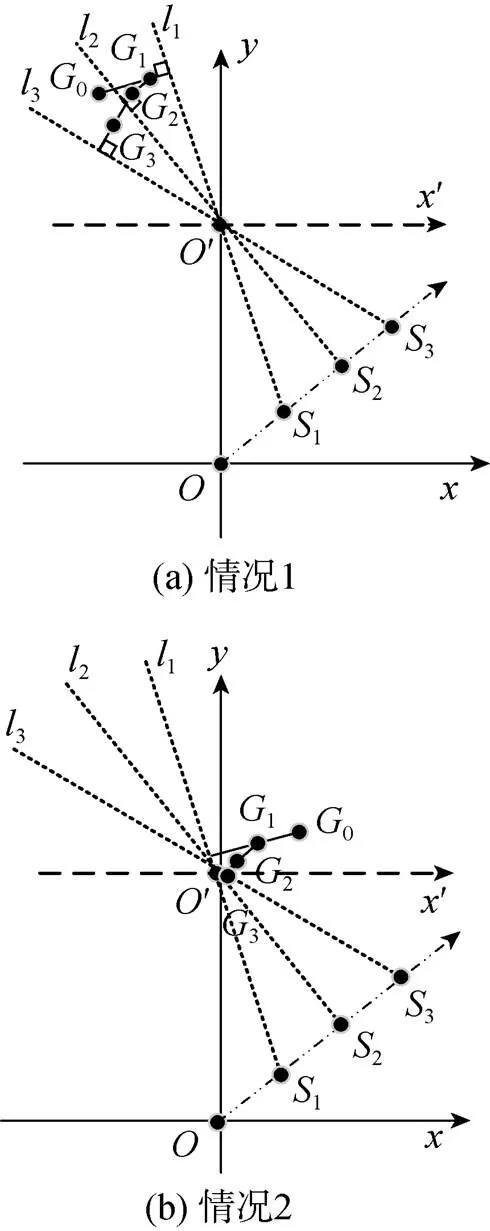
圖1 目標狀態估計位置變化
2.2 證明
將式(8)按矩陣元素展開, 得


式中,(1)和(3)分別為卡爾曼增益矩陣中的第1、第3個元素。
協方差矩陣初值


根據式(7)求卡爾曼增益矩陣
將式(20)除以式(19)得
3 后向遞推EKF
通過以上分析與證明可知, 由于目標狀態并不隨迭代直接向真實值靠近, 而是隨著迭代向觀測線方向靠近, 因此從初值選取開始, 狀態估計前值的不同可能造成后續收斂情況不同, 常表現為初值對濾波的影響。當目標和觀測站相對運動情況不同時, 狀態估計結果可能不同。實際工程中, 由于無法預知估計值與真實值的位置關系, 估計值難以隨遞推逐漸收斂到真值附近。尤其在短時觀測下, 觀測數據量少且觀測站機動不足, 難以保證估計的誤差迅速縮小。文中提出的SBR- EKF可通過后向遞推與正向遞推結合, 增加對數據的反復利用, 從而降低濾波誤差。
3.1 后向遞推
將系統狀態方程式(1)寫成方程組形式
對于勻速直線運動目標, 其速度不變, 則有
將式(23)寫成矩陣的形式





3.2 SBR-EKF
SBR-EKF方法通過在滑動窗內進行后向遞推得到前值估計, 再根據新的前值估計重新進行目標狀態估計。窗長為的SBR-EKF簡要步驟如下:
圖2 滑動后向遞推示意圖
Fig. 2 Diagram of sliding backward recursion
4 仿真與分析
為了驗證所提出方法的有效性, 進行了以下仿真試驗。文中的研究目的是解決快速運動目標短時觀測下的純方位被動跟蹤問題, 比如高速運動平臺的末程攻擊情形, 特點為短時觀測小數據量, 仿真參數設置以此為背景。進行100次蒙特卡洛試驗, 用100次試驗的均方根誤差(root mean square error, RMSE)來衡量跟蹤效果

式中:為不同時刻對應采樣點;為試驗次數。RMSE可看作目標位置估計與目標真實位置之間的距離, 其值越小定位結果越準確。
設置目標初始位置為原點, 目標以45 kn的速度向東勻速直線行駛。觀測站初始位置在目標東偏北35o方向, 以50 kn的速度向目標方向行駛, 以7o提前角追蹤目標, 速度50 kn。觀測站與目標的運動態勢見圖3。觀測站對目標觀測時間為6 s, 觀測量為目標方位, 測向的時間間隔為0.1 s。
4.1 不同窗長比較
設置觀測噪聲(即不同測向誤差)均值為0、協方差為2o, SBR-EKF的滑動窗長分別為1、5、10, 進行100次蒙特卡洛仿真。圖4為EKF與不同窗長SBR-EKF的濾波RMSE比較, 可以看到, SBR-EKF相比于EKF有更低的RMSE, 且此種情況下窗長越長濾波效果越好。不同窗長SBR-EKF的單次濾波平均計算時間如表1所示, 并計算其相對于標準EKF的計算時間。結果顯示與3.2節中計算量分析基本相符, 隨取值增大, 計算時間增長。
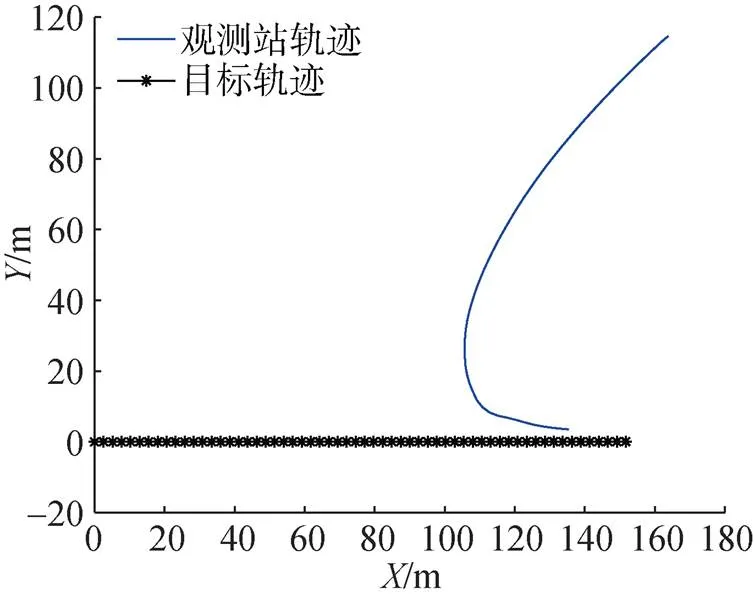
圖3 觀測站與目標的運動態勢圖
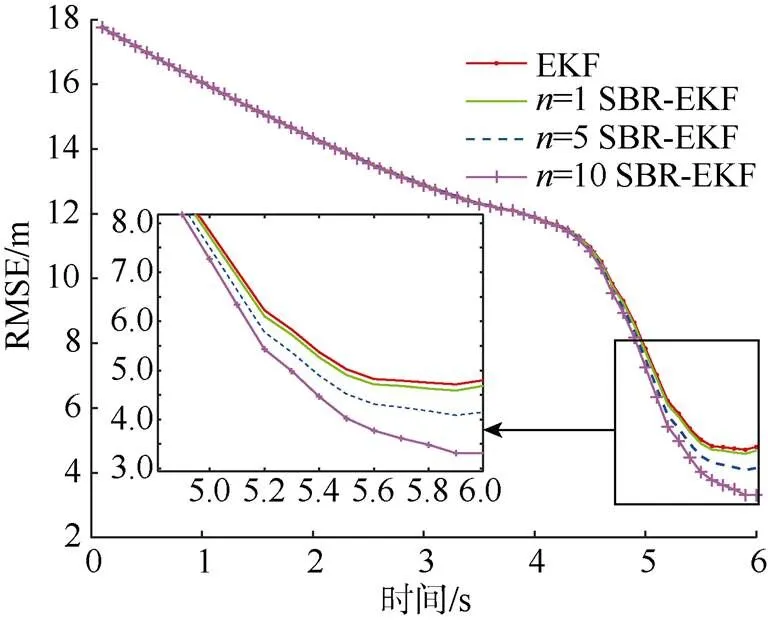
圖4 SBR-EKF與EKF效果比較

表1 單次濾波平均計算時間和相對時長
4.2 不同觀測噪聲比較
為了對比觀測噪聲下2種方法的性能, 在觀測噪聲協方差分別為1o~5o的情況下進行上述仿真試驗。100次蒙特卡洛試驗后, 統計仿真結果的平均RMSE如圖5所示, 統計觀測的最終時刻RMSE如圖6所示。
從圖中可以看到, 在不同的觀測噪聲下, 所提方法誤差均小于常規EKF, 且對于最終誤差的改善效果優于對于平均誤差的改善效果。值得注意的是, 在觀測噪聲較大的情況下,取值越大, 平均誤差和最終誤差會更低; 而在觀測噪聲協方差陣較小(如1°)的情況下,=10的效果更差。這是由于觀測噪聲協方差較小的情況下, 過多的后向遞推步數會造成對前值的過度估計, 使得濾波誤差增大。因此在實際應用中, 根據觀測噪聲的情況和計算能力合理選擇值是有必要的。
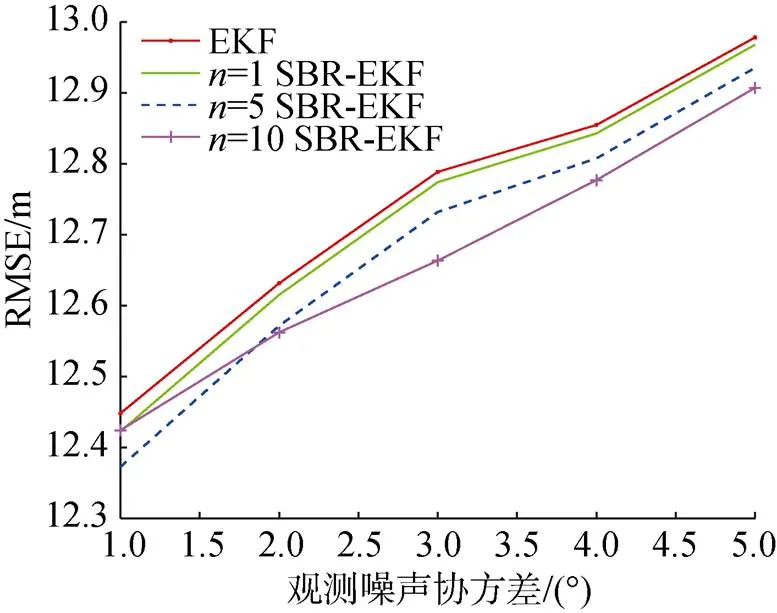
圖5 不同測向精度下平均RMSE比較

圖6 不同測向精度下的最終RMSE比較
4.3 不同噪聲協方差估計

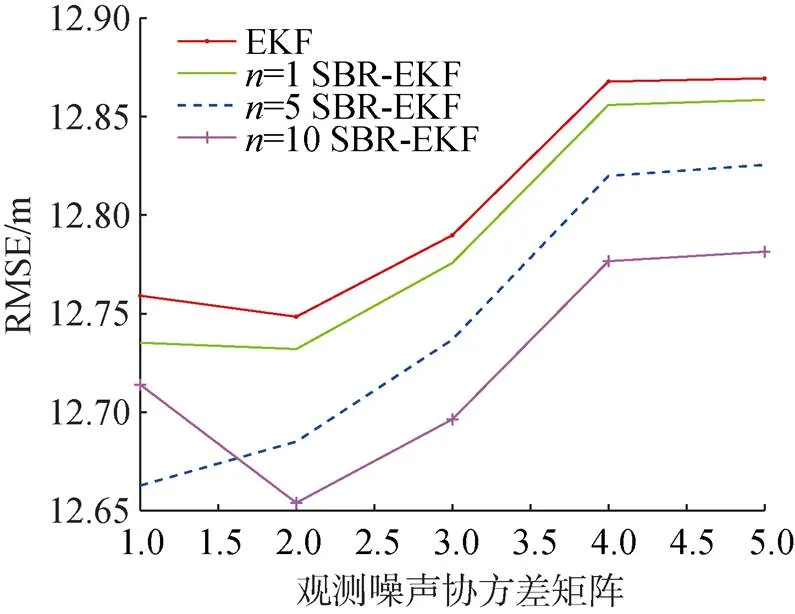
圖7 不同觀測噪聲協方差估計
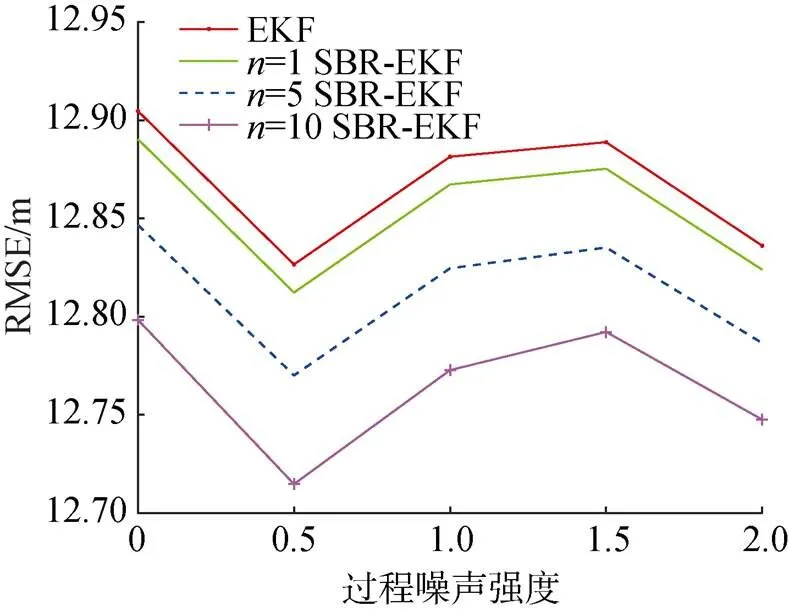
圖8 不同過程噪聲協方差估計
5 結束語
文中在短時觀測小數據量的背景下, 提出了一種SBR-EKF的水下純方位目標跟蹤方法。該方法在常規EKF的基礎上進行滑動后向遞推, 通過觀測數據的正反雙向遞推, 增加對數據的反復利用。仿真試驗結果表明, 該方法相較于常規EKF有更好的性能, 可達到更低的估計誤差, 表明了其較好的可行性和工程應用價值。該算法也適用于其他非線性濾波問題, 可為其他領域的應用提供新思路。后續的研究目標為探索更廣泛的算法應用, 以及改善由于多次迭代導致的算法計算量增加問題。
[1] 劉忠, 周豐, 石章松, 等. 純方位目標運動分析[M]. 北京: 國防工業出版社, 2009.
[2] Miller A B, Miller B M. Underwater Target Tracking Using Bearing-Only Measurements[J]. Journal of Comm- unications Technology and Electronics, 2018, 63(6): 643-649.
[3] 孫仲康, 郭福成, 馮道旺, 等. 單站無源定位跟蹤技術[M]. 北京: 國防工業出版社, 2008.
[4] Shalom Y, Li X R, Thiagalingam K. Estimation with Applications to Tracking and Navigation[M]. New York: Wiley, 2001: 381-394.
[5] Julier S J, Uhlmann J K. Unscented Filtering and Nonlinear Estimation[J]. Proceedings of the IEEE, 2004, 92(3): 401-422.
[6] Arasaratnam I, Haykin S. Cubature Kalman Filters[J]. IEEE Transactions on Automatic Control, 2009, 54(6): 1254-1269.
[7] Gordon N J, Salmond D J, Smith A F M. Novel Approach to Nonlinear/non-Gaussian Bayesian State Estimate[J]. IEEE Proceeding of Radar, Sonar and Navigation, 1993, 140(2): 107-113.
[8] Zhao J. Dynamic State Estimation with Model Uncertainties Using∞Extended Kalman Filter[J]. IEEE Transactions on Power Systems, 2018, 33(1): 1099-1100.
[9] Li X, Zhao C, Yu J, et al. Underwater Bearing-only and Bearing-Doppler Target Tracking Based on Square Root Unscented Kalman Filter[J]. Entropy, 2019, 21(8): 740.
[10] Lim J, Shin M, Hwang W. Variants of Extended Kalman Filtering Approaches for Bayesian Tracking[J]. Internat- ional Journal of Robust and Nonlinear Control, 2016, 27(2): 319-346.
[11] He R, Chen S X, Wu H, et al. Adaptive Covariance Feedback Cubature Kalman Filtering for Continuous-Discrete Bearings-Only Tracking System[J]. IEEE Access, 2019, 7: 2686-2694.
[12] Zhou W, Liu L. Adaptive Cubature Kalman Filter Based on the Expectation-Maximization Algorithm[J]. IEEE Access, 2019, 7: 158198-158206.
[13] Zhao Y, Wang T, Qin W, et al. Improved Rao-Blackwell- ised Particle Filter Based on Randomly Weighted Particle Swarm Optimization[J]. Computers and Electrical Engineering, 2018, 71: 477-484.
[14] Liu H, He B, Feng C, et al. Navigation Algorithm Based on PSO-BP UKF of Autonomous Underwater Vehicle[C]// IEEE Underwater Technology(UT). Kaohsiung, Taiwan: IEEE, 2019.
[15] Konatowski S, Kaniewski P, Matuszewski J. Comparison of Estimation Accuracy of EKF, UKF and PF Filters[J]. Annual of navigation, 2016, 23(1): 69-87.
Sliding Backward Recursive EKF Bearings-Only Target Tracking Method
ZHENG Yi, WANG Ming-zhou
(The 705 Research Institute, China Shipbuilding Industry Corporation, Xi’an 710077, China)
In the field of target location and tracking, when only one observer is present and only the bearings of the target can be obtained, passive bearings-only underwater target tracking by a single observer is difficult. In engineering applications, the time of observation is short and the amount of data is sometimes small, which makes target location and tracking more difficult. In this study, the principle of a conventional extended Kalman filter(EKF) is studied and the characteristics of state estimation changes in bearings-only target tracking by a single observer are analyzed and proved by formula derivation. Considering the special background of short-term observation and the existence of a small amount of data, this study proposes a sliding backward recursive EKF method. Through a combination of backward and forward recursion, the data are reused and estimation errors are reduced. In a simulation of different observation noises and noise covariance estimates, results show that the proposed method generates lower errors than the conventional EKF for bearings-only target tracking by a single observer using a small amount of short-term observation data.
underwater target tracking; backward recursion; extended Kalman filter(EKF); bearings-only; short-term observation
TJ630.34; U664.82
A
2096-3920(2020)06-0663-07
10.11993/j.issn.2096-3920.2020.06.011
2020-07-14;
2020-09-27.
鄭 藝(1992-), 女, 在讀博士, 主要研究方向為水下目標跟蹤定位.
鄭藝, 王明洲. 一種滑動后向遞推的EKF純方位目標跟蹤方法[J]. 水下無人系統學報, 2020, 28(6): 663-669.
(責任編輯: 楊力軍)
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56