亞龍YL-1522B 型智能果蔬分揀設備部分結構優化*
2021-01-20 11:41:46陳行行秦培亮劉楨筠
南方農機 2021年1期
陳行行, 秦培亮, 張 磊, 劉楨筠
(蘇州農業職業技術學院智慧農業學院,江蘇 蘇州 215008)
0 引言
我國是農業大國,土地資源豐富,氣候條件適宜,適合大面積種植水果蔬菜, 果蔬成為我國繼糧食產業之后的第二大農業支柱產業[1]。 隨著農產品加工自動化程度越來越高,采用工業機器人代替傳統人工分揀水果、蔬菜等農產品是適應現代農業發展所需[2]。因此,亞龍YL-1522B 型智能果蔬分揀實訓設備的應用前景很寬廣。
蘇州農業職業技術學院實訓室有5 臺亞龍YL-1522B 型智能果蔬分揀實訓設備, 該設備具有六個單元,分別為送料單元、大小料分揀單元、視覺單元、分揀入庫單元、觸摸屏單元、機器人。 安裝在實訓臺上實物分別是物料傳送、驅動系統、分揀處理系統、視覺檢測處理系統、六軸機械手臂氣動吸盤、碼垛等主要部分。 電氣布局采用雙抽屜式,所有電氣控制器都安裝在網孔板式的抽屜上,這種機電分離的布局更加符合工業實際情況。 其中,每一工作單元都可自成一個獨立的系統, 同時也是一個機電一體化的系統。該設備集成了數控系統、PLC 控制、變頻調速控制、傳感器檢測、伺服驅動控制、低壓電氣控制、機械傳動等技術。亞龍YL-1522B 型智能果蔬分揀實訓設備有效模擬了現實生活中實際果蔬的分揀過程, 給學生提供一個與實際應用非常接近教學設備環境, 從而可以順利實現從理論教學過渡到實際應用[3]。
1 亞龍YL-1522B 型智能果蔬分揀實訓設備工作過程及問題描述
亞龍YL-1522B 型智能果蔬分揀實訓設備(如圖1 所示)在分揀處理單元動作時,將需要分揀的果蔬放置在傳送帶上,果蔬經傳送帶進入到檢測農產品的區域,通過光纖傳感器對果蔬的大小進行檢測, 依照果蔬的具體情況判斷是否滿足其所在的機械定位上, 推桿將果蔬推送到各個機械定位的分料口,進行篩選歸類。 果蔬進入到視覺檢測單元后,通過步進電機驅動傳送帶輸送果蔬,果蔬進入到視覺檢測位置,對果實的外形大小、顏色進行檢測識別,以及數據采集,從而對視覺檢測過的果蔬與預先采集的果蔬模型完整度進行比較,便于分揀出優質果蔬。 最后果蔬搬運碼垛入庫單元工作時,六軸機械手臂氣動吸盤對檢測完成的果蔬進行搬運工作,將果蔬輸送到各個不同的碼垛,實現分揀效果。

圖1 智能果蔬分揀實訓設備

圖2 分料處理單元
在實際使用過程中發現, 亞龍YL-1522B 型智能果蔬分揀實訓設備在操作過程中存在一些結構問題及不足,因而導致機器運行不流暢、分揀過程中導致果蔬損壞、機器無法正常運行、分揀效果不理想等情況。
1.1 分揀處理單元故障
分揀處理單元(如圖2 所示)動作時,推桿推送前,果蔬經過傳送帶的輸送會發生位置變化,推桿不一定會推送果蔬的中心位置, 分料口位置是嚴格按照果蔬大小設計的,從而導致推桿推送果蔬卡在分料口處,造成果蔬的損壞,分揀系統的部分癱瘓,不能正常工作。
1.2 視覺檢測箱內故障
果蔬進入到視覺檢測單元(如圖3 所示)后,由于果蔬從分料口進入到視覺檢測單元的過程中會發生滾落,以及進入到視覺檢測位置時會發生偏轉, 卡在視覺檢測箱內,無法進入到下一階段的搬運工作。
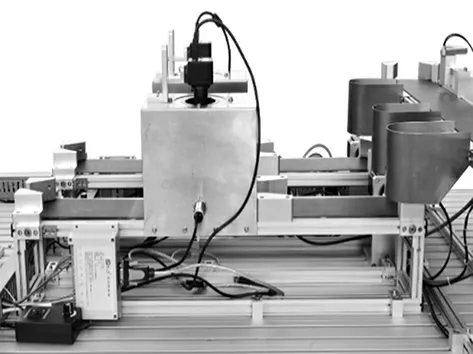
圖3 視覺檢測單元
1.3 搬運碼垛入庫單元故障
果蔬搬運碼垛入庫單元(如圖4 所示)工作時,在六軸機械手臂氣動吸盤在吸取果蔬時, 會出現吸取的準確性較低,吸取位置偏置無法進行碼垛,甚至導致六軸機械手臂氣動吸盤空運行。

圖4 碼垛入庫單元
2 亞龍YL-1522B 型智能果蔬分揀實訓設備優化改進
針對亞龍YL-1522B 型智能果蔬分揀實訓設備在實際運行仿真過程過程中遇到的問題及不足之處提出改進方案,優化升級。
2.1 分揀處理單元故障改進
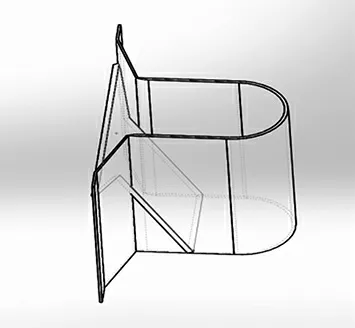
圖5 分料口設計圖
針對果蔬位置變化導致推桿推送后果蔬損壞的問題,進行以下改造措施,分料口(如圖5 所示)采用錐形設計,棱角處采用圓角,解決果蔬位置變化導致不能使果蔬進入分料口,輸送到下一單元的原因。
2.2 視覺檢測箱內故障改進
對于果蔬發生滾落,以及進入視覺檢測箱后發生偏轉卡在視覺檢測箱內的問題, 采取增添U 型軌道隔板限定果蔬從分料口進入視覺檢測單元能夠處于中心位置,避免滑落,在視覺檢測箱的出口處增加導向限位塊,使果蔬進入視覺檢測箱后依然能安全輸送到出料口。
2.3 搬運碼垛入庫單元故障改進
六軸機械手臂氣動吸盤在吸取果蔬時出現吸取準確性低,吸取時發生偏置無法進行碼垛,甚至造成空運行現象,是由于吸盤大小和種類的固定性。
氣動吸盤的吸附力大小選擇取決于被移送物體的質量, 被移動物體的形狀和表面狀態決定氣動吸盤的種類,因此氣動吸盤的吸附力大小和種類選擇是至關重要的。
針對氣動吸盤的吸附力大小進行計算分析:

其中:F 為理論吸附力,N; P 為絕對壓力,即真空度,kPa;S 為吸附有效面積,cm2;G 為重力加速度,值為9.8m/s2。
通過對氣動吸盤吸附力大小的計算,不同果蔬給予不同的吸附力,選取3 組果蔬為實驗樣品,分別為蘋果、香蕉、橘子,每組50 顆,進行實際的吸附試驗,得到表1 結論:
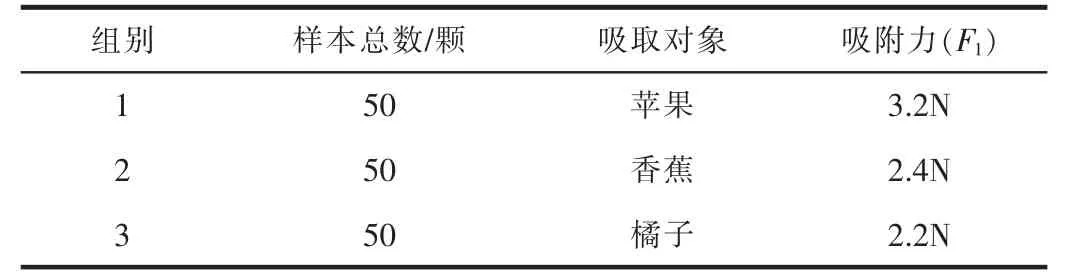
表1 吸盤吸附力結果分析
選取不同吸盤,綜合不同果蔬需要,進行多次測試,總結以下三類:

表2 吸盤的種類選取
通過對吸盤測試研究, 總結出表1、2 吸盤選取結果,解決了六軸機械手臂氣動吸盤空運行現象,使得吸取果蔬的準確性和位置穩定性得到較大提高。
3 亞龍YL-1522B 型智能果蔬分揀實訓設備改進創新點
1) 本文綜合分析亞龍YL-1522B 型智能果蔬分揀實訓設備的現狀, 以及智能果蔬分揀設備在實際運行仿真過程中出現的問題和不足之處進行升級改造, 創新優化,使得亞龍YL-1522B 型智能果蔬分揀實訓設備更加完善。
2) 提高亞龍YL-1522B型智能果蔬分揀實訓設備仿真的真實性、 穩定性和可靠性,有利于教育事業的發展,提升教學質量,直觀充分地做到理論和實踐的有機結合, 同時增強了亞龍YL-1522B 型智能果蔬分揀實訓設備用戶的使用滿意度。
4 結束語
隨著社會生活水平和生活觀念的不斷提高, 人們愈加追求新鮮、美觀、優質的果蔬產品。 果蔬采摘后分揀時間緊,人工分揀效率低,不能滿足市場需求,檢測與分揀技術的發展顯得尤為關鍵[5]。 智能分揀有利于逐級分揀出不同等級的果蔬,不同產品對應不同價格,對于農業者而言,做到了利益最大化,對于消費者而言,可以根據所需挑選不同等級的果蔬。
亞龍YL-1522B 型智能果蔬分揀實訓設備仿真設備的優化升級,使學校在之后的教學工作中更加順暢,讓學生更好的在智能果蔬分揀實訓設備中得到實踐, 做到理論與實踐相結合,不斷提升專業能力。 以工業機器人技術為基礎的智能化、 自動化加工系統必然會促進農產品加工快速發展,加速農業生產的現代化進程,促進農業經濟的快速發展[6]。 亞龍YL-1522B 型智能果蔬分揀實訓設備的改進升級對分揀技術的發展有著促進性作用,具有良好的發展應用前景。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
裝備制造技術(2020年12期)2020-05-22 09:25:38
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2017年8期)2017-06-05 09:36:15
工業設計(2016年12期)2016-04-16 02:52:00
信息記錄材料(2016年4期)2016-03-11 15:22:54
