改進(jìn)bang-bang控制的微網(wǎng)VSG自適應(yīng)虛擬慣量控制策略
2021-01-21 02:59:22高飛翎周勛甜邵雪峰溫步瀛
關(guān)鍵詞:策略
錢 凱,高飛翎,周勛甜,邵雪峰,李 勁,溫步瀛
(1. 寧波市電力設(shè)計(jì)院有限公司,浙江 寧波 315000; 2. 福州大學(xué)電氣工程與自動(dòng)化學(xué)院,福建 福州 350108)
0 引言
隨著傳統(tǒng)石化能源的枯竭,能源結(jié)構(gòu)的變革已經(jīng)成為我國能源改革的重點(diǎn). 逆變器是大部分新能源與電網(wǎng)之間的電能交換接口,基于逆變器連接的新能源無法像傳統(tǒng)的同步發(fā)電機(jī)一樣為系統(tǒng)提供慣性支撐,導(dǎo)致系統(tǒng)發(fā)生擾動(dòng)時(shí)各電能參數(shù)響應(yīng)過快. 因此,新能源還需具備相應(yīng)的頻率支撐能力,以維持電網(wǎng)的安全穩(wěn)定運(yùn)行[1-4].
為使新能源具備調(diào)頻的功能,有學(xué)者提出下垂控制方法[5-6],模擬同步發(fā)電機(jī)實(shí)現(xiàn)一次調(diào)頻功能. 但是,采用下垂控制的新能源仍然沒有為電網(wǎng)提供慣性支撐的能力,因此當(dāng)系統(tǒng)中有功負(fù)載突變時(shí),電網(wǎng)頻率會(huì)由于慣性的缺失而出現(xiàn)頻率快速抖動(dòng)的現(xiàn)象.
為使新能源具備慣性支撐的能力,文獻(xiàn)[7-10]提出了虛擬同步機(jī)(virtual synchronous generator, VSG)的概念,從外特性上模擬同步發(fā)電機(jī),在實(shí)現(xiàn)一次調(diào)頻與調(diào)壓功能的基礎(chǔ)上,還實(shí)現(xiàn)了慣性支撐功能. 文獻(xiàn)[11]對比了風(fēng)電機(jī)組中各種慣量控制方法的效果,證明VSG策略能提高系統(tǒng)在弱電網(wǎng)工況下的穩(wěn)定性. 文獻(xiàn)[12]結(jié)合同步發(fā)電機(jī)的功角曲線,使虛擬慣量的大小根據(jù)VSG頻率的變化率自適應(yīng)線性變化. 文獻(xiàn)[13]提出一種基于bang-bang控制的VSG控制算法,虛擬慣量隨著頻率的變化而改變?yōu)樵O(shè)定的最大值或最小值,提高系統(tǒng)頻率的穩(wěn)定性,但是沒有給出虛擬慣量最值的整定方法. 文獻(xiàn)[14-15]都以儲能容量為約束整定參數(shù)自適應(yīng)控制策略中虛擬慣量的取值范圍,從而為VSG在工程中的應(yīng)用提供一定參考.
本研究提出一種基于改進(jìn)bang-bang控制的VSG自適應(yīng)虛擬慣量控制策略. 為減少穩(wěn)態(tài)時(shí)虛擬慣量抖動(dòng),設(shè)定一個(gè)頻率穩(wěn)態(tài)區(qū)間,并對于該穩(wěn)態(tài)區(qū)間設(shè)定一個(gè)相應(yīng)的穩(wěn)態(tài)慣量. 當(dāng)頻率超出穩(wěn)態(tài)區(qū)間時(shí),虛擬慣量隨頻率的變化率以及偏差量自適應(yīng)地改變?yōu)樵O(shè)定的最大值或最小值. 最后,利用仿真驗(yàn)證了所提方法的有效性.
1 VSG基本原理
VSG的基本原理框圖如圖1所示. 圖中:L1為逆變器側(cè)電感,C為濾波電容,L2為網(wǎng)側(cè)電感,Rg和Lg為線路等效阻抗. 通過VSG控制環(huán)節(jié)后得到的虛擬電動(dòng)勢Er與虛擬功角θ,經(jīng)過虛擬阻抗[16]控制環(huán)節(jié),使有功環(huán)與無功環(huán)解耦,得到參考電流Iref,最后經(jīng)脈寬調(diào)制(PWM)控制三相逆變橋中各開關(guān)的開斷,實(shí)現(xiàn)整個(gè)VSG系統(tǒng)的控制. 加入虛擬阻抗后Iref和Er以及θ之間的關(guān)系式如下:

(1)
式中:Rv為虛擬電阻;Lv為虛擬電感;U為公共耦合點(diǎn)電壓.
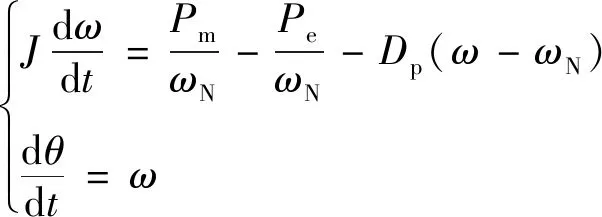
VSG中有功環(huán)控制環(huán)節(jié)模擬極對數(shù)為1的同步發(fā)電機(jī)的轉(zhuǎn)子運(yùn)動(dòng)方程為:
(2)
式中:J為轉(zhuǎn)動(dòng)慣量;ω為轉(zhuǎn)子角速度;Pm與Pe分別為機(jī)械功率與電磁功率;ωN為轉(zhuǎn)子額定角速度;Dp為阻尼系數(shù);θ為功角.
為實(shí)現(xiàn)微網(wǎng)模式下頻率的無差調(diào)節(jié),在阻尼環(huán)節(jié)并聯(lián)一個(gè)積分器,實(shí)現(xiàn)有功環(huán)二次調(diào)頻的功能[17]. 控制框圖如圖2所示. 其中,ki為積分增益;Qe為輸出的無功功率;Qref為無功功率的給定值.
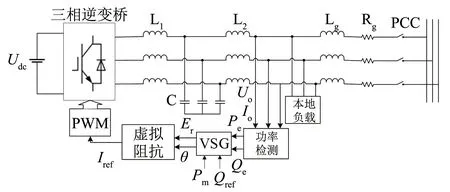
圖1 VSG的基本原理框圖Fig.1 Principle block diagram of VSG
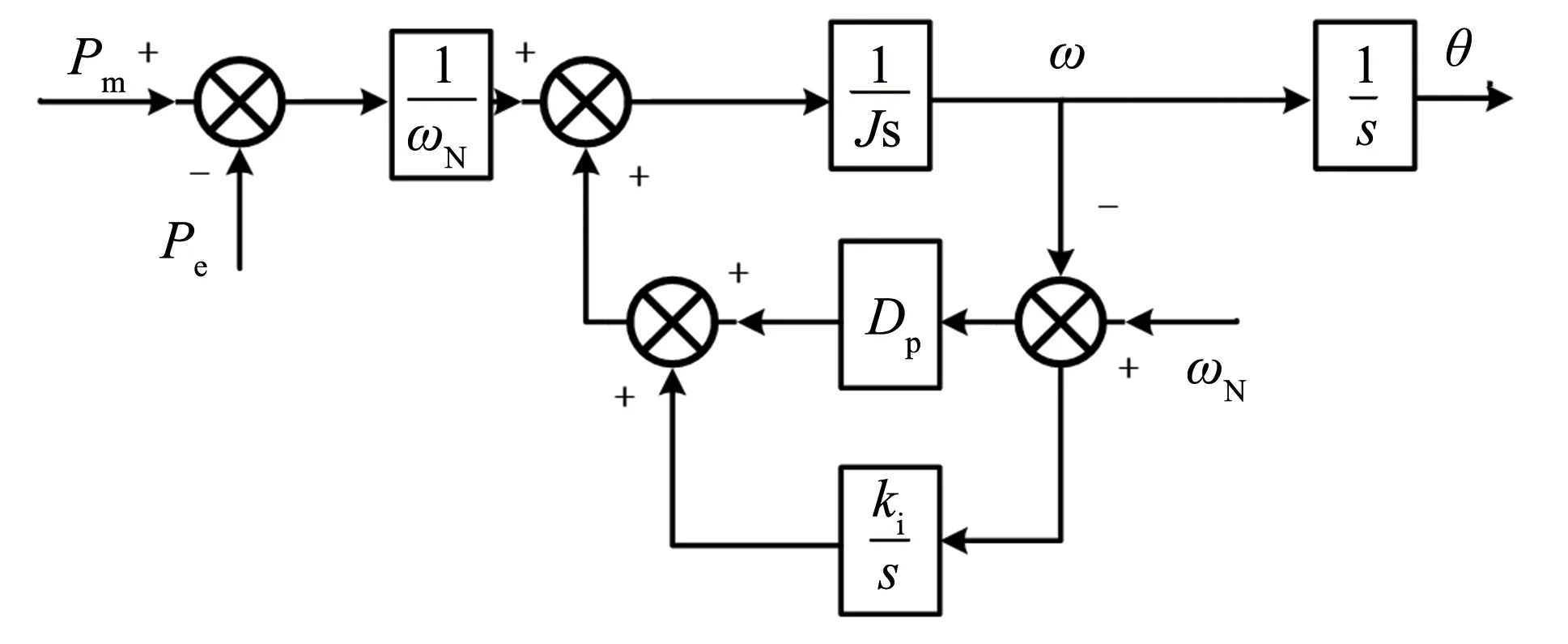
圖2 具有二次調(diào)頻功能的VSG有功環(huán)Fig.2 Active-power loop of the VSG with the function of secondary frequency regulation
2 自適應(yīng)虛擬慣量控制策略
式(2)可化為以下形式:

(3)
其中:ΔP為有功功率偏差; Δω為轉(zhuǎn)子角速度偏差量.
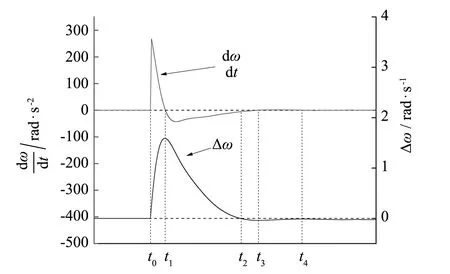
圖3 負(fù)載突然減小時(shí)dω/dt和Δω的變化曲線圖Fig.3 Relationship between dω/dt and Δω of load shedding
當(dāng)負(fù)載突然減小時(shí),轉(zhuǎn)子角速度變化率dω/dt與轉(zhuǎn)子角速度偏差Δω的變化如圖3所示. 結(jié)合式(3),分析虛擬慣量變化情況與轉(zhuǎn)子角速度的關(guān)系.
分析t0~t1區(qū)間,t0時(shí)刻負(fù)載突然減小,即ΔP突然增大,根據(jù)式(3)與圖3可知,Δω在t0時(shí)刻不變,這導(dǎo)致J(dω/dt)急劇增大,因?yàn)镴為固定值,所以dω/dt突增. 因?yàn)棣う卦趖0時(shí)刻后開始上升,所以dω/dt在突增至最大值后開始下降,直至t1時(shí)刻降為0,而此時(shí)Δω上升至最大值. 結(jié)合式(3)可知,若在t0~t1區(qū)間,適當(dāng)增大虛擬慣量J可減小dω/dt突變量,進(jìn)而減小轉(zhuǎn)子角速度偏差量Δω.
分析t1~t2區(qū)間,Δω開始回落,直至t2時(shí)刻降為0,此時(shí)dω/dt緩慢減小至最小值后回復(fù)至0,且在t1~t2區(qū)間內(nèi)都小于0. 結(jié)合式(3)可知,若在t1~t2區(qū)間適當(dāng)減小虛擬慣量J可減小dω/dt,即增大|dω/dt|使得Δω更快地回復(fù)至0.
t2~t3區(qū)間和t3~t4區(qū)間的情況與t0~t1區(qū)間和t1~t2區(qū)間的情況類似,都需要適當(dāng)改變虛擬慣量的大小以獲得更好的頻率響應(yīng)特性.
對于傳統(tǒng)的基于bang-bang控制的自適應(yīng)虛擬慣量策略[13],其虛擬慣量隨頻率的變化率及偏差量乘積的正負(fù)自適應(yīng)地變?yōu)榻o定的最大值或最小值. 在此基礎(chǔ)上,提出基于改進(jìn)bang-bang控制的自適應(yīng)虛擬慣量策略. 設(shè)定一個(gè)頻率穩(wěn)態(tài)區(qū)間,減少頻率因檢測精度等原因使得穩(wěn)態(tài)時(shí)虛擬慣量抖動(dòng),間接造成頻率抖動(dòng)的問題. 當(dāng)頻率超出穩(wěn)態(tài)區(qū)間時(shí),虛擬慣量隨頻率的變化率以及偏差量乘積的正負(fù)自適應(yīng)地改變?yōu)樵O(shè)定的最大值或最小值. 同時(shí)為頻率穩(wěn)態(tài)區(qū)間設(shè)定一個(gè)穩(wěn)態(tài)慣量,該值介于虛擬慣量的最大值與最小值之間. 當(dāng)頻率在穩(wěn)態(tài)區(qū)間時(shí),虛擬慣量自適應(yīng)地改變?yōu)榉€(wěn)態(tài)慣量,避免因慣量過大而導(dǎo)致頻率響應(yīng)過慢或因慣量過小導(dǎo)致頻率受到擾動(dòng)時(shí)造成頻率的偏差量過大. 具體策略如下式所示:
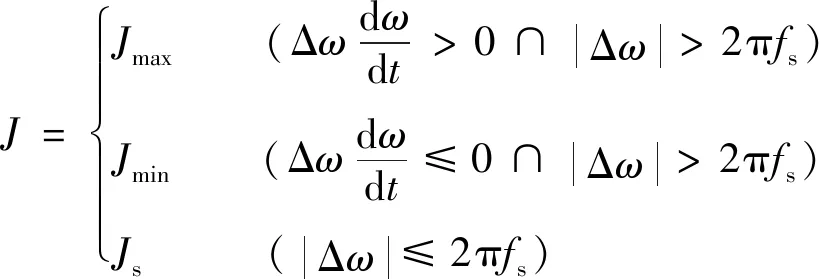
(4)
式中:Jmax、Jmin、Js分別為虛擬慣量的可取的最大值、 最小值以及穩(wěn)態(tài)時(shí)的固定值;fs為穩(wěn)態(tài)區(qū)間的頻率偏差量. 虛擬慣量的取值范圍、 穩(wěn)態(tài)慣量的選取在后續(xù)章節(jié)中由小信號分析模型獲得.
3 小信號模型
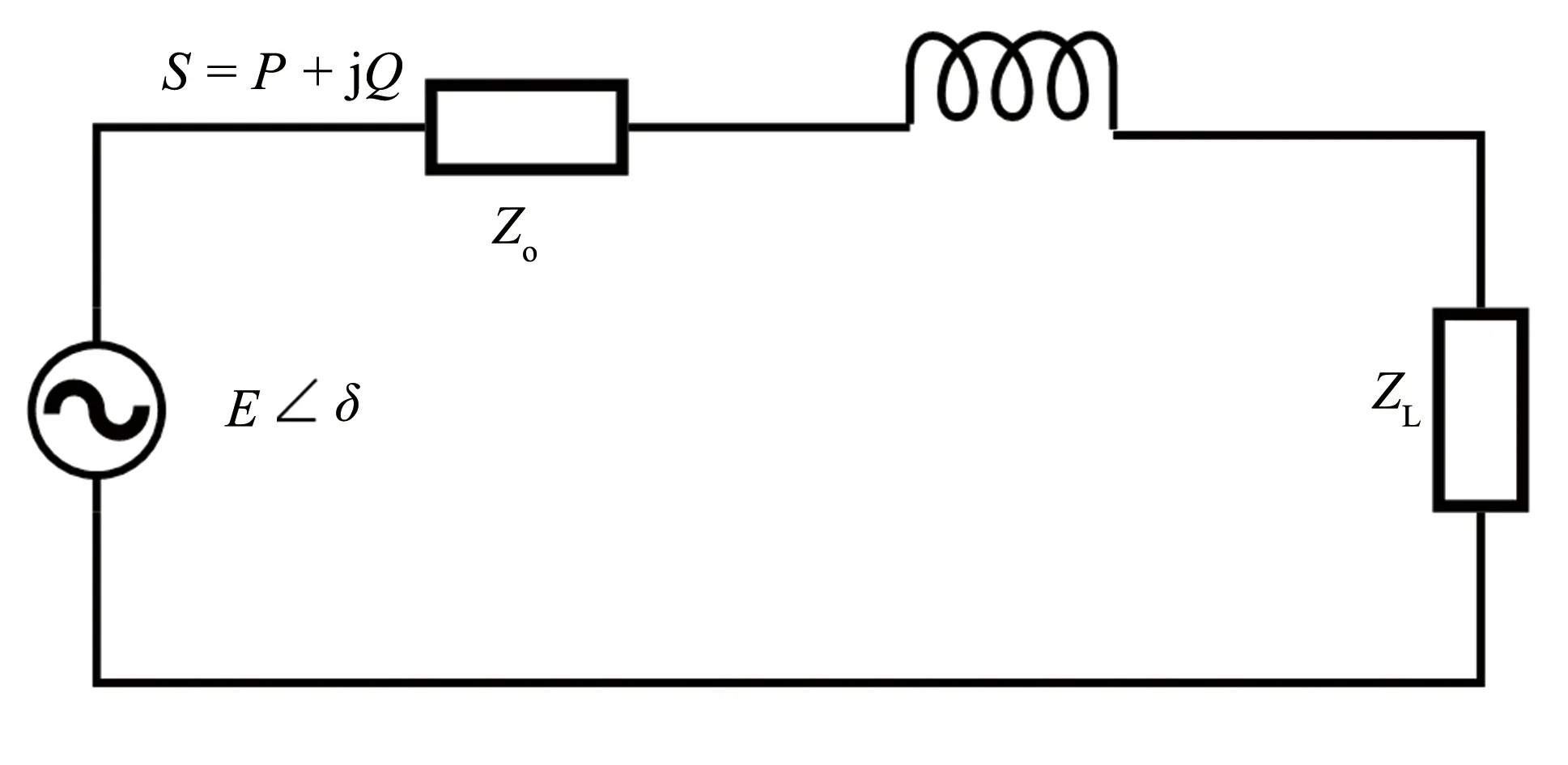
圖4 微網(wǎng)模式下逆變器等效電路Fig.4 Equivalent circuit of inverter under island mode
微網(wǎng)模式下VSG的等效電路如圖4所示. 其中,逆變器輸出電壓為E∠δ;Zo為逆變器輸出阻抗;ZL為負(fù)載阻抗; 逆變器輸出的功率為S=P+jQ,設(shè)輸出阻抗與負(fù)載阻抗之和為R+jX[17-18],則:
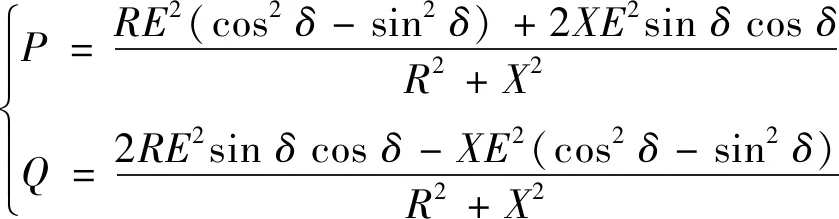
(5)
設(shè)靜態(tài)工作點(diǎn)為(ES,δS),對式(5)兩端進(jìn)行求導(dǎo),可得功角擾動(dòng)Δδ以及電壓擾動(dòng)ΔE與輸出有功功率偏差ΔP以及無功功率偏差ΔQ之間的關(guān)系:
(6)
為簡化分析,在虛擬阻抗控制下,將有功環(huán)和無功環(huán)看作近似解耦,結(jié)合圖2以及式(2)、 (5)、 (6),可得微網(wǎng)模式下功率環(huán)的小信號等效模型,如圖5所示. 根據(jù)圖5求得有功環(huán)的閉環(huán)傳遞傳遞函數(shù):
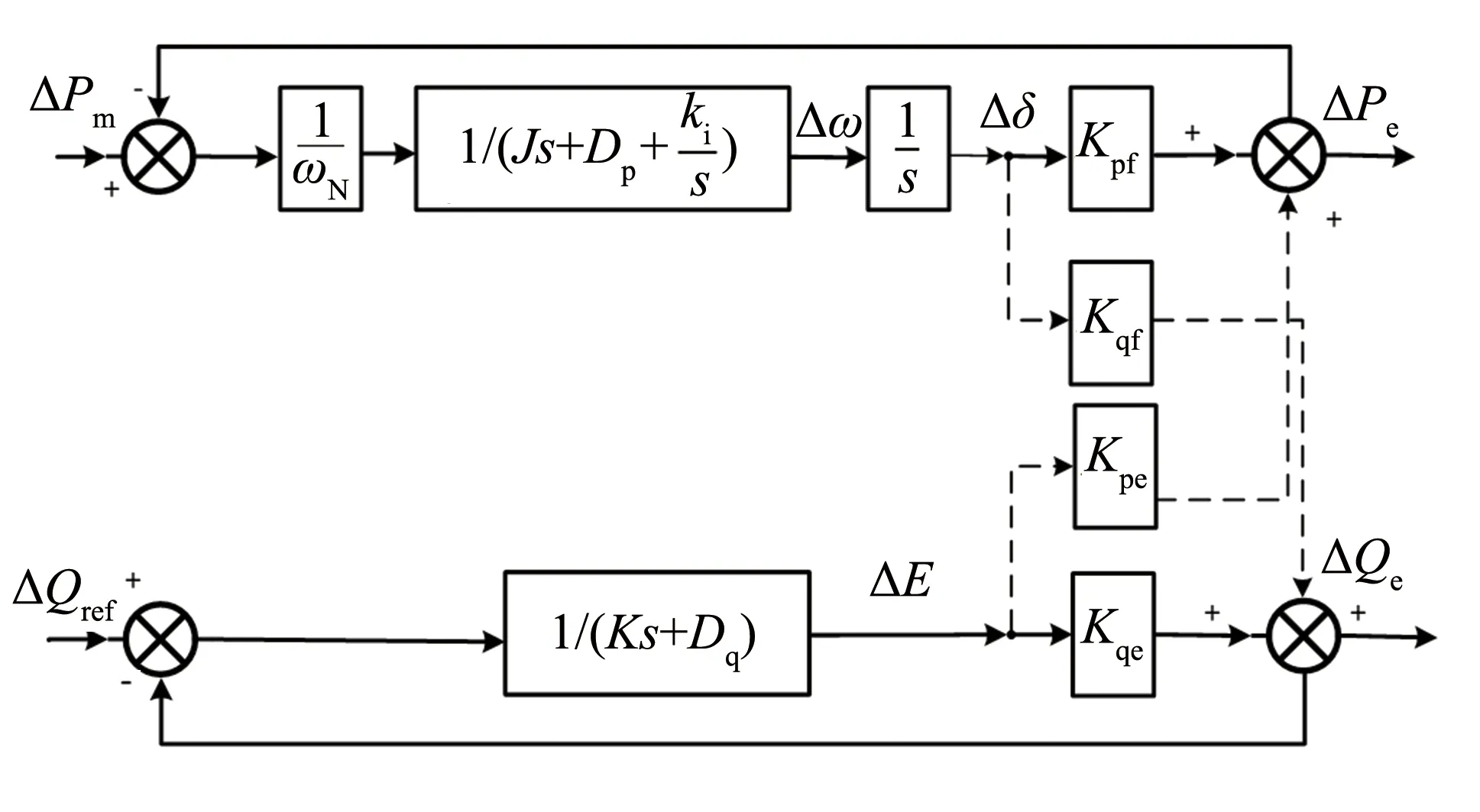
圖5 VSG的小信號等效模型Fig.5 Small-signal equivalent model of VSG

(7)
由式(7)可知,VSG有功環(huán)閉環(huán)傳遞函數(shù)為典型的二階系統(tǒng),其中自然振蕩角頻率ωNp、 阻尼比ξ和放大系數(shù)Kp為:
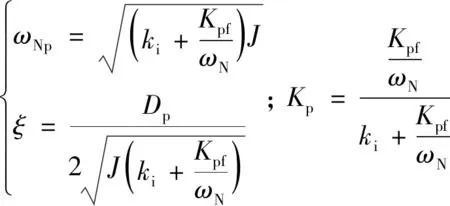
(8)
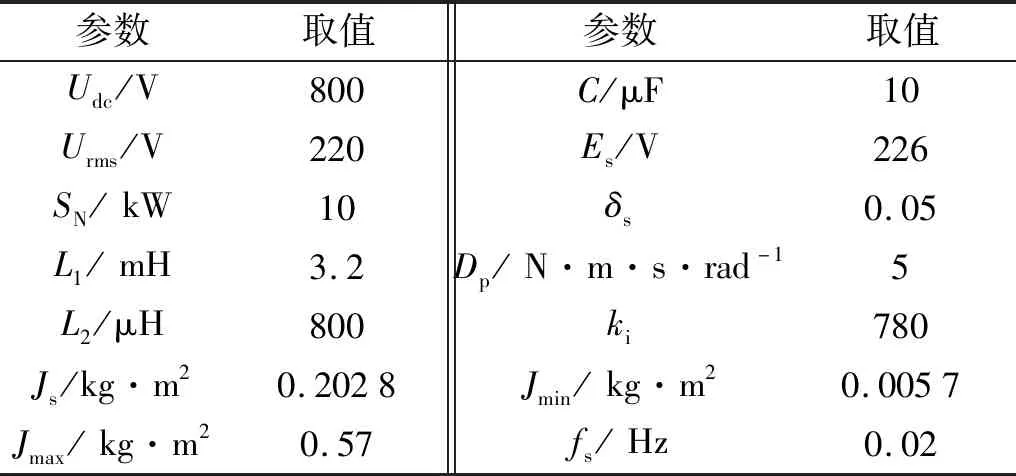
其中:Kpf的大小可由表1及式(6)計(jì)算得到,當(dāng)有功環(huán)與無功環(huán)近似解耦時(shí),Kpf約為1.0 × 105.
二階系統(tǒng)穩(wěn)定的條件是阻尼比ξ> 0. 為使VSG具有較快的頻率響應(yīng)速度,令有功環(huán)為欠阻尼環(huán)節(jié),0 <ξ< 1. 由ξ> 0易得J> 0; 由ξ< 1可得J> 0.005 7.
根據(jù)GB/T31464-2015《電網(wǎng)運(yùn)行準(zhǔn)則》[19]的規(guī)定,機(jī)組一次調(diào)頻需在3 s內(nèi)開始響應(yīng)頻率故障. 假設(shè)VSG參與電網(wǎng)調(diào)頻的響應(yīng)時(shí)間ts,其約等于VSG有功環(huán)響應(yīng)時(shí)間tp. 考慮一定的裕度,令tp<1 s. 典型欠阻尼二階環(huán)節(jié)響應(yīng)時(shí)間計(jì)算公式為:
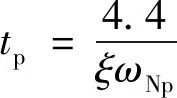
(9)
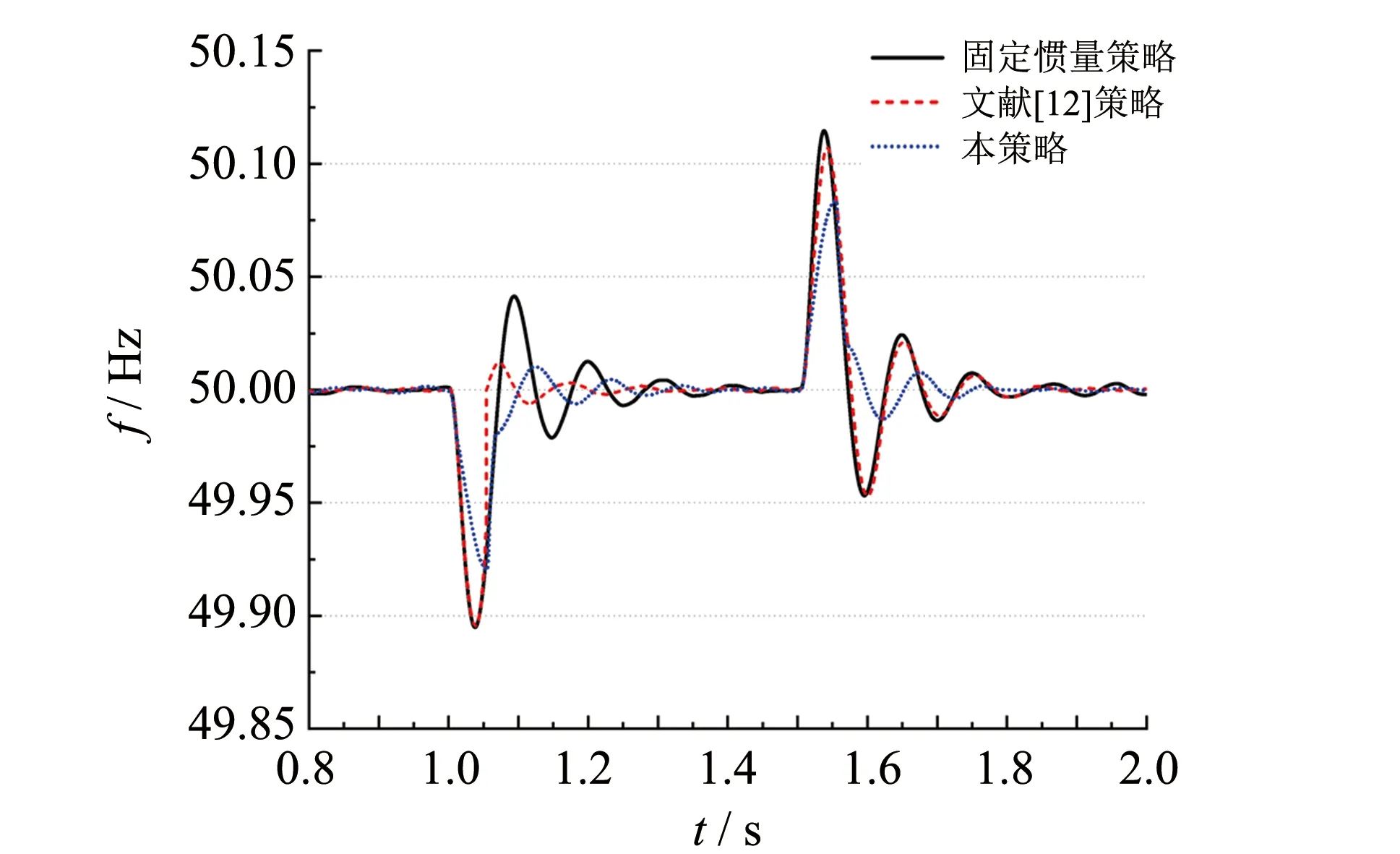
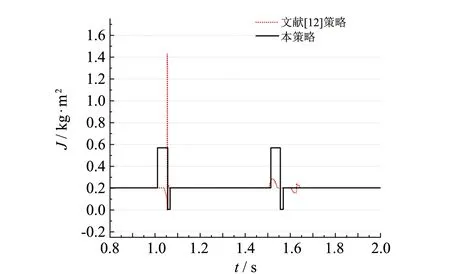
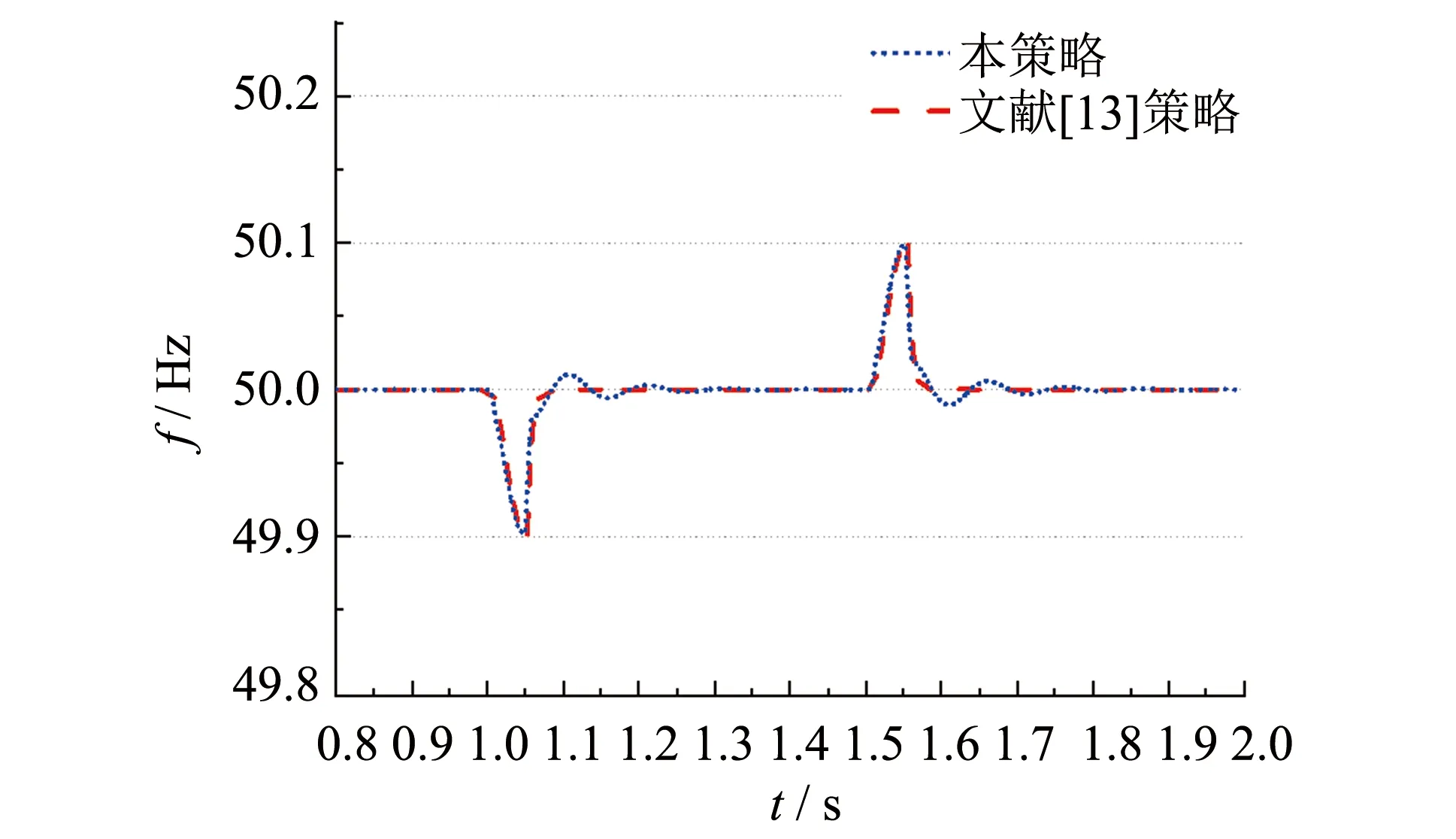
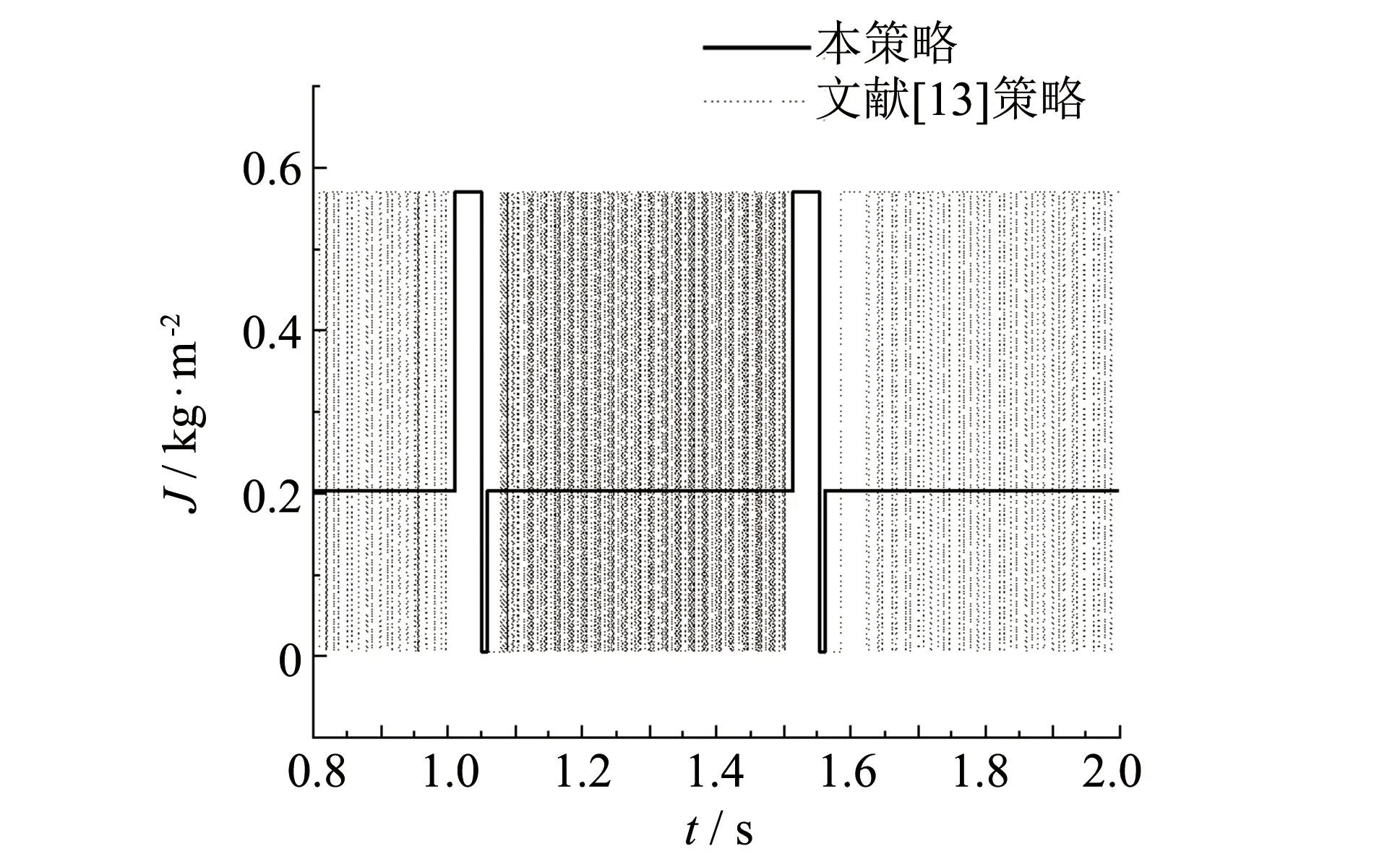
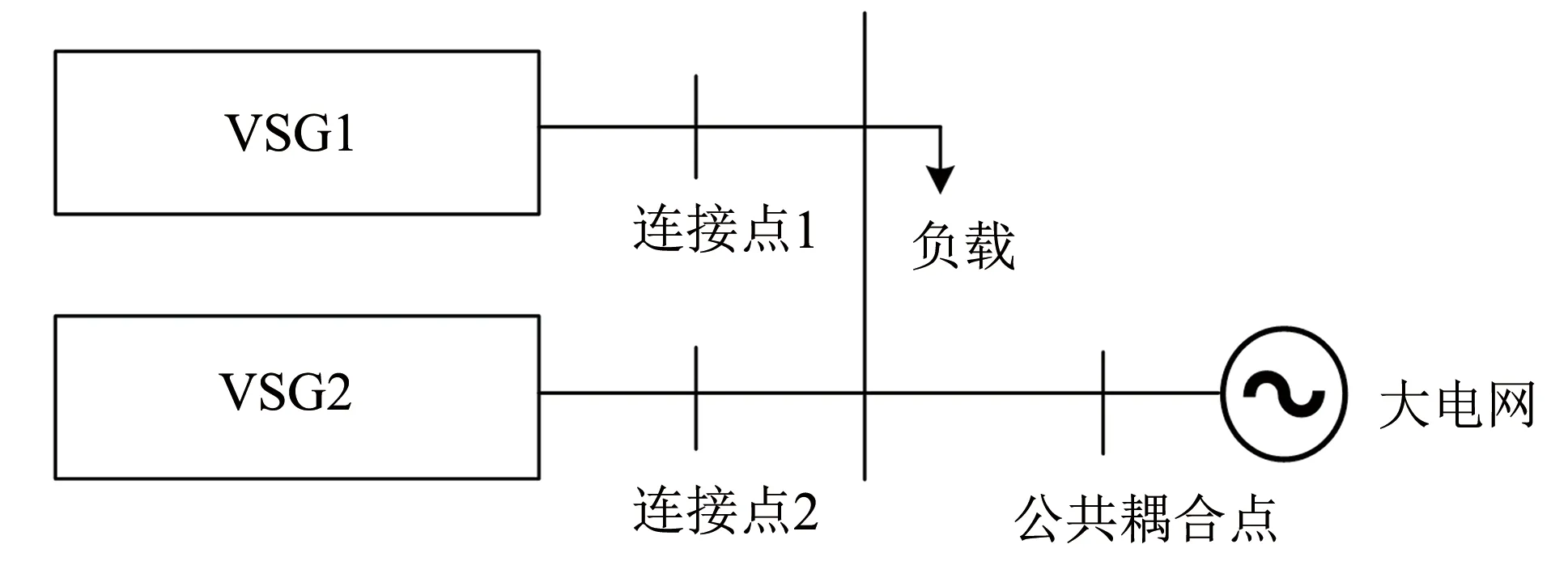
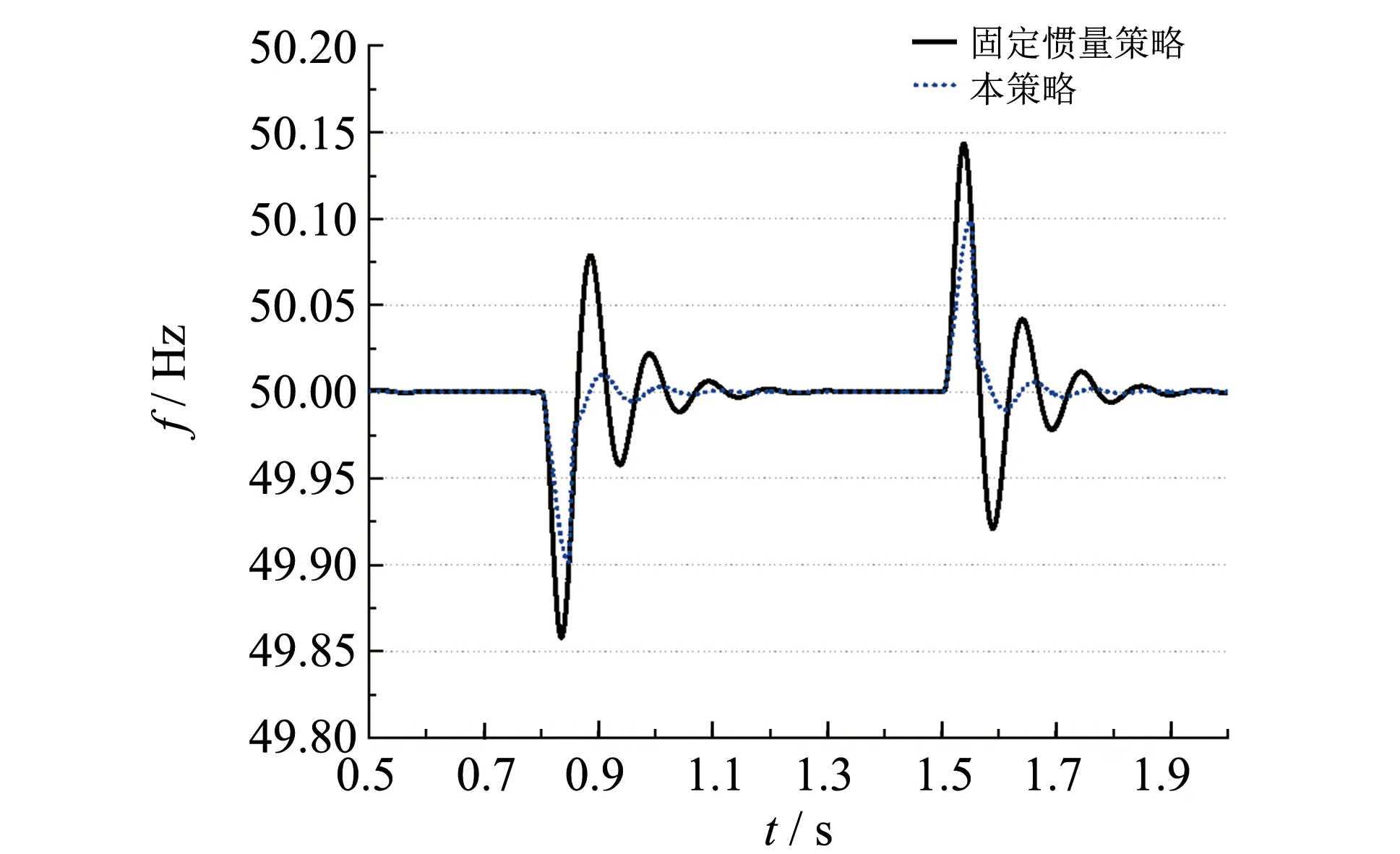
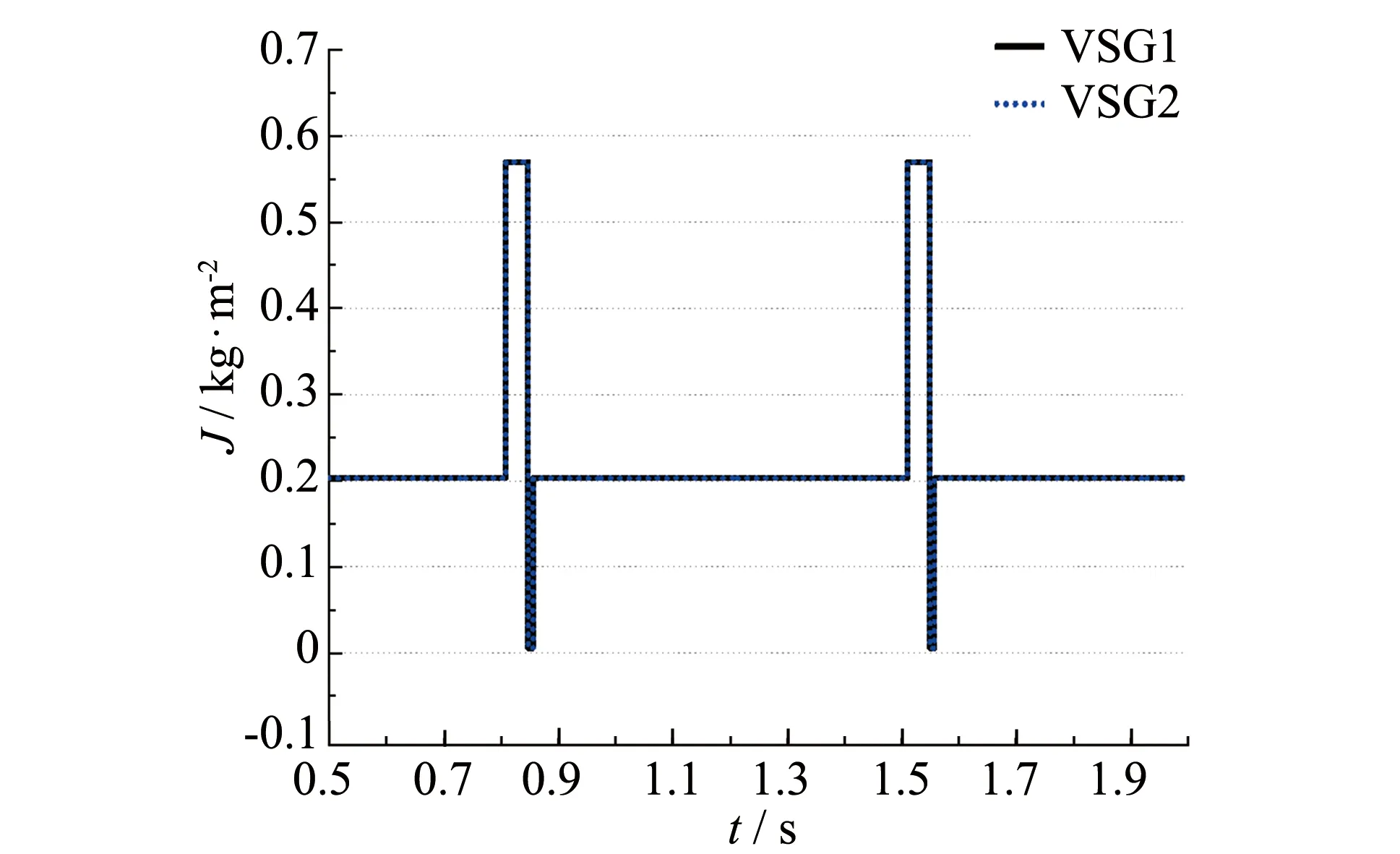
由tp< 1 s可得J< 0.57. 綜上所述,J的取值范圍為0.005 7 同步發(fā)電機(jī)的轉(zhuǎn)子慣量J的大小與其慣性時(shí)間常數(shù)H成正比關(guān)系,其中慣性時(shí)間常數(shù)H的表達(dá)式為: (10) 其中:SN為同步發(fā)電機(jī)額定功率. 對一般的同步發(fā)電機(jī),慣性時(shí)間常數(shù)H的數(shù)值范圍在2~9 s. 考慮到VSG的響應(yīng)時(shí)間不宜過慢,取慣性時(shí)間常數(shù)為2 s時(shí)對應(yīng)的轉(zhuǎn)子慣量為VSG系統(tǒng)的穩(wěn)態(tài)虛擬慣量,并結(jié)合上述求得的轉(zhuǎn)子慣量大小的取值范圍,可求得Js=0.202 8 kg·m2. 為驗(yàn)證所提綜合控制方案的正確性和優(yōu)越性,利用Matlab/Simulink仿真軟件搭建了單臺VSG接阻感性負(fù)載的仿真算例. VSG系統(tǒng)的主要參數(shù)[17, 20]和自適應(yīng)虛擬慣量參數(shù)如表1所示. 仿真系統(tǒng)運(yùn)行在微網(wǎng)模式下,初始運(yùn)行時(shí)接入有功負(fù)荷5 kW與無功負(fù)荷2 kvar,1 s時(shí)有功負(fù)載提升至10 kW,1.5 s時(shí)負(fù)載恢復(fù)正常,模擬系統(tǒng)負(fù)荷變動(dòng)所帶來的頻率穩(wěn)定性問題. 在相同的仿真條件下,對固定慣量策略、 文獻(xiàn)[12]策略以及本策略進(jìn)行對比驗(yàn)證,結(jié)果如圖6所示. 表1 VSG綜合控制方案系統(tǒng)部分參數(shù)設(shè)置 固定慣量策略的虛擬慣量大小設(shè)定為Js=0.202 8 kg·m2; 文獻(xiàn)[12]策略中虛擬轉(zhuǎn)子角速度變化率閾值C設(shè)為5,常數(shù)k設(shè)定為0.003,慣性時(shí)間常數(shù)的穩(wěn)定值為J0=0.202 8kg·m2; 本策略參數(shù)設(shè)定如表1所示. 由圖6可見,當(dāng)1 s有功負(fù)載突然增加時(shí),由于有功功率的缺失,頻率開始下降. 此時(shí),固定慣量算法與文獻(xiàn)[12]策略的頻率偏差量基本一致,為0.105 Hz,本策略為0.076 Hz(較前兩者的頻率偏差量降低27.6%). 當(dāng)頻率下降至最低值后,文獻(xiàn)[12]策略與本策略的頻率恢復(fù)穩(wěn)態(tài)區(qū)間(± 0.02 Hz)的時(shí)間基本一致,而固定慣量策略在頻率進(jìn)入穩(wěn)態(tài)區(qū)間后需經(jīng)過一個(gè)振蕩周期才穩(wěn)定在區(qū)間內(nèi). 當(dāng)1.5 s負(fù)載恢復(fù)正常時(shí),機(jī)械功率剩余,頻率上升. 固定慣量策略的頻率偏差量為0.113 Hz,文獻(xiàn)[12]策略為0.105 Hz,本策略為0.082 Hz(較固定慣量策略降低27.4%,較文獻(xiàn)[12]策略降低21.9%). 在頻率回復(fù)過程中,固定慣量策略與文獻(xiàn)[12]策略回復(fù)速度一致,在頻率進(jìn)入穩(wěn)態(tài)區(qū)間后,需經(jīng)過一個(gè)震蕩周期后才穩(wěn)定在區(qū)間內(nèi); 而本策略頻率回復(fù)至穩(wěn)態(tài)區(qū)間后,就穩(wěn)定在穩(wěn)態(tài)區(qū)間內(nèi),較前兩者有更短的調(diào)整時(shí)間. 虛擬慣量的變化曲線如圖7所示. 由圖7知,文獻(xiàn)[12]策略的虛擬慣量只在頻率變化率大的時(shí)候變動(dòng),且在1.05 s左右突增至1.42 s,超過了所求得的虛擬慣量的范圍. 由于虛擬慣量大于0的限制,對文獻(xiàn)[12]策略,其常數(shù)k的選取受到了限制,以至于出現(xiàn)頻率變化率小而偏差量大的情況時(shí),虛擬慣量的變化并不明顯,不能有效改善系統(tǒng)頻率響應(yīng)特性,如圖6與圖7中1.5 s負(fù)載恢復(fù)時(shí)所展示出的情況. 而對本策略而言,當(dāng)頻率超出穩(wěn)態(tài)區(qū)間且遠(yuǎn)離穩(wěn)態(tài)區(qū)間時(shí),虛擬慣量變大,減少頻率偏差量; 靠近穩(wěn)態(tài)區(qū)間時(shí),減小虛擬慣量,加快恢復(fù)速度. 圖6 三種策略的控制效果對比Fig.6 Comparison of control effects of three strategies 圖7 虛擬慣量控制效果對比 Fig.7 Comparison of virtual inertia control effects 圖8 本策略和文獻(xiàn)[13]策略的控制效果對比 Fig.8 Comparison of control effects of two strategies 在相同的仿真條件下,對本策略和傳統(tǒng)bang-bang虛擬慣量策略的控制效果進(jìn)行對比(如圖8所示),驗(yàn)證本策略可有效避免虛擬慣量在穩(wěn)態(tài)時(shí)頻繁產(chǎn)生抖動(dòng). 慣量的變化情況如圖9所示. 由圖8和圖9可見,兩者對頻率的控制效果基本一致,但是在虛擬慣量的控制上相差較多. 本策略下的虛擬慣量只在頻率超出穩(wěn)態(tài)區(qū)間時(shí)動(dòng)作. 而文獻(xiàn)[13]所提策略,由于沒有設(shè)置頻率穩(wěn)態(tài)區(qū)間,即使頻率穩(wěn)定在頻率區(qū)間內(nèi),其虛擬慣量也以較高的頻率在上下限之間來回階躍. 虛擬慣量高頻率的反復(fù)跳動(dòng),也使有功環(huán)阻尼在穩(wěn)態(tài)運(yùn)行時(shí)反復(fù)變化,增加了系統(tǒng)的不穩(wěn)定性. 同時(shí),對于儲能電池的頻繁控制也會(huì)影響其使用壽命. 圖9 虛擬慣量變化情況Fig.9 Virtual inertia variation of two strategies 為驗(yàn)證所提控制策略的適用性,利用仿真軟件搭建了兩臺VSG并聯(lián)運(yùn)行系統(tǒng)的仿真算例,如圖10所示. 其中,VSG1與VSG2的額定容量都為10 kW. 仿真系統(tǒng)運(yùn)行在微網(wǎng)模式下,初始運(yùn)行時(shí)接入有功負(fù)荷10 kW,0.8 s時(shí)有功負(fù)載突升至20 kW,1.5 s時(shí)負(fù)載恢復(fù)正常,模擬系統(tǒng)負(fù)荷變動(dòng)所帶來的頻率穩(wěn)定性問題,觀察本策略對VSG并聯(lián)造成的影響,如圖11~12所示. 由圖中可見,本策略對并聯(lián)運(yùn)行的VSG同樣具有較好的頻率控制效果. 圖10 VSG并聯(lián)運(yùn)行系統(tǒng)示意圖Fig.10 Schematic diagram of VSG parallel operation system 圖11 VSG1的頻率控制效果對比Fig.11 Comparison of frequency control effect of VSG1 圖12 VSG1與VSG2的虛擬慣量變化情況Fig.12 Virtual inertia variation of VSG1 and VSG2 提出基于改進(jìn)bang-bang控制的微網(wǎng)VSG自適應(yīng)虛擬慣量策略,在bang-bang控制的基礎(chǔ)上設(shè)定頻率穩(wěn)態(tài)區(qū)間,避免由于檢測精度等原因造成虛擬慣量抖動(dòng)而出現(xiàn)頻率抖動(dòng)的情況. 其次,穩(wěn)態(tài)慣量的設(shè)定綜合考慮了頻率響應(yīng)時(shí)間與頻率偏差量的影響. 并通過建立功率環(huán)的小信號等效模型,對虛擬慣量進(jìn)行穩(wěn)定性分析,確定了虛擬慣量的取值范圍. 最后,通過Matlab/Simulink仿真環(huán)節(jié)對比了三種慣量算法與并聯(lián)運(yùn)行情況下的控制效果,驗(yàn)證本方法的有效性.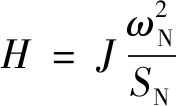
4 仿真分析
5 結(jié)語
猜你喜歡
教學(xué)考試(高考化學(xué))(2021年2期)2021-05-30 06:15:52
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:42
中學(xué)生數(shù)理化·高一版(2020年3期)2020-04-21 08:03:20
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學(xué)生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
小學(xué)生作文(低年級適用)(2018年9期)2018-10-08 02:29:48
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:10
數(shù)學(xué)大世界(2018年1期)2018-04-12 05:39:14
幸福(2017年18期)2018-01-03 06:34:53
中國衛(wèi)生(2016年8期)2016-11-12 13:26:50
