煤礦井下目標(biāo)定位的研究現(xiàn)狀與展望
2021-01-25 03:02:24葉偉
中國礦業(yè) 2021年1期
葉 偉
(1.安徽理工大學(xué)空間信息與測繪工程學(xué)院,安徽 淮南 232001;2.深部煤礦采動響應(yīng)與災(zāi)害防控國家重點實驗室,安徽 淮南 232001)
煤炭資源在我國的能源供應(yīng)方面仍處于主導(dǎo)地位[1]。煤礦開采涉及到的人員安全問題和設(shè)備正常運行與控制問題一直備受關(guān)注。我國煤礦井下地質(zhì)條件非常復(fù)雜(多斷層、采深變化范圍大),礦井巷道總長達(dá)幾十千米,巷道縱橫交錯且多彎曲,分布十分復(fù)雜,工作環(huán)境惡劣(粉塵大、潮濕、淋水),井下作業(yè)地點分散,井下人員和設(shè)備流動性大。地面管理人員監(jiān)督/查詢井下人員位置以及井下工作人員實時確定自身位置都是十分困難的,尤其井下光線黯淡,大量粉煤灰對指向標(biāo)志牌的遮擋也給井下人員分辨路線方向造成極大困擾。此外,為了對井下各種流動機器(主要是運煤機車、采煤機)和設(shè)備進(jìn)行準(zhǔn)確控制和管理,需要建立能夠?qū)崟r對井下人員和運煤機車、采煤機進(jìn)行位置搜索、進(jìn)行路徑分析、進(jìn)行導(dǎo)航的井下定位系統(tǒng),以實現(xiàn)煤礦井下安全生產(chǎn)以及高效調(diào)配生產(chǎn)資源和管理生產(chǎn)。根據(jù)《國家能源技術(shù)創(chuàng)新行動計劃(2016—2030年)》可知,在未來數(shù)十年中,我國大部分煤礦仍難以達(dá)到完全無人化開采[2],因此井下人員精確定位研究仍是一項重要任務(wù)。國家安全生產(chǎn)監(jiān)督管理總局提出的機械化換人、自動化減人科技強安專項行動,將煤炭智能化開采列為重點研究方向和研發(fā)任務(wù)[2]。煤礦智能化開采是在當(dāng)前采用的機械化、自動化采煤機制中加入人工智能元素,并加以融合、革新和完善。煤礦智能化開采是煤炭開采方式轉(zhuǎn)型的有效手段,而研發(fā)高精度、低成本、環(huán)境適應(yīng)性強的井下定位技術(shù)是實現(xiàn)煤礦智能化走向成熟階段和實現(xiàn)普遍無人化開采的關(guān)鍵環(huán)節(jié)[3]。在煤礦智能化開采研究中,井下各種自動化機器都需要進(jìn)行精確的定位和導(dǎo)航,以保證地面工作人員可以對井下無人化開采進(jìn)行精準(zhǔn)控制和管理。應(yīng)對井下特殊環(huán)境的人員和運輸、采煤機器定位需求,近年來出現(xiàn)了許多井下定位導(dǎo)航技術(shù)。相繼出現(xiàn)或還處于研究當(dāng)中的井下定位導(dǎo)航技術(shù),多數(shù)是依賴于基站和參考站之間的無線信號傳輸、信號接收、信號記錄和處理、信號反饋,并結(jié)合基站、參考站內(nèi)部定位算法解算出參考站的位置并將定位信息傳送到地面控制平臺和井下各參考站。對井下目標(biāo)定位中涉及的基站和參考站進(jìn)行如下定義:基站,是基于無線信號物理特性進(jìn)行設(shè)計的定位系統(tǒng)的主要組成部分,一般固定在兩側(cè)巷道壁上,與地面監(jiān)測控制系統(tǒng)通過無線信號相連,負(fù)責(zé)向參考站或目標(biāo)節(jié)點發(fā)送無線信號并接收參考站或目標(biāo)節(jié)點的反饋信號,進(jìn)而根據(jù)內(nèi)部系統(tǒng)、程序解算出參考站和目標(biāo)節(jié)點的準(zhǔn)確位置。基站與參考站之間周期性地通過無線信號傳輸交互信息,獲取參考站的位置信息并將其發(fā)布到地面控制平臺和參考站。實現(xiàn)地面工作人員實時掌握井下目標(biāo)的位置,也讓井下工作人員及時明確自己的位置。參考站,也可稱為目標(biāo)節(jié)點,因目前的井下目標(biāo)定位主要是針對人員和運煤機車、采煤機等,對于人員所使用的參考站相對應(yīng)于基站的移動端,用于接收基站發(fā)出的信號,根據(jù)參考站接收到信號時信號的物理狀態(tài)和參考站所捕獲到的物理信息等對參考站內(nèi)部系統(tǒng)進(jìn)行不同的設(shè)計,從而對接收到的信號特征、時間到達(dá)節(jié)點等進(jìn)行記錄并根據(jù)內(nèi)部設(shè)計反饋不同的信號給基站,由此衍生出不同的定位方法。
1 井下人員定位的研究現(xiàn)狀
諸多學(xué)者結(jié)合WiFi、ZigBee、無線傳感網(wǎng)(wireless sensor networks,WSN)以及射頻信號(radio frequency identification,RFID)[4-9]等無線通信原理研究出一系列井下人員定位技術(shù)和系統(tǒng),并在國內(nèi)一些礦井得到應(yīng)用。基于WiFi技術(shù)的井下人員定位系統(tǒng)復(fù)雜度較高,功耗高,建設(shè)成本高[6];基于ZigBee技術(shù)的井下人員定位系統(tǒng)相比基于WiFi技術(shù)的復(fù)雜度低,功耗小,成本低,但傳輸距離短,無法滿足井下巷道長距離和縱橫交錯的需求,而且可傳輸數(shù)據(jù)量小,不適用于井下所需采集較大數(shù)據(jù)量的聲音、圖像等數(shù)據(jù)信息,即使結(jié)合這兩種技術(shù)會在精度和傳輸距離上有所提升,但仍會增加系統(tǒng)復(fù)雜度和建設(shè)成本[6];基于WSN的井下目標(biāo)定位技術(shù),若要增加目標(biāo)區(qū)域的信號覆蓋面,必須增加節(jié)點數(shù),相應(yīng)會增加系統(tǒng)復(fù)雜度,且定位精度較低[7];基于RFID技術(shù)的井下人員定位系統(tǒng)更多的是用于人員身份識別、反映位置分布情況,實為一種考勤定位系統(tǒng),并非真正的動態(tài)跟蹤定位系統(tǒng)[8-9]。此外,基于WiFi、ZigBee、RFID的井下人員定位系統(tǒng)無法對井下人員進(jìn)行動態(tài)定位[10],抗多徑效應(yīng)能力差,無法在斷電斷網(wǎng)的情況下進(jìn)行定位。UWB定位技術(shù)是目前井下定位中的主流定位技術(shù)之一,并衍生出許多融合版或改進(jìn)版UWB井下定位技術(shù)[11]。判定一種井下定位系統(tǒng)或技術(shù)的好壞主要通過相關(guān)指標(biāo)進(jìn)行評價[12],見表1。
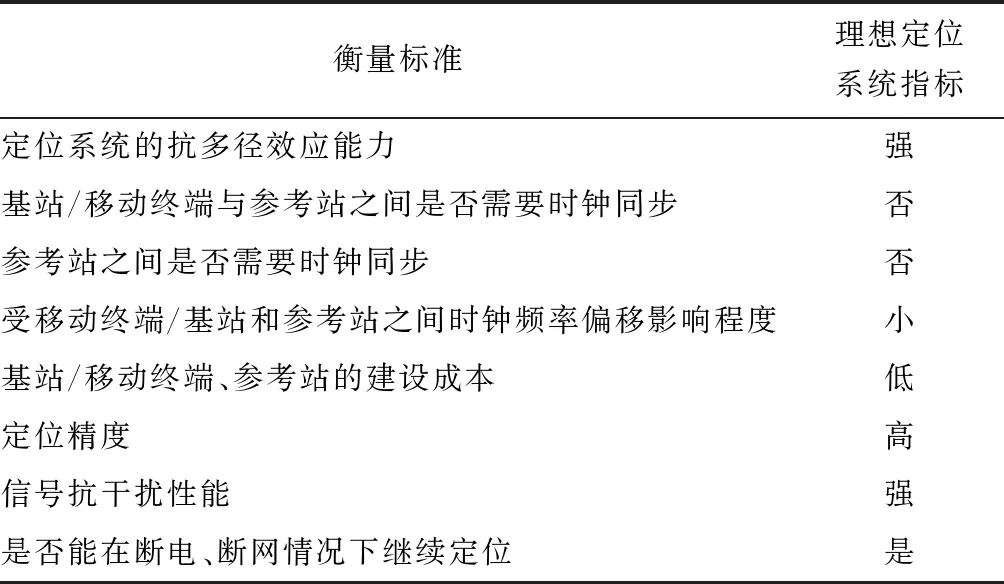
表1 井下定位系統(tǒng)性能好壞的判定標(biāo)準(zhǔn)Table 1 Criteria for the performance of positioningsystems in underground roadway
1.1 iBeacon井下定位技術(shù)
iBeacon技術(shù)是2013年蘋果公司提出的新型室內(nèi)定位技術(shù)[4-5]。信標(biāo)和移動終端共同構(gòu)成基于iBeacon的井下定位系統(tǒng),并采用藍(lán)牙4.0通信協(xié)議進(jìn)行信標(biāo)和移動終端之間的信號傳輸,這里的移動終端具有類似于基站的功能,信標(biāo)具有類似于參考站或目標(biāo)節(jié)點的功能。
iBeacon井下定位系統(tǒng)使用藍(lán)牙信標(biāo)體積小且用鈕扣電池供電,可確保在斷電情況下繼續(xù)定位,減小了施工難度;相比傳統(tǒng)定位技術(shù),定位精度有很大提升,可以確保定位誤差在1.5~2.5 m范圍內(nèi),更好地滿足井下定位的需求。實時定位的同時可以給井下人員移動終端推送地面預(yù)警廣播信息,方便井下人員在遇到事故時選擇最佳逃生路線。iBeacon井下定位系統(tǒng)目前使用藍(lán)牙4.0通信技術(shù),通信傳輸采用AES-128加密技術(shù),能耗更低,數(shù)據(jù)傳輸安全性也大大提升[4-5]。 相比WiFi通信技術(shù),iBeacon技術(shù)傳輸周期占空比小,使得信標(biāo)之間的相互干擾更小[4]。 iBeacon技術(shù)的信號傳輸距離可達(dá)到100 m[5],但移動終端接收到的信號強度會隨著移動終端與信標(biāo)之間的距離而變化,距離超過傳輸距離則無法接收到信號,在極限傳輸距離內(nèi)相距越遠(yuǎn),信號強度越弱,因此需要加大信標(biāo)的布設(shè)密度,一定程度上會增加建設(shè)成本。井下巷道彎曲、機車行進(jìn)、潮濕、高溫等復(fù)雜的環(huán)境對藍(lán)牙信號傳輸是一種較大的挑戰(zhàn)。
iBeacon信標(biāo)布設(shè)具有區(qū)域獨立性,雖然信標(biāo)成本低,可以在井下復(fù)雜區(qū)域進(jìn)行高密度布設(shè),但移動終端的建設(shè)成本較高,目前只在國內(nèi)重要礦井或像井下爆破庫、水泵房、掘進(jìn)巷道等礦井中一些重點監(jiān)測區(qū)域進(jìn)行布設(shè)。
iBeacon技術(shù)井下定位中的成功應(yīng)用案例:文獻(xiàn)[4]中給出國內(nèi)某礦-320平面信標(biāo)布設(shè)情況圖,可知該礦井的iBeacon定位系統(tǒng)的應(yīng)用范圍僅限于某些重要井巷區(qū)域。文獻(xiàn)[13]公布了2017年韓國首爾某礦率先使用RECO Beacons信標(biāo)進(jìn)行井下目標(biāo)定位,這種定位系統(tǒng)達(dá)到了包括聯(lián)邦通信委員會(FCC)、韓國認(rèn)證(KC)、歐洲合格認(rèn)證(CE)和技術(shù)法規(guī)合格認(rèn)證(TELEC)等電氣和通信機構(gòu)的安全認(rèn)證,并且這種信標(biāo)能很好適應(yīng)地下礦井的潮濕、多粉煤灰的惡劣環(huán)境。
1.2 UWB井下動態(tài)定位技術(shù)
核心原理為測距或測向的UWB定位技術(shù)按照在距離或角度測量中所用特征參數(shù)的不同,分為UWB信號強度(received signal strength,RSS)定位法、AOA UWB定位法、TOA UWB定位法和TDOA UWB定位法。
UWB傳輸信號在井下彎道多的巷道中傳播時會產(chǎn)生多路徑效應(yīng)。此外,巷道壁凹凸不平且有支護(hù)、照明等障礙物遮擋以及巷道內(nèi)多水潮濕等環(huán)境因素也會造成信號在傳播過程中產(chǎn)生多路徑效應(yīng)[10]。因此,信號在井下巷道內(nèi)傳播會因多路徑效應(yīng)產(chǎn)生一定的衰減[11]。
UWB信道環(huán)境較為復(fù)雜,多徑分量分布廣,信號在傳輸過程中不可避免路徑損耗的影響。要增強信號到達(dá)定位目標(biāo)的強度,單獨使用RSS方法達(dá)到效果較小且RSS方法無法發(fā)揮UWB超帶寬的優(yōu)勢,還需要在信號傳輸中考慮建立多路徑環(huán)境下能量收集模型和信道環(huán)境下的信號衰弱補償模型[11]。
基于AOA的UWB定位方法在實現(xiàn)上相對簡單。基于AOA的定位技術(shù)在信號傳播中需要保持通視條件良好,而井下巷道分布復(fù)雜、縱橫交錯,且彎道多,因此而產(chǎn)生的多路徑效應(yīng)信號衰減和通視條件差會大大降低AOA定位的精度[11]。可以考慮將AOA定位技術(shù)與其他定位技術(shù)/方法進(jìn)行組合定位,并將AOA定位技術(shù)獲取的位置信息作為參考,再用其他定位技術(shù)/方法獲取的信息進(jìn)行修正從而在減少參考站數(shù)、減小成本前提下提高定位精度。
基于TOA可實現(xiàn)對目標(biāo)節(jié)點(井下人員)的定位;TOA方法是利用信號傳播時間延遲進(jìn)行測距[14],確定目標(biāo)節(jié)點與信號輸出端的距離進(jìn)而確定人員位置。由于要求參考站與基站時鐘嚴(yán)格同步,這對于深井作業(yè)的井下人員來說,接收端時鐘易受到地磁場的干擾,導(dǎo)致時鐘的偏差,所以存在一個同步誤差,對定位精度影響較大。而在現(xiàn)實中實現(xiàn)參考站與基站之間的絕對同步較為困難,即使實現(xiàn)也會因設(shè)備復(fù)雜度提高增加建設(shè)成本。
TDOA定位方法通過對信號到達(dá)目標(biāo)節(jié)點(井下人員)的時間延遲進(jìn)行作差進(jìn)而實現(xiàn)對目標(biāo)節(jié)點的定位[15];TDOA定位的系統(tǒng)相對簡化且更容易實現(xiàn),它不需要基站與接收端保持時鐘同步,只需要參考站間保持時鐘同步[11,15-16]。TDOA定位技術(shù)會對信號到達(dá)時間進(jìn)行作差,會在一定程度上提高定位精度。但是由于TDOA定位信號是雙向傳播,加大了功率消耗,間接增加了使用成本。
卡爾曼濾波技術(shù)具有良好的跟蹤性能[16-17],將其應(yīng)用到無線定位技術(shù)領(lǐng)域,能夠有效達(dá)到動態(tài)跟蹤定位的效果。有研究者針對卡爾曼濾波無法單獨解決非線性問題的局限性,提出一種適用于處理非線性問題的改進(jìn)型卡爾曼濾波算法。
1.3 異步測時井下定位技術(shù)
異步測時定位技術(shù)是為了克服現(xiàn)有井下人員定位技術(shù)的定位誤差大的問題而提出的[12]。異步測時是在考慮到煤礦井下巷道狹長,寬度和高度遠(yuǎn)小于長度,將巷道看成是一維狀態(tài)下設(shè)計的,將煤礦井下人員定位簡化成一維定位[12]。
異步測時井下定位精度僅取決于參考站收發(fā)信號。信號強度、信號發(fā)射功率、信號接收靈敏度、信號多路徑效應(yīng)衰減以及巷道環(huán)境造成的信號衰減都不會影響異步測時的定位精度。異步測時定位無需考慮基站、參考站之間的時間同步問題,大大降低了基站、參考站的建設(shè)難度和成本。相比于TWR、SDS-TWR定位技術(shù),異步測時定位法克服時鐘頻率偏移的能力要高很多。異步測時定位法需要在井下相距一定距離時安裝對應(yīng)的參考站以保證相鄰參考站可以相互通信,但是井下巷道縱橫交錯,復(fù)雜且多彎道,要確保信號的正常傳播和參考站的正常收發(fā)信號需要縮短相鄰參考站的間隔,而井下巷道長達(dá)數(shù)十千米,這將增加參考站的建設(shè)成本。
1.4 視頻礦燈井下定位技術(shù)
視頻礦燈定位技術(shù)是以無線網(wǎng)絡(luò)為基礎(chǔ),添加包含圖像、聲音等多媒體元素,進(jìn)而升級為多媒體無線傳感器網(wǎng)絡(luò)(wireless multimedia sensor networks,WMSNs)[18-25]。利用礦燈亮度與井下暗淡環(huán)境形成強烈反差,從而可以將礦燈照明作為井下人員的多媒體圖像特征辨識物。在多媒體無線傳感器網(wǎng)絡(luò)中植入背景差分法圖像識別程序,進(jìn)而結(jié)合單(多)攝像機視頻定位方法對井下人員進(jìn)行定位[21]。在WMSNs多媒體監(jiān)測中,定位分為多攝像機視頻協(xié)作定位[21-22]和單攝像機視頻非協(xié)作定位[23-25]。
視頻礦燈定位技術(shù)添加了多媒體元素的無線傳感器網(wǎng)絡(luò),具有多種多媒體感知功能、無線傳輸更加快捷方便、多種拓?fù)浣Y(jié)構(gòu)相互變換簡單等特點。煤礦井下巷道分布情況大致可分為狹長帶狀分布的簡單巷道和縱橫交錯且多轉(zhuǎn)角的復(fù)雜巷道兩種情況;在煤礦井下弱光、多粉塵環(huán)境中,無論肉眼還是機器都很難分辨井下人員和巷道背景,容易混為一體。在帶狀簡單巷道中可采用單攝像機視頻非協(xié)作定位方法,在復(fù)雜巷道中可采用多攝像機視頻協(xié)作定位方法。據(jù)可靠資料顯示,目前WMSNs視頻礦燈井下人員定位誤差可限制在半米以內(nèi)。顯然,WMSNs定位技術(shù)的定位精度較高。但是建設(shè)成本也很高,尤其是對于復(fù)雜巷道的井下人員定位。因此這種定位方法只能在一些重要礦井或規(guī)模較大的礦井中推廣實現(xiàn)。此外,該方法需在電力、網(wǎng)絡(luò)正常情況下才能正常定位。
1.5 TWR井下定位技術(shù)
為了克服TOA定位中基站與參考站間需時鐘同步的局限性,有學(xué)者在TOA基礎(chǔ)上提出TWR定位方法。 TWR定位方法是通過參考站與參考站之間的雙向信號傳輸實現(xiàn)測距并進(jìn)行定位[26-27]。與TOA相似的是,信號發(fā)送功率、信號感知靈敏度以及信號傳輸衰減等對TWR的定位精度沒有影響。TWR定位方法無需基站與參考站之間時鐘同步,降低了基站和參考站的復(fù)雜度和建設(shè)成本,但基站和參考站的時鐘頻率偏移會對定位精度產(chǎn)生一定影響[26-27]。
SDS-TWR定位方法是在TWR測距過程的基礎(chǔ)上,再主動與基站進(jìn)行一次雙向信號傳輸過程實現(xiàn)測距[28]。SDS-TWR定位方法不需要基站和參考站之間時間同步,相比TWR定位方法降低了基站和參考站間的時鐘頻率偏移,基站的復(fù)雜度和建設(shè)成本降低,定位精度相對提高,適用于煤礦井下人員的定位[28-30]。
1.6 多傳感器信息融合井下定位技術(shù)
多傳感器信息融合井下人員定位是利用IMU模塊—綜合了三軸加速度計、三軸陀螺儀、磁力計以及氣壓計等組件采集數(shù)據(jù)并進(jìn)行預(yù)處理[31-35]。利用該模塊獲取的井下人員相對地面的深度,在三維定位中扣除該深度數(shù)據(jù)則簡化成X方向、Y方向的二維定位[33]。在二維面內(nèi)利用改進(jìn)步行者航位推算算法獲取井下人員的基本移動軌跡[36]。最后,利用隨機森林(random forest,RF)分類算法和巷道空間分布先驗知識對電磁干擾和位置解算累積誤差進(jìn)行修正[35]。
加速度計和陀螺儀在復(fù)雜的煤礦井下特殊地理環(huán)境中很容易受到電磁干擾。為了提高井下特殊位置的人員定位精度,袁亞洲等[30]提出使用RF分類算法結(jié)合設(shè)置閾值的方法對人員的活動進(jìn)行準(zhǔn)確分類,并將分類后的人員動作與井下巷道空間分布先驗知識相結(jié)合來修正井下特殊位置的定位誤差[30,32-36]。利用地圖先驗知識與人員動作識別的位置估算方法能夠有效利用巷道的空間分布先驗知識,得到井下人員的絕對位置。利用地圖先驗知識和人員動作識別實際上是一種機器學(xué)習(xí)和應(yīng)用的過程,在機器學(xué)習(xí)中,RF算法實際上是一種擁有多個決策樹的分類器[36],相比于其他算法它具有能夠解決過擬合問題、訓(xùn)練速度快且模型泛化性能強的優(yōu)勢。多傳感器信息融合井下人員定位能夠有效減小誤差累積,通過主題模型算法對傳感器特征集進(jìn)行降維[37],并作為后續(xù)機器學(xué)習(xí)中RF算法的輸入集。再利用巷道的空間分布先驗知識對井下人員的特殊點位置誤差進(jìn)行修正,可以提高并增強定位系統(tǒng)的定位精度及魯棒性[36-39]。
相比于目前基于無線信號的井下定位方法,多信息融合定位方法定位精度有較大提升。通過RF分類算法識別特殊點進(jìn)行位置修正只是根據(jù)井下先驗知識進(jìn)行機器學(xué)習(xí),而井下環(huán)境復(fù)雜且多變,定位可能還不夠準(zhǔn)確,可將無線定位方法作為輔助定位。尚待研究開發(fā)出一種節(jié)能型自適應(yīng)無線輔助定位方法,可以實現(xiàn)網(wǎng)絡(luò)節(jié)點實時睡眠和喚醒。
1.7 RFID與地磁組合井下定位技術(shù)
地磁定位技術(shù)發(fā)明于20世紀(jì)60年代,長期以來主要應(yīng)用在軍事導(dǎo)航定位方面。近幾年,國內(nèi)外相關(guān)學(xué)者就地磁定位技術(shù)在民用方面的應(yīng)用進(jìn)行了一系列基礎(chǔ)研究[38-45]。汪金花等[44-45]構(gòu)建了基于地磁導(dǎo)航定位的井下避險系統(tǒng)。關(guān)于井下地磁定位的研究,汪金花等[38]進(jìn)行了基于RFID井下定位的地磁匹配研究并進(jìn)行了仿真實驗,并提出將標(biāo)簽識別與地磁匹配組合的井下定位方法(geomagnetic and RFID combined positioning method,GRPM)。
GRPM井下定位技術(shù)是RFID標(biāo)簽識別與地磁匹配組合型定位技術(shù)[39]。這是目前現(xiàn)有的井下定位技術(shù)中較為前沿的定位技術(shù),不僅可以提供日常的井下人員的定位和管理,還可以實現(xiàn)在斷電和斷網(wǎng)的情況下井下自主定位和導(dǎo)航,尤其是在井下出現(xiàn)事故時的應(yīng)急救援中發(fā)揮關(guān)鍵的井下人員搜索定位和逃生導(dǎo)航作用。井下人員通過GRPM技術(shù)設(shè)計的定位設(shè)備可以單獨、自主定位,還可利用設(shè)備的可視化功能查詢路線和自身在巷道中的位置。井下復(fù)雜環(huán)境對地磁的影響較為明顯,地磁在巷道內(nèi)的分布呈現(xiàn)出間斷性連續(xù)的狀況。GRPM方法是一種具有較高地程序/系統(tǒng)兼容性的定位系統(tǒng),可以與現(xiàn)有的其他井下定位技術(shù)集成[37]。井下人員攜帶GRPM定位移動設(shè)備在巷道中行進(jìn)時,可實時記錄走過的精確路徑信息[38-39]。GRPM系統(tǒng)與其他井下定位技術(shù)/系統(tǒng)進(jìn)行組合使用進(jìn)行數(shù)據(jù)互補和信息共享需要保證井下網(wǎng)絡(luò)通信良好以及需要經(jīng)過系統(tǒng)控制中心進(jìn)行數(shù)據(jù)轉(zhuǎn)換[37]。但是,GRPM井下定位技術(shù)目前處于初級研究階段,定位精度方面還有很大提升空間。地磁噪聲大小、地磁空間分布適配性、裝置的地磁傳感器靈敏程度、匹配適應(yīng)性強弱等諸多因素對GRPM的實際定位精度都會產(chǎn)生影響[37-39]。汪金花等[37-38]對地磁匹配算法進(jìn)行優(yōu)化并進(jìn)行匹配試驗,得出平均誤差平方和算法、海明距離算法、歸一化積相關(guān)(normalizated product correlation,NPROD)算法匹配定位精度很高,都能達(dá)到井下定位的需求,其中NPROD計算速度和匹配精度都要高于其他算法。對于GRPM井下人員定位技術(shù),需進(jìn)一步對井下地磁基準(zhǔn)的建立、地磁匹配模型的修正、結(jié)合巷道空間分布先驗知識以及結(jié)合WebGIS對巷道地物和人員分布特征進(jìn)行查詢開展試驗研究[45-47]。
1.8 基于改進(jìn)UWB算法的井下定位技術(shù)
UWB定位系統(tǒng)發(fā)射的信號是具有強穿透性、高時間分辨率以及抗干擾性能強的納秒級秒脈沖信號[48]。UWB定位首先測量目標(biāo)節(jié)點到定位基站的距離進(jìn)行目標(biāo)節(jié)點的基礎(chǔ)定位,對信道多余觀測信息進(jìn)行相關(guān)處理進(jìn)行位置修正提高定位精度。UWB定位方程是一個非線性方程組[49]。對于非線性方程的求解通常采用最小二乘法[50-51]、Chan算法[52]、Taylor展開算法進(jìn)行求解[53-54]。最小二乘算法和Chan算法求解非線性方程得到的都不是最優(yōu)解且隨著巷道環(huán)境變化也會產(chǎn)生影響[50-52]。謝芝玉等[48]提出基于Taylor展開的UWB井下定位算法,提高了UWB定位方法的精確度,提高了環(huán)境適應(yīng)性。
2 捷聯(lián)慣性導(dǎo)航定位技術(shù)
井下運煤機車、采煤機定位技術(shù)主要有紅外光定位、無線傳感定位、超聲波定位以及基于捷聯(lián)慣性導(dǎo)航的定位[55-59]。定位精度較高的要數(shù)基于捷聯(lián)慣性導(dǎo)航的采煤機定位技術(shù)。
捷聯(lián)慣性導(dǎo)航系統(tǒng)中采用的慣性器會發(fā)生滑移,定位誤差會隨時間加速累積。而井下的機車、采煤機等需長時間工作,采用捷聯(lián)慣性導(dǎo)航定位進(jìn)行井下運輸機車、采煤機定位,其定位精度會與工作時間成反比。國內(nèi)大多數(shù)煤層都存在一定的傾角,需要對井下工作的采煤機進(jìn)行三維定位。文獻(xiàn)[55]提出的捷聯(lián)慣導(dǎo)/軸編碼器組合的井下采煤機定位方法是利用捷聯(lián)慣性導(dǎo)航定位技術(shù)測量運煤機車、采煤機的工作姿態(tài)并生成運煤機車、采煤機坐標(biāo)變換方向余弦矩陣,軸編碼器獲取機器的位移增量矩陣,并利用余弦矩陣和位移增量矩陣進(jìn)行一系列坐標(biāo)轉(zhuǎn)換實現(xiàn)將采煤機在采煤機坐標(biāo)系下的位置變換到地心坐標(biāo)系下的位置,進(jìn)而實現(xiàn)采煤機的三維定位。基于捷聯(lián)慣性導(dǎo)航/軸編碼器組合的采煤機定位方法可以有效抑制采煤機純慣性定位誤差隨時間累積的趨勢,提高了采煤機慣性導(dǎo)航定位的精度[52]。 但是捷聯(lián)慣性導(dǎo)航系統(tǒng)與軸編碼器結(jié)合大大增加了成本。
3 井下定位技術(shù)的研究展望
目前關(guān)于井下定位的研究大多集中在井下人員定位方面,在井下智能采煤機、智能機器人定位導(dǎo)航方面的研究相對較少。
1) 克服iBeacon定位技術(shù)移動終端的信號強度會隨著終端與信標(biāo)間的距離變化而變化的難題不僅可以提高定位精度,還可以減少信標(biāo)的布設(shè)數(shù)量,節(jié)約成本;基于藍(lán)牙4.0的iBeacon信標(biāo)發(fā)射的信號強度會受到固體障礙物、環(huán)境濕度和溫度的影響,井下(尤其深井)巷道彎曲、機車行進(jìn)、潮濕、高溫等復(fù)雜的環(huán)境對信號傳輸是一種較大的挑戰(zhàn)。
2) 基于UWB技術(shù)(包括相關(guān)改進(jìn)算法和與其他技術(shù)結(jié)合的定位系統(tǒng))的井下目標(biāo)定位系統(tǒng)適用于井下人員、機車、采煤機等緩慢行進(jìn)、連續(xù)動態(tài)的定位需求。但UWB信號在井下封閉環(huán)境中易受到巷道多彎道特性和液壓支架,巷道壁等的遮擋,形成非視距狀態(tài)下的定位,而巷道壁組成成分復(fù)雜,一方面造成UWB信號無法穿透某些介質(zhì)而無法進(jìn)行定位,另一方面UWB信號進(jìn)行多次反射傳遞給信標(biāo)易造成時間接收誤差降低定位精度,且解決非視距定位的模型十分復(fù)雜,這也是目前亟待解決的問題。因此在井下目標(biāo)定位中,使用UWB技術(shù),需要增設(shè)基站數(shù),尤其在彎曲巷道處,宜采用多基站UWB定位系統(tǒng)。UWB定位系統(tǒng)在井下基站與信標(biāo)之間的傳播時間對基站、信標(biāo)之間的時鐘同步性要求較高,而井下的時鐘易受到地磁場的影響造成不同步,從而對定位精度產(chǎn)生較大影響。結(jié)合SDS-TWR算法可利用定位標(biāo)簽和定位基站之間二次通信彌補時鐘偏移導(dǎo)致的誤差。
3) 基于UWB技術(shù)的TDOA定位方法雖然只有參考站之間需要時鐘同步,仍會增加參考站的復(fù)雜度和建設(shè)成本,將其與擴展卡爾曼濾波結(jié)合,使得其具有動態(tài)定位的功能,但對于非線性觀測方程的線性近似仍會給定位精度帶來一定影響,可以考慮加入Taylor展開方法對非線性觀測方程進(jìn)行求解,提高動態(tài)定位的精度。
4) 考慮異步測時定位法的優(yōu)勢以及地磁匹配定位方法具有兼容性且適用于災(zāi)后斷電斷網(wǎng)情況下的井下定位,如何將異步測時法與GRPM地磁匹配定位方法結(jié)合是一種新的井下定位展望。
5) 井下地磁測量時噪聲干擾較大,地磁異常場空間分布不明顯、緩變或特征相似情況下的地磁匹配定位精度低對新的地磁匹配定位算法有著新的挑戰(zhàn)。
4 結(jié) 語
煤礦安全生產(chǎn)和智能化發(fā)展的需求推動了煤礦井下定位的產(chǎn)生和發(fā)展。自井下定位技術(shù)出現(xiàn)以來,不同學(xué)者提出的基于WiFi、ZigBee、WSN以及RFID等通信技術(shù)形成了一系列井下人員定位技術(shù)或系統(tǒng),但由于定位精度低,信號傳輸在井下復(fù)雜環(huán)境中易受到限制,成本高而未廣泛推廣使用。近年來,諸多學(xué)者相繼提出了iBeacon定位算法、RSS UWB井下人員定位技術(shù)、AOA UWB井下人員定位技術(shù)、TOA UWB井下人員定位技術(shù)、TDOA UWB井下人員定位技術(shù)、基于改進(jìn)卡爾曼濾波的TDOA UWB井下人員定位技術(shù)、WMSNs視頻礦燈定位技術(shù)、TWR和SDS-TWR定位方法、異步測時煤礦井下人員定位、多傳感器信息融合煤礦井下人員定位、GRPM煤礦井下人員定位技術(shù)、基于捷聯(lián)慣性導(dǎo)航/軸編碼器的井下采煤機定位、基于改進(jìn)UWB算法的井下機器(采煤機、機車等)定位,這些定位方法在與井下復(fù)雜環(huán)境實現(xiàn)完美契合上都或多或少存在一些局限性。研究井下UWB定位、地磁定位算法與其他定位算法的結(jié)合、更高精度的地磁匹配算法以及引進(jìn)改進(jìn)卡爾曼濾波算法結(jié)合高精度定位算法,實現(xiàn)可以克服井下巷道復(fù)雜環(huán)境影響、無需時鐘同步、低成本、高精度定位,為井下動目標(biāo)跟蹤、膠輪車監(jiān)控等應(yīng)用需求提供高精度、大容量的實時位置服務(wù)是未來井下人員、機器精確定位的目標(biāo),也是使煤礦智能化從初級階段邁向成熟階段的關(guān)鍵步驟。
猜你喜歡
防爆電機(2022年1期)2022-02-16 01:14:06
河北畫報(2021年2期)2021-05-25 02:07:50
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
山西大同大學(xué)學(xué)報(自然科學(xué)版)(2016年2期)2016-12-12 03:19:28
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(2015年3期)2015-11-11 17:20:00
河南科技(2014年18期)2014-02-27 14:14:58
河南科技(2014年4期)2014-02-27 14:07:18